自动驾驶系列—激光雷达点云数据在自动驾驶场景中的深度应用
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中一起航行,共同成长,探索技术的无限可能。
🚀 探索专栏:学步_技术的首页 —— 持续学习,不断进步,让学习成为我们共同的习惯,让总结成为我们前进的动力。
🔍 技术导航:
- 人工智能:深入探讨人工智能领域核心技术。
- 自动驾驶:分享自动驾驶领域核心技术和实战经验。
- 环境配置:分享Linux环境下相关技术领域环境配置所遇到的问题解决经验。
- 图像生成:分享图像生成领域核心技术和实战经验。
- 虚拟现实技术:分享虚拟现实技术领域核心技术和实战经验。
🌈 非常期待在这个数字世界里与您相遇,一起学习、探讨、成长。不要忘了订阅本专栏,让我们的技术之旅不再孤单!
💖💖💖 ✨✨ 欢迎关注和订阅,一起开启技术探索之旅! ✨✨
文章目录
- 1. 背景介绍
- 2. 数据格式和预处理
- 2.1 激光点云数据格式
- 2.2 点云数据预处理
- 3. 质量评估
- 4. 算法应用
- 5. 应用场景
- 6. 代码实现
- 7. 总结与讨论
1. 背景介绍
随着自动驾驶技术的飞速发展,车辆传感器技术日益成为行业的核心。激光雷达(LiDAR)作为其中重要的一环,通过激光点云数据为自动驾驶车辆提供高精度的环境感知能力。激光雷达通过发射激光并测量其反射时间来获取周围物体的距离和形状,生成的三维点云数据可以用于物体检测、障碍物避让、地图构建等多个领域。与摄像头、毫米波雷达等传感器相比,激光雷达能够提供更为精确的三维空间信息,尤其在复杂场景和恶劣天气下表现优异。

