【深度学习】【RKNN】【C++】模型转化、环境搭建以及模型部署的详细教程
【深度学习】【RKNN】【C++】模型转化、环境搭建以及模型部署的详细教程
提示:博主取舍了很多大佬的博文并亲测有效,分享笔记邀大家共同学习讨论
文章目录
- 【深度学习】【RKNN】【C++】模型转化、环境搭建以及模型部署的详细教程
- 前言
- 模型转换--pytorch转rknn
- pytorch转onnx
- onnx转rknn
- RKNPU2平台搭建依赖环境
- RKNPU2调用rknn模型
- RKNPU2推理核心流程
- RKNPU2推理代码
- 总结
前言
Orangepi RKNN(Rockchip Neural Network)是Rockchip公司推出的一种用于其处理器上的高效神经网络加速技术。它与Rockchip的处理器紧密结合,旨在通过硬件加速提升AI应用的运行效率,特别是在边缘计算设备上,为嵌入式设备和边缘计算场景提供了高性能、低功耗的深度学习解决方案。RKNN Toolkit 和 RKNPU2 是支持RKNN技术的两个重要工具集。RKNN Toolkit 是一套软件开发工具包,提供了模型转换、优化、测试和部署等功能,帮助开发者将训练好的深度学习模型轻松转换为适合Rockchip硬件的格式,以获得最佳性能。而RKNPU2 则是指Rockchip的神经网络处理单元(Neural Processing Unit, NPU)的第二代驱动程序和库文件,它为RKNN Toolkit 提供底层支持,确保了模型能够在Rockchip的硬件上高效地执行。
RKNN Toolkit 和 RKNPU2 是对 Rockchip NPU最原生的支持。
模型转换–pytorch转rknn
博主在RK3566开发板上进行部署演示: 模型转化可以是在Ubuntu环境的主机上或者虚拟机上,但是模型部署必须是在 Orangepi 的开发板子上。
Pytorch 模型转 RKNN 并推理的步骤如下:
- 将 PyTorch 预训练模型文件( .pth 或 .pt 格式)转换成 ONNX 格式的文件(.onnx格式),这一转换过程在 PyTorch 环境中进行。
- 将转换得到的 .onnx 文件再次转换成 .rknn 格式的文件,这一转换过程需要在安装有转换工具 rknn-toolkit2 的Ubuntu系统上运行。这里博主建议在 docker 的 Ubuntu 虚拟机上进行。
- 将转换得到的 .rknn 文件随后作为输入,在 RKNN 平台上调用 RKNPU2 的 C++ API 来执行模型的推理。
pytorch转onnx
博主使用AlexNet图像分类(五种花分类)进行演示,需要安装pytorch环境,对于该算法的基础知识,可以参考博主【AlexNet模型算法Pytorch版本详解】博文。
conda create --name AlexNet python==3.10
conda activate AlexNet
# 根据自己主机配置环境
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
# 假设模型转化出错则降级为指定1.16.1版本
pip install onnx==1.16.1
然后把训练模型好的AlexNet.pth模型转成AlexNet.onnx模型,pyorch2onnx.py转换代码如下:
【AlexNet.pth百度云链接,提取码:ktq5 】直接下载使用即可。
import torch
from model import AlexNet
model = AlexNet(num_classes=5)
weights_path = "./AlexNet.pth"
# 加载模型权重
model.load_state_dict(torch.load(weights_path))
# 模型推理模式
model.eval()
model.cpu()
# 虚拟输入数据
dummy_input1 = torch.randn(1, 3, 224, 224)
# 模型转化函数
torch.onnx.export(model, (dummy_input1), "AlexNet.onnx", verbose=True, opset_version=11)

onnx转rknn
【平台:x64 架构 windoes11 docker虚拟机 Ubuntu 系统】
1.安装dockers【参考】: Windows11系统下安装并配置阿里云镜像加速,并完成启动。

2.下载 RKNN Toolkit 转换工具【githup下载】: 博主这里没有下载master分支,而是下载 rknn-toolkit2-v1.5.2分支。

3.搭建docker镜像: 在doc/Rockchip_Quick_Start_RKNN_SDK_V1.5.2_CN.pdf中,博主参考该官方文档详细介绍如何构建docker的Ubuntu容器并安装转换工具 rknn-toolkit2,以及其详细的使用方式。

