51c视觉~CV~合集10
我自己的原文哦~ https://blog.51cto.com/whaosoft/13241694
一、CV创建自定义图像滤镜
热图滤镜
这组滤镜提供了各种不同的艺术和风格化光学图像捕捉方法。例如,热滤镜会将图像转换为“热图”,而卡通滤镜则提供生动的图像,这些图像看起来就像是漫画书制作的。最接近自然色彩以及海滩和自然场景的是 VSCO 滤镜。如果要减少工业感,可以对 Instagram 应用滤镜进行大量投资。将这个简单的灰度图转换为彩色图像。这将是灰度滤镜之一。最后,让我们考虑油画滤镜,OpenCV 通过一种风格化技术实现了该滤镜,该技术可创建看起来像油画的纹理效果。用户只需几行代码即可通过 OpenCV 和 Python 轻松使用它们来增强图像。

热成像非常适合在夜间或存在轻微雾、雨或烟等遮挡物的情况下生成图像。例如,前视红外或 FLIR 摄像机可用于为军用和民用飞机提供夜视功能,或用于安全和监视。
import cv2
img = cv2.imread('image.jpg')
#applying filter
color_image = cv2.applyColorMap(img, cv2.COLORMAP_JET)
cv2.imshow('Image',color_image)
cv2.waitKey(0)
cv2.destroyAllWindows()卡通滤镜
使用我们举世闻名的 Cartoonizer 效果将任何照片变成卡通!只需单击一下即可了解为什么它是我们最喜爱的艺术类别。

这是读取图像后的片段代码,我们必须应用灰色,然后模糊图像。
import cv2
image = cv2.imread('image.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurImage = cv2.medianBlur(image, 1)
edges = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 9, 9)
color = cv2.bilateralFilter(image, 9, 200, 200)
cartoon = cv2.bitwise_and(color, color, mask = edges)
cv2.imshow('Image',cartoon)
cv2.waitKey(0)
cv2.destroyAllWindows()VSCO 滤镜
要创建 VSCO 风格的滤镜效果,您需要使用鲜艳的预设。类似 VSCO 的滤镜非常适合各种图像。让您的图像呈现出色彩鲜艳、充满活力的外观,非常适合自然和海滩场景等主题。

import cv2
import numpy as np
def colorful_vibrant_filter(image):"""Apply a colorful and vibrant filter to the input image.Args:image (numpy.ndarray): The input image.Returns:numpy.ndarray: The filtered image."""# Convert the image to HSV color spacehsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)# Increase the saturation by 50%hsv_image[..., 1] = np.clip(hsv_image[..., 1] * 1.5, 0, 255)# Increase the value (brightness) by 20%hsv_image[..., 2] = np.clip(hsv_image[..., 2] * 1.2, 0, 255)# Convert the image back to BGR color spacefiltered_image = cv2.cvtColor(hsv_image, cv2.COLOR_HSV2BGR)return filtered_image
# Load an example image
image = cv2.imread('image.jpg')
# Apply the colorful vibrant filter
filtered_image = colorful_vibrant_filter(image)
# Display the original and filtered images
cv2.imshow('Original Image', image)
cv2.imshow('Filtered Image', filtered_image)
cv2.waitKey(0)
cv2.destroyAllWindows()灰度滤镜
使用 Fotors 的“灰度”、“镀铬”和“黑白”选项,在几秒钟内将您的照片变成黑白色!“褪色白色”滤镜还添加了微妙的仿旧效果。

import cv2
def grayscale_filter(image):"""Apply a grayscale filter to the input image.Args:image (numpy.ndarray): The input image.Returns:numpy.ndarray: The grayscale image."""# Convert the image to grayscale using cv2.cvtColorgrayscale_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)return grayscale_image
# Load an example image
image = cv2.imread('image.jpg')
# Apply the grayscale filter
grayscale_image = grayscale_filter(image)
# Display the original and grayscale images
cv2.imshow('Original Image', image)
cv2.imshow('Grayscale Image', grayscale_image)
cv2.waitKey(0)
cv2.destroyAllWindows()油画滤镜
厌倦了必须打开 Photoshop 才能为照片添加油画滤镜?只需在“油画”下单击几下即可添加!“光泽”可让所有东西都呈现出绿色,非常适合绿叶照片。

