机器人学习仿真框架
机器人学习仿真框架一般包含(自底向上):
- 3D仿真物理引擎:对现实世界的模拟仿真
- 机器人仿真平台:用于搭建工作场景,以实现agent与环境的交互学习
- 学习算法框架集合:不同的策略学习算法的实现
- 算法测试环境及benchmark:针对不同的定制化算法的测试环境以及评价标准
整体框架简要介绍
- 物理引擎:模拟现实世界物理行为的软件工具。可模拟牛顿动力学模型,使用质量、速度、摩擦力和空气阻力等变量,为刚性或柔性物体赋予真实的物理属性,基于此模拟物体的运动、旋转、碰撞等交互过程。本质上是一个计算器,执行模拟物理所需的数学计算。如下是一些流行的物理引擎
- PhysX (Nvidia):属于Nvidia GameWorks软件套件的一部分,拥有刚体动力学、软体动力学、关节、车辆动力学、流体力学等特性,是游戏和机器人领域最知名的物理引擎。Nvidai在GeForce系列图形卡上启用PhysX硬件加速
- Bullet
- MuJoCo、Havok、ODE、RaiSim、DART、Vortex、Simbody
- 经过某位网友调研发现(不保真),针对机器人学习领域,比较适合的物理引擎有:PhysX, Bullet, MuJoCo, RaiSim
- 机器人仿真平台:让用户在没有物理硬件的情况下也能快速对算法进行验证。一般来说,由于真实物理平台与仿真环境存在差异,仿真一般只在系统前期使用,后期还会要转到实际硬件平台上进行调试。如下是一些流行的机器人仿真平台
- Nvidia Isaac Sim:整合了PhysX物理引擎和RTX图像渲染引擎,并引入了Pixar公司开发的USD(Universal Scene Description)描述格式作为机器人和复杂场景的描述方式
- ROS-Gazebo:可访问ODE、Bullet、Simbody、DART多个物理引擎
- PyBullet:基于Bullet物理引擎开发的仿真环境。和python紧密结合,目前在强化学习中广泛应用
- PyBullet和Bullet的区别:PyBullet is a python module for sim, robotics and machine learning, it has rendering, inverse kinematics etc. Install is just pip install pybullet, it will do all, no need to manually install Bullet c++.
Bullet C++ is the underlying physics library, you don’t need to compile or install it, pip does that.
- PyBullet和Bullet的区别:PyBullet is a python module for sim, robotics and machine learning, it has rendering, inverse kinematics etc. Install is just pip install pybullet, it will do all, no need to manually install Bullet c++.
- MuJoCo、CoppeliaSim、MATLAB Robotics Toolbox、Webots、UE4(Unreal Engine)、Unity3D
- 该网友调研:Pybullet和MuJoCo在机器人学习领域尤其火
- 学习算法框架集合:类似于Numpy,只不过是强化学习算法的打包实现
- 如OpenAI Baselines、PyTorch DRL、Stable Baselines3、RLlib、rlpyt、Acme
- 算法测试环境及benchmark
- RLBench:有100个手工设计任务,旨在促进视觉引导的manipulation领域的研究(包含强化学习、模仿学习、多任务学习、几何计算机视觉)
- ControlSuite(DeepMind)、Gym(OpenAI)、RoboSchool(OpenAI)、Robosuite(Stanford)、RoboTurk(Stanford)、PyRoboLearn、Meta-World(Stanford)、SURREAL(Stanford)、OpenSpiel(DeepMind)、PyRobot(Facebook)、S-RL Toolbox、ROBEL(Google)、Menger(Google)、SEED RL(Google)、DERL(Stanford)
