杰发科技AC7801——ADC定时器触发的简单使用
使用场景
在需要多次采样结果的情况下,比如1s需要10w次的采样结果,可以考虑使用定时器触发采样,定时器设置多少的时间就会多久采样转换一次。
再加上使用dma,采样的结果直接放在dma的数组里面。
实现了自动采样,自动保存,使用非常方便。
需要用到CTU模块



代码如下
代码不是很完整 可以参考sample里面adc的定时器触发代码

/*********<Variable>********/
uint8_t g_dmaFinish = 0;//DMA传输完成
uint8_t g_halfDmaFinish = 0; //DMA传输半完成
uint8_t g_dmaTransError = 0; //DMA传输错误
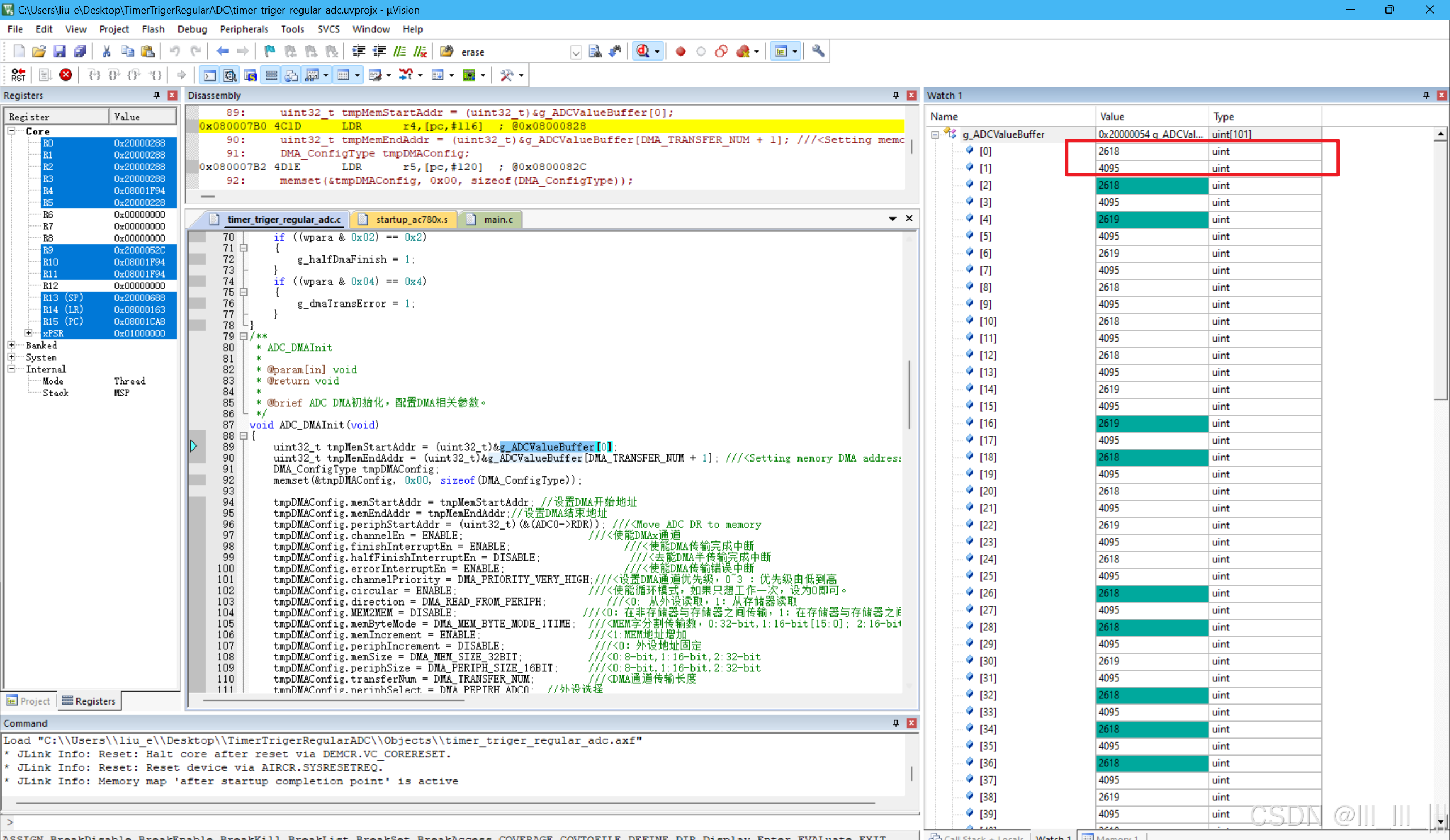
uint32_t g_ADCValueBuffer[DMA_TRANSFER_NUM + 1] = {0};
uint32_t g_timerCnt = 0;
uint32_t g_averageSampleValue = 0;#define Delay50us (APB_BUS_FREQ/2000-1)
#define Delay5ms (APB_BUS_FREQ/200-1)
#define Delay1s (APB_BUS_FREQ-1)
#define DMA_TRANSFER_NUM 100void ADC_DMACallback(void *device, uint32_t wpara, uint32_t lpara)
{/*wparam为DMA通道状态,状态含义可参考CHANNELx_STATUS寄存器,CHANNELx_STATUS[2] 传输错误CHANNELx_STATUS[1] 半传输完成(相对设置的transferNum,如果半传输中断有使能,transferNum设为6,则DATA_TRANS_NUM为3时产生中断,进入回调)CHANNELx_STATUS[0] 传输完成*/if ((wpara & 0x01) == 0x1){g_dmaFinish = 1;}if ((wpara & 0x02) == 0x2){g_halfDmaFinish = 1;}if ((wpara & 0x04) == 0x4){g_dmaTransError = 1;}
}void ADC_DMAInit(void)
{uint32_t tmpMemStartAddr = (uint32_t)&g_ADCValueBuffer[0];uint32_t tmpMemEndAddr = (uint32_t)&g_ADCValueBuffer[DMA_TRANSFER_NUM + 1]; ///<Setting memory DMA addressDMA_ConfigType tmpDMAConfig;memset(&tmpDMAConfig, 0x00, sizeof(DMA_ConfigType));tmpDMAConfig.memStartAddr = tmpMemStartAddr; //设置DMA开始地址tmpDMAConfig.memEndAddr = tmpMemEndAddr;//设置DMA结束地址tmpDMAConfig.periphStartAddr = (uint32_t)(&(ADC0->RDR)); ///<Move ADC DR to memorytmpDMAConfig.channelEn = ENABLE; ///<使能DMAx通道tmpDMAConfig.finishInterruptEn = ENABLE; ///<使能DMA传输完成中断tmpDMAConfig.halfFinishInterruptEn = DISABLE; ///<去能DMA半传输完成中断tmpDMAConfig.errorInterruptEn = ENABLE; ///<使能DMA传输错误中断tmpDMAConfig.channelPriority = DMA_PRIORITY_VERY_HIGH;///<设置DMA通道优先级,0~3 :优先级由低到高tmpDMAConfig.circular = ENABLE; ///<使能循环模式,如果只想工作一次,设为0即可。tmpDMAConfig.direction = DMA_READ_FROM_PERIPH; ///<0: 从外设读取,1:从存储器读取tmpDMAConfig.MEM2MEM = DISABLE; ///<0:在非存储器与存储器之间传输,1:在存储器与存储器之间传输tmpDMAConfig.memByteMode = DMA_MEM_BYTE_MODE_1TIME; ///<MEM字分割传输数,0:32-bit,1:16-bit[15:0]; 2:16-bit[23:16][7:0];3:8-bit。