import cv2
# Load the image
img = cv2.imread('image.jpg')
# Apply oil painting filter
output = cv2.stylization(img, sigma_s=60, sigma_r=0.6)
# Display the output
cv2.imshow('Oil Painting', output)
cv2.waitKey(0)
cv2.destroyAllWindows()这些图像滤镜提供了一种富有创意和艺术感的方式来增强和转换您的图像。使用 OpenCV 和 Python,用户可以轻松应用这些滤镜来创建各种时尚且具有视觉吸引力的转换效果,从热和卡通转换到充满活力的 VSCO 风格外观和经典的灰度转换。
二、MoveNet Lightning 和 CV 实现实时姿势检测
在本文中,我们将探讨如何使用 TensorFlow Lite 的 MoveNet Lightning 模型和 OpenCV 构建实时姿势检测系统。这个项目使我们能够使用网络摄像头检测身体关节并动态地可视化运动。

MoveNet Lightning 概述
MoveNet 是由 TensorFlow 开发的最先进的姿态估计模型,专为实时应用程序而设计。MoveNet 的 Lightning 变体针对速度和准确性进行了优化,使其适用于健身跟踪、运动分析等任务。
第 1 步:安装所需的库
在开始之前,请确保您已安装以下 Python 库:
pip install tensorflow numpy opencv-python matplotlib这些库对于加载 MoveNet 模型、处理视频帧和可视化结果至关重要。
第 2 步:加载 MoveNet 模型
首先,我们将加载 TensorFlow Lite MoveNet Lightning 模型并分配张量进行推理。
import tensorflow as tf
import numpy as np
import cv2# Load the TensorFlow Lite model
interpreter = tf.lite.Interpreter(model_path='3.tflite')
interpreter.allocate_tensors()第 3 步:定义辅助函数
为了可视化检测到的姿势,我们需要在每一帧上绘制关键点 (关节) 和连接 (骨骼)。
绘制关键点
def draw_keypoints(frame, keypoints, confidence_threshold):"""Draws keypoints on the frame if their confidence exceeds the threshold."""y, x, c = frame.shapeshaped = np.squeeze(np.multiply(keypoints, [y, x, 1]))for kp in shaped:ky, kx, kp_conf = kpif kp_conf > confidence_threshold:cv2.circle(frame, (int(kx), int(ky)), 4, (0, 255, 0), -1)绘制连接
EDGES = {(0, 1): 'm', (0, 2): 'c', (1, 3): 'm', (2, 4): 'c',(0, 5): 'm', (0, 6): 'c', (5, 7): 'm', (7, 9): 'm',(6, 8): 'c', (8, 10): 'c', (5, 6): 'y', (5, 11): 'm',(6, 12): 'c', (11, 12): 'y', (11, 13): 'm', (13, 15): 'm',(12, 14): 'c', (14, 16): 'c'
}def draw_connections(frame, keypoints, edges, confidence_threshold):"""Draws connections (edges) between keypoints if both exceed the threshold."""y, x, c = frame.shapeshaped = np.squeeze(np.multiply(keypoints, [y, x, 1]))for edge, color in edges.items():p1, p2 = edgey1, x1, c1 = shaped[p1]y2, x2, c2 = shaped[p2]if (c1 > confidence_threshold) & (c2 > confidence_threshold):cv2.line(frame, (int(x1), int(y1)), (int(x2), int(y2)), (0, 0, 255), 2)第 4 步:实时姿势检测
使用 OpenCV,我们将从网络摄像头捕获帧,并通过 MoveNet 处理它们以进行姿势检测。
# Initialize webcam capture
cap = cv2.VideoCapture(1) # Use '0' for the default camerawhile cap.isOpened():ret, frame = cap.read()if not ret:break# Preprocess the frame for MoveNetimg = frame.copy()img = tf.image.resize_with_pad(np.expand_dims(img, axis=0), 192, 192)input_image = tf.cast(img, dtype=tf.float32)# Get input and output tensor detailsinput_details = interpreter.get_input_details()output_details = interpreter.get_output_details()# Run inferenceinterpreter.set_tensor(input_details[0]['index'], np.array(input_image))interpreter.invoke()keypoints_with_scores = interpreter.get_tensor(output_details[0]['index'])# Draw connections and keypoints on the framedraw_connections(frame, keypoints_with_scores, EDGES, 0.4)draw_keypoints(frame, keypoints_with_scores, 0.4)# Display the framecv2.imshow('MoveNet Lightning', frame)if cv2.waitKey(10) & 0xFF == ord('q'):breakcap.release()
cv2.destroyAllWindows()
如何运行
- 模型加载:TensorFlow Lite MoveNet 模型已加载并准备好进行推理。
- 帧预处理:每个网络摄像头帧的大小都会调整并填充,以匹配模型的预期输入尺寸。
- 姿势检测:该模型预测每帧的关键点及其置信度分数。
- 可视化:关键点和连接叠加在框架上,实时动态更新。
应用
该项目具有多种应用:
- 健身追踪和体型校正。
- 交互式系统的手势识别。
- 运动中的实时运动分析。
通过利用 TensorFlow Lite 的 MoveNet 和 OpenCV,我们创建了一个功能强大且高效的姿势检测系统。这种设置是轻量级的,非常适合边缘设备上的实时应用程序。通过将该系统集成到健身或游戏应用程序中来进一步探索!
源码下载:
https://github.com/iamramzan/Real-Time-Pose-Detection-Using-MoveNet-Lightning-and-OpenCV三、OpenCV修改一行代码,将图像匹配效果提升14%
OpenCV发布了4.5.1,包含了BEBLID算子,一个新的局部特征描述符,超越ORB。
OpenCV 4.5.1中最令人兴奋的特性之一是BEBLID (Boosted Efficient Binary Local Image Descriptor),一个新的描述符能够提高图像匹配精度,同时减少执行时间!这篇文章将向你展示这个魔法是如何实现的。所有的源代码都在这个GitHub库中:https://github.com/iago-suarez/beblid-opencv-demo/blob/main/demo.ipynb
在这个例子中,我们将匹配这两个视角不一样的图像:

首先,确保安装了正确的OpenCV版本是很重要的。在你喜欢的环境中,你可以通过以下方式安装并检查OpenCV Contrib版本:
pip install "opencv-contrib-python>=4.5.1"
python
>>> import cv2 as cv
>>> print(f"OpenCV Version: {cv.__version__}")
OpenCV Version: 4.5.1在Python中加载这两个图像所需的代码是:
import cv2 as cv# Load grayscale images
img1 = cv.imread("graf1.png", cv.IMREAD_GRAYSCALE)
img2 = cv.imread("graf3.png", cv.IMREAD_GRAYSCALE)if img1 is None or img2 is None:print('Could not open or find the images!')exit(0)为了评估我们的图像匹配程序,我们需要在两幅图像之间进行正确的(即ground truth)几何变换。它是一个称为单应性的3x3矩阵,当我们从第一个图像中乘以一个点(在齐次坐标中)时,它返回第二个图像中这个点的坐标。加载这个矩阵:
# Load homography (geometric transformation between image)
fs = cv.FileStorage("H1to3p.xml", cv.FILE_STORAGE_READ)
homography = fs.getFirstTopLevelNode().mat()
print(f"Homography from img1 to img2:\n{homography}")下一步是检测图像中容易在其他图像中找到的部分:Local image features。在本例中,我们将使用ORB,一个快速可靠的检测器来检测角点。ORB检测到强角,在不同的尺度上比较它们,并使用FAST或Harris响应来挑选最好的。它还使用局部patch的一阶矩来寻找每个角点的方向。我们检测每个图像中最多10000个角点:
detector = cv.ORB_create(10000)
kpts1 = detector.detect(img1, None)
kpts2 = detector.detect(img2, None)在下面的图片中,你可以看到500个用绿点标记的检测响应最强的角点特征:

很好,现在是时候以一种我们可以在另一张图中找到它们的方式来表示这些关键点了。这个步骤被称为description,因为每个角点的局部patch中的纹理表示 为图像上不同操作得到的数字的向量。有很多的描述符可以用,但如果我们想要一些精确的东西,即使在移动电话或低功耗设备上也能实时运行,OpenCV有两个重要的方法:
- ORB(导向快速和旋转简短):一个经典的方法,有10年的历史,工作相当好。
- BEBLID (Boosted Efficient Binary Local Image Descriptor):2020年引入的一个新的描述符,已被证明在几个任务中改善了ORB。由于BEBLID适用于多种检测方法,所以必须将ORB关键点的比例设置为0.75~1。
# Comment or uncomment to use ORB or BEBLID
descriptor = cv.xfeatures2d.BEBLID_create(0.75)
# descriptor = cv.ORB_create()
kpts1, desc1 = descriptor.compute(img1, kpts1)
kpts2, desc2 = descriptor.compute(img2, kpts2)现在可以匹配这两个图像的描述符来建立对应关系了。让我们使用暴力求解算法,它基本上比较了第一张图像中的每个描述符和第二张图像中的所有描述符。当我们处理二进制描述符时,使用汉明距离进行比较,即计算每对描述符之间不同的比特数。
这里还使用了一个叫做比率检验的小技巧。它不仅确保描述符1和2彼此相似,而且确保没有其他像2一样接近1的描述符。
matcher = cv.DescriptorMatcher_create(cv.DescriptorMatcher_BRUTEFORCE_HAMMING)
nn_matches = matcher.knnMatch(desc1, desc2, 2)
matched1 = []
matched2 = []
nn_match_ratio = 0.8 # Nearest neighbor matching ratio
for m, n in nn_matches:if m.distance < nn_match_ratio * n.distance:matched1.append(kpts1[m.queryIdx])matched2.append(kpts2[m.trainIdx])因为我们知道正确的几何变换,让我们检查有多少匹配是正确的(inliners)。如果图像2中的点和从图像1投射到图像2的点距离小于2.5像素,我们认为匹配是有效的。
inliers1 = []
inliers2 = []
good_matches = []
inlier_threshold = 2.5 # Distance threshold to identify inliers with homography check
for i, m in enumerate(matched1):# Create the homogeneous pointcol = np.ones((3, 1), dtype=np.float64)col[0:2, 0] = m.pt# Project from image 1 to image 2col = np.dot(homography, col)col /= col[2, 0]# Calculate euclidean distancedist = sqrt(pow(col[0, 0] - matched2[i].pt[0], 2) + pow(col[1, 0] - matched2[i].pt[1], 2))if dist < inlier_threshold:good_matches.append(cv.DMatch(len(inliers1), len(inliers2), 0))inliers1.append(matched1[i])inliers2.append(matched2[i])现在我们在inliers1和inliers2变量中有了正确的匹配,我们可以使用cv.drawMatches定性地评估结果。每一个对应点可以在更高级别的任务上对我们有帮助,比如homography estimation,Perspective-n-Point, plane tracking, real-time pose estimation 以及 images stitching。

由于很难定性地比较这种结果,让我们绘制一些定量的评价指标。最能反映描述符可靠程度的指标是inlier的百分比:
![]()
Matching Results (BEBLID)
*******************************
# Keypoints 1: 9105
# Keypoints 2: 9927
# Matches: 660
# Inliers: 512
# Percentage of Inliers: 77.57%使用BEBLID描述符获得77.57%的inliers。如果我们在描述符部分注释掉BEBLID并取消注释ORB描述符,结果下降到63.20%:
# Comment or uncomment to use ORB or BEBLID
# descriptor = cv.xfeatures2d.BEBLID_create(0.75)
descriptor = cv.ORB_create()
kpts1, desc1 = descriptor.compute(img1, kpts1)
kpts2, desc2 = descriptor.compute(img2, kpts2)Matching Results (ORB)
*******************************
# Keypoints 1: 9105
# Keypoints 2: 9927
# Matches: 780
# Inliers: 493
# Percentage of Inliers: 63.20%总之,只需更改一行代码,将ORB描述符替换为BEBLID ,就可以将这两个图像的匹配结果提高14%。这在需要局部特征匹配的高级任务中会产生很大影响,所以不要犹豫,试试BEBLID。
英文原文:https://towardsdatascience.com/improving-your-image-matching-results-by-14-with-one-line-of-code-b72ae9ca2b73
相关文章:

51c视觉~CV~合集10
我自己的原文哦~ https://blog.51cto.com/whaosoft/13241694 一、CV创建自定义图像滤镜 热图滤镜 这组滤镜提供了各种不同的艺术和风格化光学图像捕捉方法。例如,热滤镜会将图像转换为“热图”,而卡通滤镜则提供生动的图像,这些图像看起来…...

