完整网络模型训练(一)
文章目录
- 一、网络模型的搭建
- 二、网络模型正确性检验
- 三、创建网络函数
一、网络模型的搭建
以CIFAR10数据集作为训练例子
准备数据集:
#因为CIFAR10是属于PRL的数据集,所以需要转化成tensor数据集
train_data = torchvision.datasets.CIFAR10(root="./data", train=True, transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10(root="./data", train=False, transform=torchvision.transforms.ToTensor(),download=True)
查看数据集的长度:
train_data_size = len(train_data)
test_data_size = len(test_data)
print(f"训练数据集的长度为{train_data_size}")
print(f"测试数据集的长度为{test_data_size}")
运行结果:

利用DataLoader来加载数据集:
train_dataloader = DataLoader(train_data,batch_size=64)
test_dataloader = DataLoader(test_data,batch_size=64)
搭建CIFAR10数据集神经网络:

卷积层【1】代码解释:
#第一个数字3表示inputs(可以看到图中为3),第二个数字32表示outputs(图中为32)
#第三个数字5为卷积核(图中为5),第四个数字1表示步长(stride)
#第五个数字表示padding,需要计算,计算公式:

nn.Conv2d(3, 32, 5, 1, 2)
最大池化代码解释:
#数字2表示kernel卷积核
nn.MaxPool2d(2)
读图
卷积层【1】的Inputs 和 Outputs是下图这两个:

最大池化【1】的Inputs 和 Outputs是下图这两个:

卷积层【2】的Inputs 和 Outputs是下图这两个:

以此类推
展平:

Flatten后它会变成64*4 *4的一个结果
线性输出:

线性输入是64*4 *4,线性输出是64,故如下代码
nn.LInear(64 *4 *4,64)
继续线性输出

nn.LInear(64,10)
搭建网络完整代码:
class Sen(nn.Module):def __init__(self):super(Sen, self).__init__()self.model = nn.Sequential(nn.Conv2d(3, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, 1 ,2),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, 1, 2),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(64*4*4, 64),nn.Linear(64, 10))def forward(self,x):x = self.model(x)return x
二、网络模型正确性检验
if __name__ == '__main__':sen = Sen()input = torch.ones((64, 3, 32, 32))output = sen(input)print(output.shape)
注释:
input = torch.ones((64, 3, 32, 32))
这一行代码的含义是:创建一个大小为 (64, 3, 32, 32) 的全 1 张量,数据类型为 torch.float32。
64:这是批次大小,代表输入有 64 张图片。
3:这是图片的通道数,通常为 RGB 图像的三个通道 (红、绿、蓝)。
32, 32:这是图片的高和宽,表示每张图片的尺寸为 32x32 像素。
torch.ones 函数用于生成一个全 1 的张量,这里的张量形状适合用于输入图像分类或卷积神经网络(CNN)中常见的 CIFAR-10 或类似的 32x32 像素图像数据。
运行结果:

可以得到成功变成了【64, 10】的结果。
三、创建网络函数
创建网络模型:
sen = Sen()
搭建损失函数:
loss_fn = nn.CrossEntropyLoss()
优化器:
learning_rate = 1e-2
optimizer = torch.optim.SGD(sen.parameters(), lr=learning_rate)
优化器注释:
使用随机梯度下降(SGD)优化器
learning_rate = 1e-2 这里的1e-2代表的是:1 x (10)^(-2) = 1/100 = 0.01
记录训练的次数:
total_train_step = 0
记录测试的次数:
total_test_step = 0
训练的轮数:
epoch= 10
进行循环训练:
for i in range(epoch):print(f"第{i+1}轮训练开始")for data in train_dataloader:imgs, targets = dataoutputs = sen(imgs)loss = loss_fn(outputs, targets)optimizer.zero_grad()loss.backward()optimizer.step()total_train_step = total_train_step + 1print(f"训练次数:{total_train_step},Loss:{loss.item()}")
注释:
imgs, targets = data是解包数据,imgs 是输入图像,targets 是目标标签(真实值)
outputs = sen(imgs)将输入图像传入模型 ‘sen’,得到模型的预测输出 outputs
loss = loss_fn(outputs, targets)计算损失值(Loss),loss_fn 是损失函数,它比较outputs的值与targets 是目标标签(真实值)的误差
optimizer.zero_grad()清除优化器中上一次计算的梯度,以免梯度累积
loss.backward()反向传播,计算损失相对于模型参数的梯度
optimizer.step()使用优化器更新模型的参数,以最小化损失
loss.item() 将张量转换为 Python 的数值
loss.item演示:
import torch
a = torch.tensor(5)
print(a)
print(a.item())
运行结果:

