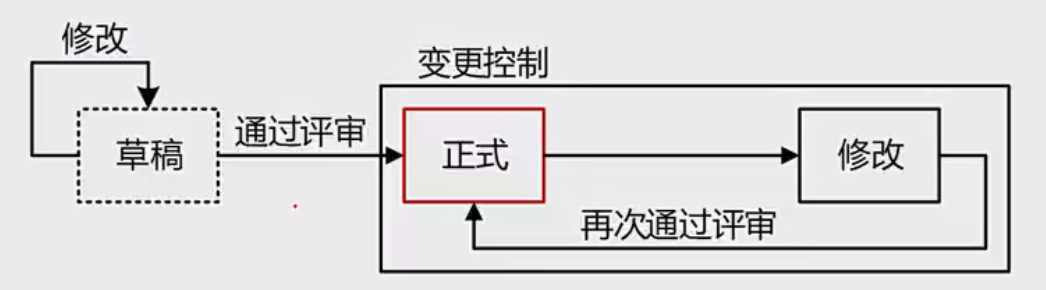
ORCA-3D避障算法解析
二维ORCA原理参考:
https://zhuanlan.zhihu.com/p/669426124
ORCA原理图解
1. 找到避障速度增量 u
碰撞处理分为三种情况:
(1)没有发生碰撞,且相对速度落在小圆里
(2)没有发生碰撞,且相对速度落在圆锥里
(3)发生碰撞,马上做出反应

timeStep 决定了仿真每一步的时间更新间隔,是系统的时间推进基础。较小的 timeStep 可以提高仿真的精度,但会增加计算量。
timeHorizon 决定了智能体在进行避障计算时预测的时间范围。较大的 timeHorizon 值使得智能体可以更早预测潜在碰撞,但会减少它的速度选择自由度。
timeStep 是碰撞时需要计算的调整u所需的时间
timeHorizon 是未发生碰撞时,需要计算的u所化的时间,他是一种提前预测
2. 添加速度障碍平面
表示一个平面需要法向量和平面上的点