【docker常用指令】
Dockerfile文件构建镜像镜像(不推荐):经常出现 failed with status code [manifests 18.04]: 403 Forbidden 的错误,博主暂时没有解决方案。
# 进入docker配置文件目录
cd XXX\rknn-toolkit2-1.x.x\docker\docker_file\ubuntu_xx_xx_cpxx
# eg: cd C:\Users\AYU\Downloads\rknn-toolkit2-1.5.2\docker\docker_file\ubuntu_18_04_cp36# 查询配资文件
ls
# 出现三个文件分别是:
# 1.Dockerfile_ubuntu_18_04_for_cp36:特定 Dockerfile,用于创建一个基于Ubuntu 18.04的Docker镜像,专门针对Python3.6(cp36)进行配置.
# 2.rknn_toolkit2-1.5.2+b642f30c-cp36-cp36m-linux_x86_64.whl:针对Linux x86_64架构的rknn-toolkit2 Python(wheel )安装包,支持Python3.6(cp36).
# 3.sources_bionic.list: APT源列表文件,用于Ubuntu系统中的软件包管理.# 构建 Docker 镜像
# -f 指定Dockerfile文件
# -t 镜像名:标签
docker build -f Dockerfile_ubuntu_xx_xx_for_cpxx -t rknn-toolkit2:x.x.x-cpxx .
# eg:docker build -f Dockerfile_ubuntu_18_04_for_cp36 -t rknn-toolkit2-env:1.5.2-cp36 .
Docker 镜像文件下载(推荐)【官方网盘,提取码:rknn】【个人网盘,提取码:rknn】
因为官方网盘没有保留一些旧版本的docker镜像,因此博主的个人网盘将旧的网盘补充完整了。
# 进入到docker镜像目录,加载镜像
docker load -i XXX\rknn-toolkit2-x.x.x-cpxx-docker.tar.gz
# eg: docker load -i E:\rknn-toolkit2-1.5.2-cp36-docker.tar.gz# 查看安装的镜像
docker images# 创建容器
docker run -it --name rknn_toolkit2_x.x.x_cpxx -d rknn-toolkit2:x.x.x-cpxx
# eg: docker run -it --name rknn_toolkit2_1.5.2_cp36 -d rknn-toolkit2:1.5.2-cp36# 查看运行的容器
docker ps

4.完成模型onnx到rknn的转化: convert_rknn文件拷贝至虚拟机,完成转化过程,并将rknn模型从虚拟机拷贝到主机。

参考下载的rknn-toolkit2-1.5.2\examples\onnx\resnet50v2中的内容
convert_rknn文件包括之前成功转化的AlexNet.onnx模型文件,一张验证图片,一个保存着验证图片相对路径的dataset.txt,以及转化rknn所需的简化版代码convert.py。

convert.py内容如下:
import os
import urllib
import traceback
import time
import sys
import numpy as np
import cv2
from rknn.api import RKNNONNX_MODEL = 'AlexNet.onnx'
RKNN_MODEL = 'AlexNet.rknn'
DATASET = './dataset.txt'if __name__ == '__main__':# 创建RKNN对象rknn = RKNN(verbose=True)# 配置RKNN模型:标准化以及指定部署平台print('--> config model')# 注意target_platform='rk3566'要替换成自己的平台rknn.config(mean_values=[127.5, 127.5, 127.5], std_values=[127.5, 127.5, 127.5], target_platform='rk3566')print('done')# 加载对应的深度学习框架print('--> Loading model')ret = rknn.load_onnx(model=ONNX_MODEL)if ret != 0:print('Load model failed!')exit(ret)print('done')# 构造RKNN模型print('--> Building model')# 注意do_quantization 用于控制模型参数和输入数据的量化,即是否将浮点数(float32)转换为整数(int8或int16).ret = rknn.build(do_quantization=True, dataset=DATASET)if ret != 0:print('Build model failed!')exit(ret)print('done')# 导出RKNN模型print('--> Export rknn model')ret = rknn.export_rknn(RKNN_MODEL)if ret != 0:print('Export rknn model failed!')exit(ret)print('done')# 释放RKNN对象rknn.release()
转化流程的指令如下:
# 将转化代码拷贝到ubuntu
docker cp E:\convert_rknn container_id:/root
# eg: docker cp E:\convert_rknn 38097dad59cc:/root# 进入ubuntu容器
docker exec -it container_id bash
# eg: docker exec -it 38097dad59cc bash# 执行代码
cd /root/convert_rknn
python convert.py# 查看目录内容
ls# 退出ubuntu容器,并将模型从ubuntu中拷贝出来
exit
docker cp container_id:/root/convert_rknn/xxx.rknn E:\
# eg: docker cp 38097dad59cc:/root/convert_rknn/AlexNet.rknn E:\