因此可以得到:item的作用是将tensor变成真实数字5
本章节完整代码展示:
import torchvision.datasets
from torch import nn
from torch.utils.data import DataLoaderclass Sen(nn.Module):def __init__(self):super(Sen, self).__init__()self.model = nn.Sequential(nn.Conv2d(3, 32, 5, 1, 2),nn.MaxPool2d(2),nn.Conv2d(32, 32, 5, 1 ,2),nn.MaxPool2d(2),nn.Conv2d(32, 64, 5, 1, 2),nn.MaxPool2d(2),nn.Flatten(),nn.Linear(64*4*4, 64),nn.Linear(64, 10))def forward(self,x):x = self.model(x)return x
#准备数据集
#因为CIFAR10是属于PRL的数据集,所以需要转化成tensor数据集
train_data = torchvision.datasets.CIFAR10(root="./data", train=True, transform=torchvision.transforms.ToTensor(),download=True)
test_data = torchvision.datasets.CIFAR10(root="./data", train=False, transform=torchvision.transforms.ToTensor(),download=True)#length长度
train_data_size = len(train_data)
test_data_size = len(test_data)
print(f"训练数据集的长度为{train_data_size}")
print(f"测试数据集的长度为{test_data_size}")train_dataloader = DataLoader(train_data,batch_size=64)
test_dataloader = DataLoader(test_data,batch_size=64)sen = Sen()#损失函数
loss_fn = nn.CrossEntropyLoss()#优化器
learning_rate = 1e-2
optimizer = torch.optim.SGD(sen.parameters(), lr=learning_rate)#记录训练的次数
total_train_step = 0
#记录测试的次数
total_test_step = 0
#训练的轮数
epoch= 10for i in range(epoch):print(f"第{i+1}轮训练开始")for data in train_dataloader:imgs, targets = dataoutputs = sen(imgs)loss = loss_fn(outputs, targets)optimizer.zero_grad()loss.backward()optimizer.step()total_train_step = total_train_step + 1print(f"训练次数:{total_train_step},Loss:{loss.item()}")
运行结果:

可以看到训练的损失函数在一直进行修正。
相关文章:
完整网络模型训练(一)
文章目录 一、网络模型的搭建二、网络模型正确性检验三、创建网络函数 一、网络模型的搭建 以CIFAR10数据集作为训练例子 准备数据集: #因为CIFAR10是属于PRL的数据集,所以需要转化成tensor数据集 train_data torchvision.datasets.CIFAR10(root&quo…...

高效便捷,体验不一样的韩语翻译神器
嘿,大家好啊!今天想跟大家聊聊我用过的几款翻译神器,特别是它们在翻译韩语时的那些小感受。作为一个偶尔需要啃啃韩语资料或者跟韩国朋友聊天的普通人,我真心觉得这些翻译工具简直就是我的救星! 一、福昕在线翻译 网址…...
Markdown笔记管理工具Haptic
什么是 Haptic ? Haptic 是一个新的本地优先、注重隐私的开源 Markdown 笔记管理工具。它简约、轻量、高效,旨在提供您所需的一切,而不包含多余的功能。 目前官方提供了 docker 和 Mac 客户端。 Haptic 仍在积极开发中。以下是未来计划的一些…...

网络原理-传输层UDP
上集回顾: 上一篇博客中讲述了应用层如何自定义协议:确定传输信息,确定数据格式 应用层也有一些现成的协议:HTTP协议 这一篇博客中来讲述传输层协议 传输层 socket api都是传输层协议提供的(操作系统内核实现的了…...

C++中,如何使你设计的迭代器被标准算法库所支持。
iterator(读写迭代器) const_iterator(只读迭代器) reverse_iterator(反向读写迭代器) const_reverse_iterator(反向只读迭代器) 以经常介绍的_DList类为例,它的迭代…...

