Simulink学习笔记【PID UG联动仿真】
Simulink进行PID控制及调参:
- 建立系统动力学框图(把状态方程翻译出来),设置成subsystem
- 建立PID反馈回路。示波器叫scope,多变量输出用demux和mux。
- 可以用自动调参Tune模块,调整响应速度和稳定性,达到较优状态,更新参数并重新run
- 或者可以使用内置的状态空间法建立动力学模型:用状态方程模块State-Space,直接输入ABCD及初值矩阵即可
- 可以添加多个PID控制:PID是对y(t)的偏差值进行计算处理,得到u(t)的新数值。PID本身的阶跃响应曲线(响应速度、稳定性)一定程度上反应了实际系统的响应特征,因为冲激函数的卷积是阶跃函数。因此,多个PID控制的话需要先把各自PID的结果相加,然后再输入到系统状态方程里面(作为输入u)。
- 可以在3s加入一个转角的小扰动,用Step函数*2+作差处理,制造冲激信号。这样可以看到两个PID分别发挥作用。
- 想要导出数据重新作图,把mux的数据连线到out模块,运行,回到matlab里面看工作区,有out表格,tout是时间,yout是研究的变量,value里面有四列,位移,速度,角度,角加速度。
Simulink & UG联动仿真:
步骤总述:
- 在UG里面建立机械系统模型。
- 确定系统输入和输出,UG里面的输出是Simulink的输入,反之亦然,总之要建立UG和Simulink的闭合回路。注意:工厂输出是UG到Simulink,工厂输入是Simulink到UG,这两个概念都是在UG里面定义的,所以以UG为参考。
- 在Simulink建立控制系统框图,把动力学模块用UG模块替代;
- 进行联合仿真分析。
详细步骤:
- 在UG里面关联MATLAB。用户默认设置,仿真,运动,分析,右边选RecurDyn求解器,控制/动力学模块下,采样时间0.001,MATLAB可执行文件选择电脑中matlab的安装地址exe,Windows那行里面填好。
- UG里面导入模型,打开prt文件。(剩下的操作和之前类似,打开运动导航器,新建仿真……)
- 设置仿真环境,RecurDyn结算方案选“协同仿真”。注意,设置之前需要先右键左侧菜单的模型(step上面的一行),修改求解器为RecurDyn求解器。
- 跟之前一样,建立连杆和运动副。RecurDyn会自动给固定连杆建固定副的,不用自己设置。注意滑块滑动副可以把全局坐标系的坐标原点设置成原点。转动副可以重点观察一下方位,到底怎么转角度是正值(我觉得可能局部坐标系和全局重合比较方便看)
- 点击菜单(M),插入,工厂,工厂输入。在最上面一行的“加载“里面选择”矢量力“,全局坐标系正方向,指定原点先选择面上的点,确定面的x坐标,再选择”点对话框“,直接设置坐标y和z,放在中心。幅值选择函数,函数管理器,插入,”工厂输入“,Pin001,回去幅值那边把这个函数施加上去。(可以调整显示图例大小,这样才能看到力的箭头,参考之前的笔记)
- 建立传感器*4,测量对象选择滑块的位移(分量z,相对,选择滑块运动副)、速度(分量z,相对,选择滑块运动副)、摆杆运动副的角度(分量RZ,相对,选择旋转副)、角速度(分量RZ,相对,选择旋转副)。
- 插入工厂输出*4,分别将上面4个传感器都定义为工厂输出(每个传感器一个输出)。
- 添加解算方案,分析类型是控制/动力学,时间30s,步数1000步,重力对摆杆运动很重要所以要加上。保存。
- 对模型求解,协同仿真选Simulink。目前还没有结果。
- 回到文件夹下面,多出来两个m文件Plant和PlantIO。
- 打开Simulink,建立控制框图,和上次建的一样就好(用最简单的一环控制转角)。
- 后续思路是把状态空间模型块替换成UG的模块,输出分别用四个示波器显示就好,角度有一个初始值需要加进去(因为simulink定义的坐标系目标角度是0°,而UG模型本身有一个初始-5°的角度,所以UG模型的目标角度是5°。注意全部用弧度表示!!)。
- 把两个多的m文件在MATLAB打开,运行plant文件,出现了一个运动框图,可以复制粘贴进自己画的控制框图里。
- 绘制好框图后,稍微做一些调整。联动的时候容易出现崩溃的情况,因此插入一个延时函数transport delay,0.001s=1ms,放在PID和UG模块之间,经过延时再输入进来。
- 建立一个示波器,显示PID的结果,也就是驱动力。
- 再来看看PID模块。直接run一下试试(记得把simulink的stop time改成30s和UG一致,但是好像还是不够,还有什么地方也要调……),看结果发现位移是匀速运动(动态平衡),因为只做了一环控制。回到UG可以看动图,在初始的一瞬间就达到了平衡……好吧……
- 修改PID模块参数,可以看不同的效果。
- 双击NX的模块,可以看到我们设置的工厂输入和工厂输出。
- 可以加两环控制。还可以去UG里面直接看运动结果图,更清楚一些。
相关文章:

Simulink学习笔记【PID UG联动仿真】
Simulink进行PID控制及调参: 建立系统动力学框图(把状态方程翻译出来),设置成subsystem建立PID反馈回路。示波器叫scope,多变量输出用demux和mux。可以用自动调参Tune模块,调整响应速度和稳定性࿰…...

【Python】30个Python爬虫的实战项目!!!(附源码)
Python爬虫是数据采集自动化的利器。本文精选了30个实用的Python爬虫项目,从基础到进阶,每个项目都配有完整源码和详细讲解。通过这些项目的实战,可以全面掌握网页数据抓取、反爬处理、并发下载等核心技能。 一、环境准备 在开始爬虫项目前…...

uni-app 界面TabBar中间大图标设置的两种方法
一、前言 最近写基于uni-app 写app项目的时候,底部导航栏 中间有一个固定的大图标,并且没有激活状态。这里记录下实现方案。效果如下(党组织这个图标): 方法一:midButton的使用 官方文档:ta…...

什么是Sass,有什么特点
Sass 概述 什么是 Sass? Sass(Syntactically Awesome Style Sheets)是一种 CSS 预处理器,它扩展了 CSS 的功能,使其更加强大和灵活。Sass 允许开发者使用变量、嵌套规则、混合宏、继承等高级特性,从而编写…...
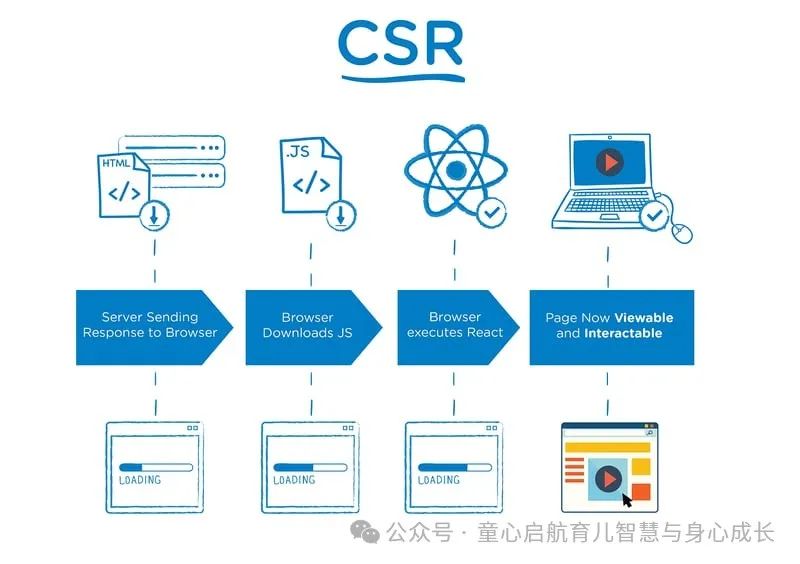
服务器端渲染 (SSR) 与客户端渲染 (CSR)
嘿程序员!我们都知道,新时代的 Javascript 已经彻底改变了现代网站的结构和用户体验。如今,网站的构建更像是一个应用程序,伪装成一个能够发送电子邮件、通知、聊天、购物、支付等的网站。今天的网站是如此先进、互动,…...
数据结构(Java版)第一期:时间复杂度和空间复杂度
目录 一、数据结构的概念 1.1. 什么是数据结构 1.2. 算法与数据结构的关系 二、算法效率 三、时间复杂度 3.1. 大O的渐进表⽰法 3.2. 计算冒泡排序的时间复杂度 3.3. 计算二分查找的时间复杂度 四、空间复杂度 4.1. 空间复杂度 4.2. 冒泡排序的空间复杂度 4.3.…...

