Cesium 相机系统
Cesium 的相机系统是其 3D 地球渲染引擎的重要组成部分,它控制用户在虚拟地球上的视图和交互体验。Cesium 的相机系统具备灵活性和强大的功能,允许开发者自定义视图、导航和交互方式。以下是 Cesium 相机系统的主要特点和功能:
1. 相机的基本概念
在 Cesium 中,相机表示为一个对象,包含位置、方向和视野范围等属性。相机的核心属性包括:
- 位置(position):相机在世界坐标系中的位置,通常以 Cartesian3 表示。
- 方向(direction):相机的朝向,即相机镜头的指向。
- 上方向(up):定义相机的“上”方向。
- 右方向(right):定义相机的“右”方向,通常与方向和上方向正交。
相机的这些方向属性决定了相机的视角和观察范围。
2. 视图控制功能
Cesium 提供了一组函数,用于控制相机视图的切换和动画:
-
设置视图(setView):
viewer.camera.setView({destination: Cesium.Cartesian3.fromDegrees(longitude, latitude, height),orientation: {heading: Cesium.Math.toRadians(heading), // 朝向(方位角)pitch: Cesium.Math.toRadians(pitch), // 倾斜角roll: Cesium.Math.toRadians(roll) // 旋转角} });用于直接跳转到指定视图。
-
飞行到视图(flyTo):
viewer.camera.flyTo({destination: Cesium.Cartesian3.fromDegrees(longitude, latitude, height),duration: 5, // 飞行时间orientation: {heading: Cesium.Math.toRadians(heading),pitch: Cesium.Math.toRadians(pitch),roll: Cesium.Math.toRadians(roll)} });为用户提供平滑的动画过渡效果。
-
缩放和倾斜:
camera.zoomIn(amount):放大视图。camera.zoomOut(amount):缩小视图。- 通过调整 pitch 实现视角倾斜。
3. 相机限制
Cesium 支持为相机视图添加限制,以防止用户查看超出指定范围的区域:
- 范围限制:
camera.constrainedAxis = Cesium.Cartesian3.UNIT_Z; // 限制相机只能绕 Z 轴旋转 - 矩形范围约束:
camera.lookAtRectangle(Cesium.Rectangle.fromDegrees(west, south, east, north));
4. 事件监听
Cesium 支持监听用户与相机交互的事件,例如鼠标滚轮缩放、拖动地图等。主要的事件有:
- 鼠标操作事件:通过
ScreenSpaceEventHandler实现。var handler = new Cesium.ScreenSpaceEventHandler(scene.canvas); handler.setInputAction(function (movement) {var cartesian = viewer.camera.pickEllipsoid(movement.endPosition);console.log(cartesian); }, Cesium.ScreenSpaceEventType.MOUSE_MOVE);
5. 相机视锥
相机的视锥决定了视图中显示的内容。主要参数包括:
- 视锥角(Field of View, FOV):
相机的视锥角可以通过camera.frustum属性设置:viewer.camera.frustum.fov = Cesium.Math.toRadians(60); // 设置为60度 - 视距范围(Near/Far Clipping Planes):
控制相机视锥的近剪裁面和远剪裁面:viewer.camera.frustum.near = 1.0; // 最小可见距离 viewer.camera.frustum.far = 5000000.0; // 最大可见距离
6. 自由视角与锁定目标
- 自由视角:用户可以通过鼠标或触摸手势自由调整相机。
- 锁定目标:使用
lookAt方法使相机聚焦在特定目标上:var target = Cesium.Cartesian3.fromDegrees(longitude, latitude, height); viewer.camera.lookAt(target, new Cesium.Cartesian3(0, 0, 1000)); // 锁定目标,设置偏移量
7. 第三人称/第一人称视角
Cesium 支持模拟第三人称(鸟瞰)和第一人称(地面)视角切换:
- 第三人称视角:通常使用较高的视距和倾斜角。
- 第一人称视角:
viewer.camera.setView({destination: Cesium.Cartesian3.fromDegrees(longitude, latitude, height),orientation: {heading: Cesium.Math.toRadians(0),pitch: Cesium.Math.toRadians(-90),roll: Cesium.Math.toRadians(0)} });
Cesium 的相机系统功能丰富,可满足从简单的视图控制到复杂的交互和动画效果等各种需求。
相关文章:

Cesium 相机系统
Cesium 的相机系统是其 3D 地球渲染引擎的重要组成部分,它控制用户在虚拟地球上的视图和交互体验。Cesium 的相机系统具备灵活性和强大的功能,允许开发者自定义视图、导航和交互方式。以下是 Cesium 相机系统的主要特点和功能: 1. 相机的基本…...

