使用kalibr_calibration标定相机(realsense)和imu(h7min)
vslam-evaluation/VINS/Installation documentation/4.IMU和相机联合标定kalibr_calibration.md at master · DroidAITech/vslam-evaluation · GitHub
目录
1.kalibr安装
1.1安装依赖项
1.2创建工作空间
1.3下载kalibr并编译
1.4设置环境变量
2.准备标定板
3.配置驱动和打开realsense摄像头
3.1更新系统
3.2注册服务器公钥
3.3添加Intel RealSense仓库
3.4安装realsense SDK
3.5测试RealSense D435/D435i
3.6ROS环境下的配置
3.7启动ROS节点并测试摄像头
3.8查看相机内参等信息通过rostopic echo /camera/color/data_raw
4.用imu_utils标定IMU数据
注意:
5.录制imu和相机的bag包
6.相机、imu、标定板yaml文件
1.kalibr安装
1.1安装依赖项
sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev ros-kinetic-vision-opencv ros-kinetic-image-transport-plugins ros-kinetic-cmake-modules python-software-properties software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-devsudo pip install python-igraph --upgrade1.2创建工作空间
mkdir -p ~/kalibr_workspace/srccd ~/kalibr_workspacesource /opt/ros/kinetic/setup.bashcatkin initcatkin config --extend /opt/ros/kineticcatkin config --cmake-args -DCMAKE_BUILD_TYPE=Release1.3下载kalibr并编译
cd ~/kalibr_workspace/srcgit clone https://github.com/ethz-asl/Kalibr.gitcd ~/kalibr_workspacecatkin build -DCMAKE_BUILD_TYPE=Release -j4 1.4设置环境变量
source ~/kalibr_workspace/devel/setup.bash2.准备标定板
标定板可以用 kalibr 提供的pdf 下载地址为:https://github.com/ethz-asl/kalibr/wiki/downloads, 由于Aprilgrid能提供序号信息, 能够防止姿态计算时出现跳跃的
情况,所以这里采用Aprilgrid 6x6 0.8x0.8 m (A0 page)进行标定。
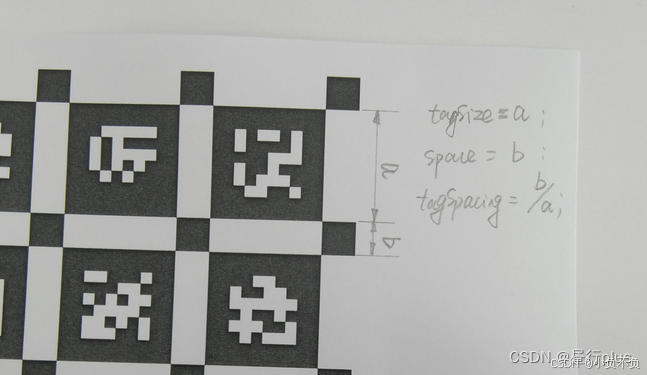
我下载了这个pdf, 打印成了A4纸大小,在标定前, 注意测量格子的尺寸信息填入yaml文件, 尺寸信息具体是哪些数据可以看看kalibr的说明,说明的网址为:
https://github.com/ethz-asl/kalibr/wiki/calibration-targets
3.配置驱动和打开realsense摄像头
3.1更新系统
sudo apt-get update && sudo apt-get upgrade3.2注册服务器公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE3.3添加Intel RealSense仓库