1和2对应代码如下
// 它使用ORCA(Optimal Reciprocal Collision Avoidance)方法来计算智能体之间的避碰行为void Agent::computeNewVelocity(){orcaPlanes_.clear(); // 清空ORCA平面列表const float invTimeHorizon = 1.0f / timeHorizon_; // 计算时间视野的倒数/* 创建智能体的ORCA平面 */for (size_t i = 0; i < agentNeighbors_.size(); ++i){ // 遍历每个邻居智能体const Agent *const other = agentNeighbors_[i].second; // 获取邻居智能体指针//这里的position_是在rvo->updateState添加的当前agent的位置// 改这块就好了===============================const Vector3 relativePosition = other->position_ - position_; // 计算相对位置const Vector3 relativeVelocity = velocity_ - other->velocity_; // 计算相对速度// const Vector3 relativePosition = relative_position_; // 计算相对位置// const Vector3 relativeVelocity = relative_velocity_; // 计算相对速度const float distSq = absSq(relativePosition); // 计算相对位置的平方距离const float combinedRadius = radius_ + other->radius_; // 计算合并半径const float combinedRadiusSq = sqr(combinedRadius); // 计算合并半径的平方Plane plane; // 定义一个平面对象Vector3 u; // 定义速度调整向量if (distSq > combinedRadiusSq){ // 如果没有发生碰撞// w表示给定时间视野TimeHorizon内,两个智能题之间的相对速度偏移量const Vector3 w = relativeVelocity - invTimeHorizon * relativePosition; // 计算从截断中心到相对速度的向量const float wLengthSq = absSq(w); // 计算w向量的平方长度const float dotProduct = w * relativePosition; // 计算w向量和相对位置的点积// 1. 如果投影在截断圆上// dotProduct表示相差的速度和相差的位置的点乘,要是点乘小于0,表示在靠近if (dotProduct < 0.0f && sqr(dotProduct) > combinedRadiusSq * wLengthSq){ const float wLength = std::sqrt(wLengthSq); // 计算w向量的长度const Vector3 unitW = w / wLength; // 计算w向量的单位向量plane.normal = unitW; // 设置平面的法向量u = (combinedRadius * invTimeHorizon - wLength) * unitW; // 计算速度调整向量}// 2. 如果投影在圆锥上else{ const float a = distSq; // 设置系数aconst float b = relativePosition * relativeVelocity; // 设置系数bconst float c = absSq(relativeVelocity) - absSq(cross(relativePosition, relativeVelocity)) / (distSq - combinedRadiusSq); // 设置系数c// t表示圆锥中心线到斜线的距离 对于 半径的倍数const float t = (b + std::sqrt(sqr(b) - a * c)) / a; // 计算t值const Vector3 w = relativeVelocity - t * relativePosition; // 计算w向量const float wLength = abs(w); // 计算w向量的长度const Vector3 unitW = w / wLength; // 计算w向量的单位向量plane.normal = unitW; // 设置平面的法向量u = (combinedRadius * t - wLength) * unitW; // 计算速度调整向量}}// 3. 如果发生碰撞else{ const float invTimeStep = 1.0f / sim_->timeStep_; // 计算时间步长的倒数const Vector3 w = relativeVelocity - invTimeStep * relativePosition; // 计算w向量const float wLength = abs(w); // 计算w向量的长度const Vector3 unitW = w / wLength; // 计算w向量的单位向量plane.normal = unitW; // 设置平面的法向量u = (combinedRadius * invTimeStep - wLength) * unitW; // 计算速度调整向量}// 有多少个neighbor,就有多少个orca平面plane.point = velocity_ + 0.5f * u; // 计算平面上的点orcaPlanes_.push_back(plane); // 将平面添加到ORCA平面列表中}const size_t planeFail = linearProgram3(orcaPlanes_, maxSpeed_, prefVelocity_, false, newVelocity_); // 计算新的速度,如果失败返回失败的平面索引if (planeFail < orcaPlanes_.size()){ // 如果存在失败的平面linearProgram4(orcaPlanes_, planeFail, maxSpeed_, newVelocity_); // 调用备用算法处理失败的平面}}3. 线性规划求解出最优速度
linearProgram几个函数实现了一套线性规划(Linear Programming, LP)求解方法,目的是在有多个平面约束(即避障条件)的情况下找到最优的速度向量,以确保多个智能体不会发生碰撞。
linearProgram1():寻找线与圆形区域的交点
linearProgram2():解决单个平面约束的最优速度
linearProgram3():求解所有平面的初步速度
linearProgram4():处理多个平面之间的约束冲突
相关文章:
ORCA-3D避障算法解析
二维ORCA原理参考: https://zhuanlan.zhihu.com/p/669426124 ORCA原理图解 1. 找到避障速度增量 u 碰撞处理分为三种情况: (1)没有发生碰撞,且相对速度落在小圆里 (2)没有发生碰撞࿰…...

CentOS 7停更官方yum源无法使用,更换阿里源
CentOS 7官方源已经停止维护,导致无法使用yum更新软件。通过尝试使用阿里云、清华大学等第三方源解决,现以阿里云第三方源进行配置: 1、备份原有的yum源配置文件 # cp -a /etc/yum.repos.d /etc/yum.repos.d.bak 2、删除原有的yum源配置文…...

Introduction结构
写好论文的**Introduction(引言)**部分是至关重要的,因为它为读者提供了背景信息,并引导他们进入论文的核心主题。一个优秀的引言应该具备以下几个关键要素: 1. 背景介绍 概述问题:首先,你需要…...

基于SpringBoot实现SpringMvc上传下载功能实现
SpringMvc上传下载功能实现 1.创建新的项目 1)项目信息填写 Spring Initializr (单击选中)Name(填写项目名字)Language(选择开发语言)Type(选择工具Maven)Group()JDK(jdk选择17 &…...

vue 控制组件是否显示
在Vue中,控制组件的显示通常使用v-if、v-else-if、v-else或v-show指令。 1.v-if:条件性地渲染元素,如果条件为假,元素甚至不会被渲染到DOM中。 <template><div><MyComponent v-if"showMyComponent" /&…...

生产部门不给力?精益化生产管理咨询公司为您出谋划策
问题背景 近年来,许多企业的生产部门面临着各种挑战和困难。生产效率低下、产品质量不稳定、生产成本过高等问题频频出现,给企业的发展带来了困扰。面对这一现状,许多企业开始寻求专业的管理咨询公司的帮助,以期能够通过精益生产…...