数据结构(基本概念及顺序表——c语言实现)
基本概念: 1、引入 程序数据结构算法 数据: 数值数据:能够直接参加运算的数据(数值,字符) 非数值数据:不能够直接参加运算的数据(字符串、图片等) 数据即是信息的载…...

ZYNQ程序固化——ZYNQ学习笔记7
一、ZYNQ启动过程 二、 SD卡启动实操 1、对ZYNQ进行配置添加Flash 2、添加SD卡 3、重新生成硬件信息 4、创建vitis工程文件 5、勾选板级支持包 6、对系统工程进行整体编译,生成两个Debug文件,如图所示。 7、插入SD卡,格式化为 8、考入BOOT.…...

labview使用报表工具从数据库导出数据
之前写了一篇labview从数据库导出数据到excel电子表格,但是是基于调用excel的activeX控件,有时候会有一些bug,就比如我工作机就无法显示方法,后面大哥指点才知道没有的原因是excel安装不完整。像我的工作机就没有这个选项。就需要…...
#define定义宏(2)
大家好,今天给大家分享两个技巧。 首先我们应该先了解一下c语言中字符串具有自动连接的特点。注意只有将字符串作为宏参数的时候才可以把字符串放在字符串中。 下面我们来讲讲这两个技巧 1.使用#,把一个宏参数变成对应的字符串。 2.##的作用 可以把位…...

CentOS网络配置
上一篇文章:VMware Workstation安装Centos系统 在CentOS系统中进行网络配置是确保系统能够顺畅接入网络的重要步骤。本文将详细介绍如何配置静态IP地址、网关、DNS等关键网络参数,以帮助需要的人快速掌握CentOS网络配置的基本方法和技巧。通过遵循本文的…...

基于vue框架的的网上宠物交易管理系统46sn1(程序+源码+数据库+调试部署+开发环境)带论文文档1万字以上,文末可获取,系统界面在最后面。
系统程序文件列表 项目功能:用户,宠物分类,宠物信息 开题报告内容 基于Vue框架的网上宠物交易管理系统开题报告 一、研究背景 随着互联网技术的飞速发展和人们生活水平的提高,宠物已成为许多家庭的重要成员。宠物市场的繁荣不仅体现在实体店的遍地开…...

MySQL数据库:SQL语言入门 【2】(学习笔记)
目录 2,DML —— 数据操作语言(Data Manipulation Language) (1)insert 增加 数据 (2)delete 删除 数据 truncate 删除表和数据,再创建一个新表 (3…...

MySQL深度剖析-索引原理由浅入深
什么是索引? 官方上面说索引是帮助MySQL高效获取数据的数据结构,通俗点的说,数据库索引好比是一本书的目录,可以直接根据页码找到对应的内容,目的就是为了加快数据库的查询速度。 索引是对数据库表中一列或多列的值进…...
路径规划——RRT-Connect算法
路径规划——RRT-Connect算法 算法原理 RRT-Connect算法是在RRT算法的基础上进行的扩展,引入了双树生长,分别以起点和目标点为树的根节点同时扩展随机树从而实现对状态空间的快速搜索。在此算法中以两棵随机树建立连接为路径规划成功的条件。并且&…...
数据科学与SQL:如何计算排列熵?| 基于SQL实现
目录 0 引言 1 排列熵的计算原理 2 数据准备 3 问题分析 4 小结 0 引言 把“熵”应用在系统论中的信息管理方法称为熵方法。熵越大,说明系统越混乱,携带的信息越少;熵越小,说明系统越有序,携带的信息越多。在传感…...