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u3.4安装realsense SDK
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils3.5测试RealSense D435/D435i
realsense-viewer3.6ROS环境下的配置
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera
sudo apt-get install ros-$ROS_DISTRO-realsense2-description3.7启动ROS节点并测试摄像头
roslaunch realsense2_camera rs_camera.launch
//see images
rosrun image_view image_view image:=/camera/color/image_raw3.8查看相机内参等信息通过rostopic echo /camera/color/data_raw
4.用imu_utils标定IMU数据
双目相机 -- IMU联合标定_双目+imu 如何标定-CSDN博客
使用Kalibr标定相机和IMU(ZED+px4)外参-CSDN博客(我参考了这篇博客的imu)
sudo apt-get install libdw-dev4.1下载imu_utils和code_utils,并将imu_utils和code_utils放在工作空间下。
code_utils.zip
imu_utils.zip
注意:
1. code_utils 依赖 ceres库, 需要先全局安装ceres库,okvis等内部的ceres不行。
2. 由于imu_utils依赖code_utils,所以先把code_utils放在工作空间的src下面,然后编译。
3. 编译code_utils 报错, fatal error: backward.hpp: No such file or directory
解决办法: 在code_utils下面找到sumpixel_test.cpp,修改#include “backward.hpp” 为
#include “code_utils/backward.hpp” 即可编译成功。
cd catkin_ws
catkin_make4.2编译成功以后,再把imu_utils放到工作空间的src下面,进行编译。
cd catkin_ws
catkin_make4.3让IMU静止不动两个小时,录制IMU的bag.
cd MYNT-EYE-D-SDK
source wrappers/ros/devel/setup.bash
roslaunch mynteye_wrapper_d display.launch
rosbag record /mynteye/imu/data_raw -O imu.bag4.4两个小时以后按Ctrl+C完成录制。
4.5获得这四个参数
Gyr:avg-axis:gyr_n: 3.1820671461855504e-03gyr_w: 3.0693398103399251e-05
Acc:avg-axis:acc_n: 2.6449533258549235e-02acc_w: 7.2111910796954259e-045.录制imu和相机的bag包
rosbag record /camera/color/image_raw /mavros/imu/data_raw -O imu_camera.bag
注意:1.录制bag包的时候imu的频率应为200hz左右