基于web的音乐网站(Java+SpringBoot+Mysql)
目录 1系统概述 1.1 研究背景 1.2研究目的 1.3系统设计思想 2相关技术 2.1 MYSQL数据库 2.2 B/S结构 2.3 Spring Boot框架简介 3系统分析 3.1可行性分析 3.1.1技术可行性 3.1.2经济可行性 3.1.3操作可行性 3.2系统性能分析 3.2.1 系统安全性 3.2.2 数据完整性 …...

用go语言后端开发速查
文章目录 一、发送请求和接收请求示例1.1 发送请求1.2 接收请求 二、发送form-data格式的数据示例 用go语言发送请求和接收请求的快速参考 一、发送请求和接收请求示例 1.1 发送请求 package mainimport ("bytes""encoding/json""fmt""ne…...

GeekChallenge 2024 第十五届极客大挑战 pwn AK
GeekChallenge 2024 第十五届极客大挑战 pwn AK 🍀前言☘️ez_shellcode(shellcode,栈溢出)🌿分析🌿解题🌿exp ☘️买黑吗喽了吗(整数溢出,栈溢出)dz…...

禅道是什么,nas是什么,ssh是什么,finalshell是什么,git命令feat 、fix分别什么意思
禅道(Zentao)是一款开源的项目管理软件,专为软件开发团队设计。它集成了项目管理、产品管理、质量管理、文档管理和事务管理等多种功能,旨在帮助团队提高工作效率和项目交付质量。禅道支持敏捷开发方法,同时也适用于传…...

点云-半径搜索法-Radius Search
核心作用 在于通过设定一个空间范围(半径)寻找点的邻域点集合,从而支持对局部区域的分析和操作。 因为空间半径不会随着密度变化而改变点云输出的结果,处理密度变化大的点云时很重要。 应用场景 稀疏点检测:当点云密度…...
P11290 【MX-S6-T2】「KDOI-11」飞船
题目大意:有i种加油站,最开始速度为1,每次加油可以使速度*v,每次加油有一个时间代价,求到达终点所需最小时间。 思路:不妨考虑dp,贪心是错误的。 对于速度而言,,所以速…...

WebGIS地图框架有哪些?
地理信息系统(GIS)已经成为现代应用开发中不可或缺的一部分,尤其在前端开发中。随着Web技术的快速发展,许多强大而灵活的GIS框架涌现出来,为开发人员提供了丰富的工具和功能,使他们能够创建交互式、高性能的…...
)
量化加速知识点(整理中。。。)
量化的基本概念 通过减少模型中计算精度,从而减少模型计算所需要的访存量。 参考...

BLIP-2模型的详解与思考
大模型学习笔记------BLIP-2模型的详解与思考 1、BLIP-2框架概述2、BLIP-2网络结构详解3、BLIP-2的几点思考 上一篇文章上文中讲解了 BLIP(Bootstrapping Language-Image Pretraining)模型的一些思考,本文将讲述一个BLIP的升级版 BLIP-2&am…...
2024年11月22日 十二生肖 今日运势
小运播报:2024年11月22日,星期五,农历十月廿二 (甲辰年乙亥月庚寅日),法定工作日。 红榜生肖:马、猪、狗 需要注意:牛、蛇、猴 喜神方位:西北方 财神方位:…...