Java NIO 全面详解:掌握 `Path` 和 `Files` 的一切
在 Java 7 中引入的 NIO (New I/O) 为文件系统和流的操作带来了强大的能力,其中 Path 和 Files 是核心部分。Path 作为对文件路径的抽象,提供了灵活的方式处理文件系统中的路径;Files 则通过一系列静态方法,使得文件的读写、复制、…...

bluez免提协议hands-free介绍,全到无法想象,bluez hfp ag介绍
零. 前言 由于Bluez的介绍文档有限,以及对Linux 系统/驱动概念、D-Bus 通信和蓝牙协议都有要求,加上网络上其实没有一个完整的介绍Bluez系列的文档,所以不管是蓝牙初学者还是蓝牙从业人员,都有不小的难度,学习曲线也相对较陡,所以我有了这个想法,专门对Bluez做一个系统…...
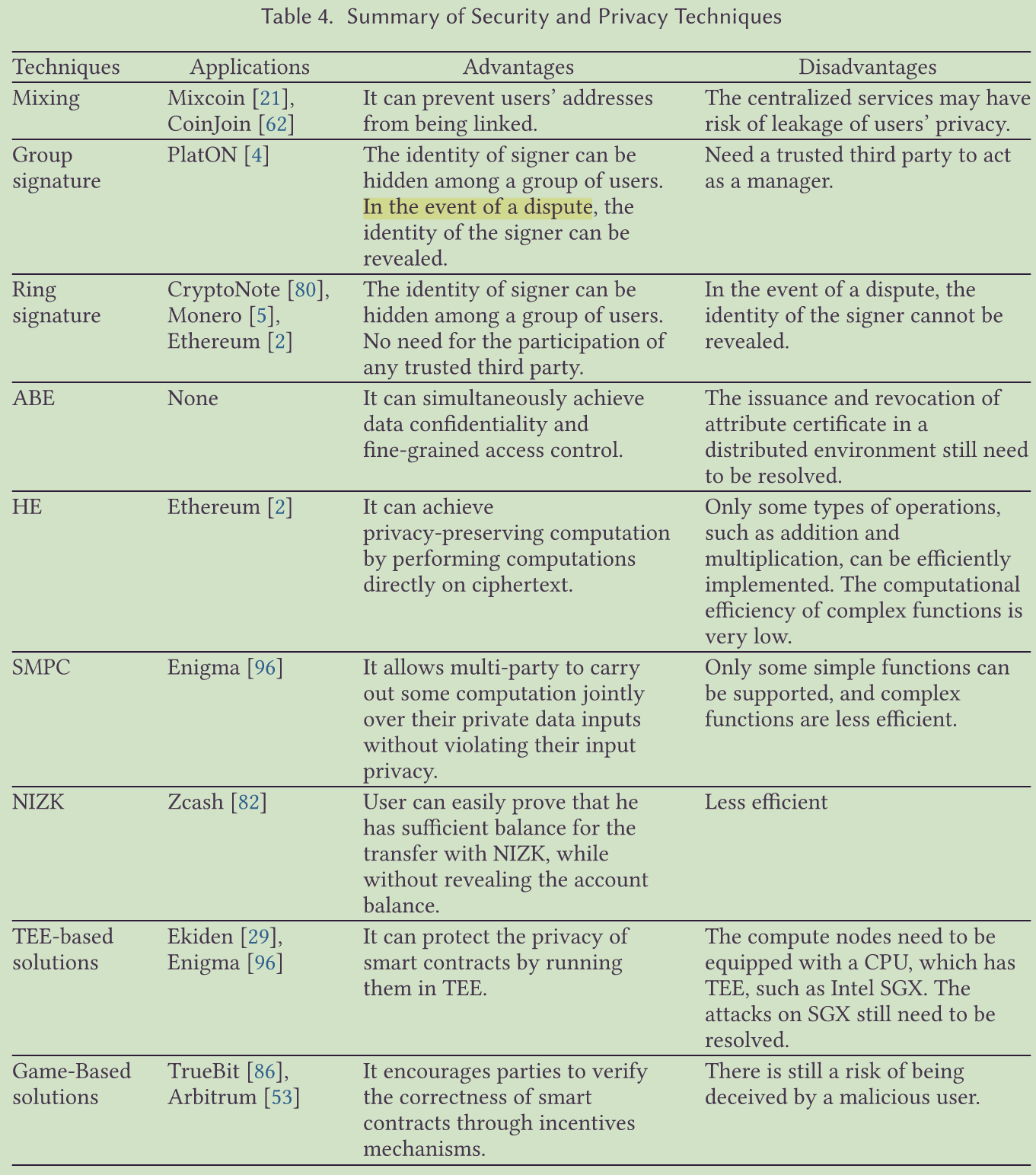
关于区块链的安全和隐私
背景 区块链技术在近年来发展迅速,被认为是安全计算的突破,但其安全和隐私问题在不同应用中的部署仍处于争论焦点。 目的 对区块链的安全和隐私进行全面综述,帮助读者深入了解区块链的相关概念、属性、技术和系统。 结构 首先介绍区块链…...