HTML+CSS - 网页布局之网格布局
1. dispaly设置 display是 CSS 中用于设置元素的显示方式的属性。它决定了元素如何被渲染到页面上。不同的display值会改变元素的显示行为,包括布局、排版以及对其他元素的影响。 其中网格容器是最常用的几种方式之一,在文档中创建类似于网格的效果&…...

基于51单片机的16X16点阵显示屏proteus仿真
地址: https://pan.baidu.com/s/1JQ225NSKweqf1Zlad_f1Mw 提取码:1234 仿真图: 芯片/模块的特点: AT89C52/AT89C51简介: AT89C52/AT89C51是一款经典的8位单片机,是意法半导体(STMicroelectro…...

【目标检测数据集】厨房常见的水果蔬菜调味料数据集4910张39类VOC+YOLO格式
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):4910 标注数量(xml文件个数):4910 标注数量(txt文件个数):4910 标注…...

在Python中统计字符串中每个字符出现的次数
在Python中统计字符串中每个字符出现的次数 在Python编程中,处理字符串是一个常见的任务。统计字符串中每个字符出现的次数不仅能考察候选人的编程能力,还能展示他们对Python内置数据结构和算法的理解。本文将详细介绍如何编写一个函数来统计字符串中每个字符出现的次数,并…...

关于 vue/cli 脚手架实现项目编译运行的源码解析
1.vue项目运行命令解析 在日常开发中,vue 项目通过vue-cli-service脚手架包将项目运行起来,常用的命令例如: npm run serve npm run build 上述执行命令实际一般对应为项目中 package.json 文件的 scripts属性中编写的脚本命令,在…...

C++笔记---继承(上)
1. 继承的简单介绍 1.1 继承的概念 继承(inheritance)机制是面向对象程序设计使代码可以复用的最重要的手段,它允许我们在保持原有类特性的基础上进行扩展,增加方法(成员函数)和属性(成员变量),这样产生新的类,称派生类。 继承呈…...

气膜体育馆:为学校打造智能化运动空间—轻空间
随着教育体制的逐步升级,学校在提升学生综合素质方面的需求日益增长,特别是在体育场地方面。气膜体育馆作为一种新型的运动空间形式,正在迅速成为学校体育设施的优选方案。凭借其快速搭建、节能环保等优势,气膜馆在全国各地的校园…...

JVM 调优篇5 jvm性能监控
一 jvm性能监控 1.1 概述 性能诊断是软件工程师在日常工作中需要经常面对和解决的问题,在用户体验至上的今天,解决好应用的性能问题能带来非常大的收益。 体会1:使用数据说明问题,使用知识分析问题,使用工具处理问…...

一. Unity实现虚拟摇杆及屏幕自适应功能
手游里面很多类型的游戏都需要用到遥感功能,例如王者荣耀,和平精英等,之前的摇杆功能都是用类似于Easy Touch的插件进行开发的,今天不借助任何插件来实现虚拟摇杆的功能。 一般虚拟摇杆的组成都是由轮盘和遥感的点组成,…...

【达梦数据库】mysql 和达梦 tinyint 与 bit 返回值类型差异
测试环境 mysql5.7.44 达梦2024Q2季度版 前言 在mysql 中存在 tinyint(1)的用法来实现存储0 1 作为boolean的标识列;但是在达梦并不允许使用 tinyint(1)来定义列,只能使用 tinyint 即 取值范围为ÿ…...

VUE工程中axios基本使用
安装axios npm install axios -s在main.js中引入 import http from axios Vue.prototype.$http = http将其绑定在VUE的prototype属性中 vue工程目录下,新建config文件夹,在config文件夹下新建index.js export default {...