一些零碎的相关概念扫盲
- 目前机器人模拟器主要分两种类型:1)具身智能模拟器(为强化学习算法服务的);2)传统工业控制模拟器(基于模型控制服务的)
- 前者最早来自游戏产业,如Isaac Sim、Isaac Gym和SAPIEN都是基于PhysX这个物理引擎。Unity游戏设计框架也使用了PhysX物理引擎
- 具身智能模拟器更注重速度,但在接触点建模方面可能不够精细,但非常适合个人/实验室用户,只需一块显卡就能训练
- 后者像MIT Russ Tedrake开发的Drake模拟器,速度较慢,但在接触点建模方面更为精细,适用于最优控制等场景
- 机器人模拟器和一些基础力学的模拟器,如分析材料在一定力下是否变形的模拟器,都有各自的价值。它们在不同维度上强调速度和精度的权衡,各自有不同的定位。它们之间不是完全竞争的关系
- 做一个好的simulator最大的挑战是什么
- 更准确+更真实,往往需要牺牲速度和采样效率
- 对于强化学习等任务,采样效率可能是关键;而对于一些需要真实渲染的领域,如视觉和模仿学习,渲染质量可能更重要。因此不同研究中关注的特性可能不同
- 刚体模拟现在比较成熟,软体模拟相比之下是一个蓝海
- 模拟器目前没有一个大一统的标准,原因之一是许多主流模拟器背后是不同的科技巨头。如Isaac系列背后是Nvidia,MuJoCo背后是Google。这些科技巨头的目标是让模拟器与他们的硬件或编译器紧密耦合,以在自家计算平台上更好地部署(比如Nvidia的GPU、Google的TPU)
- 强化学习和模仿学习:
两种算法没有直接关联,且最早应用在机器人上时是不需要模拟器的。是因为强化学习对数据的需求量很大,即采样复杂度很高,而真实世界中采集大量数据非常困难,才转向使用模拟器的。
若想在模拟器中训练强化学习算法,就需要解决模拟器和真实机器人之间的sim2real gap问题,这个鸿沟不易填补。因此有人倾向于直接使用真实机器人数据,但强化学习对数据的需求量很大(采样复杂度很高),所以一些研究者更愿意采用模仿学习策略。
Yuzhe称,对于相对简单的任务,他更倾向于使用模仿学习,因为人类可以轻松使用遥控器采集数据;对于一些复杂、高动态的任务,真实世界中采集数据可能很困难,因此最好的做法是在模拟器中开始,并尝试将其迁移到真实环境中,这时就需要强化学习的方法。 - 如何解决sim2real gap的问题?
- 总的来说,Sim2Real Gap的问题大致分为两类:1)视觉方面的gap;2)物理方面的gap
- 视觉方面:即外观,取决于视觉感知的可靠性。在模拟器中,机器人可以获得非常真实的深度信息,但在真实世界中,使用的深度传感器可能存在噪声和不准确性,特别是在处理透明、反光等复杂材料时,可能会出现畸变等问题。可通过:1)优化硬件;2)随机化等解决
- 物理方面:和之前调研的差不多,论文里更详细
- 解决方法可分为三类
- 构建更好的模拟器:更好的物理仿真。如在深度相机仿真方面,传统方法简单地将渲染得到的物体深度直接用作深度传感器等数据,但也有一些工作采用更贴近真实深度相机原理的仿真
- 数据增强:通过增加更丰富的数据来拉近模拟和真实环境的数据。如在模拟器中训练一个模型,使其能抓取多种属性的杯子,那么迁移到真实世界中时,该模型更有可能成功地抓取真实世界的杯子。代表性工作是Domain Randomization。这点模拟器有天然优势,可利用模拟器进行大规模数据增强
- 寻找切入点:寻找一个在模拟器和真实世界之间差距较小的切入点,比如将问题简化,在简化的问题上使模拟器和真实世界趋于一致
- 总的来说,Sim2Real Gap的问题大致分为两类:1)视觉方面的gap;2)物理方面的gap
- 对于仿真数据和真实数据
对于一些简单的仿真任务,如抓取,在仿真中学到的策略迁移到真实世界时表现较为成熟;然而对于一些复杂的接触任务,特别是涉及接触点不断变化的情况,仿真效果并不理想,可能需要一些真实数据。因此他更倾向于使用模拟器对机器人模型进行初始化,最终通过在真实世界中微调(模型的权重)来学习出最终的策略 - 3D生成和模拟器
3D生成可为模拟器提供服务,可为模拟器提供环境和素材。在模拟器中需要模拟很多3D模型和物体,而最早这些模型由艺术家手工建模,成本较高。现在人们开始考虑如何利用AI生成的模型来丰富模拟器的内容,使其更强大。
大多数生成的3D素材以通用格式(如Mesh)存储,并且目前主流模拟器都能导入这类外部文件,因此没有出现点对点适配问题,大家都能使用和生成这些mesh格式的素材
相关文章:

机器人学习仿真框架
机器人学习仿真框架一般包含(自底向上): 3D仿真物理引擎:对现实世界的模拟仿真机器人仿真平台:用于搭建工作场景,以实现agent与环境的交互学习学习算法框架集合:不同的策略学习算法的实现算法测…...

力扣每日一题打卡 3180. 执行操作可获得的最大总奖励 I
给你一个整数数组 rewardValues,长度为 n,代表奖励的值。 最初,你的总奖励 x 为 0,所有下标都是 未标记 的。你可以执行以下操作 任意次 : 从区间 [0, n - 1] 中选择一个 未标记 的下标 i。如果 rewardValues[i] 大于…...
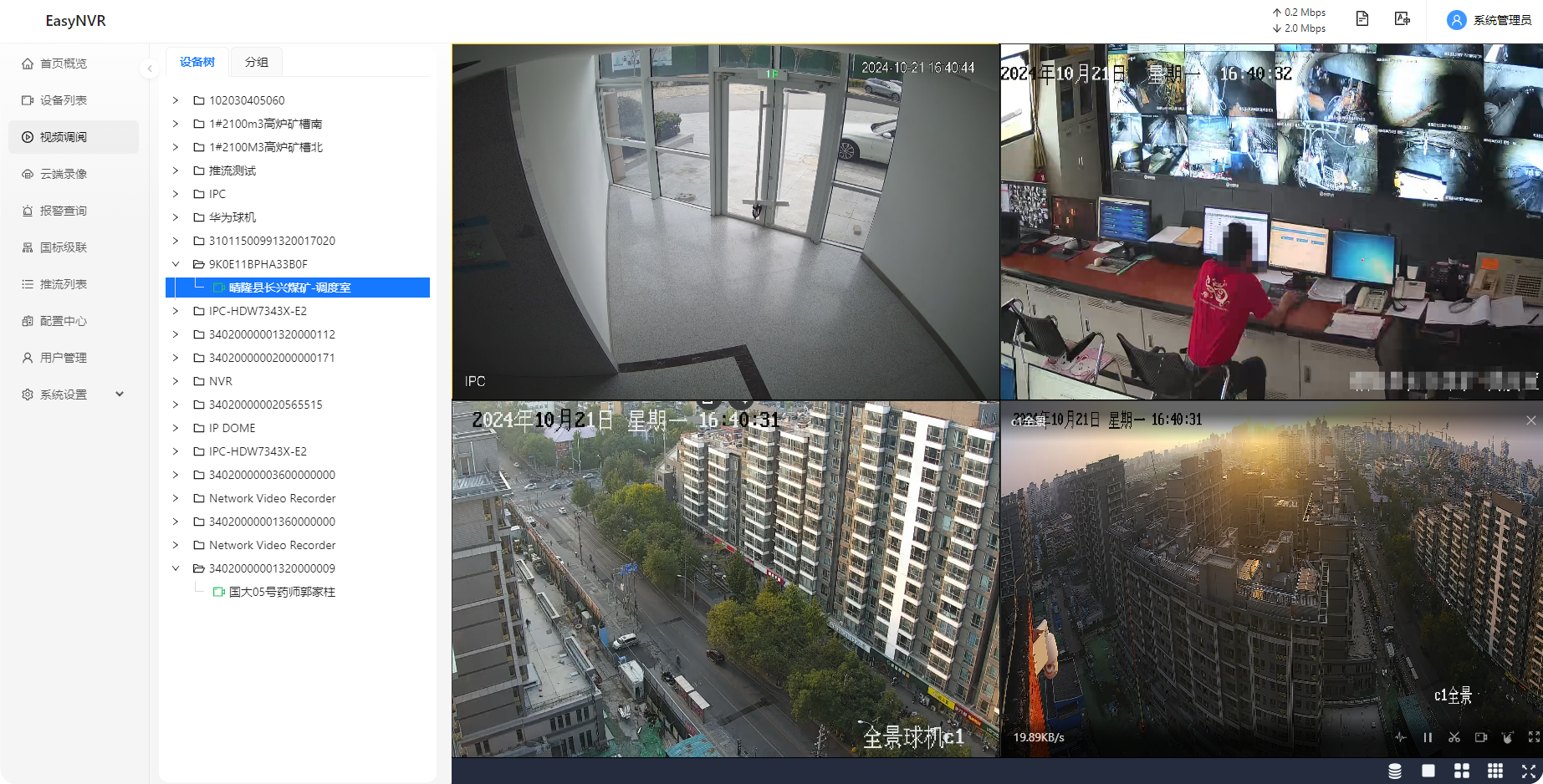
NVR录像机汇聚管理EasyNVR多品牌NVR管理工具/设备视频报警功能详解
在科技日新月异的今天,视频监控系统作为现代社会的“第三只眼”,正以前所未有的方式深刻影响着我们的生活与社会结构。从公共场所的安全监控到个人生活的记录分享,视频监控系统以其独特的视角和功能,为社会带来了诸多好处…...

