STM32 学习笔记_7 定时器中断:输出比较
输出比较
电机相关比较重要。
OC Output Compare(IC 是输入捕获,CC代指这两个单元),用于输出一定频率和占空比的PWM波形。
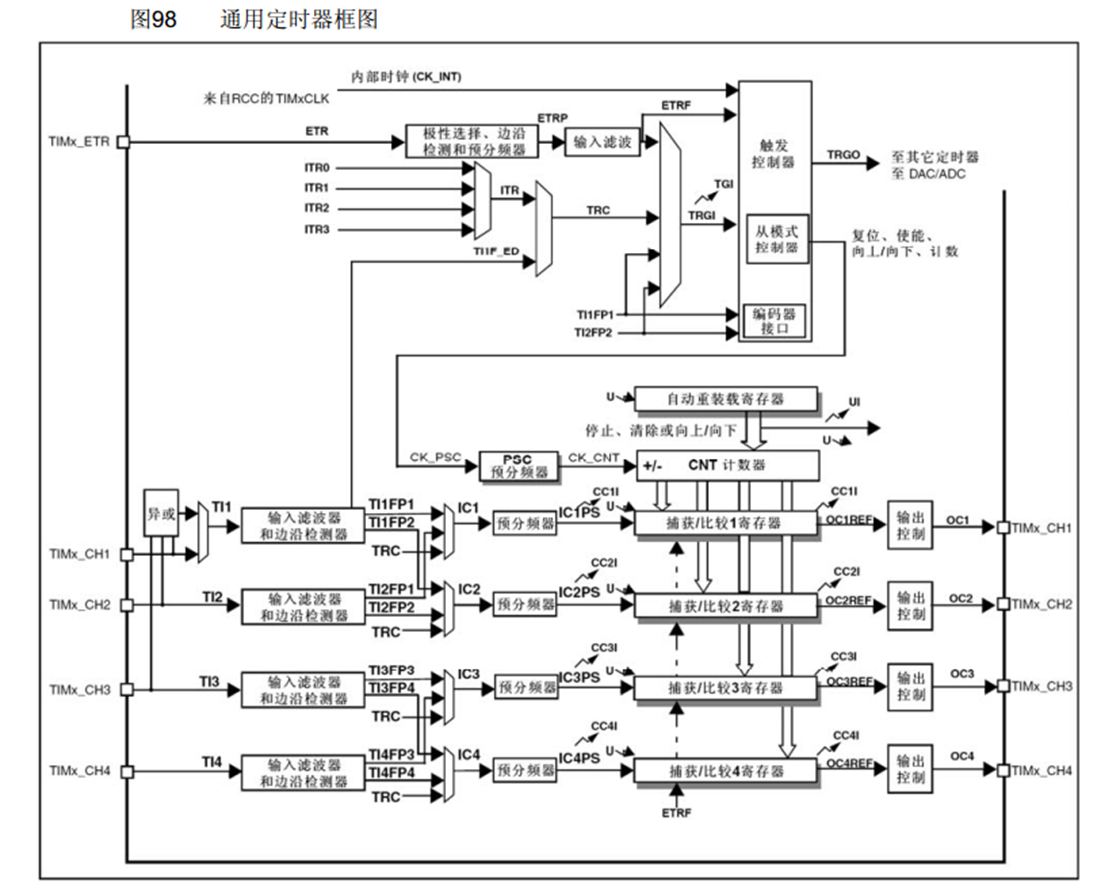
右下角四个就是CCR。只有通用计时器和高级计时器有,共用一个cnt计数器,高级计数器的前三个ccr寄存器还有死区比较和互补输出功能,可以驱动三相电机。
PWM(Pulse Width Modulation)脉冲宽度调制,在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域。
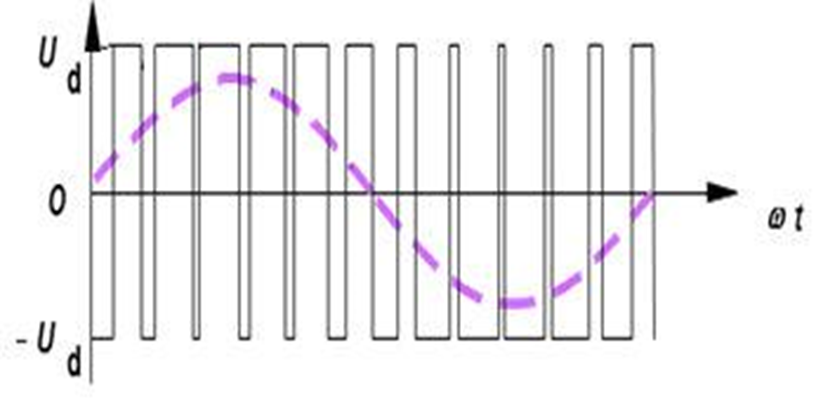
按一定频率置0置1,可以改变电机综合速度。LED也是,我们人眼看着就觉得灯有亮度,实际上就是按一定频率闪烁就会呈现不同的亮度。