2.录制的时候要注意按照官方的说法-充分激励IMU- 绕3个轴旋转和3个方向的平移,这里有个官方视频介绍,打不开的话有人把它搬到B站上了https://www.youtube.com/watch?app=desktop&v=puNXsnrYWTY
3.三个topic按照自己的情况改。另外可以再加两个(非必要): /camera/left/camera_info /camera/right/camera_info
4.录制时间大于30min
6.相机、imu、标定板yaml文件
相机
cam0:cam_overlaps: [] camera_model: "pinhole" # 相机模型,kalibr也支持鱼眼模型distortion_coeffs: [0.0, 0.0, 0.0, 0.0] # 相机畸变参数distortion_model: "radtan" # 畸变模型intrinsics: [603.3211669921875, 602.70361328125, 324.1352844238281, 242.0079803466797] # 内参resolution: [640, 480] # 分辨率rostopic: "/camera/color/image_raw" # ROS话题
imu
rostopic: /mavros/imu/data_raw
update_rate: 195 #Hzaccelerometer_noise_density: 0.1 #VINS默认 0.2
accelerometer_random_walk: 0.03 #0.05
gyroscope_noise_density: 0.02 #0.02
gyroscope_random_walk: 0.00004 #4e-5target
#example for aprilgridtarget_type: 'aprilgrid' #gridtypetagCols: 6 #number of apriltagstagRows: 6 #number of apriltagstagSize: 0.02 #size of apriltag, edge to edge [m]tagSpacing: 0.3 #ratio of space between tags to tagSize a=0.02cm b=0.006cm
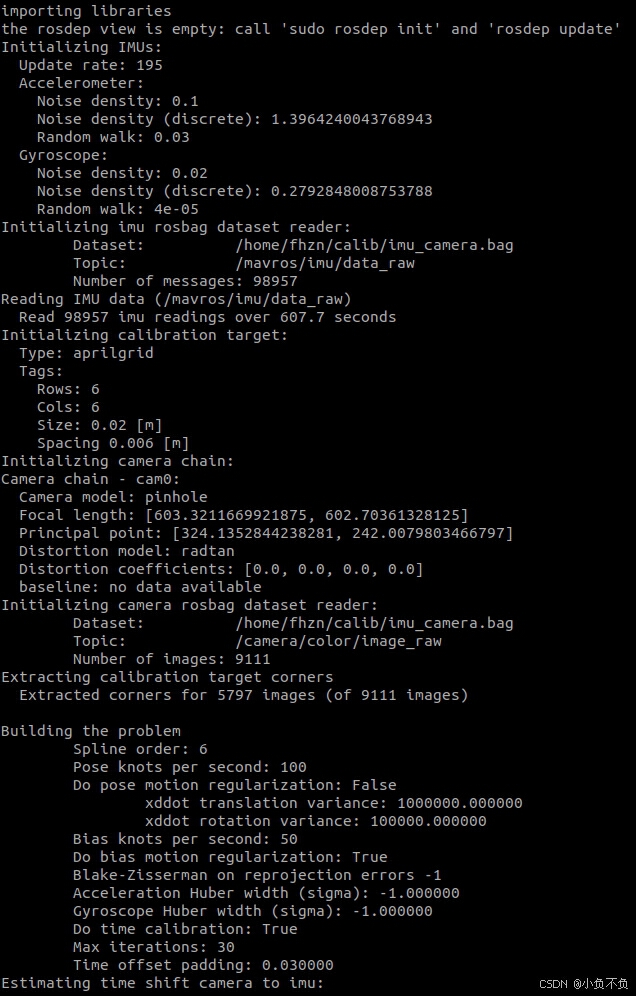
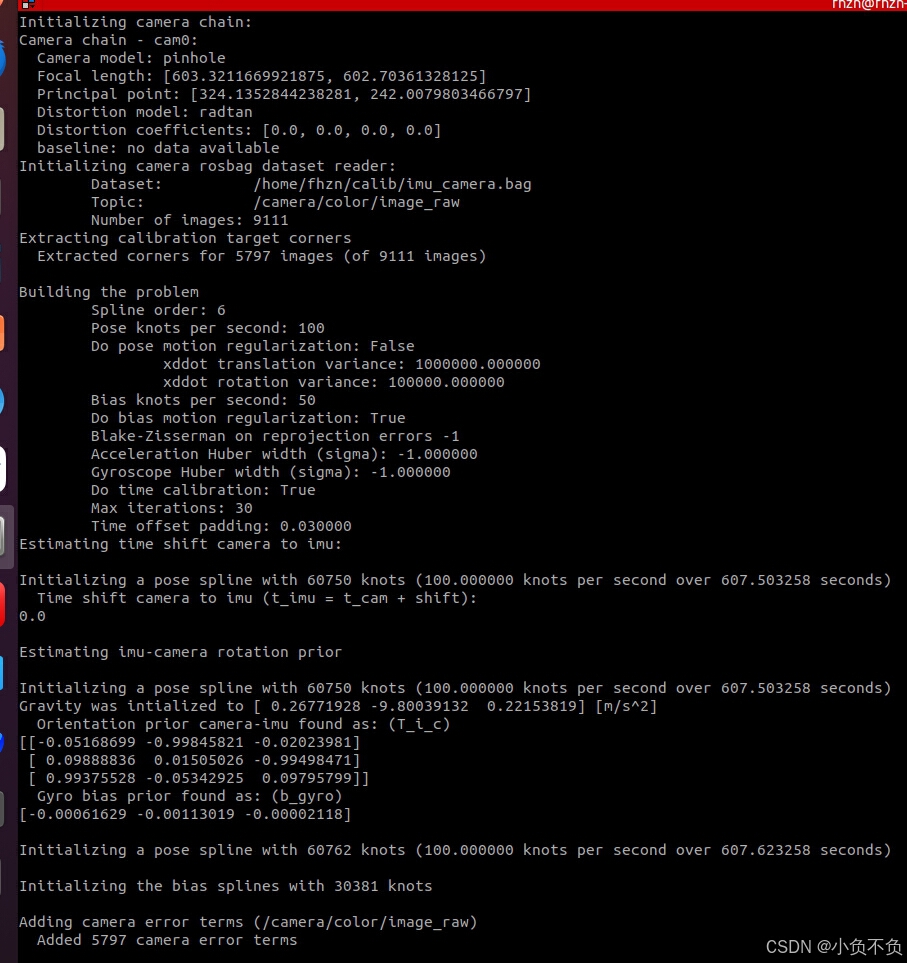
7.运行获取结果
rosrun kalibr kalibr_calibrate_imu_camera --imu /home/fhzn/calib/imu.yaml --cam /home/fhzn/calib/camera.yaml --target /home/fhzn/calib/target.yaml --bag /home/fhzn/calib/imu_camera.bag --show-extraction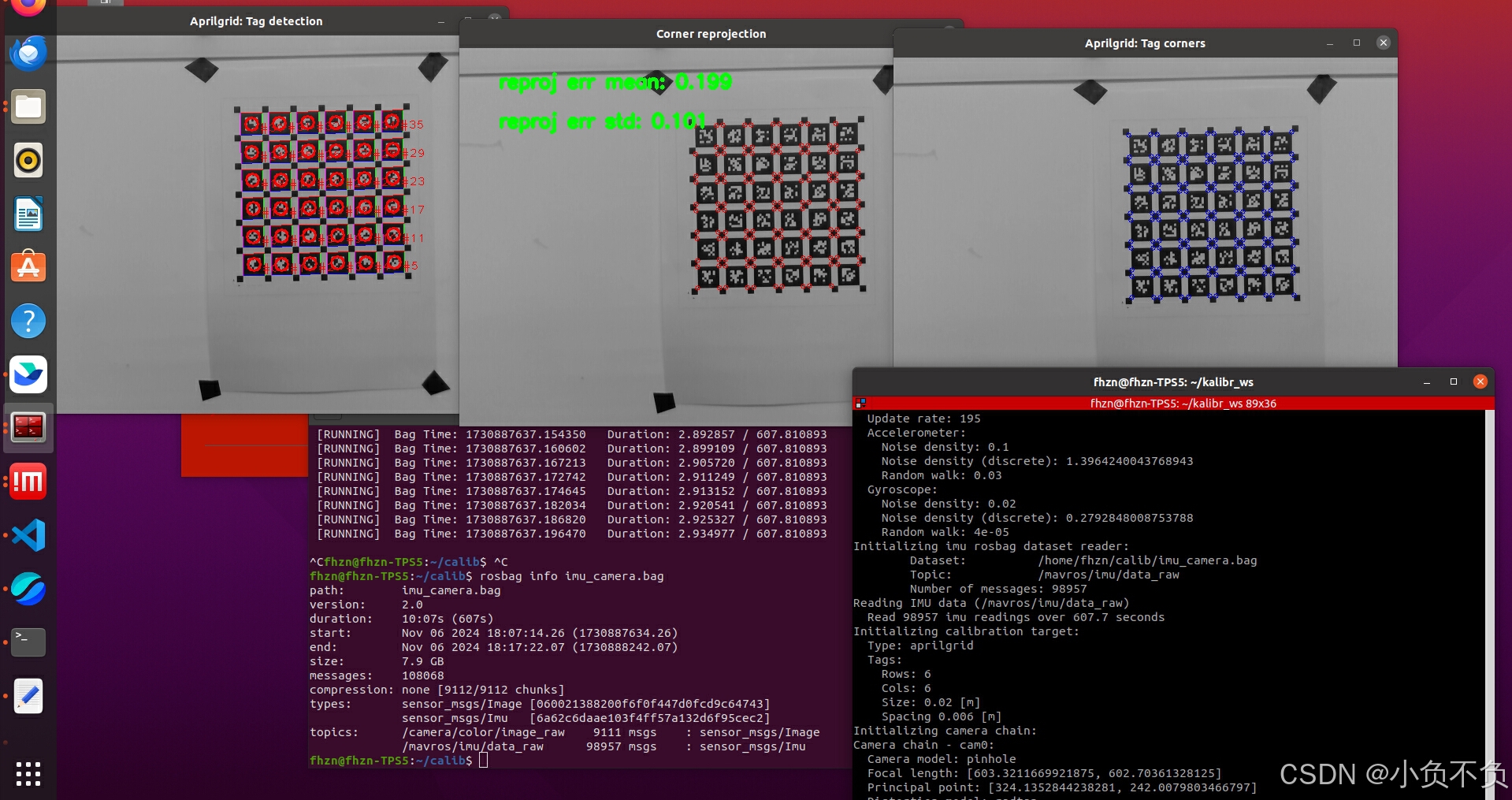
使用kalibr标定双目相机以及IMU--安装运行标定全过程以及踩坑记录-CSDN博客
相关文章:
使用kalibr_calibration标定相机(realsense)和imu(h7min)
vslam-evaluation/VINS/Installation documentation/4.IMU和相机联合标定kalibr_calibration.md at master DroidAITech/vslam-evaluation GitHub 目录 1.kalibr安装 1.1安装依赖项 1.2创建工作空间 1.3下载kalibr并编译 1.4设置环境变量 2.准备标定板 3.配置驱动和打…...