2. 数据格式和预处理
2.1 激光点云数据格式
激光雷达产生的点云数据是一组三维空间点的集合,通常以 (x, y, z) 的形式表示。每个点代表了激光雷达发射出的激光束与环境物体交互后,反射回接收器的点。常见的点云数据格式包括:
- PCD(Point Cloud Data):PCD是由点云库(PCL)定义的标准格式,广泛用于研究与应用。
- PLY(Polygon File Format):PLY是一种描述三维对象的文件格式,支持文本和二进制存储。
- LAS:主要用于地理信息系统(GIS)的点云数据存储。
2.2 点云数据预处理
由于激光雷达采集的数据量庞大且复杂,预处理步骤是后续应用的关键。常见的预处理操作包括:
-
去噪:激光点云数据可能包含许多噪声点(如由于反射不佳或外部干扰造成的误差点),可以通过滤波技术去除这些噪声点。
- 常用方法:统计滤波、半径滤波、体素滤波。
-
降采样:为了减少计算负担,可以对点云进行降采样。通过将临近的点合并,保持整体形状的同时降低点云的密度。
- 常用方法:体素栅格化(Voxel Grid)降采样。
-
坐标系转换:点云数据通常是相对于激光雷达坐标系的,预处理时需要将其转换为全局坐标系,以方便后续的感知和决策。
-
地面分割:在自动驾驶场景中,准确区分地面和非地面点是基础步骤。地面分割算法可以过滤掉道路或地面的点,提高障碍物检测的精度。
3. 质量评估
激光点云数据的质量直接影响自动驾驶系统的感知和决策。评估点云质量的常见指标包括:
-
点云密度:点云密度直接影响感知的精度。密度越高,激光雷达捕获的物体细节越丰富。密度不足可能导致物体轮廓模糊或细节丢失。
-
反射强度:激光点云中的每个点通常伴随有反射强度信息,用于评估物体的材质和表面特性。强度信息可以帮助识别不同的物体类型,例如区分金属物体和非金属物体。
-
遮挡问题:在实际驾驶场景中,遮挡问题不可避免。某些物体可能会遮挡激光雷达的视线,导致点云数据缺失。为了解决遮挡问题,可以结合多传感器融合或采用多激光雷达系统。
-
噪声水平:高质量的点云数据应尽量减少噪声点。通过滤波技术和数据清理,可以提高数据的可用性。
4. 算法应用
激光点云数据在自动驾驶中有广泛的应用,主要体现在以下几个方面:
-
三维物体检测:通过点云数据中的高度、轮廓和形状信息,自动驾驶系统能够检测并识别出行人、车辆、道路设施等目标。常见的三维物体检测算法包括基于卷积神经网络(CNN)的方法,如PointNet、SECOND等。
-
场景分割:激光雷达点云场景分割技术用于将点云数据划分为不同的语义区域,如道路、建筑物、行人和车辆等。场景分割能够帮助车辆更好地理解周围环境,做出合理的决策。
-
障碍物检测与避障:通过分析激光雷达数据,可以实时检测到车辆前方的障碍物,并为车辆规划安全的避障路径。这对于城市道路中应对静态和动态障碍物尤为关键。
-
高精地图构建:激光雷达可以生成高精度的三维地图,帮助自动驾驶车辆实现厘米级的定位精度。常见的地图构建算法有SLAM(同步定位与地图构建)技术,包括LOAM、Cartographer等。
-
路径规划与环境建模:通过点云数据,自动驾驶系统可以对当前环境进行建模,生成三维场景图,用于车辆的路径规划和决策。
5. 应用场景
激光点云数据在自动驾驶车辆中的应用极为广泛,以下是几个典型的应用场景:
-
城市道路驾驶:激光雷达在复杂的城市环境中具有出色的感知能力,能够帮助自动驾驶车辆检测周围的车辆、行人和交通信号灯等目标,实现智能化的路径规划和障碍物规避。
-
高速公路驾驶:在高速公路场景中,激光雷达能够精确检测车辆前方的障碍物、护栏等静态物体,并为车辆提供车道信息,支持自适应巡航和车道保持等功能。
-
恶劣天气条件下的驾驶:激光雷达在雨雾、夜间等复杂条件下的表现优于摄像头系统,能够持续提供高质量的三维感知数据,确保车辆安全行驶。
-
自动泊车:激光雷达点云数据被广泛应用于自动泊车系统中,通过检测车位的尺寸和位置,帮助车辆实现精准泊车。
6. 代码实现
import open3d as o3d
import numpy as np# 加载点云数据
def load_point_cloud(file_path):# 读取 PCD 文件pcd = o3d.io.read_point_cloud(file_path)print("点云数据加载完成,点数:", len(pcd.points))return pcd# 点云降采样
def downsample_point_cloud(pcd, voxel_size=0.05):print("原始点数:", len(pcd.points))downsampled_pcd = pcd.voxel_down_sample(voxel_size=voxel_size)print("降采样后点数:", len(downsampled_pcd.points))return downsampled_pcd# 点云去噪(统计滤波)
def remove_noise(pcd, nb_neighbors=20, std_ratio=2.0):print("进行去噪处理...")cl, ind = pcd.remove_statistical_outlier(nb_neighbors=nb_neighbors, std_ratio=std_ratio)filtered_pcd = pcd.select_by_index(ind)print("去噪后点数:", len(filtered_pcd.points))return filtered_pcd# 点云可视化
def visualize_point_cloud(pcd):o3d.visualization.draw_geometries([pcd], window_name="Point Cloud", width=800, height=600)if __name__ == "__main__":# 加载点云文件,PCD 格式文件file_path = "your_point_cloud.pcd"pcd = load_point_cloud(file_path)# 可视化原始点云visualize_point_cloud(pcd)# 降采样点云downsampled_pcd = downsample_point_cloud(pcd)visualize_point_cloud(downsampled_pcd)# 去噪处理denoised_pcd = remove_noise(downsampled_pcd)visualize_point_cloud(denoised_pcd)
7. 总结与讨论
激光点云数据作为自动驾驶车辆的重要感知数据源之一,凭借其高精度、高鲁棒性在自动驾驶领域中发挥了至关重要的作用。通过点云数据,自动驾驶系统可以精确感知三维环境中的物体信息,从而实现自动驾驶的路径规划、环境理解和决策。
随着激光雷达技术的不断发展,点云数据的质量和处理效率也在逐步提升。然而,激光雷达系统的成本和复杂性依然是大规模商用的主要挑战之一。未来,随着点云处理算法的优化以及硬件成本的降低,激光雷达在自动驾驶中的应用前景将更加广阔。
🌟 在这篇博文的旅程中,感谢您的陪伴与阅读。如果内容对您有所启发或帮助,请不要吝啬您的点赞 👍🏻,这是对我最大的鼓励和支持。
📚 本人虽致力于提供准确且深入的技术分享,但学识有限,难免会有疏漏之处。如有不足或错误,恳请各位业界同仁在评论区留下宝贵意见,您的批评指正是我不断进步的动力!😄😄😄
💖💖💖 如果您发现这篇博文对您的研究或工作有所裨益,请不吝点赞、收藏,或分享给更多需要的朋友,让知识的力量传播得更远。
🔥🔥🔥 “Stay Hungry, Stay Foolish” —— 求知的道路永无止境,让我们保持渴望与初心,面对挑战,勇往直前。无论前路多么漫长,只要我们坚持不懈,终将抵达目的地。🌙🌙🌙
👋🏻 在此,我也邀请您加入我的技术交流社区,共同探讨、学习和成长。让我们携手并进,共创辉煌!
相关文章:

自动驾驶系列—激光雷达点云数据在自动驾驶场景中的深度应用
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中…...