特征工程——一门提高机器学习性能的艺术
当前围绕人工智能(AI)和机器学习(ML)展开的许多讨论以模型为中心,聚焦于 ML和深度学习(DL)的最新进展。这种模型优先的方法往往对用于训练这些模型的数据关注不足,甚至完全忽视。类似MLOps的领域正迅速发展,通过系统性地训练和利用ML模型&…...
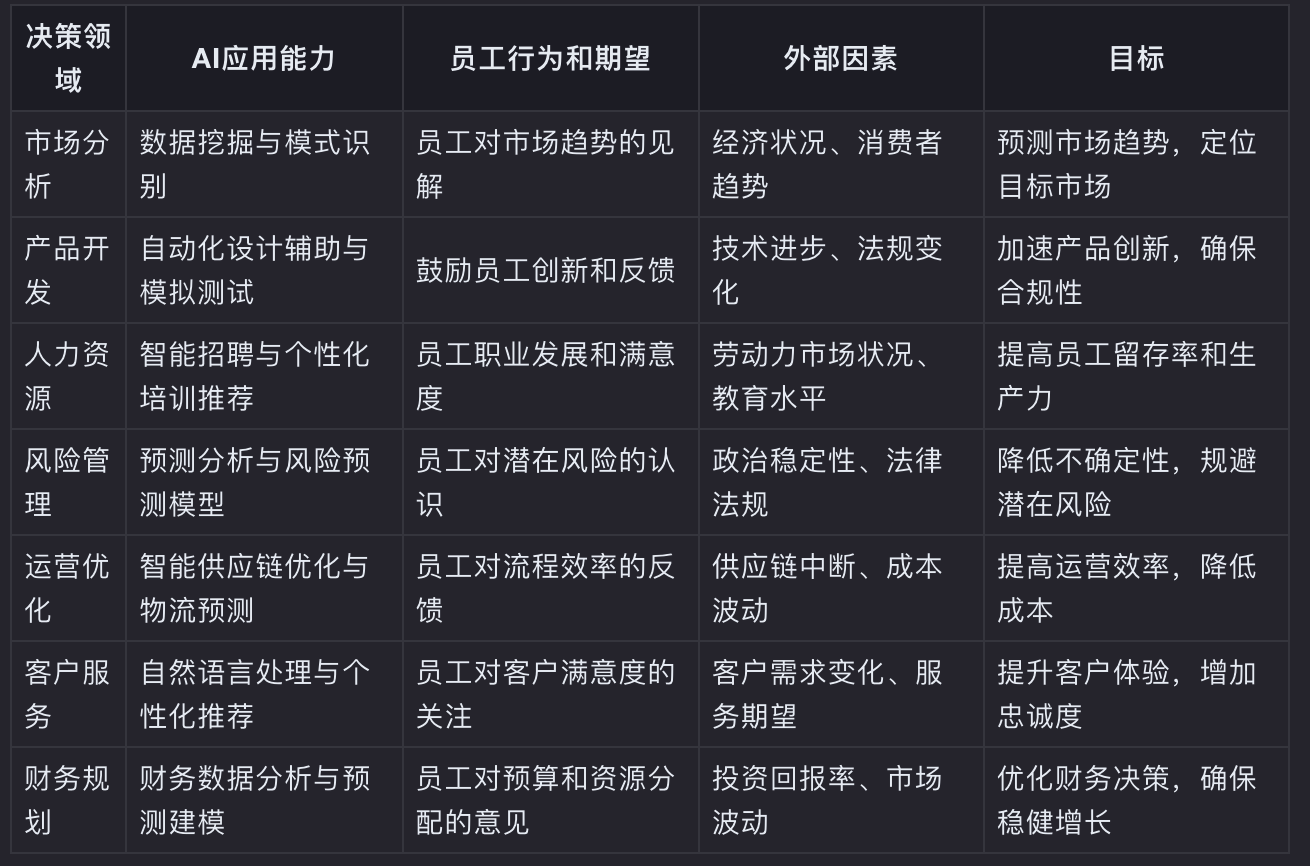
Paper解读:工作场所人机协作的团队形成:促进组织变革的目标编程模型
人工智能(AI)具有降低运营成本、提高效率和改善客户体验的潜力。 因此,在组织中组建项目团队至关重要,这样他们就会在决策过程中欢迎人工智能。 当前的技术革命要求公司快速变革,并增加了对团队在促进创新采用方面的作…...