跨服务器执行PowerShell脚本
本机和远程机都要执行 Enable-PSRemoting -Force 远程端关闭公用网络 Get-NetConnectionProfile Set-NetConnectionProfile -Name "未识别的网络" -NetworkCategory Private 本机和远程机都要执行 winrm quickconfig 将远程机ip加入信任列表 cd WSMan::localhost\…...

linux_L2_linux删除文件
linux 删除文件 在Linux下删除文件有多种实现方法,以下是其中几种常见的方法: 方法一:使用rm命令删除单个文件 rm 文件路径例如,删除当前目录下的文件file.txt: rm file.txtQuestion :当你在Linux系统中使用rm命令删…...
系统架构设计师 - 项目管理
项目管理 项目管理(1-3分,案例分析 25分)立项管理 ★盈亏平衡分析 范围管理 ★★时间管理 ★★★★概述前导图法 PDM(单代号网络图)箭线图法 ADM(双代号网络图) 了解关键路径法总时差自由时差 甘特图 成本管理 ★挣值管理概述指数计算 软件质…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...
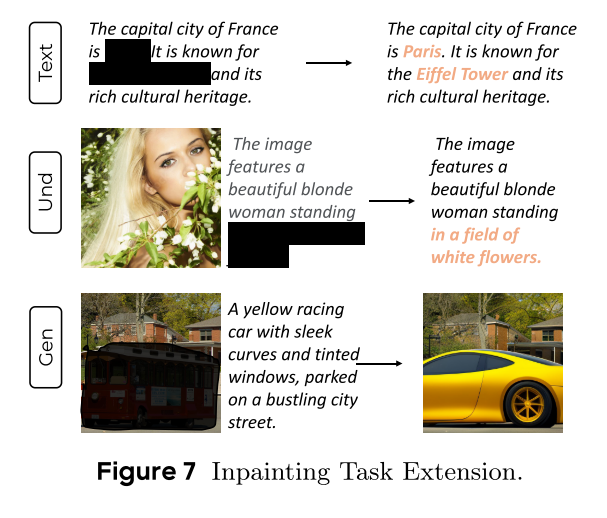
MMaDA: Multimodal Large Diffusion Language Models
CODE : https://github.com/Gen-Verse/MMaDA Abstract 我们介绍了一种新型的多模态扩散基础模型MMaDA,它被设计用于在文本推理、多模态理解和文本到图像生成等不同领域实现卓越的性能。该方法的特点是三个关键创新:(i) MMaDA采用统一的扩散架构…...

Frozen-Flask :将 Flask 应用“冻结”为静态文件
Frozen-Flask 是一个用于将 Flask 应用“冻结”为静态文件的 Python 扩展。它的核心用途是:将一个 Flask Web 应用生成成纯静态 HTML 文件,从而可以部署到静态网站托管服务上,如 GitHub Pages、Netlify 或任何支持静态文件的网站服务器。 &am…...
:爬虫完整流程)
Python爬虫(二):爬虫完整流程
爬虫完整流程详解(7大核心步骤实战技巧) 一、爬虫完整工作流程 以下是爬虫开发的完整流程,我将结合具体技术点和实战经验展开说明: 1. 目标分析与前期准备 网站技术分析: 使用浏览器开发者工具(F12&…...

Java多线程实现之Thread类深度解析
Java多线程实现之Thread类深度解析 一、多线程基础概念1.1 什么是线程1.2 多线程的优势1.3 Java多线程模型 二、Thread类的基本结构与构造函数2.1 Thread类的继承关系2.2 构造函数 三、创建和启动线程3.1 继承Thread类创建线程3.2 实现Runnable接口创建线程 四、Thread类的核心…...