C#删除dataGridView 选中行
关键在于:从最后一行开始删除。 从前往后删只能删除其中一半,我理解是再remove行的时候dataGridView内部行序列发生了变化,包含在选中行中的特定行会被忽略,从后往前删就可避免这个问题,最后一行的行号影响不到前面的…...

K8S调度不平衡问题分析过程和解决方案
不平衡问题排查 问题描述: 1、业务部署大量pod(据反馈,基本为任务型进程)过程中,k8s node内存使用率表现不均衡,范围从80%到百分之几; 2、单个node内存使用率超过95%,仍未发生pod驱逐,存在node…...

Python中类、继承和方法重写的使用
😀前言 本篇博文将介绍如何定义类、创建类的实例、访问类的成员、使用属性、实现继承及方法重写,希望你能够喜欢 🏠个人主页:晨犀主页 🧑个人简介:大家好,我是晨犀,希望我的文章可以…...

【Neo4j】- 轻松入门图数据库
文章目录 前言-场景一、Neo4j概述二、软件安装部署1.软件下载2.软件部署3.软件使用4.语法学习 总结 前言-场景 这里用大家都了解的关系数据与图数据据库对比着说,更加方便大家理解图数据库的作用 图形数据库和关系数据库均存储信息并表示数据之间的关系。但是,关系…...

LeetCode 206 - 反转链表
解题思路 我们可以使用迭代的方法来实现链表的反转,这里我们先介绍迭代的方法。迭代的思路是:从头节点开始,依次将节点的next指针进行反转,使得当前节点的next指向其前一个节点,然后依次向后移动指针,直至…...

AI生成大片,Movie Gen 可以生成长视频并配上完美的音效,带给观众更好的观看体验。
之前的文章中已经给大家介绍了一些关于长视频生成相关的技术,AI生成大片已经越来越近了。感兴趣的小伙伴可以点击下面链接阅读~ Movie Gen 的工作原理可以简单理解为两个主要部分:一个是生成视频的模型,另一个是生成音频的模型。首先&#x…...

Flink on yarn模式下,JobManager异常退出问题
这个问题排除了很久,其中更换了Flink版本,也更换了Hadoop版本一直无法解决,JobManager跑着跑着就异常退出了。资源管理器上是提示运行结束,运行状态是被Kill掉。 网上搜了一圈,都说内存不足、资源不足,配置…...

面对AI算力需求激增,如何守护数据中心机房安全?
随着人工智能(AI)技术飞速发展,AI算力需求呈现爆发式增长,导致对数据设备电力的需求指数级攀升。这给数据中心带来前所未有的挑战和机遇,从提供稳定的电力供应、优化高密度的部署,到数据安全的隐私保护&…...

Connection --- 连接管理模块
目录 模块设计 模块实现 shared_from_this 模块测试纠错 模块设计 Connection模块是对通信连接也就是通信套接字的整体的管理模块,对连接的所有操作都是通过这个模块提供的接口来完成的。 那么他具体要进行哪些方面的管理呢? 首先每个通信连接都需…...

iconfont图标放置在某个元素的最右边
在网页设计中,如果你想要将iconfont图标放置在某个元素的最右边,你可以通过CSS来实现这个布局。以下是一些基本的CSS代码示例,它们可以帮助你根据不同的布局需求将图标放置在最右边: 内联元素(如<span>ÿ…...

Android10 recent键相关总结
目录 初始化流程 点击Recent键流程 RecentsActivity 显示流程 RecentsModel 获取数据管理类 RecentsActivity 布局 已处于Recent界面时 点击recent 空白区域 点击返回键 recent组件配置 Android10 Recent 功能由 System UI,Launcher共同实现。 初始化流程 …...

Ajax:原生ajax、使用FormData的细节问题,数据的载体
人生海海,山山而川,不过尔尔;空空而来,苦苦而过,了了而去 文章目录 原生ajax使用FormData的细节问题数据的载体 原生ajax 执行顺序 创建xhr对象 var xhr new XMLHttpRequest()调用xhr.open(请求方式, url)函数&#…...