图文深入理解Oracle Network配置管理(一)
List item 本篇图文深入介绍Oracle Network配置管理。 Oracle Network概述 Oracle Net 服务 Oracle Net 监听程序 <oracle_home>/network/admin/listener.ora <oracle_home>/network/admin/sqlnet.ora建立网络连接 要建立客户机或中间层连接,Oracle…...

leetcode-链表篇3
leetcode-61 给你一个链表的头节点 head ,旋转链表,将链表每个节点向右移动 k 个位置。 示例 1: 输入:head [1,2,3,4,5], k 2 输出:[4,5,1,2,3]示例 2: 输入:head [0,1,2], k 4 输出&#x…...

RAG(Retrieval Augmented Generation)及衍生框架:CRAG、Self-RAG与HyDe的深入探讨
近年来,随着大型语言模型(LLMs)的迅猛发展,我们在寻求更精确、更可靠的语言生成能力上取得了显著进展。其中,检索增强生成(Retrieval-Augmented Generation)作为一种创新方法,极大地…...
C语言介绍
什么是C语言 C programing language 能干什么 Hello world? 如何学C语言 no reading no learning...

损失函数篇 | YOLOv10 更换损失函数之 MPDIoU | 《2023 一种用于高效准确的边界框回归的损失函数》
论文地址:https://arxiv.org/pdf/2307.07662v1.pdf 边界框回归(Bounding Box Regression,BBR)在目标检测和实例分割中得到了广泛应用,是目标定位的重要步骤。然而,对于边界框回归的大多数现有损失函数来说,当预测的边界框与真值边界框具有相同的长宽比,但宽度和高度的…...

WMware安装WMware Tools(Linux~Ubuntu)
1、这里终端里面输入sudo apt upgrade用于更新最新的包 sudo apt upgrade 2、安装 open-vm-tools-desktop 包, Ps:这里是以为我已经安装好了。 udo apt install open-vm-tools-desktop -y3、最后重启就大功告成了 reboot 4、测试是否成功:…...
关键帧跟踪)
SLAM ORB-SLAM2(30)关键帧跟踪
SLAM ORB-SLAM2(30)关键帧跟踪 1. 关键帧跟踪2. TrackReferenceKeyFrame2.1. 将当前普通帧的描述子转化为BoW向量2.2. 通过词袋BoW加速当前帧与参考帧之间的特征点匹配2.3. 将上一帧的位姿态作为当前帧位姿的初始值2.4. 通过优化3D-2D的重投影误差来获得位姿2.5. 剔除优化后的…...