Redis/Codis性能瓶颈揭秘:网卡软中断的影响与优化
目录 现象回顾 问题剖析 现场分析 解决方案 总结与反思 1.调整中断亲和性(IRQ Affinity): 2.RPS(Receive Packet Steering)和 RFS(Receive Flow Steering): 近期,…...
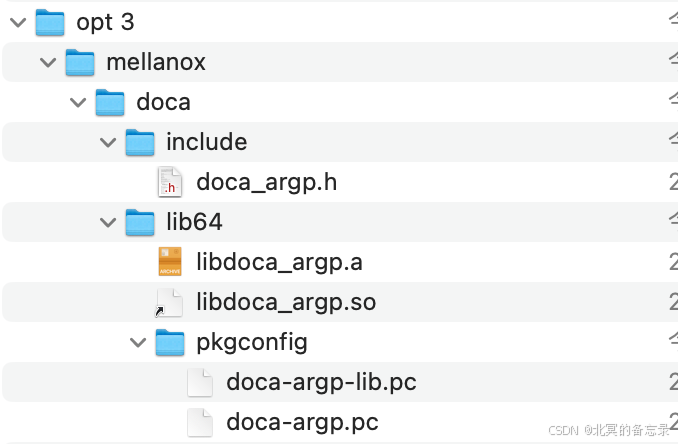
微知-DOCA ARGP参数模块的相关接口和用法(config单元、params单元,argp pipe line,回调)
文章目录 1. 背景2. 设置参数的主要流程2.1 初始化2.2 注册某个params的处理方式以及回调函数2.4 定义好前面的params以及init指定config地点后start处理argv 3. 其他4. DOCA ARGP包相关4.1 主要接口4.2 DOCA ARGP的2个rpm包4.2.1 doca-sdk-argp-2.9.0072-1.el8.x86_64.rpm4.2.…...
)
PostgreSQL高可用Patroni安装(超详细)
目录 一 安装Patroni 0 Patroni 对Python的版本要求 1 卸载原来的Python 3.6 版本 2 安装Python 3.7 之上版本 3 安装依赖 psycopg3 4 安装patroni 5 卸载 patroni 二 安装ETCD 1 使用 yum 安装 etcd 2 etcd 配置文件 3 管理 etcd 4 设置密码 5 常用命令 三 安装…...
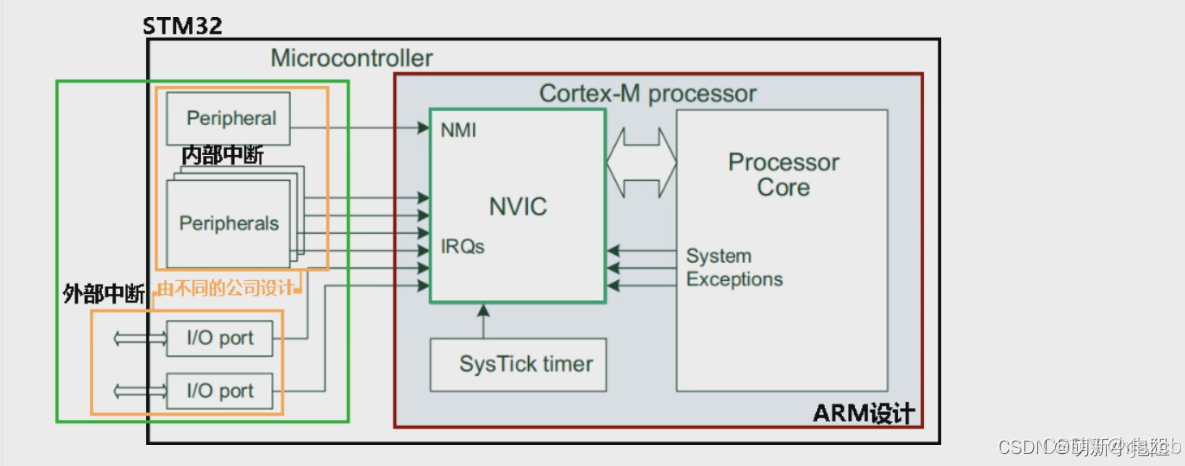
mcu之,armv7架构,contex-M4系列,时钟树,中断,IO架构(一)
写这篇文章的目的,是记录一下arm架构的32mcu,方便记忆芯片架构原理,方便我展开对,BootLoader的研究。 arm架构,时钟树,先做个记录,有空写。...
)
论文解析:基于区块链的去中心化服务选择,用于QoS感知的云制造(四区)
目录 论文解析:基于区块链的去中心化服务选择,用于QoS感知的云制造(四区) 基于区块链的去中心化云制造服务选择方法 一、核心内容概述 二、核心创新点及原理与理论 三、实验与理论分析 PBFT(实用拜占庭容错) 论文解析:基于区块链的去中心化服务选择,用于QoS感知的…...
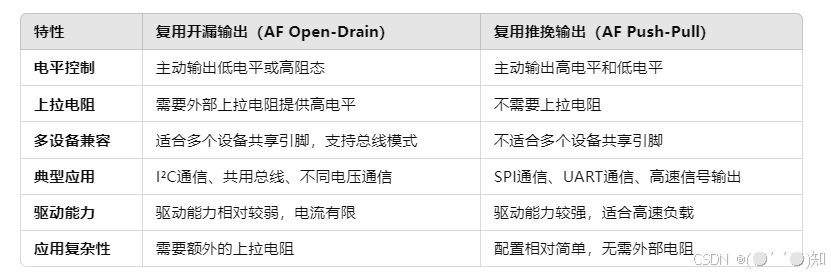
详细解析STM32 GPIO引脚的8种模式
目录 一、输入浮空(Floating Input):GPIO引脚不连接任何上拉或下拉电阻,处于高阻态 1.浮空输入的定义 2.浮空输入的特点 3.浮空输入的应用场景 4.浮空输入的缺点 5.典型配置方式 6.注意事项 二、输入上拉(Inpu…...
【hacker送书第16期】Python数据分析、挖掘与可视化、AI全能助手ChatGPT职场工作效率提升技巧与案例
解锁数据分析与AI应用的双重秘密:全面推广《Python数据分析、挖掘与可视化从入门到精通》与《AI全能助手ChatGPT职场工作效率提升技巧与案例》 前言Python数据分析、挖掘与可视化从入门到精通💕内容简介获取方式 AI全能助手ChatGPT职场工作效率提升技巧与…...
翼鸥教育:从OceanBase V3.1.4 到 V4.2.1,8套核心集群升级实践
引言:自2021年起,翼鸥教育便开始应用OceanBase社区版,两年间,先后部署了总计12套生产集群,其中核心集群占比超过四分之三,所承载的数据量已突破30TB。自2022年10月,OceanBase 社区发布了4.2.x 版…...