绿色工厂认定流程
以下是认定绿色工厂的一般流程: 编制年度创建计划 各省辖市、省直管县(市)会结合本地区重点产业发展现状,挑选一批基础条件良好、有创建意愿和条件的企业进行储备培育,并依据当地工业企业发展实际情况按年度制定绿色工…...

《Python游戏编程入门》注-第5章5
《Python游戏编程入门》的“Analog Clock示例程序”部分讲解了模拟时钟的实现方法。该模拟时钟可以通过时针、分针和秒针的旋转,显示当前时间,如图1所示。 图1 模拟时钟 1 绘制圆 从图1中可以看出,时钟的边缘是一个白色的圆,可以通过如图2所示的代码进行绘制。 图2 绘制圆…...

LangChain Ollama实战文献检索助手(二)少样本提示FewShotPromptTemplate示例选择器
本期是用样例来提示大模型生成我们想要的答案。即在输入中给定提示的样例,以及提示模板,然后匹配较相关的样例进行文献综述。 创建示例样本FewShotPromptTemplate 这里我用GTP-o1生成了几个回答,作为样本 samples [{"theme": &…...

K倍区间 C++
1230. K倍区间 - AcWing题库 一开始想到的用前缀和来做,时间复杂度为O(n^2),Time Limit Exceeded #include <iostream> #include <cstring> #include <algorithm> #include <cstdio>using namespace std;const int N 100010;int n,k; in…...

Linux - 弯路系列3:安装和编译libvirt-4.5.0
系统:Anolis8(离线) 目录 1、步骤2、make过程中的错误错误1:error: xdr_u_int64_t undeclared (first use in this function) 3、make install的错误错误1:/usr/bin/mkdir -p ""/usr/local/etc/libvirt/nwf…...