周期Ts,占空比Ton/Ts(置1的时间占总周期比例),频率=周期倒数,分辨率是占空比变化步距。
输入模式:
| 模式 | 描述 |
|---|---|
| 冻结 | CNT=CCR时,REF保持为原状态 |
| 匹配时置有效电平 | CNT=CCR时,REF置有效电平 |
| 匹配时置无效电平 | CNT=CCR时,REF置无效电平 |
| 匹配时电平翻转 | CNT=CCR时,REF电平翻转 |
| 强制为无效电平 | CNT与CCR无效,REF强制为无效电平 |
| 强制为有效电平 | CNT与CCR无效,REF强制为有效电平 |
| PWM模式1 | 向上计数:CNT<CCR时,REF置有效电平,CNT≥CCR时,REF置无效电平 向下计数:CNT>CCR时,REF置无效电平,CNT≤CCR时,REF置有效电平 |
| PWM模式2 | 向上计数:CNT<CCR时,REF置无效电平,CNT≥CCR时,REF置有效电平 向下计数:CNT>CCR时,REF置有效电平,CNT≤CCR时,REF置无效电平 |
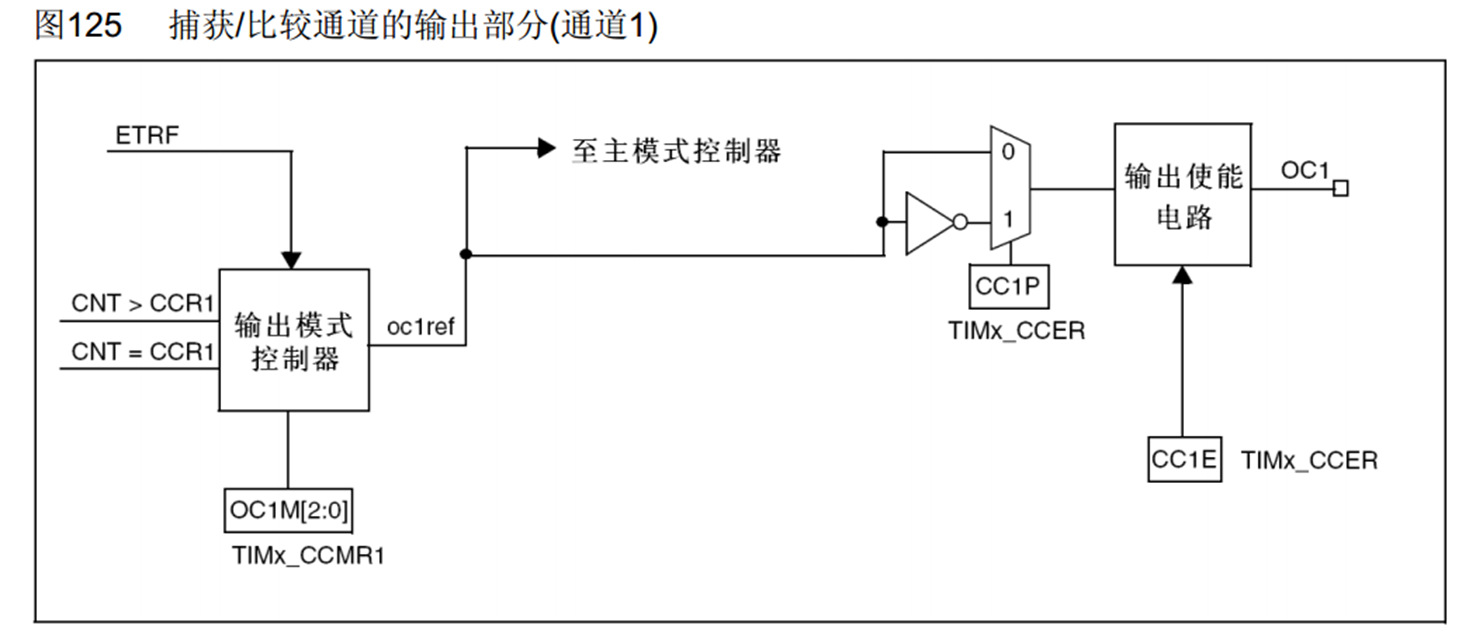
强制模式比如断开输入的时候。
TIMx_CCER里也可以设置极性。
整体处理逻辑:
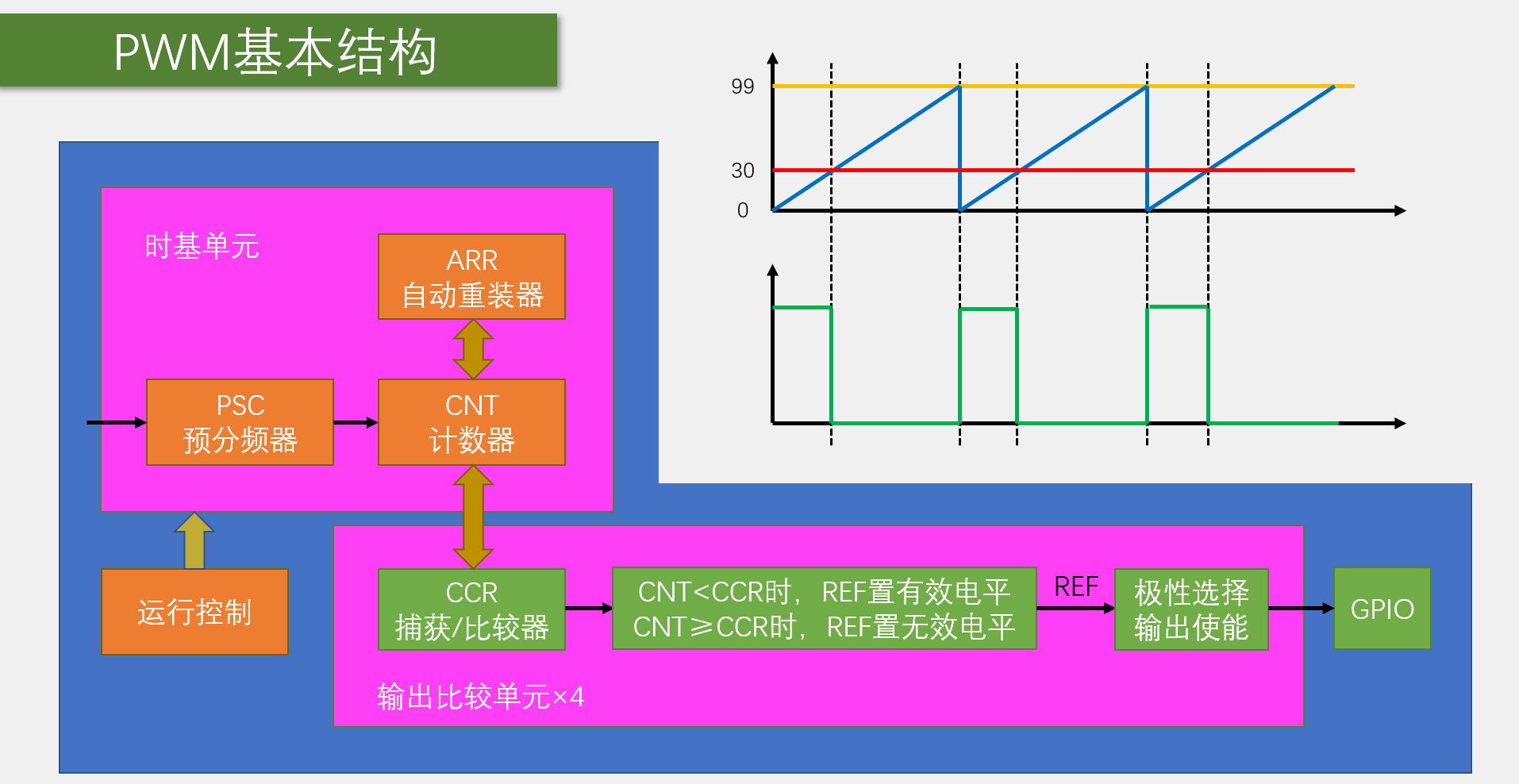
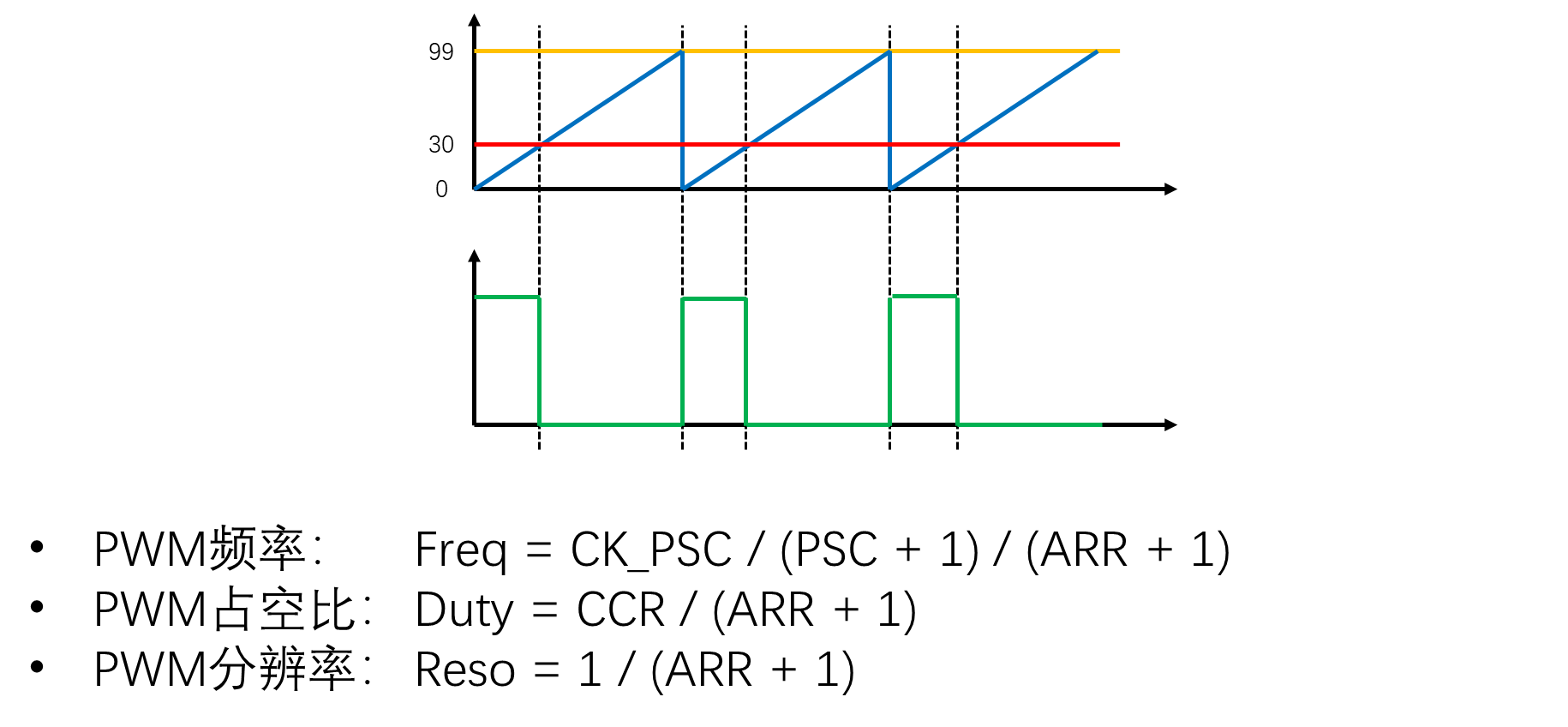
频率周期和普通定时器一样,占空比也很好理解。
分辨率就是arr的最小值的倒数。
至于高级计时器,暂时简单了解其区别即可:
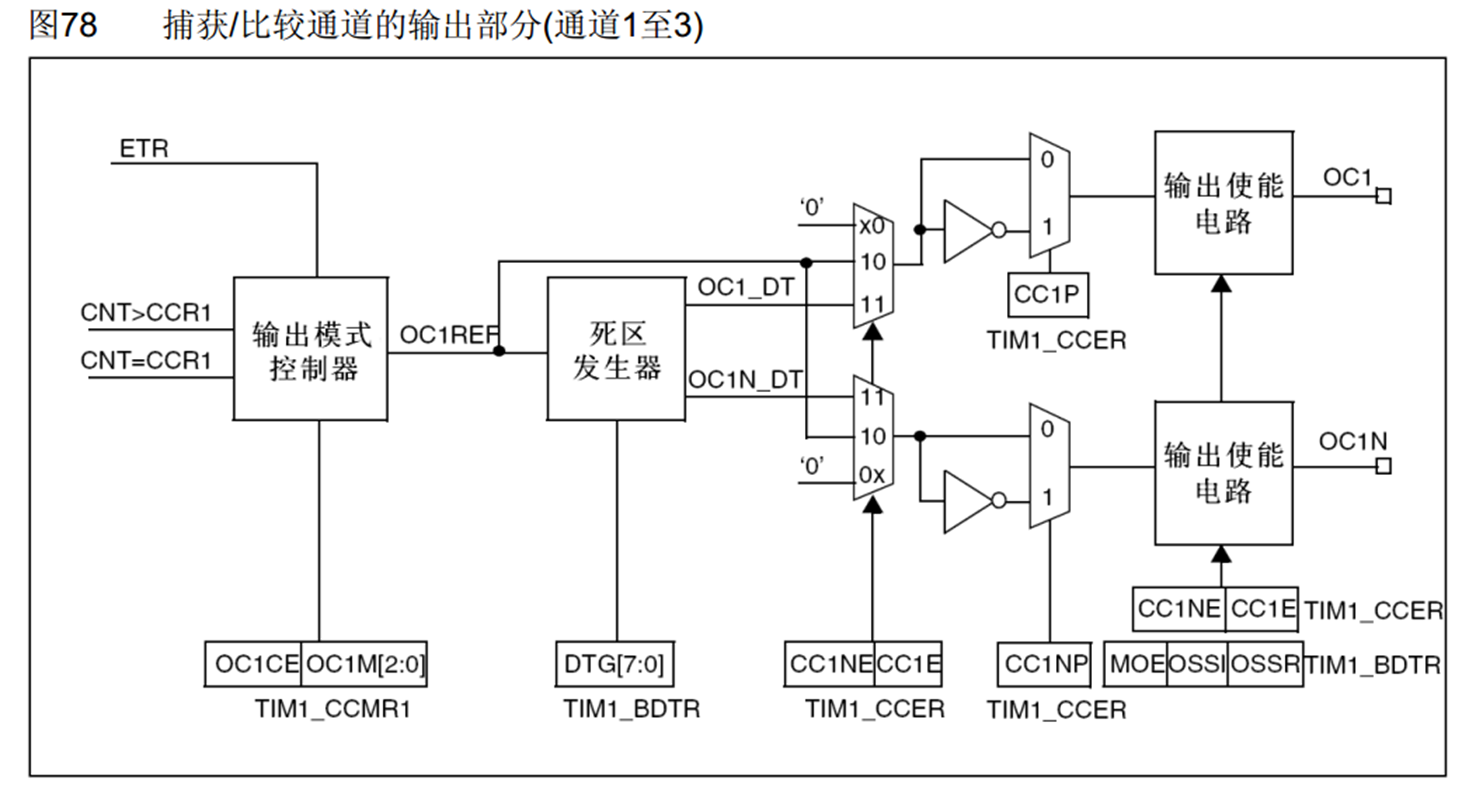
两个互补输出可以接到推挽电路上,死区生成电路使得两管切换有一定延迟。
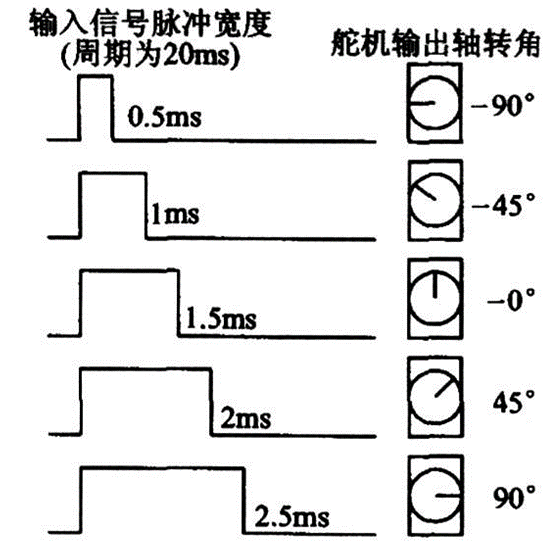
舵机:输入一个角度,舵机停止在固定角度。周期20ms,高电平宽度0.5-2.5ms。