详情可参考AC781X芯片手册 表20-2 可编程数据宽度&数据对齐 tmpDMAConfig.memIncrement = ENABLE; ///<1:MEM地址增加tmpDMAConfig.periphIncrement = DISABLE; ///<0:外设地址固定tmpDMAConfig.memSize = DMA_MEM_SIZE_32BIT; ///<0:8-bit,1:16-bit,2:32-bittmpDMAConfig.periphSize = DMA_PERIPH_SIZE_16BIT; ///<0:8-bit,1:16-bit,2:32-bittmpDMAConfig.transferNum = DMA_TRANSFER_NUM; ///<DMA通道传输长度tmpDMAConfig.periphSelect = DMA_PEPIRH_ADC0; //外设选择tmpDMAConfig.callBack = ADC_DMACallback; ///<设置DMA中断回调DMA_Init(DMA0_CHANNEL0, &tmpDMAConfig); ///<ADC 使用DMA1通道,每个模块对应的DMA通道,可参考 AC781X芯片手册 表20-1 DMA请求列表NVIC_EnableIRQ(DMA0_CHANNEL0_IRQn); ///<使能DMA1中断请求
}
/*** CTU_Config** @param[in] void* @return void** @brief 配置CTU模块,Timer0触发ADC规则组采样。*/
void CTU_Config(void)
{CTU_ConfigType ctuConfig;memset(&ctuConfig, 0x00, sizeof(ctuConfig));ctuConfig.uart0RxFilterEn = DISABLE; //去能UART0_RX滤波ctuConfig.rtcCaptureEn = DISABLE; //去能RTC捕获ctuConfig.acmpCaptureEn = DISABLE; //去能ACMP捕获ctuConfig.uart0RxCaptureEn = DISABLE; //去能UART0_RX捕获ctuConfig.uartTxModulateEn = DISABLE; //去能UART0_TX调制ctuConfig.clkPsc = CTU_CLK_PRESCALER_1; //分频ctuConfig.adcRegularTriggerSource = CTU_TRIGGER_ADC_TIMER_CH0_OVERFLOW; //Timer0触发ADC规则组采样。ctuConfig.delay0Time = 0; //触发延迟CTU_Init(&ctuConfig);
}void TIMER_Callback(void *device, uint32_t wpara, uint32_t lpara)
{if (TIMER_CHANNEL0 == device){g_timerCnt++;}
}void TIMER0_Init(void)
{TIMER_ConfigType timerConfig = {0};timerConfig.periodValue = Delay50us;//5ms定时timerConfig.interruptEn = ENABLE;//使能中断timerConfig.linkModeEn = DISABLE;//级联模式去能timerConfig.callBack = TIMER_Callback;//设置中断回调函数timerConfig.timerEn = ENABLE;//使能定时器TIMER_Init(TIMER_CHANNEL0, &timerConfig);
}void ADC_init()