Jenkins插件使用问题总结
Git Push插件 插件介绍 主要是用于git推送代码到远程仓库中使用,插件地址 pipeline中使用 官方说明中只有一句代码gitPush(gitScm: scm, targetBranch: env.BRANCH_NAME, targetRepo: origin) 流水线语法中也做的不齐全所以一开始我老是设置错,导致代…...
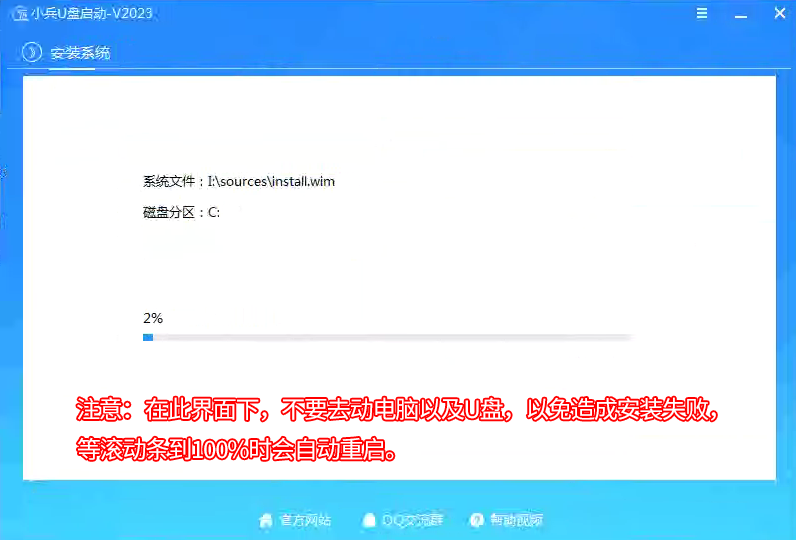
u盘怎么重装电脑系统_u盘重装电脑系统步骤和详细教程【新手宝典】
u盘怎么重装电脑系统?一个u盘怎么重装电脑系统呢,需要将u盘制作成u盘启动盘pe,然后通过U盘启动盘进入pe进行安装系统,下面小编就教大家u盘重装电脑系统步骤和详细教程。 u盘启动是什么意思? U盘启动盘是一种具有特殊功…...

Sql server查询数据库表的数量
SELECT count(*) FROM sys.objects WHERE typeU --统计表数量 SELECT NAME FROM sys.objects WHERE typeU --列出表名称 或者 SELECT COUNT(*) FROM SysObjects Where XTypeU --统计表数量 SELECT Name FROM SysObjects Where XTypeU --列出表名称 --判断字…...

Linux学习笔记之软件包管理RPM与YUM
RPM包的管理 介绍 RPM(RedHat Package Manager)用于互联网下载包的打包及安装工具,它包含在某些Linux分发版中。他生成具有.RPM扩展名的文件。RPM类似Windows的setup.exe,这一文件格式虽然打上了RedHat的标志,但理念…...

15分钟学 Go 第 41 天:中间件的使用
第41天:中间件的使用 目标:学习如何在Go语言的Web服务中使用中间件 中间件(Middleware)是Web开发中的一种常见设计模式,通常用于处理请求和响应过程中的一些共通功能。比如:日志记录、认证授权、请求处理…...

《Python 与 SQLite:强大的数据库组合》
《Python 与 SQLite:强大的数据库组合》 一、Python 与 SQLite 的结合二、安装与连接(一)安装 SQLite 模块(二)连接到数据库 三、数据库操作(一)创建表格(二)插入数据&am…...

Golang | Leetcode Golang题解之第552题学生出勤记录II
题目: 题解: const mod int 1e9 7type matrix [6][6]intfunc (a matrix) mul(b matrix) matrix {c : matrix{}for i, row : range a {for j : range b[0] {for k, v : range row {c[i][j] (c[i][j] v*b[k][j]) % mod}}}return c }func (a matrix) p…...

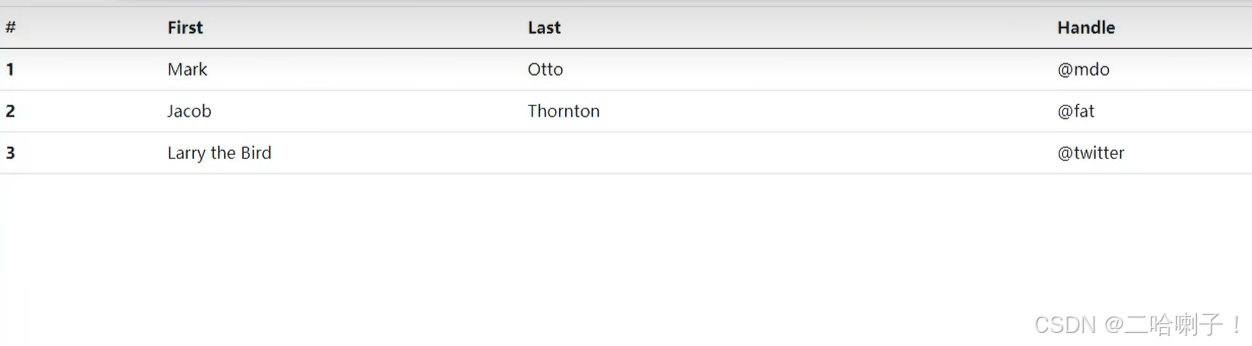
Vue3 常用代码指南手抄,超详细 cheatsheet
一、Vue3 基础 1.1 创建 Vue3 项目 使用 Vite 创建 npm create vitelatest my-vue-app -- --template vue cd my-vue-app npm install npm run dev使用 Vue CLI 创建 npm install -g vue/cli vue create my-vue-app1.2 项目结构 my-vue-app ├── node_modules ├── pu…...