小米C++ 面试题及参考答案上(120道面试题覆盖各种类型八股文)
进程和线程的联系和区别 进程是资源分配的基本单位,它拥有自己独立的地址空间、代码段、数据段和堆栈等。线程是进程中的一个执行单元,是 CPU 调度的基本单位。 联系方面,线程是进程的一部分,一个进程可以包含多个线程。它们都用于…...

SQL SELECT 语句:基础与进阶应用
SQL SELECT 语句:基础与进阶应用 SQL(Structured Query Language)是一种用于管理关系数据库的编程语言。在SQL中,SELECT语句是最常用的命令之一,用于从数据库表中检索数据。本文将详细介绍SELECT语句的基础用法&#…...

微服务即时通讯系统的实现(服务端)----(1)
目录 1. 项目介绍和服务器功能设计2. 基础工具安装3. gflags的安装与使用3.1 gflags的介绍3.2 gflags的安装3.3 gflags的认识3.4 gflags的使用 4. gtest的安装与使用4.1 gtest的介绍4.2 gtest的安装4.3 gtest的使用 5 Spdlog日志组件的安装与使用5.1 Spdlog的介绍5.2 Spdlog的安…...

《Spring 依赖注入方式全解析》
一、Spring 依赖注入概述 Spring 依赖注入(Dependency Injection,DI)是一种重要的设计模式,它在 Spring 框架中扮演着关键角色。依赖注入的核心概念是将对象所需的依赖关系由外部容器(通常是 Spring 容器)进…...

App无辜躺枪?手把手教你搞定腾讯手机管家误报导致的应用商店下架
当合规应用遭遇误报下架:开发者系统性应对指南运动健康类应用被标记为金融诈骗软件?社交工具因"病毒风险"被各大商店紧急下架?这类看似荒谬的误报事件,正在成为中小开发团队的"无妄之灾"。某知名运动App开发团…...

Unity主题系统设计:状态驱动的主题抽象与自动注入方案
1. 这不是换个颜色那么简单:为什么Unity项目里“换肤”总在发布前夜崩盘?你有没有经历过这样的场景:美术同学凌晨两点发来一套新主题资源包,UI设计师说“这次配色更符合品牌调性”,产品说“上线前必须支持深色模式”&a…...

基于PIC32的嵌入式MIDI合成器:从波表合成到硬件实现
1. 项目概述:一个基于嵌入式微控制器的MIDI声音合成器如果你对电子音乐制作、嵌入式开发,或者DIY硬件合成器感兴趣,那么“REMI Synth”这个项目绝对值得你花时间深入了解。它本质上是一个数字单音MIDI控制的声音合成器,核心是一块…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...

机器学习的最佳实践:这7个原则让你的模型更稳定
对于软件测试从业者而言,机器学习技术正在快速融入测试流程:从自动化测试用例生成、缺陷预测到测试环境异常检测,机器学习模型的稳定性直接决定了测试结果的可靠性——如果模型在测试环境波动、输入数据变化时性能骤降,不仅无法提…...

自动加字幕软件推荐:口播视频如何批量加字幕过
口播视频加字幕,为什么越做越累?一位知识类博主连续两周日更3条口播视频,每条12–18分钟,需手动校对字幕、拆分金句切片、补气口停顿、匹配背景音乐——最后一条视频发布时,字幕错漏率达17%,平台审核未过。…...

如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器
如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 还在为想和朋友一起玩游戏却只有一台电脑而烦…...

终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧
终极指南:5步掌握Cursor AI Pro完整功能免费解锁技巧 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

Armv9-A架构解析:SVE/SME与安全增强技术
1. Armv9-A架构演进与核心特性全景Armv9-A架构代表了Arm公司面向未来十年计算需求的设计哲学,其核心在于三个维度的突破:性能、安全与专用计算。作为长期从事Arm架构开发的工程师,我见证了从Armv7到Armv9的技术跃迁。与固定宽度向量指令的NEO…...

清华大学学位论文LaTeX模板:30分钟快速排版终极指南
清华大学学位论文LaTeX模板:30分钟快速排版终极指南 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 还在为论文格式烦恼吗?清华大学官方LaTeX模板thuthesis让…...