如何安全地管理Spring Boot项目中的敏感配置信息
在开发Spring Boot应用时,我们经常需要处理一些敏感的配置信息,比如数据库密码、API密钥等。以下是一个最佳实践方案: 1. 创建配置文件 application.yml(版本控制) spring:datasource:url: ${MYSQL_URL:jdbc:mysql…...

Docker小游戏 | 使用Docker部署2048网页小游戏
Docker小游戏 | 使用Docker部署2048网页小游戏 前言项目介绍项目简介项目预览二、系统要求环境要求环境检查Docker版本检查检查操作系统版本三、部署2048网页小游戏下载镜像创建容器检查容器状态检查服务端口安全设置四、访问2048网页小游戏五、总结前言 在当今快速发展的技术世…...

RabbitMQ深度探索:消息幂等性问题
RabbitMQ 消息自动重试机制: 让我们消费者处理我们业务代码的时候,如果抛出异常的情况下,在这时候 MQ 会自动触发重试机制,默认的情况下 RabbitMQ 时无限次数的重试需要认为指定重试次数限制问题 在什么情况下消费者实现重试策略…...

Linux网络 | 进入数据链路层,学习相关协议与概念
前言:本节内容进入博主讲解的网络层级中的最后一层:数据链路层。 首先博主还是会线代友友们认识一下数据链路层的报文。 然后会带大家重新理解一些概念,比如局域网交换机等等。然后就是ARP协议。 讲完这些, 本节任务就算结束。 那…...
——flink-cdc监听mysql binlog并同步数据至elastic-search和更新redis缓存)
芝法酱学习笔记(2.6)——flink-cdc监听mysql binlog并同步数据至elastic-search和更新redis缓存
一、需求背景 在有的项目中,尤其是进销存类的saas软件,一开始为了快速把产品做出来,并没有考虑缓存问题。而这类软件,有着复杂的业务逻辑。如果想在原先的代码中,添加redis缓存,改动面将非常大,…...
--性能监控系统详解)
JavaScript系列(58)--性能监控系统详解
JavaScript性能监控系统详解 📊 今天,让我们深入探讨JavaScript的性能监控系统。性能监控对于保证应用的稳定性和用户体验至关重要。 性能监控基础概念 🌟 💡 小知识:JavaScript性能监控是指通过收集和分析各种性能指…...

GESP2023年12月认证C++六级( 第三部分编程题(1)闯关游戏)
参考程序代码: #include <cstdio> #include <cstdlib> #include <cstring> #include <algorithm> #include <string> #include <map> #include <iostream> #include <cmath> using namespace std;const int N 10…...

git 新项目
新项目git 新建的项目如何进行git 配置git git config --global user.name "cc" git config --global user.email ccexample.com配置远程仓库路径 // 添加 git remote add origin http://gogs/cc/mc.git //如果配错了,删除 git remote remove origin初…...
)
系统URL整合系列视频一(需求方案)
视频 系统URL整合系列视频一(需求方案) 视频介绍 (全国)某大型分布式系统Web资源URL整合需求实现方案讲解。当今社会各行各业对软件系统的web资源访问权限控制越来越严格,控制粒度也越来越细。安全级别提高的同时也增…...

Vue.js 使用组件库构建 UI
Vue.js 使用组件库构建 UI 在 Vue.js 项目中,构建漂亮又高效的用户界面(UI)是很重要的一环。组件库就是你开发 UI 的好帮手,它可以大大提高开发效率,减少重复工作,还能让你的项目更具一致性和专业感。今天…...

计算图 Compute Graph 和自动求导 Autograd | PyTorch 深度学习实战
前一篇文章,Tensor 基本操作5 device 管理,使用 GPU 设备 | PyTorch 深度学习实战 本系列文章 GitHub Repo: https://github.com/hailiang-wang/pytorch-get-started PyTorch 计算图和 Autograd 微积分之于机器学习Computational Graphs 计算图Autograd…...