结构体是否包含特定类型的成员变量
结构体是否包含特定类型的成员变量 在C中,可以使用模板元编程和类型特性(type traits)来判断一个结构体是否包含特定类型的成员变量。这通常通过std::is_member_object_pointer类型特性来实现,它可以用来检查给定的成员指针是否指…...
堆排序与链式二叉树:数据结构与排序算法的双重探索
大家好,我是小卡皮巴拉 文章目录 目录 引言 一.堆排序 1.1 版本一 核心概念 堆排序过程 1.2 版本二 堆排序函数 HeapSort 向下调整算法 AdjustDown 向上调整算法 AdjustUp 二.链式二叉树 2.1 前中后序遍历 链式二叉树的结构 创建链式二叉树 前序遍历…...
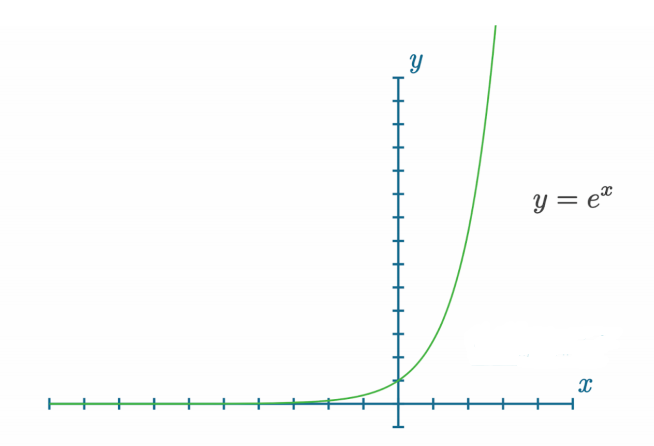
用 Python 从零开始创建神经网络(四):激活函数(Activation Functions)
激活函数(Activation Functions) 引言1. 激活函数的种类a. 阶跃激活功能b. 线性激活函数c. Sigmoid激活函数d. ReLU 激活函数e. more 2. 为什么使用激活函数3. 隐藏层的线性激活4. 一对神经元的 ReLU 激活5. 在隐蔽层中激活 ReLU6. ReLU 激活函数代码7. …...
使用 Flask 和 ONLYOFFICE 实现文档在线编辑功能
提示:CSDN 博主测评ONLYOFFICE 文章目录 引言技术栈环境准备安装 ONLYOFFICE 文档服务器获取 API 密钥安装 Flask 和 Requests 创建 Flask 应用项目结构编写 app.py创建模板 templates/index.html 运行应用功能详解文档上传生成编辑器 URL显示编辑器回调处理 安全性…...

【C++】【算法基础】序列编辑距离
编辑距离 题目 给定 n n n个长度不超过 10 10 10 的字符串以及 m m m 次询问,每次询问给出一个字符串和一个操作次数上限。 对于每次询问,请你求出给定的 n n n个字符串中有多少个字符串可以在上限操作次数内经过操作变成询问给出的字符串。 每个…...
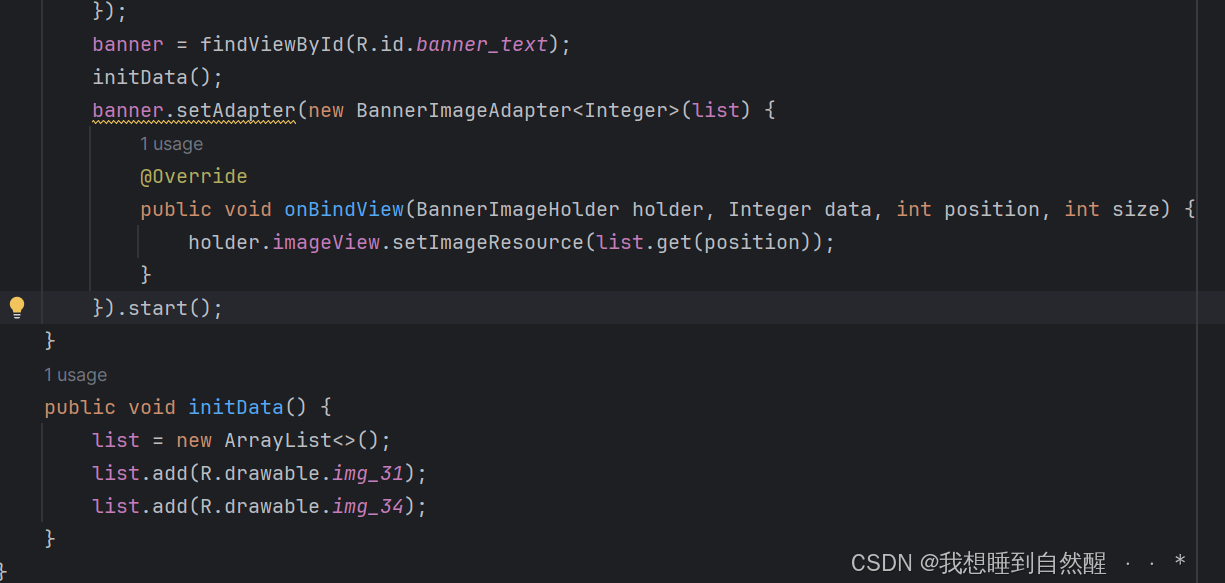
【Android】轮播图——Banner
引言 Banner轮播图是一种在网页和移动应用界面设计中常见的元素,主要用于在一个固定的区域内自动或手动切换一系列图片,以展示不同的内容或信息。这个控件在软件当中经常看到,商品促销、热门歌单、头像新闻等等。它不同于ViewPgaer在于无需手…...