springboot073车辆管理系统设计与实现(论文+源码)_kaic.zip
车辆管理系统 摘要 随着信息技术在管理上越来越深入而广泛的应用,管理信息系统的实施在技术上已逐步成熟。本文介绍了车辆管理系统的开发全过程。通过分析车辆管理系统管理的不足,创建了一个计算机管理车辆管理系统的方案。文章介绍了车辆管理系统的系统…...

2024.10月22日- MySql的 补充知识点
1、什么是数据库事务? 数据库事务: 是数据库管理系统执行过程中的一个逻辑单位,由一个有限的数据库操作序列构成,这些操作要么全部执行,要么全部不执行,是一个不可分割的工作单位。 2、Mysql事务的四大特性是什么? …...

Java中的对象——生命周期详解
1. 对象的创建 1.1 使用 new 关键字 执行过程:当使用 new 关键字创建对象时,JVM 会为新对象在堆内存中分配一块空间,并调用对应的构造器来初始化对象。 示例代码: MyClass obj new MyClass(); 内存变化:JVM 在堆…...
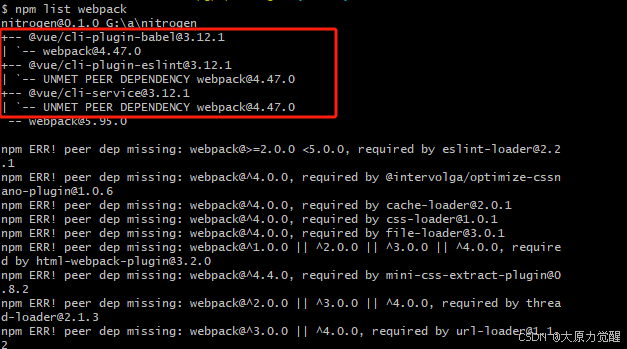
vue文件报Cannot find module ‘webpack/lib/RuleSet‘错误处理
检查 Node.js 版本:这个问题可能与 Node.js 的版本有关。你可以尝试将 Node.js 的版本切换到 12 或更低。如果没有安装 nvm(Node Version Manager),可以通过以下命令安装: curl -o- https://raw.githubusercontent.co…...
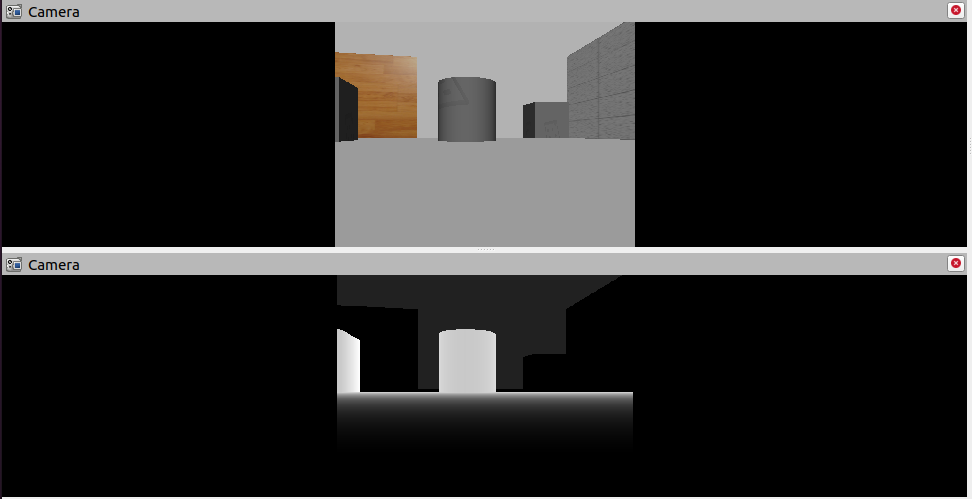
第 6 章 机器人系统仿真
对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真&#x…...