{ADC_ConfigType tempAdcConfig;ADC_ConfigType* adcConfig;adcConfig = &tempAdcConfig;//配置PINMUXGPIO_SetFunc(GPIOA, GPIO_PIN2, GPIO_FUN2);///<ADC_IN8 Analog function enableGPIO_SetFunc(GPIOA, GPIO_PIN8, GPIO_FUN2);///<ADC_IN8 Analog function enableadcConfig->clkPsc = ADC_CLK_PRESCALER_1; ///<Set ADC Clk = 24M/2/(0+1)adcConfig->scanModeEn = ENABLE; //扫描模式adcConfig->continousModeEn = DISABLE; //连续模式adcConfig->regularDiscontinousModeEn = DISABLE; //1:打开规则组间断转换模式adcConfig->injectDiscontinousModeEn = DISABLE; //1:打开注入组间断转换模式adcConfig->injectAutoModeEn = DISABLE; //1:自动注入模式adcConfig->intervalModeEn = DISABLE; //1:注入组为间隔转换模式adcConfig->regularDiscontinousNum = 0; //adcConfig->EOCInterruptEn = DISABLE; //EOC中断去能adcConfig->IEOCInterruptEn = DISABLE; //IEOC中断去能adcConfig->interruptEn = DISABLE; //去能中断adcConfig->regularDMAEn = ENABLE; //使能ADC DMAadcConfig->regularTriggerMode = ADC_TRIGGER_EXTERNAL;//ADC触发源,外部触发adcConfig->injectTriggerMode = ADC_TRIGGER_INTERNAL; //ADC触发源,内部触发adcConfig->regularSequenceLength = 2; //规则组长度设为1adcConfig->injectSequenceLength = 0; //注入组长度设为0adcConfig->dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐adcConfig->powerMode = ADC_POWER_ON; //上电ADC_Init(ADC0, adcConfig); ///<ADC works Mode Config/*ADC转换率计算公式:转换时间= 采样时间+转换时间+同步时间转换时间= (SPT+12)/ADC模块时钟频率+5/APB时钟频率备注:1.同步时间为5个APB CLK。2.ADC时钟频率 = APB时钟频率 /(分频系数+1)*///ADC_SetRegularGroupChannel(ADC0, ADC_CH_8, ADC_SPT_CLK_7, 0); //采样&转换时间= (7+12)/24000000 + 5/24000000 = 1usADC_SetRegularGroupChannel(ADC0, ADC_CH_8, ADC_SPT_CLK_64, 0); //采样&转换时间= (7+12)/24000000 + 5/24000000 = 1usADC_SetRegularGroupChannel(ADC0, ADC_CH_3, ADC_SPT_CLK_64, 1); //采样&转换时间= (7+12)/24000000 + 5/24000000 = 1usADC_DMAInit(); //ADC DMA初始化
}void sampleValueDeal(void)
{int i;uint32_t sumValue = 0;for (i = 0; i < DMA_TRANSFER_NUM; i++){sumValue += g_ADCValueBuffer[i];}g_averageSampleValue = sumValue / DMA_TRANSFER_NUM;}void ADC_SampleTimerTrigerRegular(void)
{CTU_Config();ADC_init();TIMER0_Init();///<开始ADC规则组转换,转换值根据规则组通道顺序存储在g_ADCValueBuffer数组中。while(1){//nothing todo mdelay(500);sampleValueDeal();printf("Timer Triger ADC Regular Sample value: %d\r\n", g_averageSampleValue);}
}/**********<End>*********/
采样频率用这个时间来控制