51单片机入门_05_LED闪烁(常用的延时方法:软件延时、定时器延时;while循环;unsigned char 可以表示的数字是0~255)
本篇介绍编程实现LED灯闪烁,需要学到一些新的C语言知识。由于单片机执行的速度是非常快的,如果不进行延时的话,人眼是无法识别(停留时间要大于20ms)出LED灯是否在闪烁所以需要学习如何实现软件延时。另外IO口与一个字节位的数据对应关系。 文…...

如何获取sql数据中时间的月份、年份(类型为date)
可用自带的函数month来实现 如: 创建表及插入数据: create table test (id int,begindate datetime) insert into test values (1,2015-01-01) insert into test values (2,2015-02-01) 执行sql语句,获取月份: select MONTH(begindate)…...

【单层神经网络】softmax回归的从零开始实现(图像分类)
softmax回归 该回归分析为后续的多层感知机做铺垫 基本概念 softmax回归用于离散模型预测(分类问题,含标签) softmax运算本质上是对网络的多个输出进行了归一化,使结果有一个统一的判断标准,不必纠结为什么要这么算…...

使用开源项目:pdf2docx,让PDF转换为Word
目录 1.安装python 2.安装 pdf2docx 3.使用 pdf2docx 转换 PDF 到 Word pdf2docx:GitCode - 全球开发者的开源社区,开源代码托管平台 环境:windows电脑 1.安装python Download Python | Python.org 最好下载3.8以上的版本 安装时记得选择上&#…...

保姆级教程Docker部署KRaft模式的Kafka官方镜像
目录 一、安装Docker及可视化工具 二、单节点部署 1、创建挂载目录 2、运行Kafka容器 3、Compose运行Kafka容器 4、查看Kafka运行状态 三、集群部署 四、部署可视化工具 1、创建挂载目录 2、运行Kafka-ui容器 3、Compose运行Kafka-ui容器 4、查看Kafka-ui运行状态 …...

ChatGPT提问技巧:行业热门应用提示词案例--咨询法律知识
ChatGPT除了可以协助办公,写作文案和生成短视频脚本外,和还可以做为一个法律工具,当用户面临一些法律知识盲点时,可以向ChatGPT咨询获得解答。赋予ChatGPT专家的身份,用户能够得到较为满意的解答。 1.咨询法律知识 举…...

openRv1126 AI算法部署实战之——Tensorflow模型部署实战
在RV1126开发板上部署Tensorflow算法,实时目标检测RTSP传输。视频演示地址 rv1126 yolov5 实时目标检测 rtsp传输_哔哩哔哩_bilibili 一、准备工作 从官网下载tensorflow模型和数据集 手动在线下载: https://github.com/tensorflow/models/b…...

STM32 TIM定时器配置
TIM简介 TIM(Timer)定时器 定时器可以对输入的时钟进行计数,并在计数值达到设定值时触发中断 16位计数器、预分频器、自动重装寄存器的时基单元,在72MHz计数时钟下可以实现最大59.65s的定时 不仅具备基本的定时中断功能ÿ…...
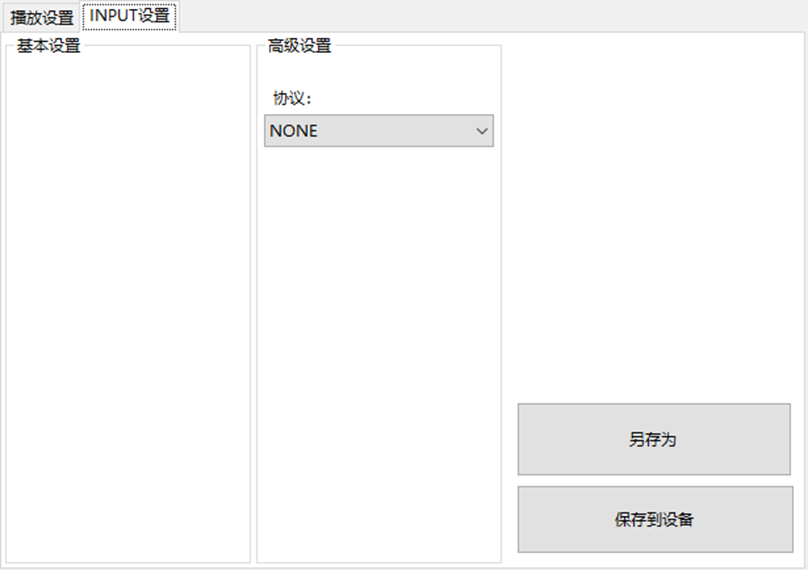
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器的上位机配置操作说明
LBE-LEX系列工业语音播放器|预警播报器|喇叭蜂鸣器专为工业环境精心打造,完美适配AGV和无人叉车。同时,集成以太网与语音合成技术,为各类高级系统(如MES、调度系统、库位管理、立库等)提供高效便捷的语音交互体验。 L…...

Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以?
Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以? 在 Golang 的面试中,map 类型的使用是一个常见的考点,其中对 key 类型的合法性 是一道常被提及的基础却很容易被忽视的问题。本文将带你深入理解 Golang 中…...
使用分级同态加密防御梯度泄漏
抽象 联邦学习 (FL) 支持跨分布式客户端进行协作模型训练,而无需共享原始数据,这使其成为在互联和自动驾驶汽车 (CAV) 等领域保护隐私的机器学习的一种很有前途的方法。然而,最近的研究表明&…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...

【算法训练营Day07】字符串part1
文章目录 反转字符串反转字符串II替换数字 反转字符串 题目链接:344. 反转字符串 双指针法,两个指针的元素直接调转即可 class Solution {public void reverseString(char[] s) {int head 0;int end s.length - 1;while(head < end) {char temp …...
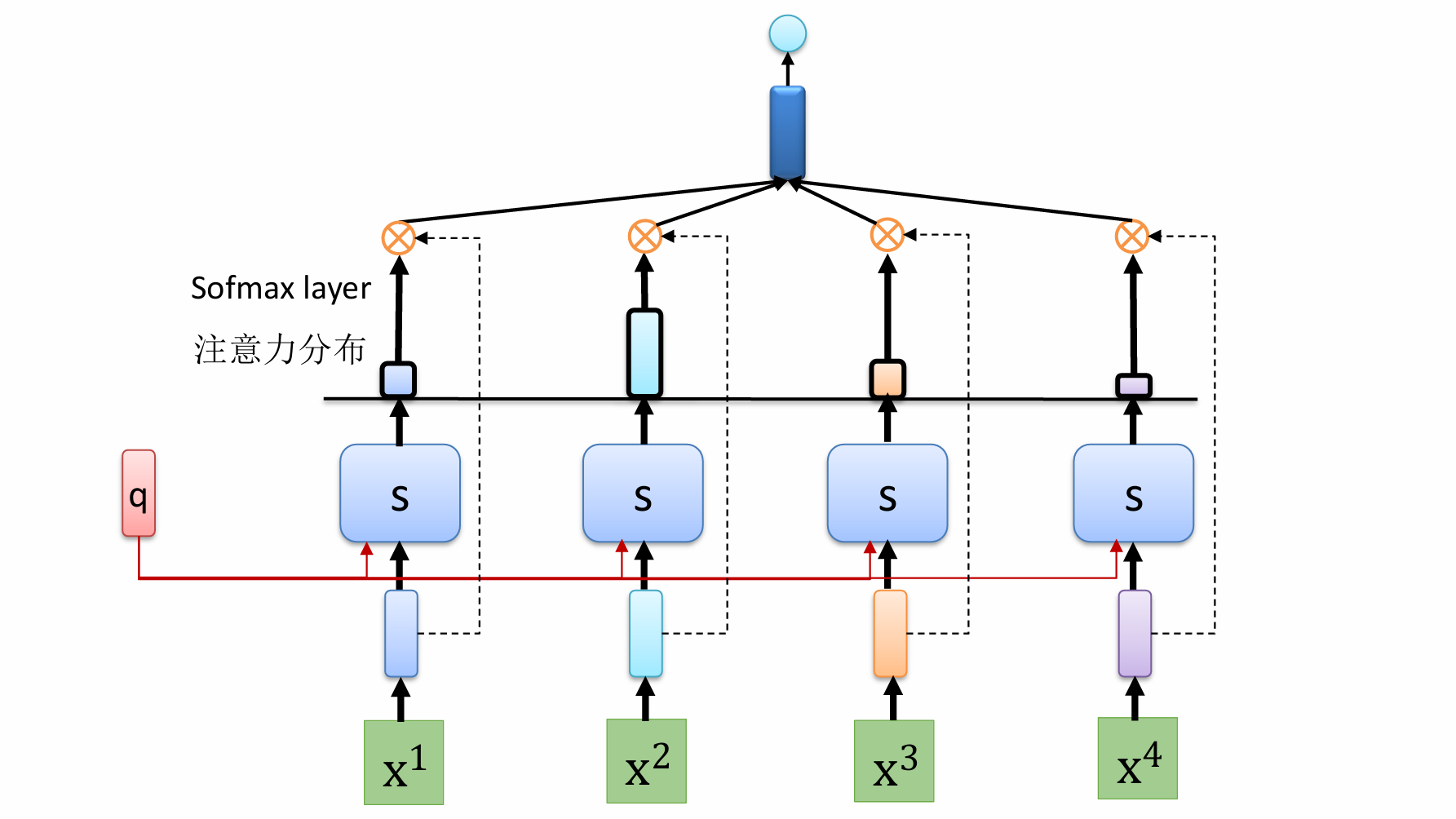
自然语言处理——循环神经网络
自然语言处理——循环神经网络 循环神经网络应用到基于机器学习的自然语言处理任务序列到类别同步的序列到序列模式异步的序列到序列模式 参数学习和长程依赖问题基于门控的循环神经网络门控循环单元(GRU)长短期记忆神经网络(LSTM)…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...
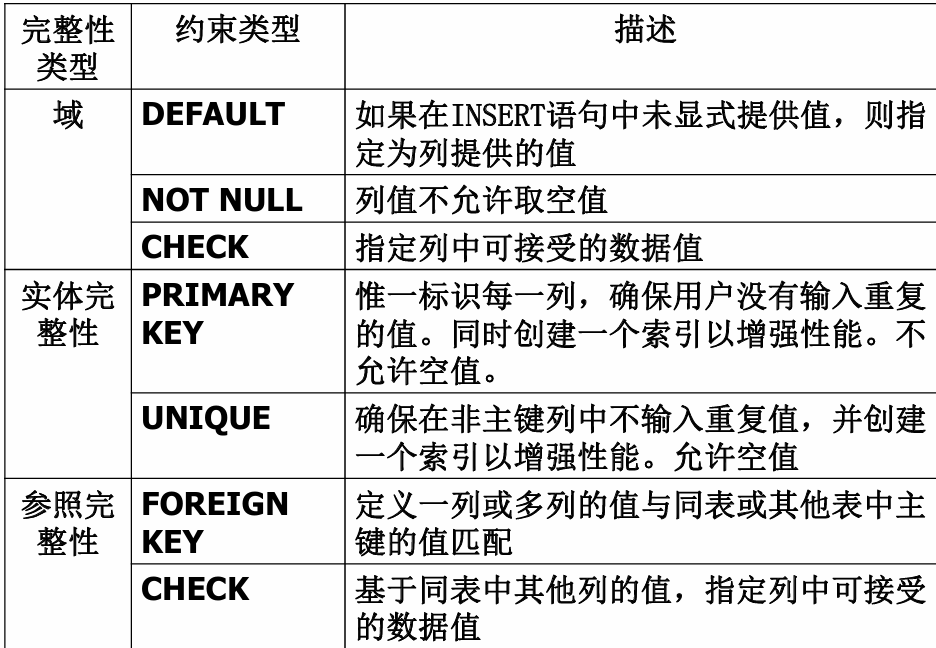
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

C#中的CLR属性、依赖属性与附加属性
CLR属性的主要特征 封装性: 隐藏字段的实现细节 提供对字段的受控访问 访问控制: 可单独设置get/set访问器的可见性 可创建只读或只写属性 计算属性: 可以在getter中执行计算逻辑 不需要直接对应一个字段 验证逻辑: 可以…...

MySQL 8.0 事务全面讲解
以下是一个结合两次回答的 MySQL 8.0 事务全面讲解,涵盖了事务的核心概念、操作示例、失败回滚、隔离级别、事务性 DDL 和 XA 事务等内容,并修正了查看隔离级别的命令。 MySQL 8.0 事务全面讲解 一、事务的核心概念(ACID) 事务是…...