爬虫——scrapy的基本使用
一,scrapy的概念和流程 1. scrapy的概念 Scrapy是一个Python编写的开源网络爬虫框架。它是一个被设计用于爬取网络数据、提取结构性数据的框架。 框架就是把之前简单的操作抽象成一套系统,这样我们在使用框架的时候,它会自动的帮我们完成很…...
聚类分析算法——K-means聚类 详解
K-means 聚类是一种常用的基于距离的聚类算法,旨在将数据集划分为 个簇。算法的目标是最小化簇内的点到簇中心的距离总和。下面,我们将从 K-means 的底层原理、算法步骤、数学基础、距离度量方法、参数选择、优缺点 和 源代码实现 等角度进行详细解析。…...
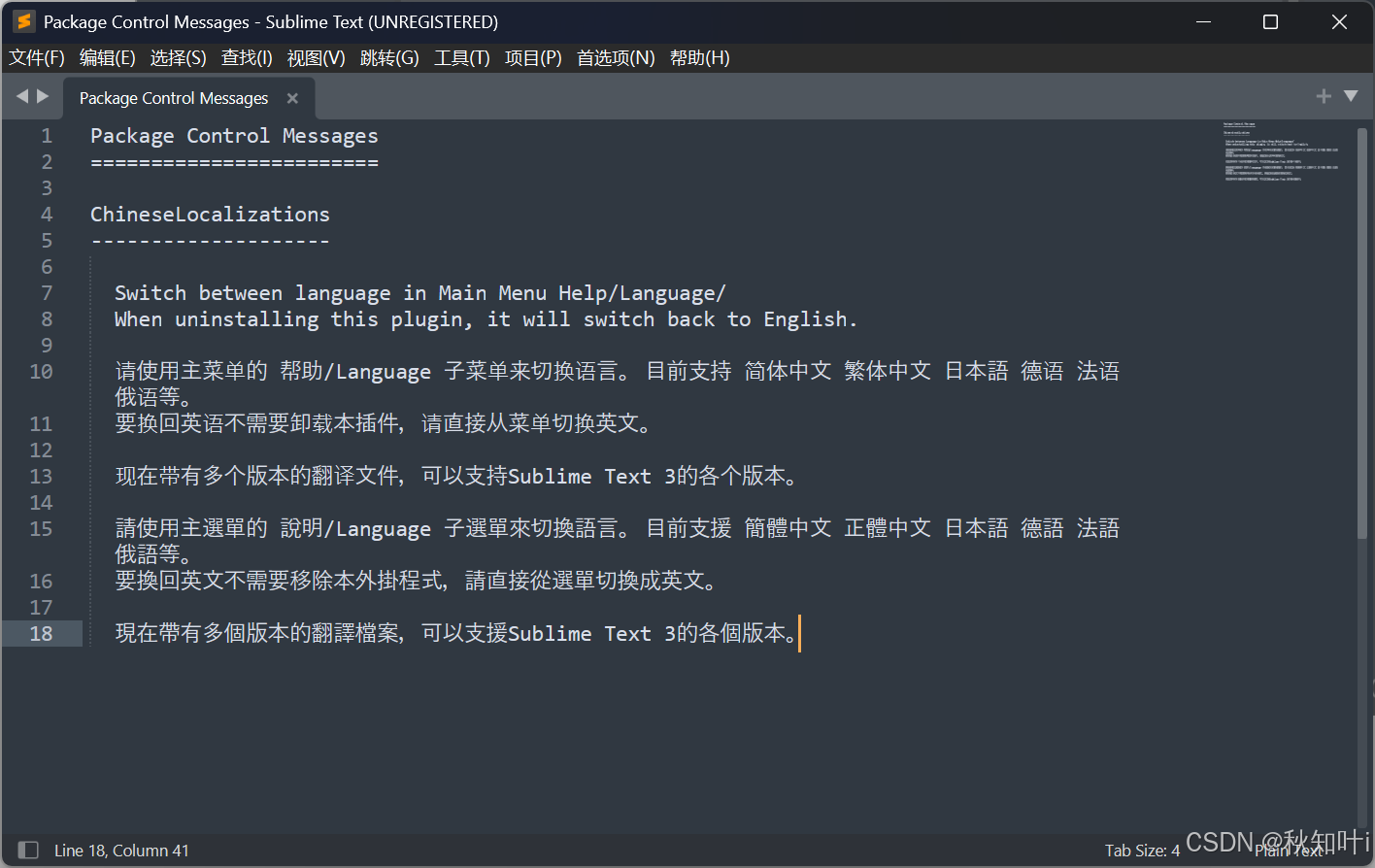
【Sublime Text】设置中文 最新最详细
在编程的艺术世界里,代码和灵感需要寻找到最佳的交融点,才能打造出令人为之惊叹的作品。而在这座秋知叶i博客的殿堂里,我们将共同追寻这种完美结合,为未来的世界留下属于我们的独特印记。 【Sublime Text】设置中文 最新最详细 开…...
C++学习路线(二十四)
静态成员函数 类的静态方法: 1.可以直接通过类来访问【更常用】,也可以通过对象(实例)来访问。 2.在类的静态方法中,不能访问普通数据成员和普通成员函数(对象的数据成员和成员函数) 1)静态数据成员 可以直接访问“静态数据成员”对象的成…...

MySQL-存储过程/函数/触发器
文章目录 什么是存储过程存储过程的优缺点存储过程的基本使用存储过程的创建存储过程的调用存储过程的删除存储过程的查看delimiter命令 MySQL中的变量系统变量用户变量局部变量参数 if语句case语句while循环repeat循环loop循环游标cursor捕获异常并处理存储函数触发器触发器概…...
前端页面样式没效果?没应用上?
当我们在开发项目时会有很多个页面、相同的标签,也有可能有相同的class值。样式设置的多了,分不清哪个是当前应用的。我们可以使用网页的开发者工具。 在我们开发的网页中按下f12或: 在打开的工具中我们可以使用元素选择器,单击我…...

