cartographer建图与定位应用
文章目录
- 前言
- 一、安装cartographer
- 1.安装环境
- 2.源码编译
- 2.1 下载
- 2.2 编译
- 二、gazebo仿真2d建图
- 0.准备仿真环境
- 1.编写lua文件
- 2.编写启动文件
- 3.建图保存
- 三、cartographer定位 + move_base导航
- 3.1 编写启动文件
- 3.2 启动launch
- 总结
前言
本文介绍cartographer在ubuntu18.04下的使用过程,作为笔记仅供参考。
一、安装cartographer
使用李想大佬的脚本进行安装,同时参考下面的文章
Cartographer 环境极速配置 + 2D 3D建图测试
在此感谢两位大佬的教程。
1.安装环境
文件下载参考上文链接。
下载完成后,将cartographer_install_2021-04-20压缩文件解压,执行安装脚本即可。
./auto-carto-build.sh
2.源码编译
2.1 下载
mkdir ~/carto_ws
cd carto_ws/
git clone https://github.com/xiangli0608/cartographer_detailed_comments_ws.git
cd cartographer_detailed_comments_ws/
git pull origin master
2.2 编译
cd cartographer_detailed_comments_ws/
./catkin_make.sh
至此,cartographer源码编译完成。
二、gazebo仿真2d建图
0.准备仿真环境
以mbot仿真机器人为例,不发布odom->dummy的TF变换,注意底盘的坐标系dummy和imu的坐标系imu_link,激光话题: /scan,里程计话题: /odom ,imu话题: /imu

1.编写lua文件
以2d_online.lua为例,在~/carto_ws/cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/configuration_files/目录下创建2d_online.lua文件,内容如下:
-- Copyright 2016 The Cartographer Authors
--
-- Licensed under the Apache License, Version 2.0 (the "License");
-- you may not use this file except in compliance with the License.
-- You may obtain a copy of the License at
--
-- http://www.apache.org/licenses/LICENSE-2.0
--
-- Unless required by applicable law or agreed to in writing, software
-- distributed under the License is distributed on an "AS IS" BASIS,
-- WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-- See the License for the specific language governing permissions and
-- limitations under the License.include "map_builder.lua"
include "trajectory_builder.lua"options = {map_builder = MAP_BUILDER,trajectory_builder = TRAJECTORY_BUILDER,map_frame = "map",tracking_frame = "imu_link",published_frame = "dummy",odom_frame = "odom",provide_odom_frame = true,publish_frame_projected_to_2d = false,use_odometry = true,use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 1,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,
}MAP_BUILDER.use_trajectory_builder_2d = trueTRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.2
TRAJECTORY_BUILDER_2D.max_range = 20.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = true
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65return options--报错:map_by_time.h:43]Check failed: data.time > std::prev(trajectory.end())->first
--修改map_by_time.h:43行 :CHECK_GT(data.time, std::prev(trajectory.end())->first)中的CHECK_GT改为CHECK_GE--使用gazebo发布的odom数据,并发布TF变换,此时map->odom->dummy
--对使用imu数据 use_imu_data=true,要将tracking_frame设置为imu的坐标系;2.编写启动文件
仿照lx_rs16_2d_outdoor.launch文件编写test_2d_laser.launch文件
<launch><param name="/use_sim_time" value="true" /><!-- 启动cartographer --><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename 2d_online.lua"output="screen"><!-- <remap from="points2" to="rslidar_points" /> --><remap from="scan" to="/scan" /><remap from="odom" to="/odom" /><remap from="imu" to="/imu" /></node><!-- 生成ros格式的地图 --><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" /><!-- 启动rviz --><node name="rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/lx_2d.rviz" />
</launch>
3.建图保存
roslaunch mbot_gazebo mbot_laser_nav_gazebo_t.launch
roslaunch cartographer_ros test_2d_laser.launch
开始建图
 键盘控制机器人进行建图,效果如下
键盘控制机器人进行建图,效果如下