需要用到CTU模块来连接定时器和ADC'

需要多个ADC通道在这里添加,注意修改规则组长度

DMA的配置用示例的就行

配置了2个通道的时候,采样的结果会按照顺序存储在DMA数组里面
相关文章:
杰发科技AC7801——ADC定时器触发的简单使用
使用场景 在需要多次采样结果的情况下,比如1s需要10w次的采样结果,可以考虑使用定时器触发采样,定时器设置多少的时间就会多久采样转换一次。 再加上使用dma,采样的结果直接放在dma的数组里面。 实现了自动采样,自动…...
VTK知识学习(8)-坐标系统
1、概述 计算机图形学里常用的坐标系统有4种: 1)、Model坐标系统。定义模型时所采用的坐标系统,通常是局部的笛卡儿坐标系。 2)、World坐标系统。是放置Actor的三维空间坐标系。 Actor(vtkActor类&am…...
IO流部分串讲
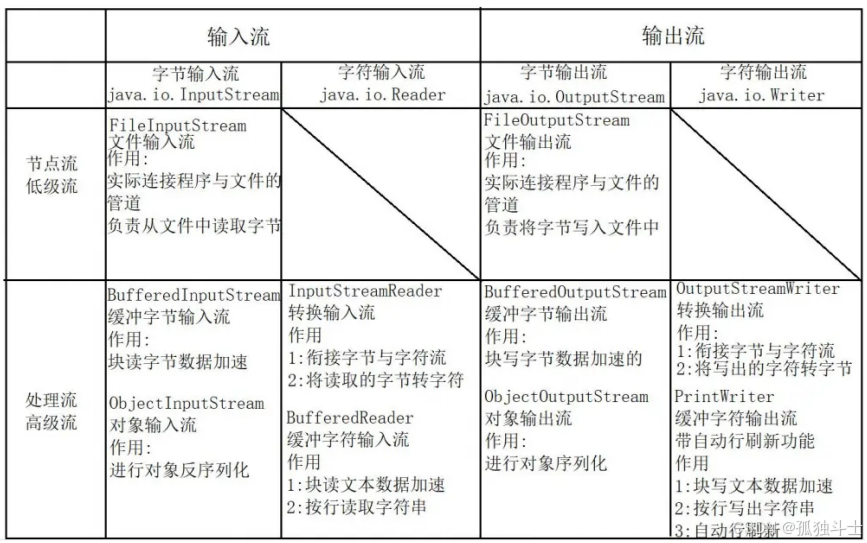
一、IO流的概念简析: java将输入与输出比喻为"流",英文:Stream. 就像生活中的"电流","水流"一样,它是以同一个方向顺序移动的过程.只不过这里流动的是字节(2进制数据).所以在IO中有输入流和输出流之分,我们理解他们是连接…...
)
Excel——宏教程(2)
Excel——宏教程(2) 一)、处理单元格 1、直接赋值与引用 将变量、常量值直接赋给单元格、或将单元格的值直接赋给变量、常量,这是在excel中最简单的单元格赋值及引用方法。 如下例将工作表"Sheet1"A1单元格的值赋给Integer变量I,并将I1的值…...
unity 中 RectTransform 的常用几个属性