WebGIS开发中不同坐标系坐标转换问题
在 JavaScript 中,使用 proj4 库进行坐标系转换是一个非常常见的操作。proj4 是一个支持多种坐标系的 JavaScript 库,提供了从一种坐标系到另一种坐标系的转换功能。 以下是使用 proj4 进行坐标系转换的基本步骤: 1. 安装 proj4 你可以通过…...

AI Agent在智能风控中的实战:多智能体欺诈检测与预警
AI Agent在智能风控中的实战:多智能体欺诈检测与预警 你有没有过明明是正常交易却被银行冻结账户的糟糕体验?或是听说过某电商平台上线新活动首日就被黑产团伙薅走数千万补贴的新闻?随着黑产欺诈向团伙化、专业化、动态化演进,传统依赖规则引擎、单模型机器学习的风控体系已…...

从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤
从‘文件夹’到对象列表:手把手教你用MinIO Java Client实现灵活的文件查询与过滤在当今数据驱动的时代,对象存储已成为现代应用架构中不可或缺的一部分。MinIO作为高性能、兼容S3协议的开源对象存储解决方案,凭借其轻量级和易用性赢得了众多…...
到底在‘看’什么?)
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?想象一下,你刚搬到一个新社区,想快速了解周围的邻居。最直接的方式是什么?不是挨家挨户敲门,而是通过社区活动认识几位关…...

三十岁想从零转行现实吗?带你分辨真正有前景的好工作
我是29岁那年,完成从转行裸辞副业的职业转型。 如果你把职业生涯看成是从现在开始30岁,到你退休那年,中间这么漫长的30年,那么30岁转行完全来得及…...

解决Claude Code访问不稳定与Token不足的痛点
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code访问不稳定与Token不足的痛点 许多开发者将Claude Code作为日常编程的得力助手,用于代码生成、问题调试…...

解决Claude Code Token不足问题并享受Taotoken活动价
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code Token不足问题并享受Taotoken活动价 应用场景类,聚焦于使用Claude Code时遇到Token配额紧张的开发者&…...

LVGL多页面开发避坑:用内部Timer替代轮询,解决页面切换时的内存踩踏问题
LVGL多页面开发中的内存安全实践:用Timer机制替代轮询的工程解决方案 在嵌入式UI开发中,LVGL因其轻量级和跨平台特性成为热门选择。但当项目复杂度提升到多页面交互时,开发者往往会遇到一个棘手问题:如何在频繁切换页面的同时保证…...

UE5项目打包后RenderTarget导出图片全黑?手把手教你解决伽马校正与资产打包问题
UE5打包后RenderTarget导出图片全黑的终极解决方案当你花了整整三天时间调试RenderTarget导出功能,终于在编辑器里看到完美的截图效果,却在打包成可执行文件后发现所有导出的图片都变成了一片漆黑——这种从云端跌入谷底的感觉,每个UE开发者都…...

3步零基础掌握星露谷物语SMAPI模组加载器:高效管理你的模组世界
3步零基础掌握星露谷物语SMAPI模组加载器:高效管理你的模组世界 【免费下载链接】SMAPI The modding API for Stardew Valley. 项目地址: https://gitcode.com/gh_mirrors/smap/SMAPI SMAPI(Stardew Valley Modding API)是星露谷物语官…...

抖音批量下载助手:一键构建你的专属视频素材库
抖音批量下载助手:一键构建你的专属视频素材库 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为手动保存抖音视频而烦恼吗?想要批量获取心仪创作者的精彩内容却无从下手&#x…...