保存地图(脚本中地图名字记得修改)
./finish_slam_2d.sh
三、cartographer定位 + move_base导航
使用cartographer定位代替amcl定位。
3.1 编写启动文件
编写lua文件
include "2d_online.lua"TRAJECTORY_BUILDER.pure_localization_trimmer = {max_submaps_to_keep = 3,
}
MAP_BUILDER.num_background_threads = 8
POSE_GRAPH.optimize_every_n_nodes = 80return options
编写launch文件
<!--Copyright 2016 The Cartographer AuthorsLicensed under the Apache License, Version 2.0 (the "License");you may not use this file except in compliance with the License.You may obtain a copy of the License athttp://www.apache.org/licenses/LICENSE-2.0Unless required by applicable law or agreed to in writing, softwaredistributed under the License is distributed on an "AS IS" BASIS,WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.See the License for the specific language governing permissions andlimitations under the License.
--><launch><!-- pbstream的地址与名称 --><arg name="load_state_filename" default="$(env HOME)/carto_ws/map/test-1.pbstream"/><param name="/use_sim_time" value="true" /><!-- 重定位用,接收/initialpose话题--><param name="/localization" type="bool" value = "1"/><param name="/set_inital_pose_x" type="double" value = "0"/><param name="/set_inital_pose_y" type="double" value = "0"/><param name="/set_inital_pose_z" type="double" value = "0.0"/><param name="/set_inital_pose_ox" type="double" value = "0.0"/><param name="/set_inital_pose_oy" type="double" value = "0.0"/><param name="/set_inital_pose_oz" type="double" value = "0"/><param name="/set_inital_pose_ow" type="double" value = "1"/><!-- 启动cartographer --><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename 2d_localization.lua-load_state_filename $(arg load_state_filename)"output="screen"><!-- <remap from="points2" to="rslidar_points" /> --><remap from="scan" to="scan" /><remap from="odom" to="odom" /><remap from="imu" to="imu" /></node><!-- 启动map_server --><node name="map_server" pkg="map_server" type="map_server"args="$(env HOME)/carto_ws/map/test-1.yaml" /> <!-- LX大佬修改过的--><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05-pure_localization 1" /> <!-- 启动rviz --><node name="rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" /></launch>3.2 启动launch
#仿真环境
roslaunch mbot_gazebo mbot_laser_nav_gazebo_t.launch
#定位及加载地图
roslaunch cartographer_ros test_2d_laser_localization.launch
#导航
roslaunch mbot_navigation nav_cloister_demo_teb.launch
从TF可看到,cartographer定位已代替amcl定位。
 导航效果图
导航效果图

总结
本文简单介绍了cartographer的使用包括建图和定位,没有进行具体的理论介绍与推导,也没有针对具体参数进行介绍,仅仅记录使用过程。
相关文章:
cartographer建图与定位应用
文章目录 前言一、安装cartographer1.安装环境2.源码编译2.1 下载2.2 编译 二、gazebo仿真2d建图0.准备仿真环境1.编写lua文件2.编写启动文件3.建图保存 三、cartographer定位 move_base导航3.1 编写启动文件3.2 启动launch 总结 前言 本文介绍cartographer在ubuntu18.04下的…...

专业解析 .bashrc 中 ROS 工作空间的加载顺序及其影响 ubuntu 机器人
专业解析 .bashrc 中 ROS 工作空间的加载顺序及其影响 在使用 ROS(Robot Operating System)进行开发时,通常会涉及多个 Catkin 工作空间(Catkin Workspace)。这些工作空间包含不同的 ROS 包和节点,可能相互…...

Apache Doris 现行版本 Docker-Compose 运行教程
特别注意!Doris On Docker 部署方式仅限于开发环境或者功能测试环境,不建议生产环境部署! 如有生产环境或性能测试集群部署诉求,请使用裸机/虚机部署或K8S Operator部署方案! 原文阅读:Apache Doris 现行版…...

Flink四大基石之窗口(Window)使用详解
目录 一、引言 二、为什么需要 Window 三、Window 的控制属性 窗口的长度(大小) 窗口的间隔 四、Flink 窗口应用代码结构 是否分组 Keyed Window --键控窗 Non-Keyed Window 核心操作流程 五、Window 的生命周期 分配阶段 触发计算 六、Wi…...

NGINX配置https双向认证(自签一级证书)
一 生成自签证书 以下是生成自签证书(包括服务端和客户端的证书)的步骤,以下命令执行两次,分别生成客户端和服务端证书和私钥。具体执行可以先建两个目录client和server,分别进入到这两个目录下执行下面的命令。 生成私钥: 首先&…...

Flink双流Join
在离线 Hive 中,我们经常会使用 Join 进行多表关联。那么在实时中我们应该如何实现两条流的 Join 呢?Flink DataStream API 为我们提供了3个算子来实现双流 join,分别是: join coGroup intervalJoin 下面我们分别详细看一下这…...

【数据结构实战篇】用C语言实现你的私有队列
🏝️专栏:【数据结构实战篇】 🌅主页:f狐o狸x 在前面的文章中我们用C语言实现了栈的数据结构,本期内容我们将实现队列的数据结构 一、队列的概念 队列:只允许在一端进行插入数据操作,在另一端…...

基于web的海贼王动漫介绍 html+css静态网页设计6页+设计文档
📂文章目录 一、📔网站题目 二、✍️网站描述 三、📚网站介绍 四、🌐网站演示 五、⚙️网站代码 🧱HTML结构代码 💒CSS样式代码 六、🔧完整源码下载 七、📣更多 一、&#…...