RectTransform rectTransform this.GetComponent<RectTransform>(); rectTransform this.transform as RectTransform; Vector3 vector1 rectTransform.position; //自身轴心点相对于锚点的位置(编译器显示的pos) …...
项目-摄像
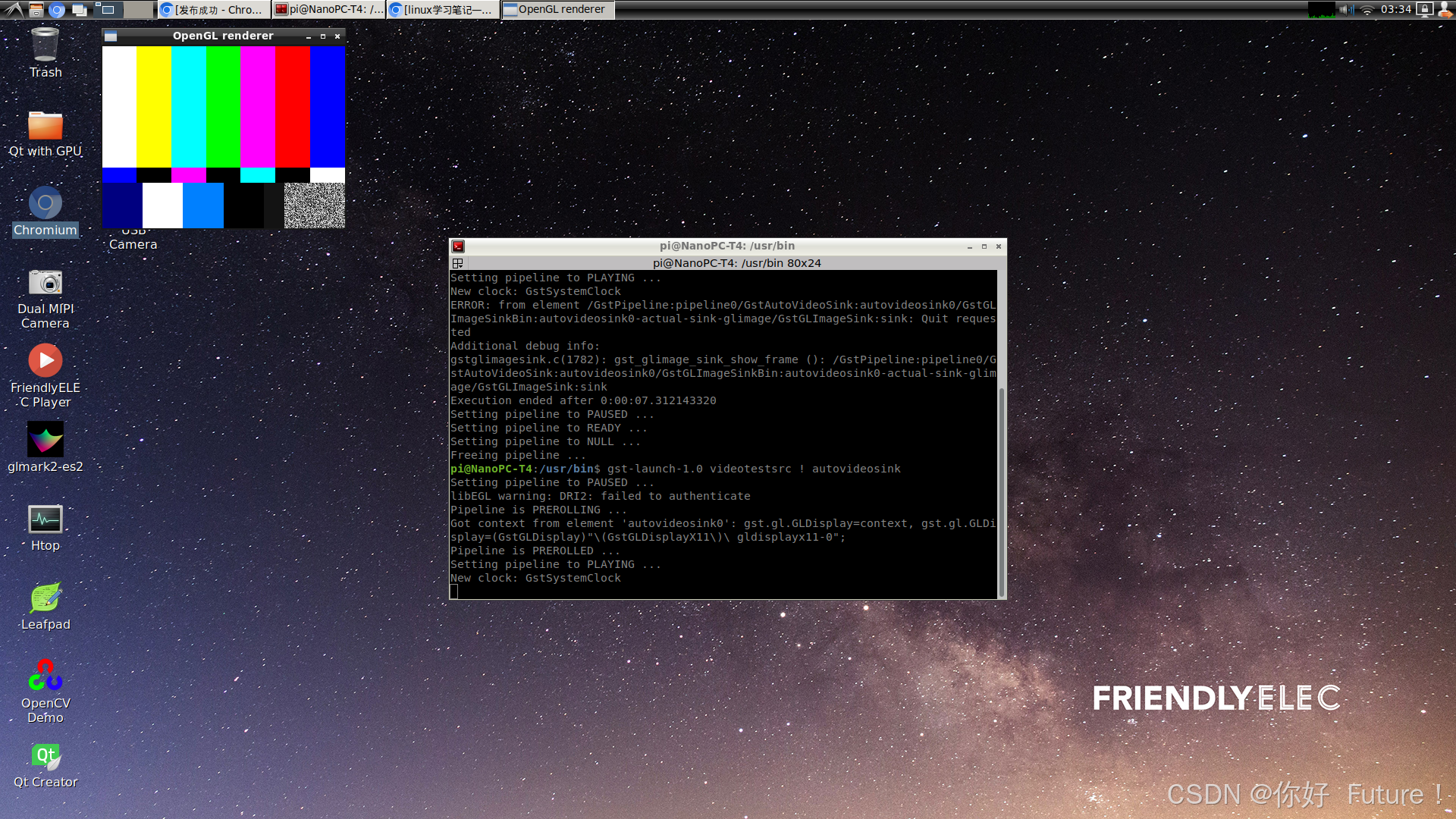
树莓派摄像头使用方法 Camera教程 https://www.raspi.cc/index.php?cread&id53&page1 nanopc-t4 https://www.raspi.cc/index.php?cread&id53&page1 摄像头型号 Raspberry Pi Camera Rev 1.3 检测故障 dmesg | grep -i mipi piNanoPC-T4:~$ dmesg | …...

摄像机ISP和DSP的区别?
影像处理器是现代数字相机、手机等电子设备中极其重要的一部分,它能够对传感器采集的图像进行多种操作,从而得到更高质量的图像。常见的两种影像处理芯片有ISP(Image Signal Processor)和DSP(Digital Signal Processor…...
Ubuntu24安装配置NDK
1、下载NDK 下载压缩包,下载地址如下,建议下载LTS支持版本。 https://developer.android.google.cn/ndk/downloads?hlcs 2、解压缩 将NDK解压到指定文件夹。如:/opt 或者先解压,再移动到指定目录下。 3、配置环境变量 找到…...