RKNPU2平台搭建依赖环境
【平台:aarch64 架构 Orange Pi 3B (RK3566) 的 Ubuntu 系统】
VNC可视化控制RK3566参考
常用的rknpu1、rknpu2用于端侧内容的开发和编译,对应python模型转换环境分别为:rknn-toolkit、rknn-toolkit2。
参考Rockchip NPU C++推理示例工程【githup下载】,构建AlexNet C++ 图像分类推理工程:
- rknpu2-master\examples\3rdparty\opencv\opencv-linux-aarch64拷贝到AlexNet;
- rknpu2-master\runtime\RK356X\Linux\librknn_api拷贝到AlexNet;
- 在AlexN目录下新建weights目录将rknn权重文件放到里面;
- 在AlexN目录下新建src目录放置推理代码用于执行c++推理(后面会提供);
- 构建CMakeLists.txt核心配置文件(后面会提供)。
AlexNet └── 3rdparty├── opencv| ├── opencv-linux-aarch64└── librknn_api├── aarch64| ├── vlibrknnrt.so├── include| ├── rknn_api.h| ├── rknn_matmul_api.h└── src├── AlexNet.cpp└── weights├── AlexNet.rknn└── CMakeLists.txt
RKNPU2调用rknn模型
RKNPU2推理核心流程
初始化RKNN模型
用于初始化一个 RKNN 上下文,并加载指定的模型。
ret = rknn_init(&ctx, model, model_len, 0, NULL);
| rknn_init参数 | ctx | model | model_size | flags | config |
|---|---|---|---|---|---|
| 作用 | 指向一个 rknn_context 类型的指针,用于存储初始化后的上下文。 | 指向模型数据的指针,通常是经过编译和优化的二进制文件。 | 以字节为单位模型数据的大小。 | 用于指定一些特殊初始化选项的标志位,通常设置为 0。 | 指向一个 rknn_sdk_config 结构体的指针,用于配置 SDK 的行为,不需要特殊配置通常设置为 NULL。 |
获取模型输入输出信息
用于查询 RKNN 上下文中的各种属性,包括输入和输出的详细信息(数量、名称和形状)、性能统计等信息。
ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num));
| rknn_query参数 | ctx | cmd | *param | param_size |
|---|---|---|---|---|
| 作用 | 调用 rknn_init 函数时已经初始化的 RKNN 上下文,标识当前的 RKNN 模型实例。 | 查询命令,用于指定要查询的信息类型。 | 指向一个缓冲区的指针,用于存储查询结果,缓冲区的类型和大小取决于查询命令。 | 以字节为单位的缓冲区大小。 |
| 内容 | – | RKNN_QUERY_IN_OUT_COUNT:查询模型的输入和输出张量的数量。RKNN_QUERY_INPUT_ATTR:查询输入张量的属性。RKNN_QUERY_OUTPUT_ATTR:查询输出张量的属性。RKNN_QUERY_PERF_DETAIL:查询性能详细信息,包括每个层的执行时间。RKNN_QUERY_PERF_STAT:查询性能统计信息,包括总的执行时间和平均执行时间。RKNN_QUERY_TARGET_PROCESSOR:查询目标处理器信息。RKNN_QUERY_MODEL_INFO:查询模型信息,包括模型的版本、输入输出张量的数量等。 | – | – |
预处理输入数据
对输入数据进行颜色空间转换,尺寸缩放操作。
cv::cvtColor(orig_img, orig_img_rgb, cv::COLOR_BGR2RGB);
cv::resize(orig_img, img, cv::Size(MODEL_IN_WIDTH, MODEL_IN_HEIGHT), 0, 0, cv::INTER_LINEAR);
这部分不是 RKNPU2 核心部分,根据任务需求不同,代码略微不同。
设置输入
设置 RKNN 模型的输入数据。
ret = rknn_inputs_set(ctx, io_num.n_input, inputs);
| cudaMalloc参数 | ctx | n_inputs | inputs |
|---|---|---|---|
| 作用 | 标识当前的 RKNN 模型实例。 | 输入张量的数量,与模型的输入张量数量必须一致。 | rknn_tensor_attr 结构体数组的指针,每个结构体描述一个输入张量的属性和数据。 |
执行推理
用于执行神经网络模型的推理,触发模型的前向传播过程,将输入数据传递给模型,并生成输出结果。
ret = rknn_run(ctx, nullptr);
| 函数 | ctx | mem |
|---|---|---|
| 作用 | 标识当前的 RKNN 模型实例。 | 指向 rknn_input_output_mem 结构体数组的指针,用于指定输入和输出数据的内存地址;设置为 nullptr,则表示使用默认的输入和输出内存。 |
获取输出
设置 RKNN 模型的输入数据。
ret = rknn_inputs_set(ctx, io_num.n_input, inputs);
| cudaMalloc参数 | ctx | n_inputs | inputs |
|---|---|---|---|
| 作用 | 标识当前的 RKNN 模型实例。 | 输入张量的数量,与模型的输入张量数量必须一致。 | rknn_tensor_attr 结构体数组的指针,每个结构体描述一个输入张量的属性和数据。 |
后处理推理结果
推理完成后,从输出张量中获取结果数据,根据需要对结果进行后处理,以获得最终的预测结果。
cv::Mat prob(output_attrs[i].dims[0], output_attrs[i].dims[1], CV_32F, (float*)buffer);cv::minMaxLoc(prob, &minv, &maxv, &minL, &maxL);
这部分不是 RKNPU2 核心部分,根据任务需求不同,代码基本不同。
RKNPU2推理代码
需要配置flower_classes.txt文件存储五种花的分类标签,并将其放置到工程目录的src路径下(推荐)。
daisy
dandelion
roses
sunflowers
tulips
这里需要将AlexNet.rknn放置到工程目录的weight路径下(推荐),并且将以下推理代码拷贝到src路径下的AlexNet.cpp文件中:
#include "opencv2/core/core.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/imgproc.hpp"
#include "rknn_api.h"#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/time.h>#include <fstream>
#include <iostream>using namespace std;
using namespace cv;std::string labels_txt_file = "src/flower_classes.txt";
std::vector<std::string> readClassNames()
{std::vector<std::string> classNames;std::ifstream fp(labels_txt_file);if (!fp.is_open()){printf("could not open file...\n");exit(-1);}std::string name;while (!fp.eof()){std::getline(fp, name);if (name.length())classNames.push_back(name);}fp.close();return classNames;
}// 从文件中读取二进制模型数据
// 参数:filename:模型文件名,model_size:模型大小 返回值:模型数据指针
static unsigned char *load_model(const char *filename, int *model_size)