舵机三个角,±极,信号线。(5V)信号线内部有驱动电路,所以可以直接接。
直流电机正向流正向转,反向电流反向转。无法直接驱动,需要依靠 TB6612 芯片驱动。
由两个推挽电路构成,一个H型电路,中间是电机。电流从左上到右下和右上到左下正好流经中间是相反的。
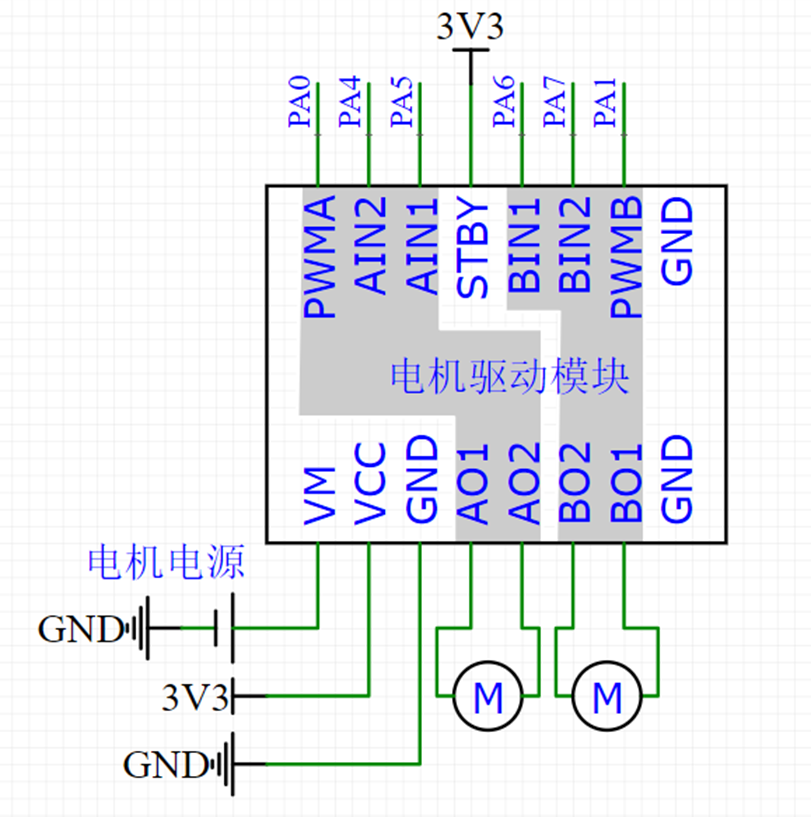
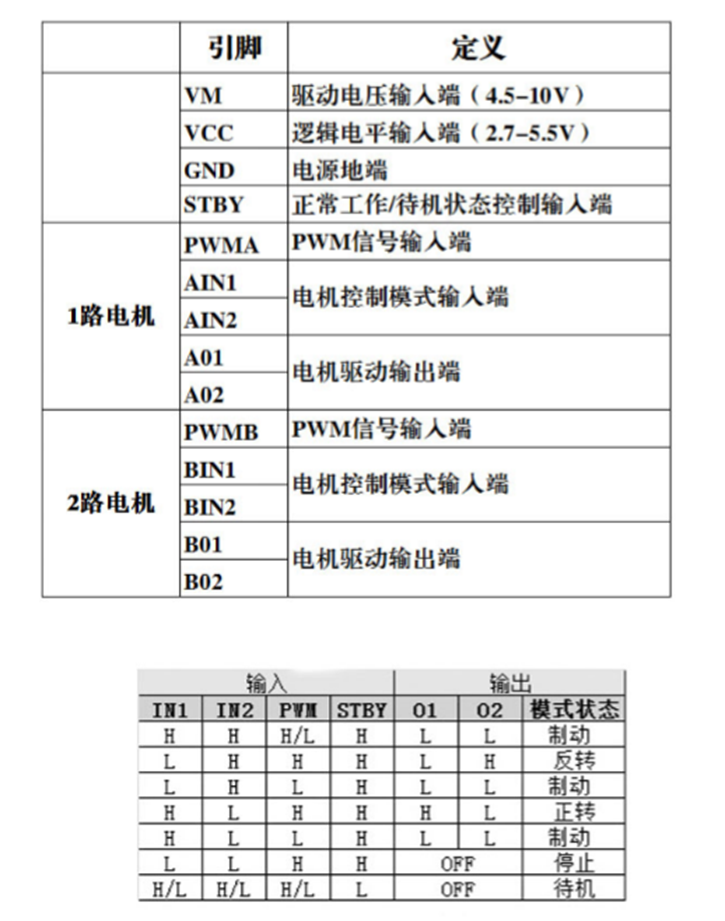
VM:驱动电路。
VCC:控制电路,比如我们32的3.3v。
PWMA PWMB是两个信号端,另外两个引脚可以接任意GPIO口。PWM 控制频率的改变,IN一直保持一个状态即可。
STNDBY 待机控制引脚,接地待机,接VCC工作。
代码:PWM LED呼吸灯
打开TIM GPIO,配置时基单元,配置输出比较单元(CCR值,模式,极性选择,使能输出),配置推挽输出GPIO,启动计数器。
函数:

初始化和赋初值。

强制输出,但是可以被占空比100% 0%替代,所以不常用。

先加载到影子寄存器中。并不会立刻更新ccr。

快速使能,清除ref。

设置输出通道极性,N是互补。这里的设置在初始化时就全做了,这些函数是可以单独修改的。

单独设置输出使能参数。

单独设置输出比较模式。

单独修改ccr寄存器,这个比较重要,比如呼吸灯,占空比是一直改变的。

这个是使能高级定时器会用。
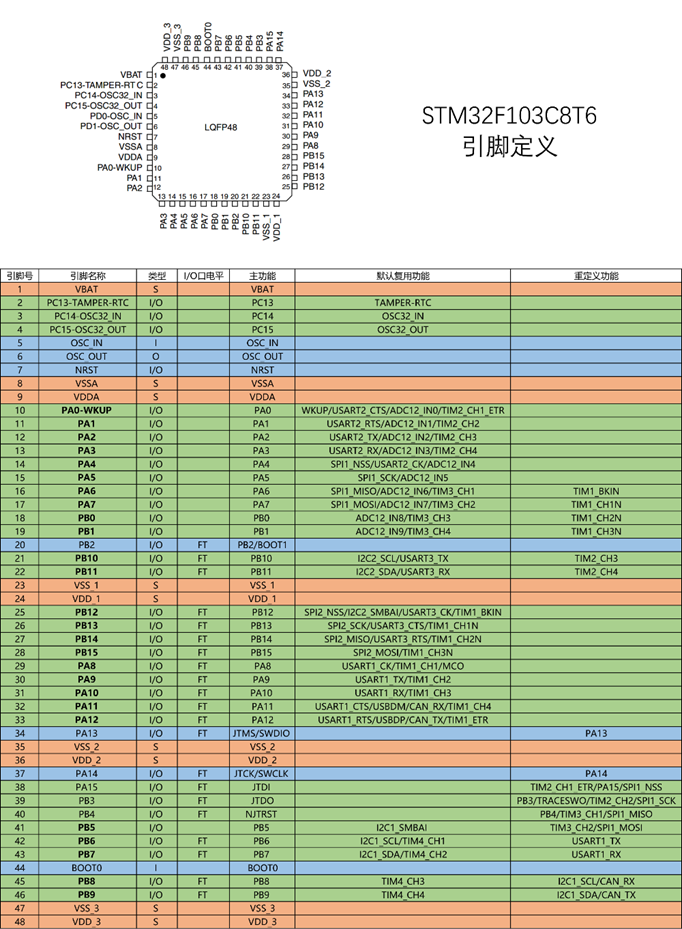
这里选用哪个引脚是有依据的:
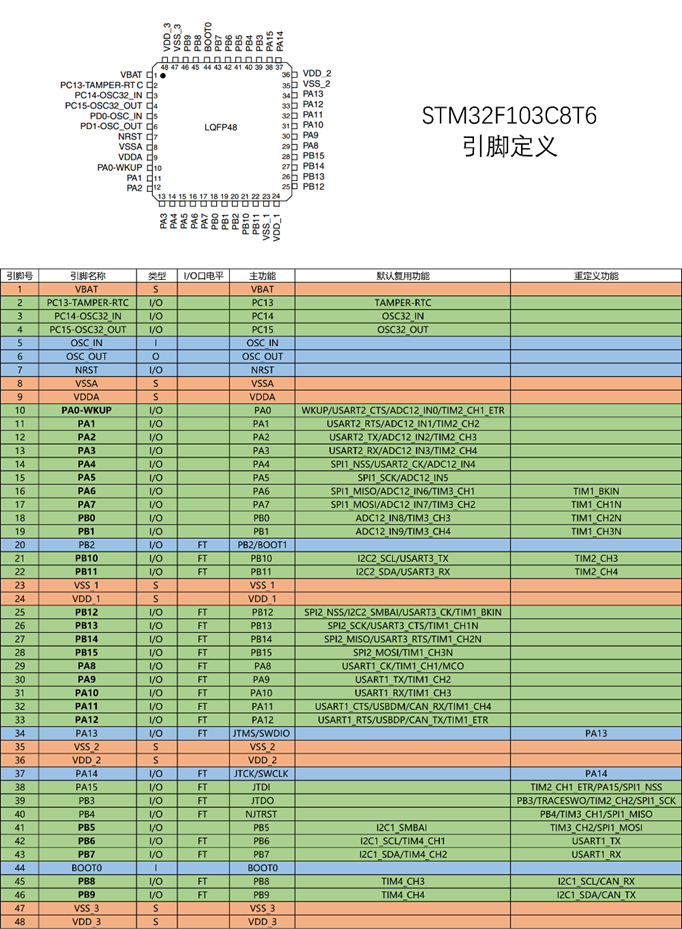
PA0是TIM2,CH1的引脚。也可以用AFIO复用其他引脚,避免冲突。
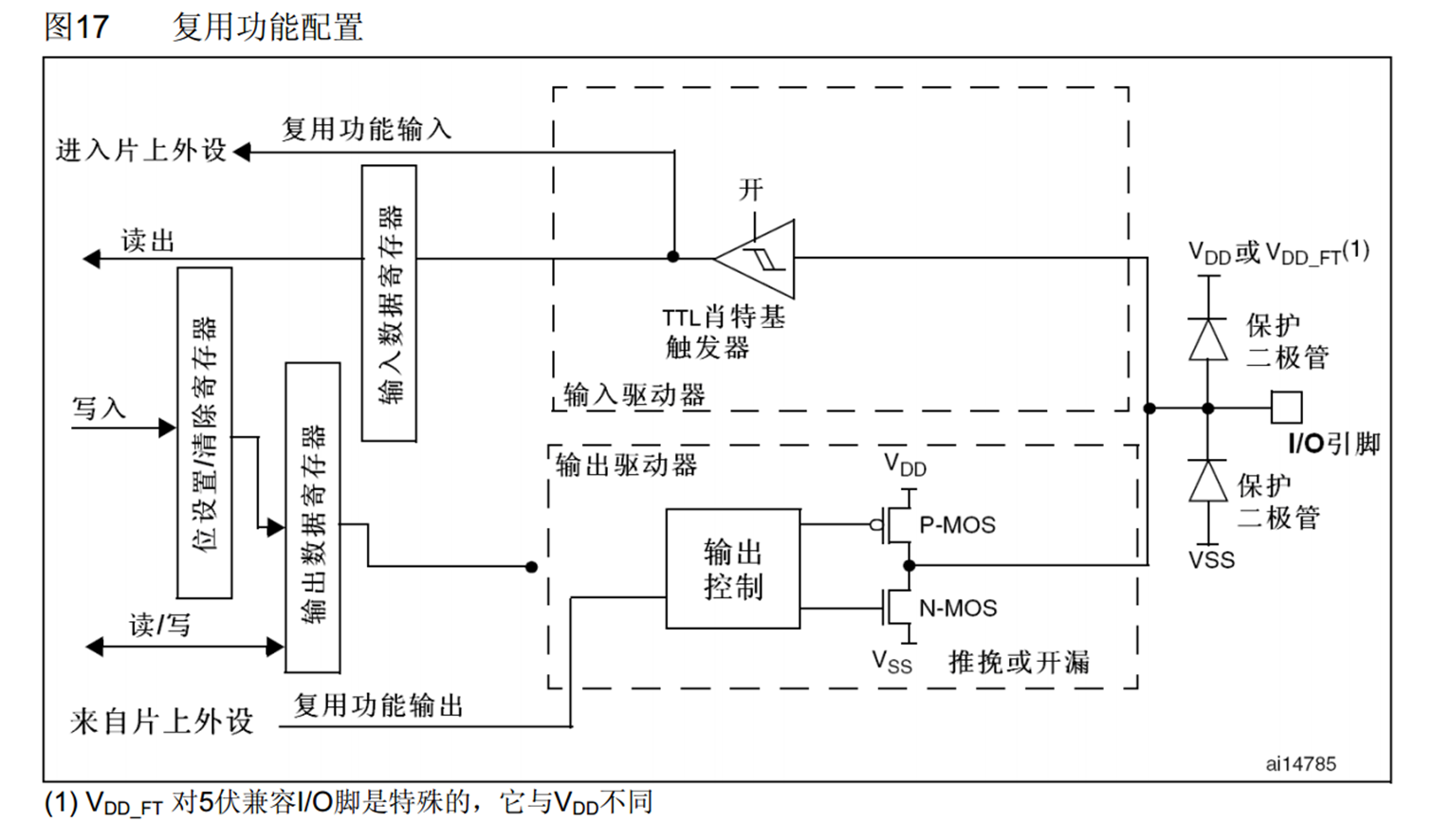
GPIO 要设置成复用功能 AF_PP 方可断开数据寄存器引脚,连接复用功能。
首先我们写一个简单的初始化函数,给定ccr寄存器值,让pwm输出是不会变化的固定值,这样显示的结果是led的亮度随着我们给的ccr值而变亮/暗。
void PWM_Init(void){RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period=100-1;TIM_TimeBaseInitStructure.TIM_Prescaler=720-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//PA0对应定时器2,oc