k8s 部署 prometheus
创建namespace prometheus-namespace.yaml apiVersion: v1 kind: Namespace metadata:name: ns-prometheus拉取镜像 docker pull swr.cn-north-4.myhuaweicloud.com/ddn-k8s/quay.io/prometheus/prometheus:v2.54.0prometheus配置文件configmap prometheus-configmap.yaml …...
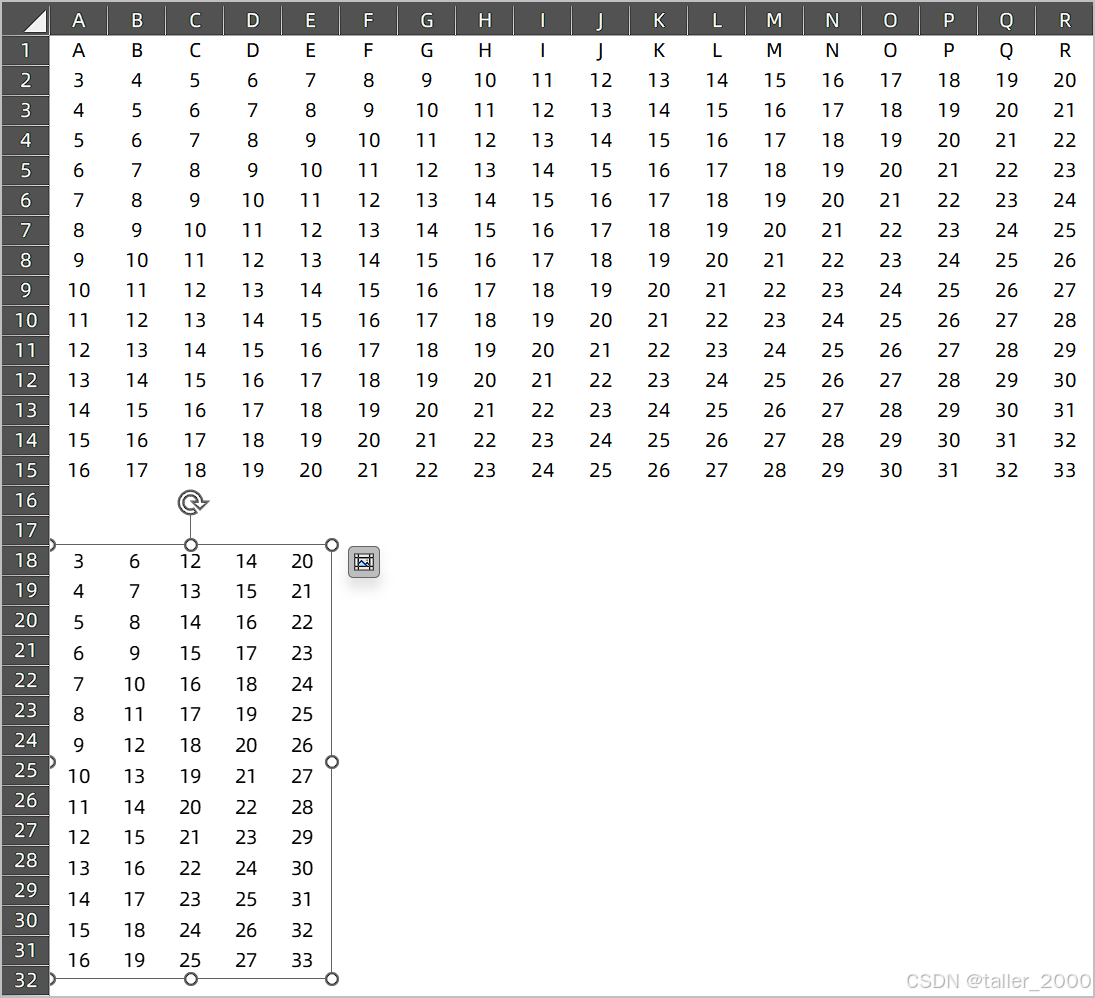
使用VBA快速生成Excel工作表非连续列图片快照
Excel中示例数据如下图所示。 现在需要拷贝A2:A15,D2:D15,J2:J15,L2:L15,R2:R15为图片,然后粘贴到A18单元格,如下图所示。 大家都知道VBA中Range对象有CopyPicture方法可以拷贝为图片,但是如果Range对象为非连续区域,那么将产生10…...