【Next】中间件
概述 Next.js 的 中间件 (Middleware) 是一种在请求完成之前运行的函数,用于对入站请求进行处理和操作。它可以在路由匹配前执行逻辑,用于身份验证、请求重写、重定向、设置响应头等任务。 使用场景 身份验证:在用户访问页面前检查登录状态…...
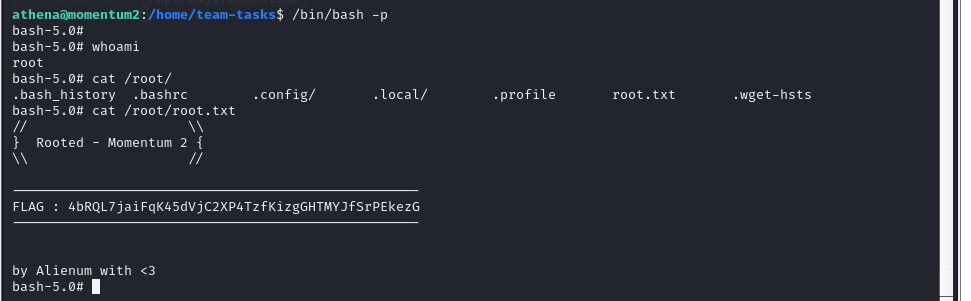
Vulnhub靶场案例渗透[11]- Momentum2
文章目录 一、靶场搭建1. 靶场描述2. 下载靶机环境3. 靶场搭建 二、渗透靶场1. 确定靶机IP2. 探测靶场开放端口及对应服务3. 扫描网络目录结构4. 代码审计5. 反弹shell6. 提权 一、靶场搭建 1. 靶场描述 - Difficulty : medium - Keywords : curl, bash, code reviewThis wor…...

STM32设计防丢防摔智能行李箱-分享
目录 目录 前言 一、本设计主要实现哪些很“开门”功能? 二、电路设计原理图 1.电路图采用Altium Designer进行设计: 2.实物展示图片 三、程序源代码设计 四、获取资料内容 前言 随着科技的不断发展,嵌入式系统、物联网技术、智能设备…...

Vue Mixin混入机制
在 Vue.js 中,Mixin(混入)是一种可复用代码的机制,用于在多个组件之间共享逻辑。通过混入,可以将通用功能提取到一个独立的文件中,然后在组件中引入并使用,而无需重复代码。 基本概念 Mixin 是…...

数据库类型建表
接着上次的数据库笔记: 初始数据库 (是博主自己写的) 1.数据库类型 1.1数值类型 数据类型大小说明对应JAVA类型BIT[(M)]M指定位数,默认值为1二进制数,M的范围从1—64,存储数值范围从0—2^M-1常用Bool…...

iOS 18 导航栏插入动画会导致背景短暂变白的解决
问题现象 在最新的 iOS 18 系统中,如果我们执行导航栏的插入动画,可能会造成导航栏背景短暂地变为白色: 如上图所示:我们分别向主视图和 Sheet 弹出视图的导航栏插入了消息,并应用了动画效果。可以看到,前者的导航栏背景会在消息插入那一霎那“变白”,而后者则没有任何…...

深度学习之人脸检测
在目标检测领域可以划分为了人脸检测与通用目标检测,往往人脸这方面会有专门的算法(包括人脸检测、人脸识别、人脸其他属性的识别等等),并且和通用目标检测(识别)会有一定的差别,着主要来源于人…...

解决前后端发版本时候,手动清除浏览器缓存
在.html页面中添加标签 后端配置nginx,让index.html不缓存 location /index.html { add_header Cache-Control “no-cache, no-store”; }在vite.config.ts中添加 rollupOpyions: { output: { // 输出编译后的文件名称:【文件名称.时间戳】、【文件名称.版本号.…...