Mac apache配置cgi环境-修改httpd.conf文件、启动apache
Mac自带Apache,配置CGI,分以下几步: 找到httpd.conf。打开终端,编辑以下几处,去掉#或补充内容。在这个路径下写一个测试文件.py格式的,/Library/WebServer/CGI-Executables,注意第一行的python…...

多厂商的实现不同vlan间通信
Cisco单臂路由 Cisco路由器配置 -交换机配置 -pc配置 华三的单臂路由 -路由器配置 -华三的接口默认是打开的 -pc配置及ping的结果 -注意不要忘记配置默认网关 Cisco-SVI -交换机的配置 -创建vlan -> 设置物理接口对应的Acess或Trunk -> 进入vlan接口,打开接…...

sh与bash的区别
sh与bash的区别 结论:对于一般开发者,没有区别;对于要使脚本兼容较老系统,或者兼容其他shell(如ksh,dash),那么意义可能很重大,要确保自己代码没有bash扩展的特性。 区…...
D48【python 接口自动化学习】- python基础之类
day48 练习:开发自动咖啡(上) 学习日期:20241025 学习目标:类 -- 62 小试牛刀:如何开发自动咖啡机?(上) 学习笔记: 案例解析 定义类 定义属性和方法 clas…...

PostgreSQL(WINDOWS)下载、安装、简单使用
下载 PostgreSQL: Downloads PostgreSQL: Windows installers EDB: Open-Source, Enterprise Postgres Database Management 安装 注意密码要方便自己使用,不能忘记。 打开pgAdmin,输入密码 新建数据库 打开命令工具 新建表...
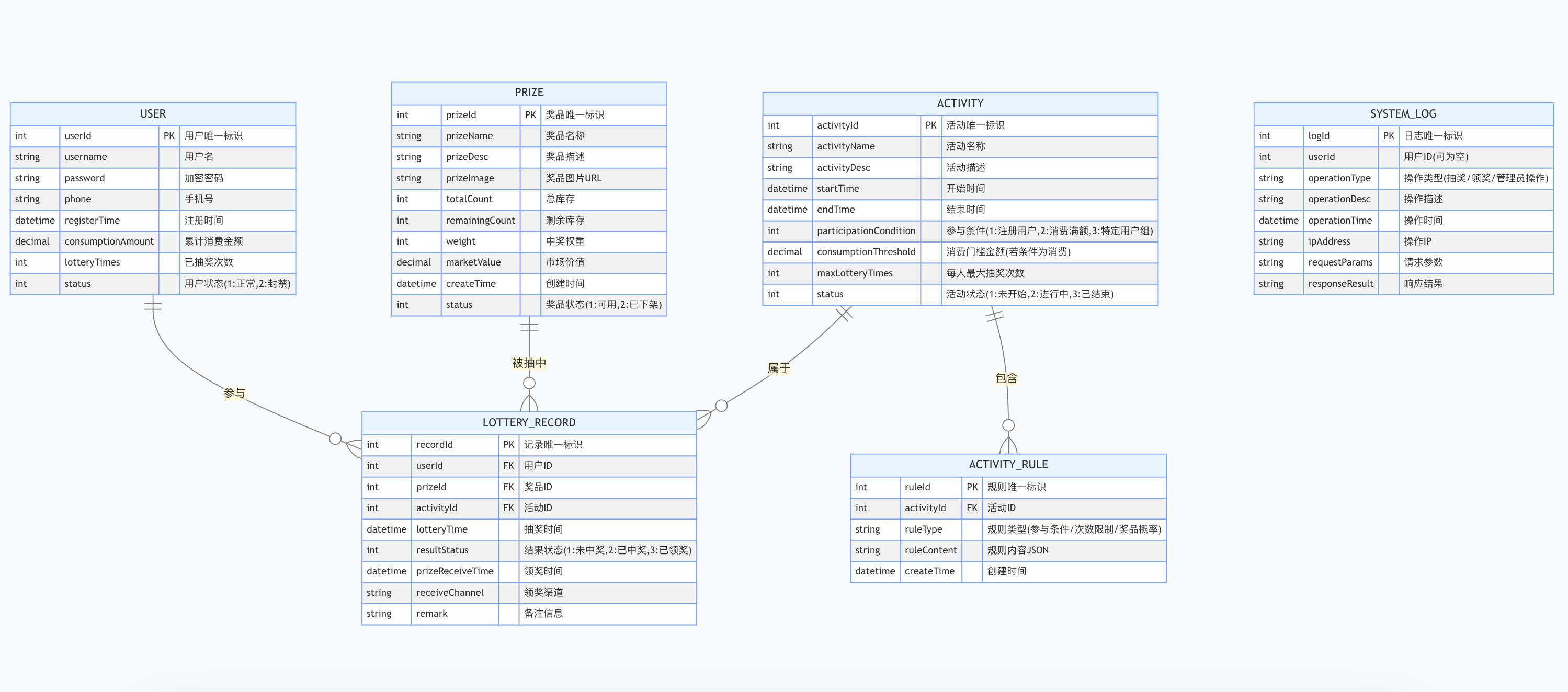
简易版抽奖活动的设计技术方案
1.前言 本技术方案旨在设计一套完整且可靠的抽奖活动逻辑,确保抽奖活动能够公平、公正、公开地进行,同时满足高并发访问、数据安全存储与高效处理等需求,为用户提供流畅的抽奖体验,助力业务顺利开展。本方案将涵盖抽奖活动的整体架构设计、核心流程逻辑、关键功能实现以及…...
基于uniapp+WebSocket实现聊天对话、消息监听、消息推送、聊天室等功能,多端兼容
基于 UniApp + WebSocket实现多端兼容的实时通讯系统,涵盖WebSocket连接建立、消息收发机制、多端兼容性配置、消息实时监听等功能,适配微信小程序、H5、Android、iOS等终端 目录 技术选型分析WebSocket协议优势UniApp跨平台特性WebSocket 基础实现连接管理消息收发连接…...