解决GitHub下载速度慢
解决GitHub下载速度慢 方法一:使用git clone 地址 --depth 1来下载 depth 1 表示只科隆最新的一次提交,也就是默认主分支,而不是完整地克隆整个代码仓库,这样可以减少下载地数据,加快克隆操作 可以用git clone 地址 …...
网络六边形受到攻击
大家读完觉得有帮助记得关注和点赞!!! 抽象 现代智能交通系统 (ITS) 的一个关键要求是能够以安全、可靠和匿名的方式从互联车辆和移动设备收集地理参考数据。Nexagon 协议建立在 IETF 定位器/ID 分离协议 (…...

ubuntu搭建nfs服务centos挂载访问
在Ubuntu上设置NFS服务器 在Ubuntu上,你可以使用apt包管理器来安装NFS服务器。打开终端并运行: sudo apt update sudo apt install nfs-kernel-server创建共享目录 创建一个目录用于共享,例如/shared: sudo mkdir /shared sud…...

Cesium1.95中高性能加载1500个点
一、基本方式: 图标使用.png比.svg性能要好 <template><div id"cesiumContainer"></div><div class"toolbar"><button id"resetButton">重新生成点</button><span id"countDisplay&qu…...
微信小程序 - 手机震动
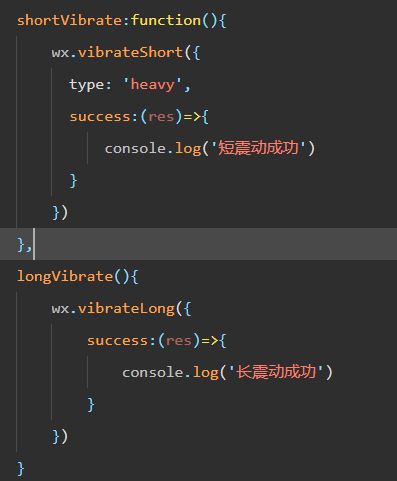
一、界面 <button type"primary" bindtap"shortVibrate">短震动</button> <button type"primary" bindtap"longVibrate">长震动</button> 二、js逻辑代码 注:文档 https://developers.weixin.qq…...

Spring AI 入门:Java 开发者的生成式 AI 实践之路
一、Spring AI 简介 在人工智能技术快速迭代的今天,Spring AI 作为 Spring 生态系统的新生力量,正在成为 Java 开发者拥抱生成式 AI 的最佳选择。该框架通过模块化设计实现了与主流 AI 服务(如 OpenAI、Anthropic)的无缝对接&…...

学习STC51单片机32(芯片为STC89C52RCRC)OLED显示屏2
每日一言 今天的每一份坚持,都是在为未来积攒底气。 案例:OLED显示一个A 这边观察到一个点,怎么雪花了就是都是乱七八糟的占满了屏幕。。 解释 : 如果代码里信号切换太快(比如 SDA 刚变,SCL 立刻变&#…...
Mobile ALOHA全身模仿学习
一、题目 Mobile ALOHA:通过低成本全身远程操作学习双手移动操作 传统模仿学习(Imitation Learning)缺点:聚焦与桌面操作,缺乏通用任务所需的移动性和灵活性 本论文优点:(1)在ALOHA…...

《Offer来了:Java面试核心知识点精讲》大纲
文章目录 一、《Offer来了:Java面试核心知识点精讲》的典型大纲框架Java基础并发编程JVM原理数据库与缓存分布式架构系统设计二、《Offer来了:Java面试核心知识点精讲(原理篇)》技术文章大纲核心主题:Java基础原理与面试高频考点Java虚拟机(JVM)原理Java并发编程原理Jav…...

Django RBAC项目后端实战 - 03 DRF权限控制实现
项目背景 在上一篇文章中,我们完成了JWT认证系统的集成。本篇文章将实现基于Redis的RBAC权限控制系统,为系统提供细粒度的权限控制。 开发目标 实现基于Redis的权限缓存机制开发DRF权限控制类实现权限管理API配置权限白名单 前置配置 在开始开发权限…...

Java中栈的多种实现类详解
Java中栈的多种实现类详解:Stack、LinkedList与ArrayDeque全方位对比 前言一、Stack类——Java最早的栈实现1.1 Stack类简介1.2 常用方法1.3 优缺点分析 二、LinkedList类——灵活的双端链表2.1 LinkedList类简介2.2 常用方法2.3 优缺点分析 三、ArrayDeque类——高…...