使用Matplotlib创建炫酷的3D散点图:数据可视化的新维度
文章目录 基础实现代码代码解析进阶技巧1. 自定义点的大小和颜色2. 添加图例和样式美化3. 真实数据应用示例实用技巧与注意事项完整示例(带样式)应用场景在数据科学和可视化领域,三维图形能为我们提供更丰富的数据洞察。本文将手把手教你如何使用Python的Matplotlib库创建引…...
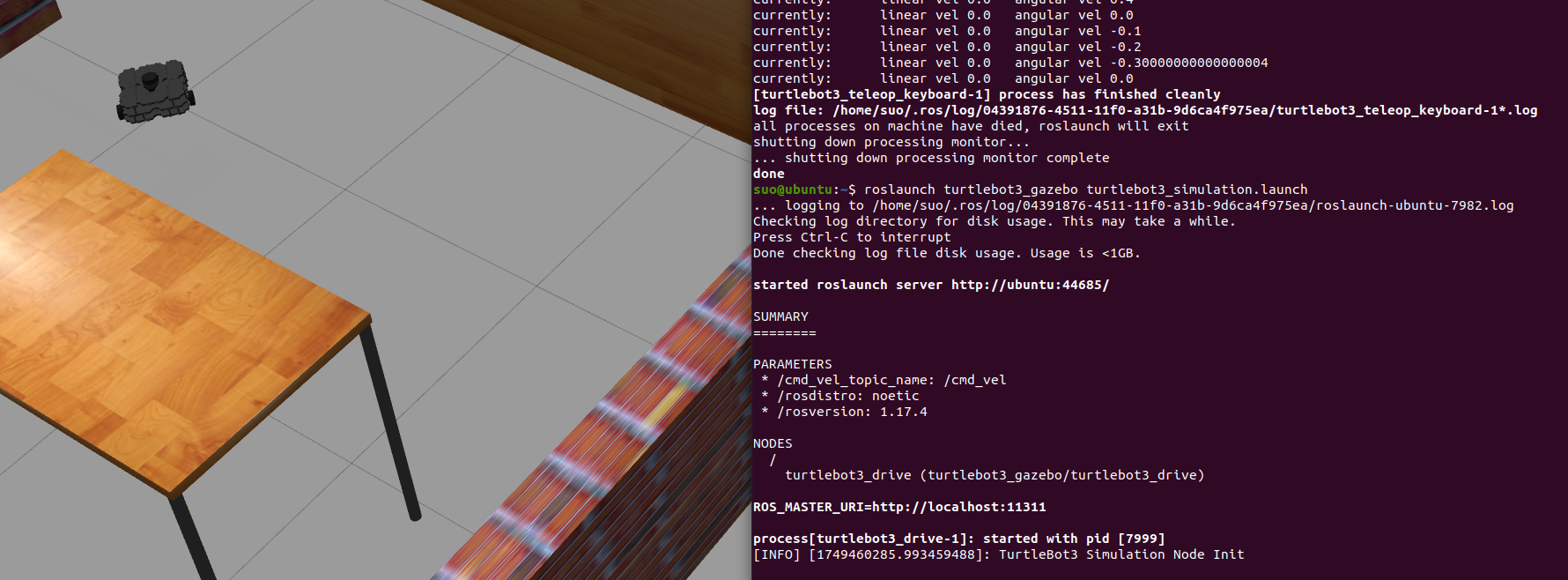
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...
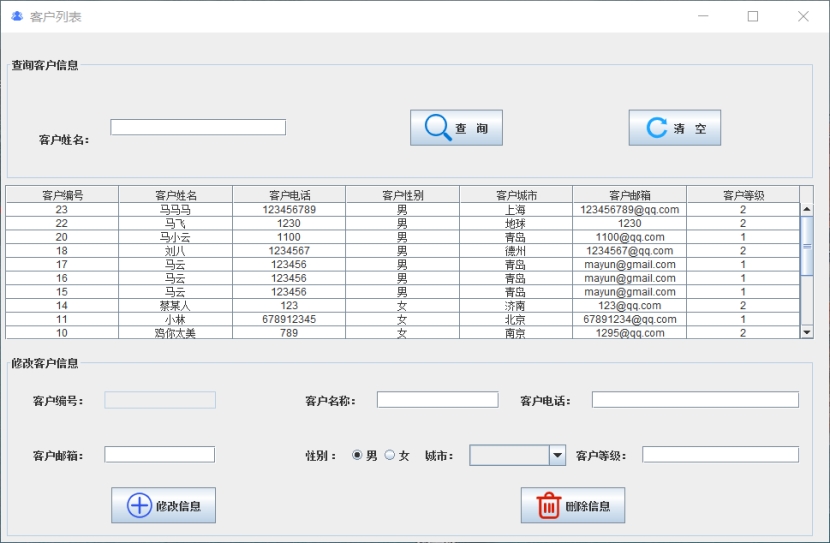
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...

IP如何挑?2025年海外专线IP如何购买?
你花了时间和预算买了IP,结果IP质量不佳,项目效率低下不说,还可能带来莫名的网络问题,是不是太闹心了?尤其是在面对海外专线IP时,到底怎么才能买到适合自己的呢?所以,挑IP绝对是个技…...