2022 年 9 月青少年软编等考 C 语言三级真题解析
目录 T1. 课程冲突T2. 42 点思路分析T3. 最长下坡思路分析T4. 吃糖果思路分析T5. 放苹果思路分析T1. 课程冲突 此题为 2021 年 9 月三级第一题原题,见 2021 年 9 月青少年软编等考 C 语言三级真题解析中的 T1。 T2. 42 点 42 42 42 是: 组合数学上的第 5 5 5 个卡特兰数字…...

机器学习算法(六)---逻辑回归
常见的十大机器学习算法: 机器学习算法(一)—决策树 机器学习算法(二)—支持向量机SVM 机器学习算法(三)—K近邻 机器学习算法(四)—集成算法 机器学习算法(五…...

计算机科学中的主要协议
1、主要应用层协议: HTTP、FTP、SMTP、POP、IMAP、DNS、TELNET和SSH等 应用层协议的主要功能是支持网络应用,定义了不同应用程序之间的通信规则。它们负责将用户操作转换为网络可以理解的数据格式,并通过传输层进行传输。应用层协议直接与用…...

下载maven 3.6.3并校验文件做md5或SHA512校验
一、下载Apache Maven 3.6.3 Apache Maven 3.6.3 官方下载链接: 二进制压缩包(推荐): ZIP格式: https://archive.apache.org/dist/maven/maven-3/3.6.3/binaries/apache-maven-3.6.3-bin.zipTAR.GZ格式: https://archive.apache.org/dist/…...

【Android】View工作原理
View 是Android在视觉上的呈现在界面上Android提供了一套GUI库,里面有很多控件,但是很多时候我们并不满足于系统提供的控件,因为这样就意味这应用界面的同类化比较严重。那么怎么才能做出与众不同的效果呢?答案是自定义View&#…...

TIE算法具体求解-为什么是泊松方程和傅里叶变换
二维泊松方程的通俗理解 二维泊松方程 是偏微分方程的一种形式,通常用于描述空间中某个标量场(如位相场、电势场)的分布规律。其一般形式为: ∇ 2 ϕ ( x , y ) f ( x , y ) \nabla^2 \phi(x, y) f(x, y) ∇2ϕ(x,y)f(x,y) 其…...
截取指定位数的字符等)
postman中获取随机数、唯一ID、时间日期(包括当前日期增减)截取指定位数的字符等
在Postman中,您可以使用内置的动态变量和编写脚本的方式来获取随机数、唯一ID、时间日期以及截取指定位数的字符。以下是具体的操作方法: 一、postman中获取随机数、唯一ID、时间日期(包括当前日期增减)截取指定位数的字符等 获取…...

【计算机网络】实验3:集线器和交换器的区别及交换器的自学习算法
实验 3:集线器和交换器的区别及交换器的自学习算法 一、 实验目的 加深对集线器和交换器的区别的理解。 了解交换器的自学习算法。 二、 实验环境 • Cisco Packet Tracer 模拟器 三、 实验内容 1、熟悉集线器和交换器的区别 (1) 第一步:构建网络…...

flink学习(14)—— 双流join
概述 Join:内连接 CoGroup:内连接,左连接,右连接 Interval Join:点对面 Join 1、Join 将有相同 Key 并且位于同一窗口中的两条流的元素进行关联。 2、Join 可以支持处理时间(processing time)和事件时…...

HTTP协议详解:从HTTP/1.0到HTTP/3的演变与优化
深入浅出:从头到尾全面解析HTTP协议 一、HTTP协议概述 1.1 HTTP协议简介 HTTP(HyperText Transfer Protocol,超文本传输协议)是互联网上应用最广泛的通信协议之一。它用于客户端与服务器之间的数据传输,尤其是在Web…...
张量并行和流水线并行在Transformer中的具体部位
目录 张量并行和流水线并行在Transformer中的具体部位 一、张量并行 二、流水线并行 张量并行和流水线并行在Transformer中的具体部位 张量并行和流水线并行是Transformer模型中用于提高训练效率的两种并行策略。它们分别作用于模型的不同部位,以下是对这两种并行的具体说…...