AI-调查研究-01-正念冥想有用吗?对健康的影响及科学指南
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...

vscode里如何用git
打开vs终端执行如下: 1 初始化 Git 仓库(如果尚未初始化) git init 2 添加文件到 Git 仓库 git add . 3 使用 git commit 命令来提交你的更改。确保在提交时加上一个有用的消息。 git commit -m "备注信息" 4 …...
日语AI面试高效通关秘籍:专业解读与青柚面试智能助攻
在如今就业市场竞争日益激烈的背景下,越来越多的求职者将目光投向了日本及中日双语岗位。但是,一场日语面试往往让许多人感到步履维艰。你是否也曾因为面试官抛出的“刁钻问题”而心生畏惧?面对生疏的日语交流环境,即便提前恶补了…...

线程同步:确保多线程程序的安全与高效!
全文目录: 开篇语前序前言第一部分:线程同步的概念与问题1.1 线程同步的概念1.2 线程同步的问题1.3 线程同步的解决方案 第二部分:synchronized关键字的使用2.1 使用 synchronized修饰方法2.2 使用 synchronized修饰代码块 第三部分ÿ…...
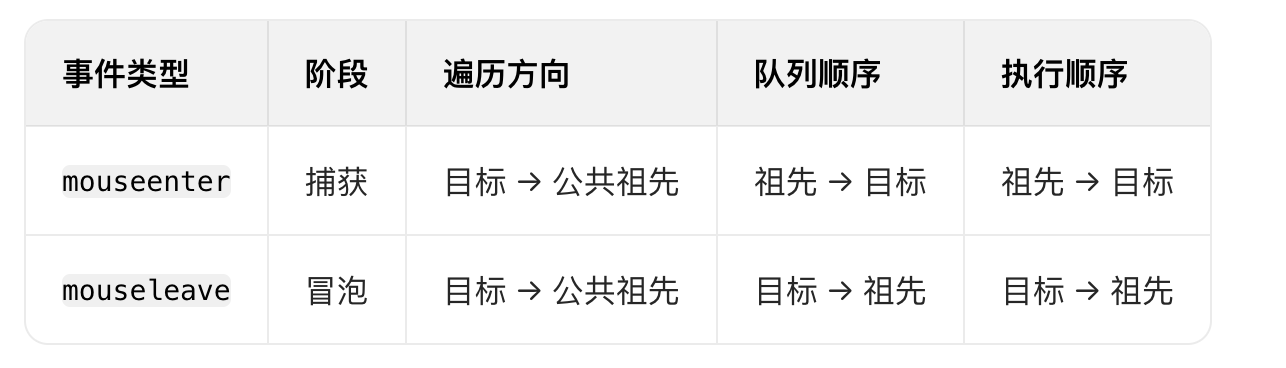
React19源码系列之 事件插件系统
事件类别 事件类型 定义 文档 Event Event 接口表示在 EventTarget 上出现的事件。 Event - Web API | MDN UIEvent UIEvent 接口表示简单的用户界面事件。 UIEvent - Web API | MDN KeyboardEvent KeyboardEvent 对象描述了用户与键盘的交互。 KeyboardEvent - Web…...

Nginx server_name 配置说明
Nginx 是一个高性能的反向代理和负载均衡服务器,其核心配置之一是 server 块中的 server_name 指令。server_name 决定了 Nginx 如何根据客户端请求的 Host 头匹配对应的虚拟主机(Virtual Host)。 1. 简介 Nginx 使用 server_name 指令来确定…...