channel1.TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//防止漏赋初值出错,而且再更改想改的赋值简单一些TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse=50;//ccrTIM_OC1Init(TIM2,&TIM_OCInitStructure);TIM_Cmd(TIM2,ENABLE);
}
设置周期100,ccr的值/100就是占空比,当前设置为50%亮度。设置10就是10%亮度。
用 keil 自带示波器看一下a0输出波形:
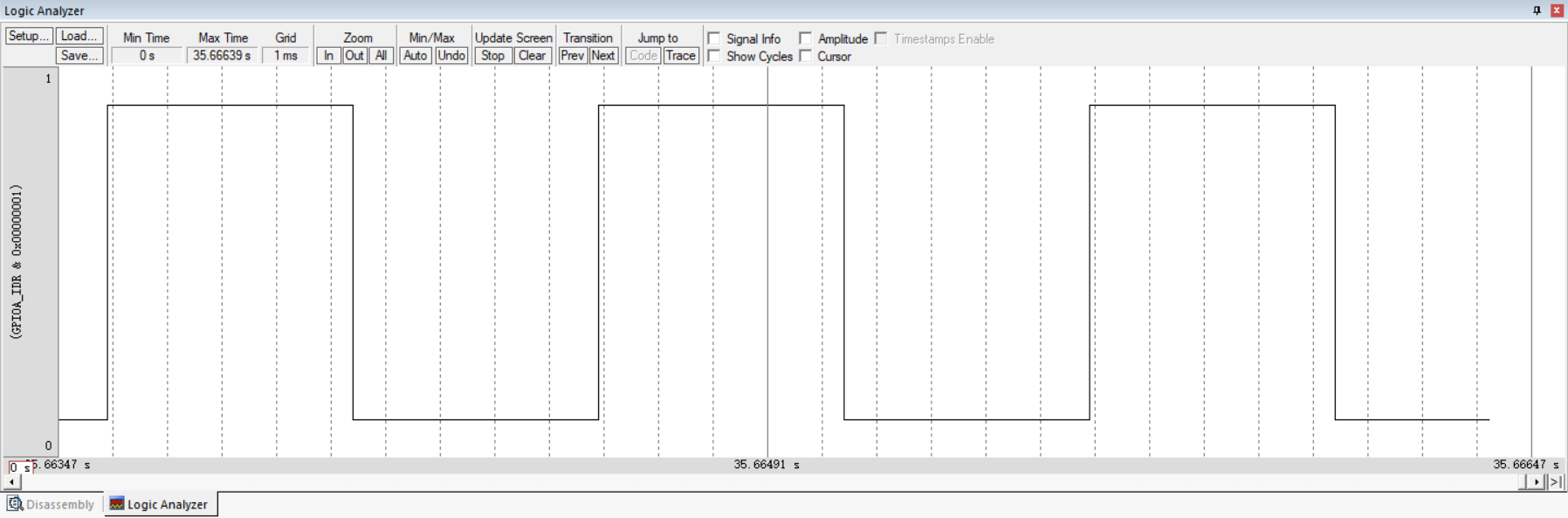
可以通过 TIM_SetCompare1(TIM2,i); 改变ccr值。
while(1){for(i=0;i<100;i++){TIM_SetCompare1(TIM2,i);Delay_ms(10);}for(i=100;i>0;i--){TIM_SetCompare1(TIM2,i);Delay_ms(10);}}
引脚重映射
如图,TIM2_CH1可以重映射到PA15上。
首先需要开启 AFIO, RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
前面介绍过 AFIO 重映射函数:void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState) ,第一个参数选取什么呢?
数据手册里说:
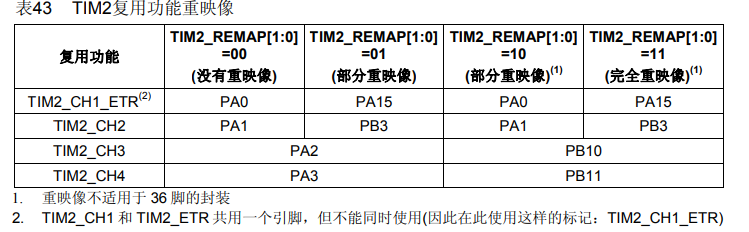