{FILE *fp = fopen(filename, "rb");if (fp == nullptr){printf("fopen %s fail!\n", filename);return NULL;}fseek(fp, 0, SEEK_END);int model_len = ftell(fp);unsigned char *model = (unsigned char *)malloc(model_len); // 申请模型大小的内存,返回指针fseek(fp, 0, SEEK_SET);if (model_len != fread(model, 1, model_len, fp)){printf("fread %s fail!\n", filename);free(model);return NULL;}*model_size = model_len;if (fp){fclose(fp);}return model;
}int main(int argc, char **argv)
{rknn_context ctx = 0; // Rockchip NPU 的上下文句柄,用于标识和管理当前的模型实例.int ret; // 用于检查函数调用是否成功.int model_len = 0; // 用于存储模型文件的长度(以字节为单位).unsigned char *model; // 指向模型数据的指针.int MODEL_IN_WIDTH; // 输入模型图像的宽.int MODEL_IN_HEIGHT; // 输入模型图像的高.// const char *model_path = "weights/AlexNet.rknn";// const char *img_path = "images/40410963_3ac280f23a_n.jpg";const char *model_path = argv[1];const char *img_path = argv[2];if (argc != 3){printf("Usage: %s <rknn model> <image_path> \n", argv[0]);return -1;}std::vector<std::string> labels = readClassNames(); // 预测的目标标签数// ======================= 读取图片 ===================cv::Mat orig_img = imread(img_path, cv::IMREAD_COLOR);if (!orig_img.data){printf("cv::imread %s fail!\n", img_path);return -1;}// ======================= 初始化RKNN模型 ===================model = load_model(model_path, &model_len); // 获取模型指针ret = rknn_init(&ctx, model, model_len, 0, NULL); // 初始化RKNN模型if (ret < 0){printf("rknn_init fail! ret=%d\n", ret);return -1;}// ======================= 获取模型输入输出信息 ===================// ********** 输入输出数量 **********rknn_input_output_num io_num;ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num)); // 使用rknn_query函数获取模型输入输出数量if (ret != RKNN_SUCC){printf("rknn_query fail! ret=%d\n", ret);return -1;}printf("model input num: %d, output num: %d\n", io_num.n_input, io_num.n_output); // 打印模型输入输出数量// ********** 输入输出属性 **********rknn_tensor_attr input_attrs[io_num.n_input]; // 使用rknn_tensor_attr结构体存储模型输入属性memset(input_attrs, 0, sizeof(input_attrs)); // 将input_attrs用0初始化for (int i = 0; i < io_num.n_input; i++) // 网络可能有多个输入,遍历模型所有输入{input_attrs[i].index = i; // 设置模型输入索引ret = rknn_query(ctx, RKNN_QUERY_INPUT_ATTR, &(input_attrs[i]), sizeof(rknn_tensor_attr)); // 使用rknn_query函数获取模型输入信息,存储在input_attrsif (ret != RKNN_SUCC){printf("rknn_query fail! ret=%d\n", ret);return -1;}MODEL_IN_WIDTH = input_attrs[i].dims[1]; // 获取模型输入的具体宽MODEL_IN_HEIGHT = input_attrs[i].dims[2]; // 获取模型输入的具体高// 打印模型输入信息printf("input tensors: index=%d, name=%s, n_dims=%d, dims=[%d, %d, %d, %d], n_elems=%d, size=%d, fmt=%s, type=%s, qnt_type=%s, ""zp=%d, scale=%f\n",input_attrs[i].index, input_attrs[i].name, input_attrs[i].n_dims, input_attrs[i].dims[0], input_attrs[i].dims[1], input_attrs[i].dims[2], input_attrs[i].dims[3],input_attrs[i].n_elems, input_attrs[i].size, get_format_string(input_attrs[i].fmt), get_type_string(input_attrs[i].type),get_qnt_type_string(input_attrs[i].qnt_type), input_attrs[i].zp, input_attrs[i].scale);}rknn_tensor_attr output_attrs[io_num.n_output]; // 使用rknn_tensor_attr结构体存储模型输出信息memset(output_attrs, 0, sizeof(output_attrs)); // 将output_attrs用0初始化for (int i = 0; i < io_num.n_output; i++) // 网络可能有多个输出,遍历模型所有输出{output_attrs[i].index = i; // 设置模型输入索引ret = rknn_query(ctx, RKNN_QUERY_OUTPUT_ATTR, &(output_attrs[i]), sizeof(rknn_tensor_attr));if (ret != RKNN_SUCC){printf("rknn_query fail! ret=%d\n", ret);return -1;}// 打印模型输出信息printf("output tensors: index=%d, name=%s, n_dims=%d, dims=[%d, %d, %d, %d], n_elems=%d, size=%d, fmt=%s, type=%s, qnt_type=%s, ""zp=%d, scale=%f\n",output_attrs[i].index, output_attrs[i].name, output_attrs[i].n_dims, output_attrs[i].dims[0], output_attrs[i].dims[1], output_attrs[i].dims[2], output_attrs[i].dims[3],output_attrs[i].n_elems, output_attrs[i].size, get_format_string(output_attrs[i].fmt), get_type_string(output_attrs[i].type),get_qnt_type_string(output_attrs[i].qnt_type), output_attrs[i].zp, output_attrs[i].scale);}// ======================= 前处理 ===================cv::Mat