PL0语法,分析器实现!
简介 PL/0 是一种简单的编程语言,通常用于教学编译原理。它的语法结构清晰,功能包括常量定义、变量声明、过程(子程序)定义以及基本的控制结构(如条件语句和循环语句)。 PL/0 语法规范 PL/0 是一种教学用的小型编程语言,由 Niklaus Wirth 设计,用于展示编译原理的核…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...

NFT模式:数字资产确权与链游经济系统构建
NFT模式:数字资产确权与链游经济系统构建 ——从技术架构到可持续生态的范式革命 一、确权技术革新:构建可信数字资产基石 1. 区块链底层架构的进化 跨链互操作协议:基于LayerZero协议实现以太坊、Solana等公链资产互通,通过零知…...
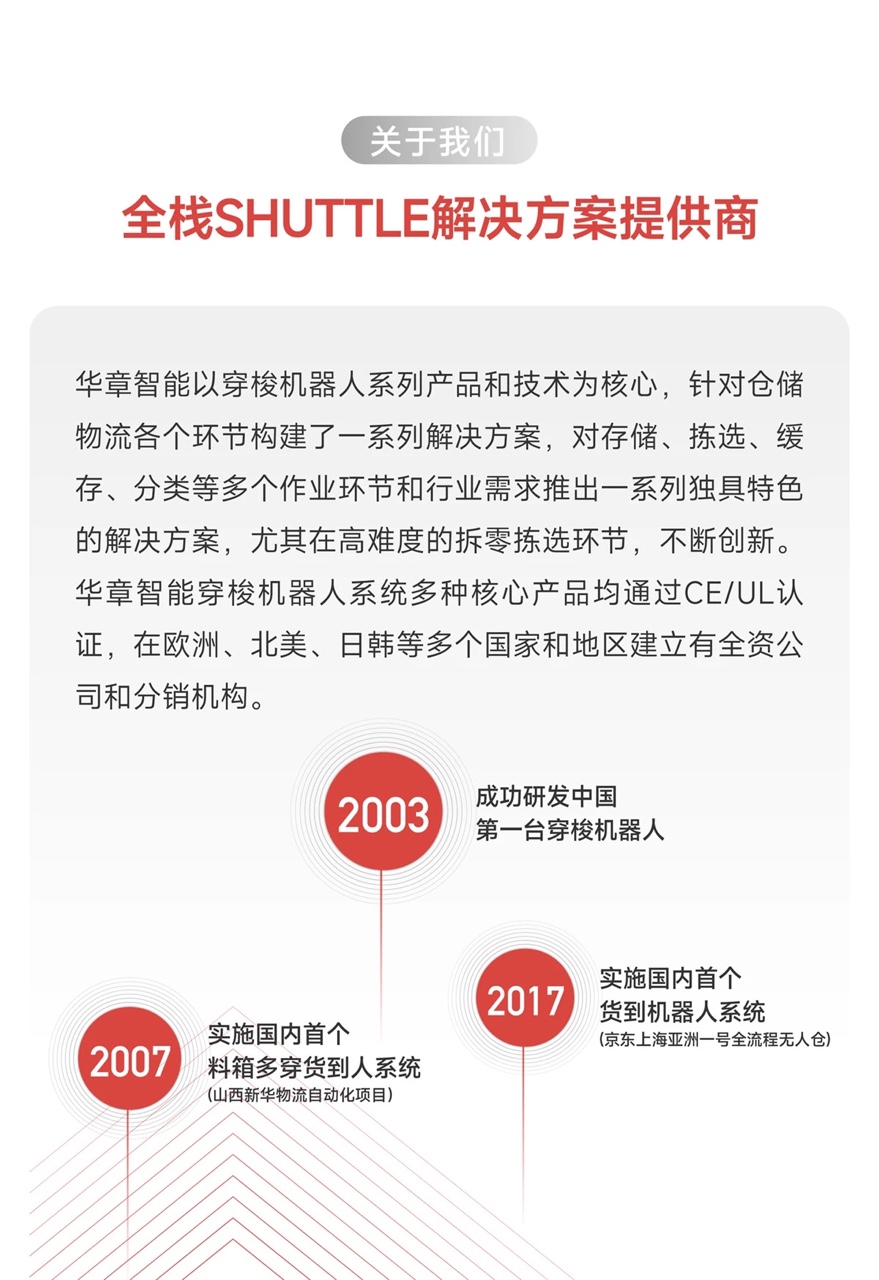
智能仓储的未来:自动化、AI与数据分析如何重塑物流中心
当仓库学会“思考”,物流的终极形态正在诞生 想象这样的场景: 凌晨3点,某物流中心灯火通明却空无一人。AGV机器人集群根据实时订单动态规划路径;AI视觉系统在0.1秒内扫描包裹信息;数字孪生平台正模拟次日峰值流量压力…...