React Native在HarmonyOS 5.0阅读类应用开发中的实践
一、技术选型背景 随着HarmonyOS 5.0对Web兼容层的增强,React Native作为跨平台框架可通过重新编译ArkTS组件实现85%以上的代码复用率。阅读类应用具有UI复杂度低、数据流清晰的特点。 二、核心实现方案 1. 环境配置 (1)使用React Native…...

基础测试工具使用经验
背景 vtune,perf, nsight system等基础测试工具,都是用过的,但是没有记录,都逐渐忘了。所以写这篇博客总结记录一下,只要以后发现新的用法,就记得来编辑补充一下 perf 比较基础的用法: 先改这…...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...

Caliper 配置文件解析:config.yaml
Caliper 是一个区块链性能基准测试工具,用于评估不同区块链平台的性能。下面我将详细解释你提供的 fisco-bcos.json 文件结构,并说明它与 config.yaml 文件的关系。 fisco-bcos.json 文件解析 这个文件是针对 FISCO-BCOS 区块链网络的 Caliper 配置文件,主要包含以下几个部…...

【碎碎念】宝可梦 Mesh GO : 基于MESH网络的口袋妖怪 宝可梦GO游戏自组网系统
目录 游戏说明《宝可梦 Mesh GO》 —— 局域宝可梦探索Pokmon GO 类游戏核心理念应用场景Mesh 特性 宝可梦玩法融合设计游戏构想要素1. 地图探索(基于物理空间 广播范围)2. 野生宝可梦生成与广播3. 对战系统4. 道具与通信5. 延伸玩法 安全性设计 技术选…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...