orig_img_rgb;cv::cvtColor(orig_img, orig_img_rgb, cv::COLOR_BGR2RGB); // 默认是BGR需要转化成RGBcv::Mat img = orig_img_rgb.clone();if (orig_img.cols != MODEL_IN_WIDTH || orig_img.rows != MODEL_IN_HEIGHT){cv::resize(orig_img, img, cv::Size(MODEL_IN_WIDTH, MODEL_IN_HEIGHT), 0, 0, cv::INTER_LINEAR); // 对图像尺寸进行缩放}// ======================= 设置模型输入 ===================rknn_input inputs[io_num.n_input]; // 使用rknn_input结构体存储模型输入信息memset(inputs, 0, sizeof(inputs)); // 将inputs用0初始化for (int i = 0; i < io_num.n_input; i++){ inputs[i].index = input_attrs[i].index; // 设置模型输入索引 inputs[i].type = RKNN_TENSOR_UINT8; // 设置模型输入类型 inputs[i].size = input_attrs[i].dims[1] * input_attrs[i].dims[2] * input_attrs[i].dims[3] * sizeof(uint8_t); // 设置模型输入大小inputs[i].fmt = input_attrs[i].fmt; // 设置模型输入格式:NHWC inputs[i].buf = img.data; // 设置模型输入数据 }ret = rknn_inputs_set(ctx, io_num.n_input, inputs); // 使用rknn_inputs_set函数设置模型输入if (ret < 0){printf("rknn_input_set fail! ret=%d\n", ret);return -1;}// ======================= 推理 ===================ret = rknn_run(ctx, nullptr); // 使用rknn_run函数运行RKNN模型if (ret < 0){printf("rknn_run fail! ret=%d\n", ret);return -1;}// ======================= 获取模型输出 ===================rknn_output outputs[io_num.n_output]; // 使用rknn_output结构体存储模型输出信息memset(outputs, 0, sizeof(outputs)); // 将outputs用0初始化for (int i = 0; i < io_num.n_output; i++){ outputs[i].want_float = 1; // 设置模型输出类型为float}ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL); // 使用rknn_outputs_get函数获取模型输出if (ret < 0){printf("rknn_outputs_get fail! ret=%d\n", ret);return -1;}// ======================= 后处理 ===================for (int i = 0; i < io_num.n_output; i++) // 遍历模型所有输出{float *buffer = (float *)outputs[i].buf; // 模型输出数据// 1x5 获取输出数据并包装成一个cv::Mat对象,为了方便后处理cv::Mat prob(output_attrs[i].dims[0], output_attrs[i].dims[1], CV_32F, (float*)buffer);std::cout << "prob: " << prob << std::endl;// 后处理推理结果cv::Point maxL, minL; // 用于存储图像分类中的得分最小值索引和最大值索引(坐标)double maxv, minv; // 用于存储图像分类中的得分最小值和最大值cv::minMaxLoc(prob, &minv, &maxv, &minL, &maxL); int max_index = maxL.x; // 获得最大值的索引,只有一行所以列坐标既为索引std::cout << "label id: " << max_index << std::endl;cv::putText(orig_img, labels[max_index], cv::Point(50, 50), cv::FONT_HERSHEY_SIMPLEX, 1.0, cv::Scalar(0, 0, 255), 2, 8);cv::imwrite("./output.jpg", orig_img);}// ======================= 释放输出缓冲区 ===================rknn_outputs_release(ctx, 1, outputs); // 释放rknn_outputs_get获取的输出if (ret < 0){printf("rknn_outputs_release fail! ret=%d\n", ret);return -1;}else if (ctx > 0){// ======================= 释放RKNN模型 ===================rknn_destroy(ctx);}// ======================= 释放模型数据 ===================if (model){free(model);}return 0;
}
CMakeLists.txt核心配置文件:
# 设置最低版本号
cmake_minimum_required(VERSION 3.11 FATAL_ERROR)
# 设置项目名称,博主的平台是3566
project(rk3566-demo VERSION 0.0.1 LANGUAGES CXX)# 输出系统信息
message(STATUS "System: ${CMAKE_SYSTEM_NAME} ${CMAKE_SYSTEM_VERSION}")# 设置编译器
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)# rknn_api 文件夹路径
set(RKNN_API_PATH ${CMAKE_CURRENT_SOURCE_DIR}/librknn_api)
# rknn_api include 路径
set(RKNN_API_INCLUDE_PATH ${RKNN_API_PATH}/include)
# rknn_api lib 路径
set(RKNN_API_LIB_PATH ${RKNN_API_PATH}/aarch64/librknnrt.so)# 寻找OpenCV库,使用自定义的OpenCV_DIR
set(3RDPARTY_PATH ${CMAKE_CURRENT_SOURCE_DIR}/3rdparty)
set(OpenCV_DIR ${3RDPARTY_PATH}/opencv/opencv-linux-${LIB_ARCH}/share/OpenCV)
find_package(OpenCV 3.4.5 REQUIRED) # 输出OpenCV信息
message(STATUS "include path: ${OpenCV_INCLUDE_DIRS}")# 用来搜索头文件的目录
include_directories(${OpenCV_INCLUDE_DIRS}${RKNN_API_INCLUDE_PATH}
)# 测试NPU:rknn alexnet
add_executable(alexnet src/AlexNet.cpp)# 链接库
target_link_libraries(alexnet${RKNN_API_LIB_PATH}${OpenCV_LIBS}
)
编译和链接,完成推理,查看结果:
# 用于配置 CMake 项目的命令
# -S .: 指定了源代码目录,.当前目录
# -B build: 指定了构建目录,当前目录下创建build子目录
cmake -S . -B build# 使用先前配置好的构建系统来编译和链接项目
cmake --build build# 执行推理
./build/alexnet ./weights/AlexNet.rknn ./images/sunflowers.jpg
向日葵图片预测不准确:

不知道为什么,可能是在模型转化过程中造成了精度损失,在五种花分类这种类别相近的任务中,分类准确度超级低。
总结
尽可能简单、详细的介绍了pytorch模型到rknn模型的转化,C++下 RKNN Toolkit 和 RKNPU2 环境的搭建以及 rknn 模型的 RKNPU2 部署。
相关文章:
【深度学习】【RKNN】【C++】模型转化、环境搭建以及模型部署的详细教程
【深度学习】【RKNN】【C】模型转化、环境搭建以及模型部署的详细教程 提示:博主取舍了很多大佬的博文并亲测有效,分享笔记邀大家共同学习讨论 文章目录 【深度学习】【RKNN】【C】模型转化、环境搭建以及模型部署的详细教程前言模型转换--pytorch转rknnpytorch转onnxonnx转rkn…...

CentOS环境上离线安装python3及相关包
0. 准备操作系统及安装包 准备操作系统环境: 首先安装依赖包,安装相应的编译工具 [rootbigdatahost bin]# yum -y install zlib-devel bzip2-devel openssl-devel ncurses-devel sqlite-devel readline-devel tk-devel gdbm-devel db4-devel libpcap-d…...

学习threejs,使用设置bumpMap凹凸贴图创建褶皱,实现贴图厚度效果
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:threejs gis工程师 文章目录 一、🍀前言1.1 ☘️THREE.MeshPhongMaterial高…...

React表单联动
Ant Design 1、dependencies Form.Item 可以通过 dependencies 属性,设置关联字段。当关联字段的值发生变化时,会触发校验与更新。 一种常见的场景:注册用户表单的“密码”与“确认密码”字段。“确认密码”校验依赖于“密码”字段&#x…...

408数据结构:栈、队列和数组选择题做题笔记
408数据结构 第一章 绪论 第二章 线性表 绪论、线性表选择题做题笔记 第三章 栈、队列和数组 栈、队列和数组选择题做题笔记 文章目录 408数据结构前言 一、队列二、栈和队列的应用总结 前言 本篇文章为针对王道25数据结构课后习题的栈、队列和数组的做题笔记,后续…...
sql工具!好用!爱用!
SQLynx的界面设计简洁明了,操作逻辑清晰易懂,没有复杂的图标和按钮,想对哪部分操作就在哪里点击右键,即使你是数据库小白也能轻松上手。 尽管SQLynx是一款免费的工具,但是它的功能却丝毫不逊色于其他付费产品ÿ…...