【HuggingFace 如何上传数据集 (2) 】国内网络-稳定上传图片、文本等各种格式的数据
【HuggingFace 下载】diffusers 中的特定模型下载,access token 使用方法总结【HuggingFace 下载中断】Git LFS 如何下载指定文件、单个文件夹?【HuggingFace 如何上传数据集】快速上传图片、文本等各种格式的数据 上文的方法因为是 https 协议…...

GNOME桌面安装dock
Although GNOME Shell integration extension is running, native host connector is not detected. Refer documentation for instructions about installing connector. sudo yum -y install chrome-gnome-shell...

移动app测试有哪些测试类型?安徽软件测试中心分享
科技信息时代,移动app的出现为我们的生活及工作带来了极大的便利。一款app从生产到上线必不可少的就是测试阶段,app测试是保障产品质量和安全的有效手段,那么移动app测试有哪些测试类型呢?安徽软件测试中心又有哪些? 1、功能性测试 需…...

Android 10.0 截屏流程
通常未通过特殊定制的 Android 系统,截屏都是经过同时按住音量下键和电源键来截屏。本篇文章就只讨论使用这些特殊按键来进行截屏。 这里我们就要明白事件是在哪里进行分发拦截的。通过源码的分析,我们发现是在PhoneWindowManager.java 中。 PhoneWindow…...

Axure零基础深入浅出的讲解
在当今的互联网产品设计领域,原型设计已经成为了产品经理、设计师和开发者之间沟通的桥梁。而Axure作为一款功能强大、灵活易用的原型设计工具,正是很多产品经理的得力助手。无论你是产品经理新手,还是资深设计师,Axure都能帮助你…...

PyTorch求导相关
PyTorch是动态图,即计算图的搭建和运算是同时的,随时可以输出结果;而TensorFlow是静态图。 在pytorch的计算图里只有两种元素:数据(tensor)和 运算(operation) 运算包括了…...

Halcon基础-瓶盖带角度的OCR批量识别
Halcon基础-OCR识别 1、OCR识别素材2、创建路径文件3、Halcon代码实现4、运行效果5、资源获取 1、OCR识别素材 这里我准备了7张不同角度的OCR图片,如下所示: 2、创建路径文件 按照下图所示创建全部文件夹和文件: 01用来存放OCR识别原图 c…...
详解)
后进先出(LIFO)详解
LIFO 是 Last In, First Out 的缩写,中文译为后进先出。这是一种数据结构的工作原则,类似于一摞盘子或一叠书本: 最后放进去的元素最先出来 -想象往筒状容器里放盘子: (1)你放进的最后一个盘子(…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...
)
uniapp 对接腾讯云IM群组成员管理(增删改查)
UniApp 实战:腾讯云IM群组成员管理(增删改查) 一、前言 在社交类App开发中,群组成员管理是核心功能之一。本文将基于UniApp框架,结合腾讯云IM SDK,详细讲解如何实现群组成员的增删改查全流程。 权限校验…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
基于距离变化能量开销动态调整的WSN低功耗拓扑控制开销算法matlab仿真
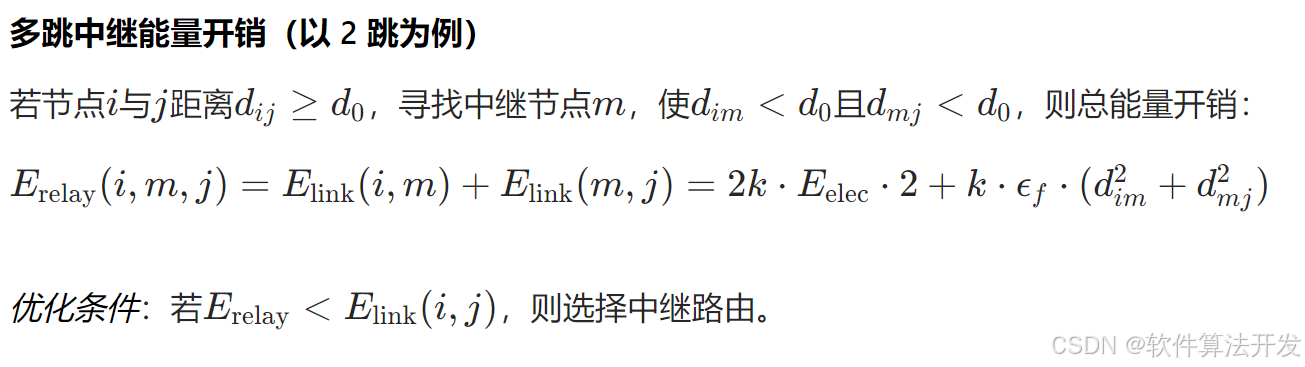
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.算法仿真参数 5.算法理论概述 6.参考文献 7.完整程序 1.程序功能描述 通过动态调整节点通信的能量开销,平衡网络负载,延长WSN生命周期。具体通过建立基于距离的能量消耗模型&am…...