所以我们选择部分重映像1或完全重映像都行。
然后我们需要取消PA15原来的功能:

第一个:只取消NoJTRST调试的,也就是PB4.
第二个:取消PA15,PB3,PB4这三个JTAG调试端口。
第三个:解除JTAG和SWJ的端口,千万千万千万千万不能用,因为一旦烧录了,我们的板子就再也没法通过stlink下载了。需要用串口处理了。
代码上只是改了GPIO Pin,增加了AFIO重映射。
void PWM_Init(void){RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE);GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_15;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_InternalClockConfig(TIM2);TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;TIM_TimeBaseInitStructure.TIM_Period=100-1;TIM_TimeBaseInitStructure.TIM_Prescaler=720-1;TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//PA0对应定时器2,oc channel1.TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);//防止漏赋初值出错,而且再更改想改的赋值简单一些TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_OCNPolarity=TIM_OCNPolarity_Low;TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;TIM_OCInitStructure.TIM_Pulse=50;//ccrTIM_OC1Init(TIM2,&TIM_OCInitStructure);TIM_Cmd(TIM2,ENABLE);
}
代码:PWM舵机
5V接在stlink上,不要接在面包板上。
和LED呼吸灯相比,可以通过固定的占空比比值来确定旋转角度。

频率:1/20ms=50Hz, 即72M/(arr+1)*(psc+1)=50
ccr和arr+1成一定比例。比如period设置为200-1; psc设置为7200-1; 则ccr按比例可以设为5 10 15 20 25.
当然这样的角度不是很直观,我们可以写一个封装函数,传入角度,转动相应角度。
代码:直流电机
需要用到电机驱动模块。
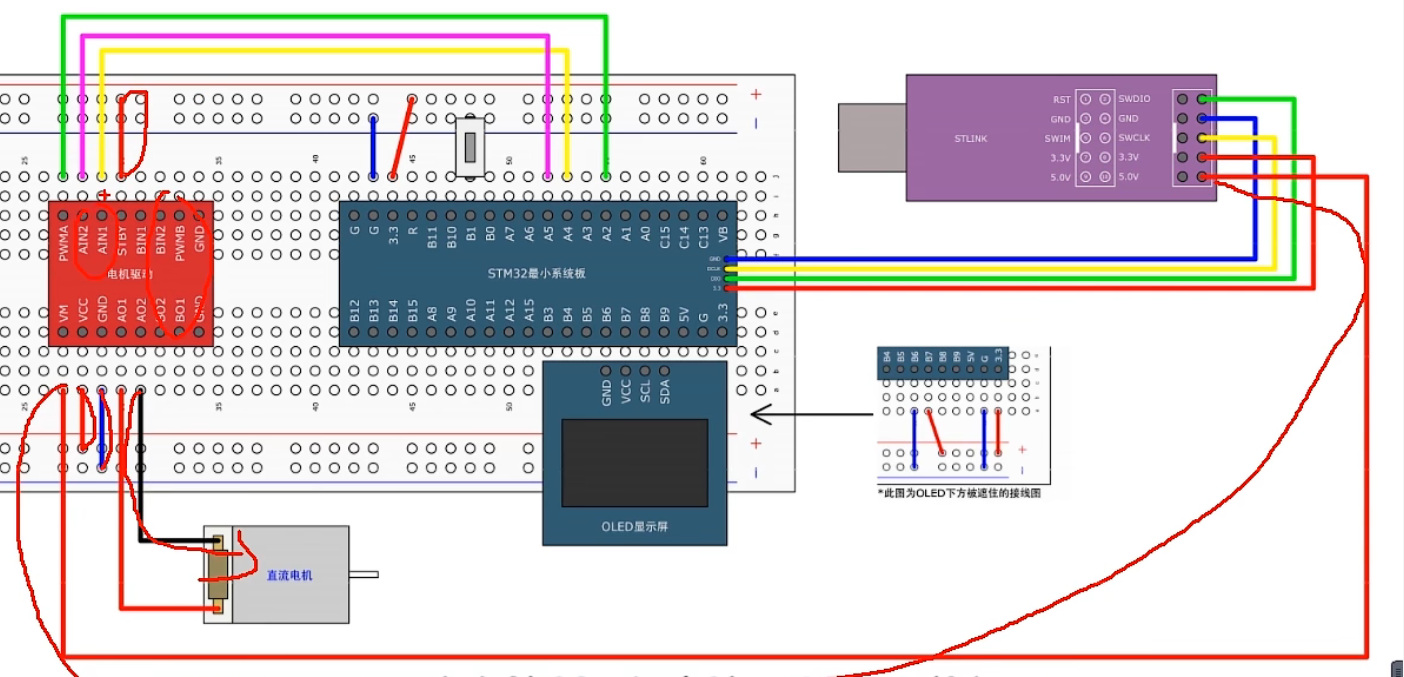
AN控制方向,随便接GPIO,PWMA接PWM输出。
和之前的输出比较没啥区别,还是我们给定一个ccr参数控制速度。AN的两个GPIO脚要初始化,初始化后一个SetBits一个ResetBits,来控制转向。
void Motor_Init(){//方向控制的引脚:AN设置RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4|GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);PWM_Init();
}void Motor_SetSpeed(int8_t speed){if(speed>0){//方向脚一高一低GPIO_SetBits(GPIOA, GPIO_Pin_4);GPIO_ResetBits(GPIOA, GPIO_Pin_5);TIM_SetCompare3(TIM2,speed);}else{GPIO_SetBits(GPIOA, GPIO_Pin_5);GPIO_ResetBits(GPIOA, GPIO_Pin_4);TIM_SetCompare3(TIM2,-speed);}
}
转动时有蜂鸣器般的噪声,可以通过调大频率解决,也就是prescaler和period参数调小点,频率就大了。
相关文章:
STM32 学习笔记_7 定时器中断:输出比较
输出比较 电机相关比较重要。 OC Output Compare(IC 是输入捕获,CC代指这两个单元),用于输出一定频率和占空比的PWM波形。 右下角四个就是CCR。只有通用计时器和高级计时器有,共用一个cnt计数器,高级计数…...