mysql8.4+mysql router读写分离
以下为容器环境内搭建 准备工作: 拉取镜像: 镜像版本mysql8.4container-registry.oracle.com/mysql/community-router8.4 下载mysql_shell mysql-shell-9.0.1-linux-glibc2.17-x86-64bit.tar.gz 下载地址: https://downloads.mysql.com/archives/shell/ 参考 这里对这篇文章…...
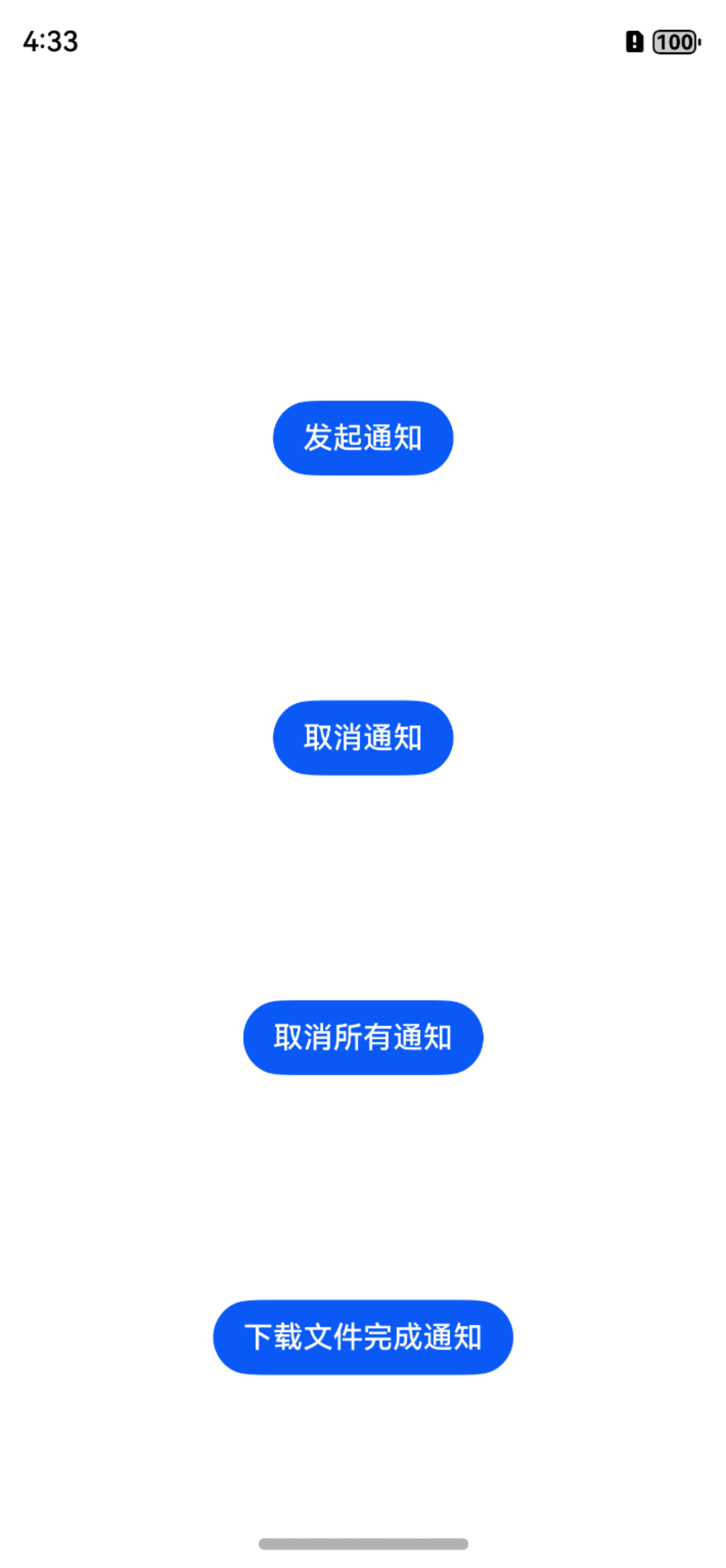
鸿蒙NEXT开发-用户通知服务的封装和文件下载通知
注意:博主有个鸿蒙专栏,里面从上到下有关于鸿蒙next的教学文档,大家感兴趣可以学习下 如果大家觉得博主文章写的好的话,可以点下关注,博主会一直更新鸿蒙next相关知识 专栏地址: https://blog.csdn.net/qq_56760790/…...