SciencePlots——绘制论文中的图片
文章目录 安装一、风格二、1 资源 安装 # 安装最新版 pip install githttps://github.com/garrettj403/SciencePlots.git# 安装稳定版 pip install SciencePlots一、风格 简单好用的深度学习论文绘图专用工具包–Science Plot 二、 1 资源 论文绘图神器来了:一行…...

k8s从入门到放弃之Ingress七层负载
k8s从入门到放弃之Ingress七层负载 在Kubernetes(简称K8s)中,Ingress是一个API对象,它允许你定义如何从集群外部访问集群内部的服务。Ingress可以提供负载均衡、SSL终结和基于名称的虚拟主机等功能。通过Ingress,你可…...

FFmpeg 低延迟同屏方案
引言 在实时互动需求激增的当下,无论是在线教育中的师生同屏演示、远程办公的屏幕共享协作,还是游戏直播的画面实时传输,低延迟同屏已成为保障用户体验的核心指标。FFmpeg 作为一款功能强大的多媒体框架,凭借其灵活的编解码、数据…...
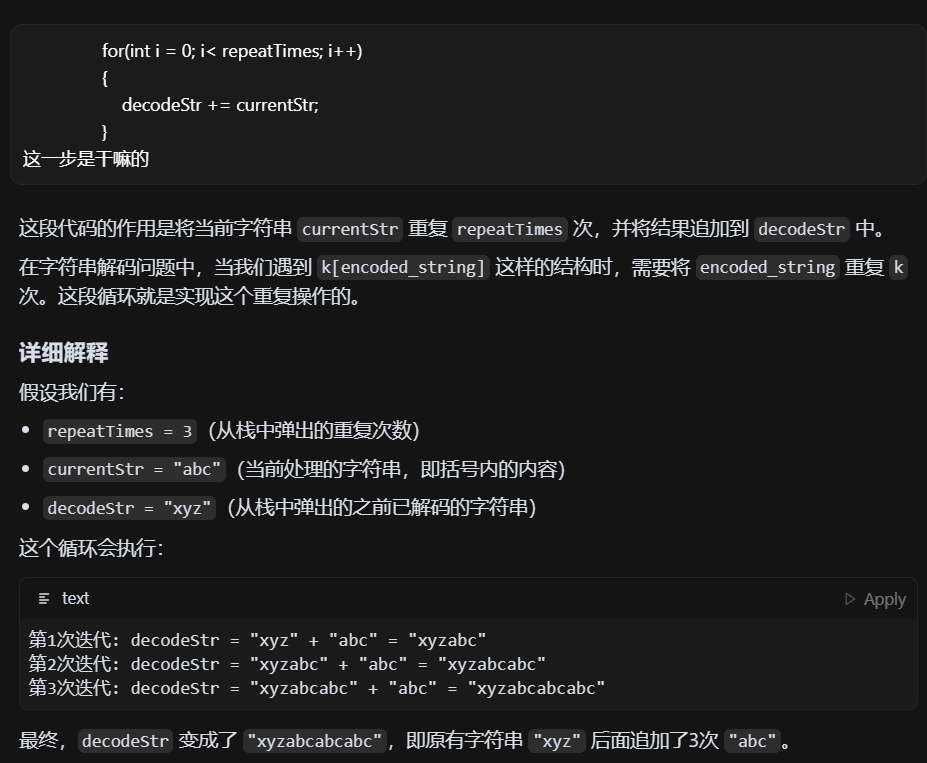
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...
:滤镜命令)
ffmpeg(四):滤镜命令
FFmpeg 的滤镜命令是用于音视频处理中的强大工具,可以完成剪裁、缩放、加水印、调色、合成、旋转、模糊、叠加字幕等复杂的操作。其核心语法格式一般如下: ffmpeg -i input.mp4 -vf "滤镜参数" output.mp4或者带音频滤镜: ffmpeg…...