嵌入式驱动开发详解3(pinctrl和gpio子系统)
文章目录 前言pinctrl子系统pin引脚配置pinctrl驱动详解 gpio子系统gpio属性配置gpio子系统驱动gpio子系统API函数与gpio子系统相关的of函数 pinctrl和gpio子系统的使用设备树配置驱动层部分用户层部分 前言 如果不用pinctrl和gpio子系统的话,我们开发驱动时需要先…...
:IO类)
【C++】IO库(一):IO类
IO 库 C 不直接处理输入输出,而是通过定义一族定义在标准库当中的类型来处理IO。 8.1 IO 类 为了支持不同种类的 IO 处理操作,除了 istream 和 ostream 之外,标准库还定义了其它 IO 类型。这些类型分别定义在三个独立的头文件当中…...

uniapp介入极光推送教程 超级详细
直接按照下面教程操作 一步一步来 很快就能 完成 下面的文章非常详细 ,我就不班门弄斧了 直接上原文链接 https://blog.csdn.net/weixin_52830464/article/details/143823231...

阿里云整理(一)
阿里云整理 1. 介绍规模 2. 专业名词2.1 专有网络VPC2.2 安全组SG2.3 云服务器ECS2.4 资源组2.5 部署集2.5 web测试 1. 介绍 阿里云是一家提供云计算和人工智能服务的科技公司,成立于2009年,总部位于杭州。它为全球客户提供全方位的云服务ÿ…...
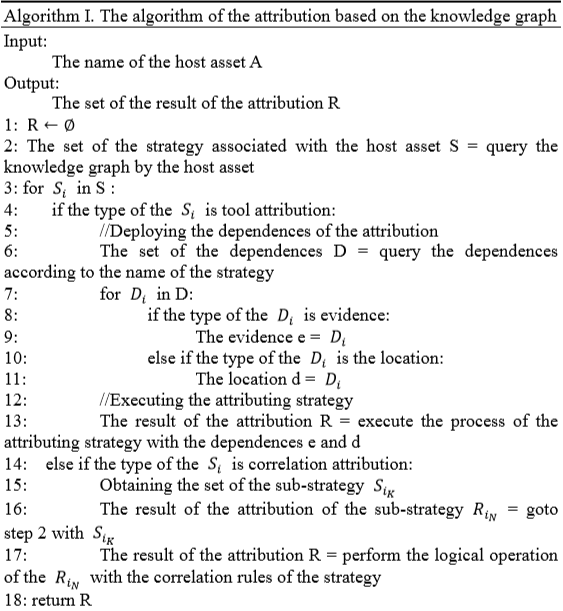
论文笔记 网络安全图谱以及溯源算法
本文提出了一种网络攻击溯源框架,以及一种网络安全知识图谱,该图由六个部分组成,G <H,V,A,E,L,S,R>。 1|11.知识图 网络知识图由六个部分组成,…...
)
室内定位论文速递(11.23-11.25)
多传感器姿态估计的Delta滤波器和卡尔曼滤波器设计在球形移动测绘系统中的应用 关键词 球形机器人;姿态估计;传感器融合;卡尔曼滤波器;Delta滤波器;移动测绘;LiDAR 研究问题 球形移动测绘系统中的惯性姿态估计过滤技术尚未得到充分研究。由于其内在的滚动运动,该系统…...

英伟达推出了全新的小型语言模型家族——Hymba 1.5B
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

云网络基础- TCP/IP 协议
文章目录 典型服务模式TCP/IP 协议设置和查看IPIP地址的分类:IP地址组成: 网络位主机位组成克隆:产生一台新的虚拟机win2008 典型服务模式 • C/S,Client/Server架构 – 由服务器提供资源或某种功能 – 客户机使用资源或功能 TCP/IP 协议 • TCP/IP是最广泛支持的通信协议集合…...

android 音效可视化--Visualizer
Visualizer 是使应用程序能够检索当前播放音频的一部分以进行可视化。它不是录音接口,仅返回部分低质量的音频内容。但是,为了保护某些音频数据的隐私,使用 Visualizer 需要 android.permission.RECORD_AUDIO权限。传递给构造函数的音频会话 …...

Python人工智能项目报告
一、实践概述 1、实践计划和目的 在现代社会,计算机技术已成为支撑社会发展的核心力量,渗透到生活的各个领域,应关注人类福祉,确保自己的工作成果能够造福社会,同时维护安全、健康的自然环境,设计出具有包…...

DockerFile 构建基础镜像
1.准备东西 DockerFile 文件 以及安装docker环境 文件内容如下: # 使用Alpine Linux作为基础镜像 FROM --platformlinux/amd64 nginx:1.27.2-alpine # 维护者信息 LABEL maintainer"xu_yhao163.com" ENV LANG en_US.UTF-8 ENV LANGUAGE en_US:en ENV …...

卷积神经网络学习记录
目录 神经网络基础定义: 基本组成部分 工作流程 卷积层(卷积定义)【CONV】: 卷积层(Convolutional Layer) 特征提取:卷积层的主要作用是通过卷积核(或滤波器)运算提…...