WEB开发: 丢掉包袱,拥抱ASP.NET CORE!
今天的 Web 开发可以说进入了一个全新的时代,前后端分离、云原生、微服务等等一系列现代技术架构应运而生。在这个背景下,作为开发者,你一定希望找到一个高效、灵活、易于扩展且具有良好性能的框架。那么,ASP.NET Core 显然是一个…...
【力扣数据库知识手册笔记】索引
索引 索引的优缺点 优点1. 通过创建唯一性索引,可以保证数据库表中每一行数据的唯一性。2. 可以加快数据的检索速度(创建索引的主要原因)。3. 可以加速表和表之间的连接,实现数据的参考完整性。4. 可以在查询过程中,…...
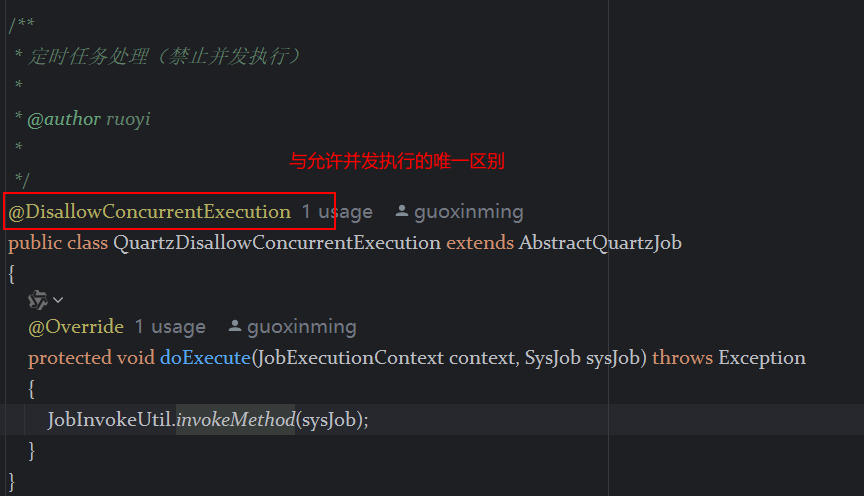
定时器任务——若依源码分析
分析util包下面的工具类schedule utils: ScheduleUtils 是若依中用于与 Quartz 框架交互的工具类,封装了定时任务的 创建、更新、暂停、删除等核心逻辑。 createScheduleJob createScheduleJob 用于将任务注册到 Quartz,先构建任务的 JobD…...

spring:实例工厂方法获取bean
spring处理使用静态工厂方法获取bean实例,也可以通过实例工厂方法获取bean实例。 实例工厂方法步骤如下: 定义实例工厂类(Java代码),定义实例工厂(xml),定义调用实例工厂ÿ…...
)
相机Camera日志分析之三十一:高通Camx HAL十种流程基础分析关键字汇总(后续持续更新中)
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了:有对最普通的场景进行各个日志注释讲解,但相机场景太多,日志差异也巨大。后面将展示各种场景下的日志。 通过notepad++打开场景下的日志,通过下列分类关键字搜索,即可清晰的分析不同场景的相机运行流程差异…...
)
WEB3全栈开发——面试专业技能点P2智能合约开发(Solidity)
一、Solidity合约开发 下面是 Solidity 合约开发 的概念、代码示例及讲解,适合用作学习或写简历项目背景说明。 🧠 一、概念简介:Solidity 合约开发 Solidity 是一种专门为 以太坊(Ethereum)平台编写智能合约的高级编…...

Hive 存储格式深度解析:从 TextFile 到 ORC,如何选对数据存储方案?
在大数据处理领域,Hive 作为 Hadoop 生态中重要的数据仓库工具,其存储格式的选择直接影响数据存储成本、查询效率和计算资源消耗。面对 TextFile、SequenceFile、Parquet、RCFile、ORC 等多种存储格式,很多开发者常常陷入选择困境。本文将从底…...

return this;返回的是谁
一个审批系统的示例来演示责任链模式的实现。假设公司需要处理不同金额的采购申请,不同级别的经理有不同的审批权限: // 抽象处理者:审批者 abstract class Approver {protected Approver successor; // 下一个处理者// 设置下一个处理者pub…...

AGain DB和倍数增益的关系
我在设置一款索尼CMOS芯片时,Again增益0db变化为6DB,画面的变化只有2倍DN的增益,比如10变为20。 这与dB和线性增益的关系以及传感器处理流程有关。以下是具体原因分析: 1. dB与线性增益的换算关系 6dB对应的理论线性增益应为&…...
STM32---外部32.768K晶振(LSE)无法起振问题
晶振是否起振主要就检查两个1、晶振与MCU是否兼容;2、晶振的负载电容是否匹配 目录 一、判断晶振与MCU是否兼容 二、判断负载电容是否匹配 1. 晶振负载电容(CL)与匹配电容(CL1、CL2)的关系 2. 如何选择 CL1 和 CL…...

OD 算法题 B卷【正整数到Excel编号之间的转换】
文章目录 正整数到Excel编号之间的转换 正整数到Excel编号之间的转换 excel的列编号是这样的:a b c … z aa ab ac… az ba bb bc…yz za zb zc …zz aaa aab aac…; 分别代表以下的编号1 2 3 … 26 27 28 29… 52 53 54 55… 676 677 678 679 … 702 703 704 705;…...