RHCE——系统的延迟任务及定时任务
延迟任务的发起 在系统中我们可以使用 at 命令来发起延迟任务 at 命令执行是调用的是 atd 服务,即使系统最小化安装 atd 也会被安装到系统中 at 任务信息存放在系统中 /var/spool/at 目录中 at 任务的日志文件被存放到 /var/log/cron 中 at 任务执行时如果遇…...
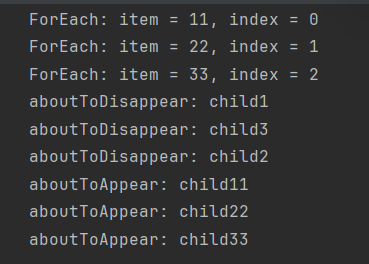
ForEach刷新UI机制
官网地址:ForEach 在ArkUI中,提供了ForEach循环语句,用来初始化一个列表数据,我们知道,当ForEach中的数组发生变化时,会引起UI的刷新,但是究竟如何变化,会引起UI怎样的刷新…...

OpenClaw配置备份指南:Qwen3-4B模型参数迁移方案
OpenClaw配置备份指南:Qwen3-4B模型参数迁移方案 1. 为什么需要配置备份 上周我的主力开发机突然硬盘故障,导致辛苦配置了两个月的OpenClaw环境全部丢失。最痛苦的不是重装软件,而是那些精心调试的模型参数、飞书机器人凭证和自定义技能配置…...

SecGPT-14B模型蒸馏:打造轻量级OpenClaw安全助手
SecGPT-14B模型蒸馏:打造轻量级OpenClaw安全助手 1. 为什么需要轻量级安全助手? 去年在为一个金融客户部署自动化安全监控系统时,我遇到了一个典型困境:他们的边缘设备只能提供4GB内存和2核CPU的算力,但SecGPT-14B这…...

Arduino模拟输入校准库:软件定义ADC精度提升方案
1. AnalogInput 库概述AnalogInput 是一个专为 Arduino 平台设计的轻量级模拟输入信号处理库,其核心工程目标是在资源受限的微控制器上实现高鲁棒性的自动校准与稳定采样。不同于 Arduino 原生analogRead()的裸调用方式,该库通过软件层面的系统性补偿机制…...

RK Android14 开机自启APP分析与使用
文章目录 前言 一、功能补丁 二、如何使用 1. 应用补丁 2. 设置自启动应用 3. 获取应用包名和Activity 4. 验证 总结 前言 根据客户需要,有时需要设置第三方的apk进行开机自启动。 一、功能补丁 功能分析: 系统启动完成后,自动启动系统属性 persist.sys.start.app 中配置的…...
)
仅用200行代码重构内存管理模块:某AI平台将GPU服务器月成本压至$1,840的独家策略(限时开源)
第一章:Python 智能体内存管理策略Python 的内存管理并非由开发者直接操控,而是由解释器内置的智能体协同完成——包括引用计数、循环垃圾回收器(GC)和内存池机制三者构成动态平衡系统。这一“智能体”在运行时持续感知对象生命周…...

新手福音:在快马平台用一句话描述,AI帮你生成专属技能展示网页代码
作为一个刚入门编程的新手,想要展示自己的技能却无从下手?最近我发现了一个超级友好的工具,完全是为我们这种小白量身定做的。只需要简单描述需求,就能自动生成一个完整的个人技能展示网页项目,而且所有代码都带着详细…...
)
手把手教你用Matlab/Simulink实现PMSM FOC控制(附SVPWM算法代码)
从零构建PMSM磁场定向控制:Matlab/Simulink实战指南 在工业驱动和电动汽车领域,永磁同步电机(PMSM)凭借其高功率密度和卓越效率成为首选。而磁场定向控制(FOC)作为当前最先进的电机控制策略,能实…...

SoftSPIB:支持任意位宽的软件模拟SPI库
1. SoftSPIB:面向非字节对齐SPI通信的软件实现方案1.1 问题起源:硬件SPI的固有局限性在嵌入式系统开发中,SPI(Serial Peripheral Interface)作为最常用的同步串行总线协议,其标准实现通常以8位(…...
)
TM1620驱动数码管的8个常见坑点及解决方案(基于STM32实战)
TM1620驱动数码管的8个常见坑点及解决方案(基于STM32实战) 当你在STM32项目中使用TM1620驱动数码管时,可能会遇到各种令人头疼的问题。本文将深入探讨8个最常见的坑点,并提供经过实战验证的解决方案,帮助开发者快速定位…...

Prompt工程进阶:6个技巧提升大模型输出精准度
Prompt工程进阶:6个技巧提升大模型输出精准度 随着大语言模型在代码生成、内容创作、数据分析等场景的渗透率持续提升,开发者和从业者逐渐发现,通用Prompt往往只能得到模糊、冗余甚至偏离需求的输出。如何通过精细化的Prompt设计,…...