5种常见的k8s云原生数据管理方案详解
Kubernetes(K8s)是云原生架构的核心组件,提供高效的容器编排和管理功能。在数据存储方面,K8s通过PersistentVolumes(PV)和PersistentVolumeClaims(PVC)机制实现数据持久化࿰…...

[C++]了解内置类型升级
内置类型升级 1.调用模板T时,为什么可以使用T()类型的匿名对象来传参2.内置类型被升级成为类后的使用事项 1.调用模板T时,为什么可以使用T()类型的匿名对象来传参 当我们在定义或声明一个函数时,如果想使用模板T类型的默认构造(例…...
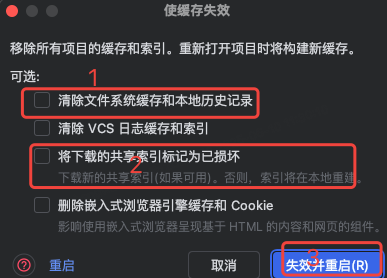
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...
。】2022-5-15)
【根据当天日期输出明天的日期(需对闰年做判定)。】2022-5-15
缘由根据当天日期输出明天的日期(需对闰年做判定)。日期类型结构体如下: struct data{ int year; int month; int day;};-编程语言-CSDN问答 struct mdata{ int year; int month; int day; }mdata; int 天数(int year, int month) {switch (month){case 1: case 3:…...

利用ngx_stream_return_module构建简易 TCP/UDP 响应网关
一、模块概述 ngx_stream_return_module 提供了一个极简的指令: return <value>;在收到客户端连接后,立即将 <value> 写回并关闭连接。<value> 支持内嵌文本和内置变量(如 $time_iso8601、$remote_addr 等)&a…...
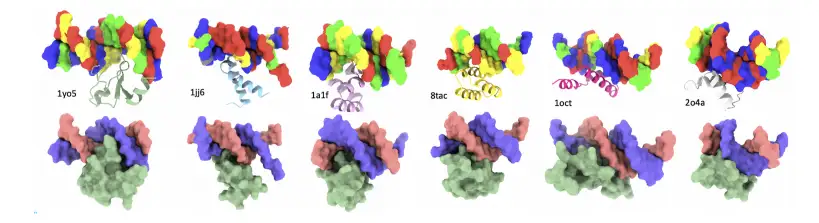
8k长序列建模,蛋白质语言模型Prot42仅利用目标蛋白序列即可生成高亲和力结合剂
蛋白质结合剂(如抗体、抑制肽)在疾病诊断、成像分析及靶向药物递送等关键场景中发挥着不可替代的作用。传统上,高特异性蛋白质结合剂的开发高度依赖噬菌体展示、定向进化等实验技术,但这类方法普遍面临资源消耗巨大、研发周期冗长…...

ssc377d修改flash分区大小
1、flash的分区默认分配16M、 / # df -h Filesystem Size Used Available Use% Mounted on /dev/root 1.9M 1.9M 0 100% / /dev/mtdblock4 3.0M...
【Redis技术进阶之路】「原理分析系列开篇」分析客户端和服务端网络诵信交互实现(服务端执行命令请求的过程 - 初始化服务器)
服务端执行命令请求的过程 【专栏简介】【技术大纲】【专栏目标】【目标人群】1. Redis爱好者与社区成员2. 后端开发和系统架构师3. 计算机专业的本科生及研究生 初始化服务器1. 初始化服务器状态结构初始化RedisServer变量 2. 加载相关系统配置和用户配置参数定制化配置参数案…...

基于数字孪生的水厂可视化平台建设:架构与实践
分享大纲: 1、数字孪生水厂可视化平台建设背景 2、数字孪生水厂可视化平台建设架构 3、数字孪生水厂可视化平台建设成效 近几年,数字孪生水厂的建设开展的如火如荼。作为提升水厂管理效率、优化资源的调度手段,基于数字孪生的水厂可视化平台的…...
【开发技术】.Net使用FFmpeg视频特定帧上绘制内容
目录 一、目的 二、解决方案 2.1 什么是FFmpeg 2.2 FFmpeg主要功能 2.3 使用Xabe.FFmpeg调用FFmpeg功能 2.4 使用 FFmpeg 的 drawbox 滤镜来绘制 ROI 三、总结 一、目的 当前市场上有很多目标检测智能识别的相关算法,当前调用一个医疗行业的AI识别算法后返回…...
算法岗面试经验分享-大模型篇
文章目录 A 基础语言模型A.1 TransformerA.2 Bert B 大语言模型结构B.1 GPTB.2 LLamaB.3 ChatGLMB.4 Qwen C 大语言模型微调C.1 Fine-tuningC.2 Adapter-tuningC.3 Prefix-tuningC.4 P-tuningC.5 LoRA A 基础语言模型 A.1 Transformer (1)资源 论文&a…...
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...