HTML购物车示例(勾选、删除、添加和结算功能)
以下是一个简单的HTML购物车示例,包含勾选、删除、添加和结算功能。结算功能使用PHP实现,可以获取选中商品的ID。 以下是一个简单的HTML购物车示例,包含勾选、删除、添加和结算功能。结算功能使用PHP实现,可以获取选中商品的ID以下…...

MySQL原理(十):主从架构
前言 上一篇介绍了 MySQL 的表分区和分库分表,这一篇将介绍主从架构相关的内容。 主从架构 常见的主从架构模式有四种: 一主多从架构:适用于读大于写的场景,采用多个从库来分担数据库系统的读压力。多主架构:适用于…...

一文了解Moonbeam智能合约
智能合约:区块链交易的基石 20世纪90年代,Nick Szabo首次提出智能合约的概念,这是一个建立在自动化、加密安全世界之上的数字化市场。在这种数字化市场中,交易和业务可以在无需信任的情况下进行,无需中间人。 以太坊…...
【加解密篇】利用HashCat破解RAR压缩包加密文件详细教程
【加解密篇】利用HashCat解密RAR压缩包加密文件 在取证知识里挖呀挖呀挖—【蘇小沐】 文章目录 【加解密篇】利用HashCat解密RAR压缩包加密文件1.实验环境2.RAR加密压缩包 (一)john软件1.使用CMD命令: run\rar2john.exe (二&…...
React面试题汇总1
1.React的严格模式如何使用,有什么用处? React中StrictMode严格模式_react.strictmode_前端精髓的博客-CSDN博客当我们使用 npx create-react-app my-app 创建一个项目的时候。项目中有一段如下所示的代码:ReactDOM.render( <React.Stric…...

Golang每日一练(leetDay0066) 有效电话号码、转置文件
目录 193. 有效电话号码 Valid Phone Numbers 🌟 194. 转置文件 Transpose File 🌟🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练 专栏 Java每日一练 专栏 193. 有效电话号…...

前端 之 FormData对象浅谈
一、简介 通常情况下,前端在使用post请求提交数据的时候,请求都是采用application/json 或 application/x-www-form-urlencoded编码类型,分别是借助JSON字符串来传递参数或者keyvalue格式字符串(多参数通过&进行连接&…...
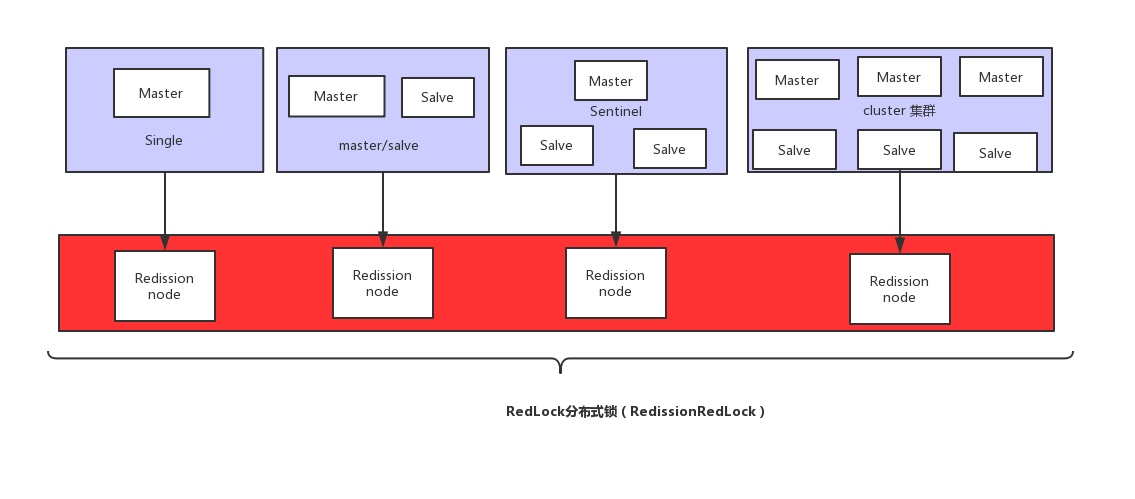
【分布式锁】Redisson分布式锁的使用(推荐使用)
文章目录 前言一、常见分布式锁方案对比二、分布式锁需满足四个条件三、什么是Redisson?官网和官方文档Redisson使用 四、Redisson 分布式重入锁用法Redisson 支持单点模式、主从模式、哨兵模式、集群模式自己先思考下,如果要手写一个分布式锁组件,怎么做ÿ…...
)
创建XML的三种方式(二)
文章目录 1 使用XmlDocument创建XML文档2 使用XmlTextWriter写XML文档3 使用LINQ to XML 的XDocument类4 小结 本文介绍了在winform中使用C#开发语言来创建XML文档的三种方式,并介绍了各自的优缺点。 方法1是使用 XmlDocument创建XML文档,方法2是使用 …...
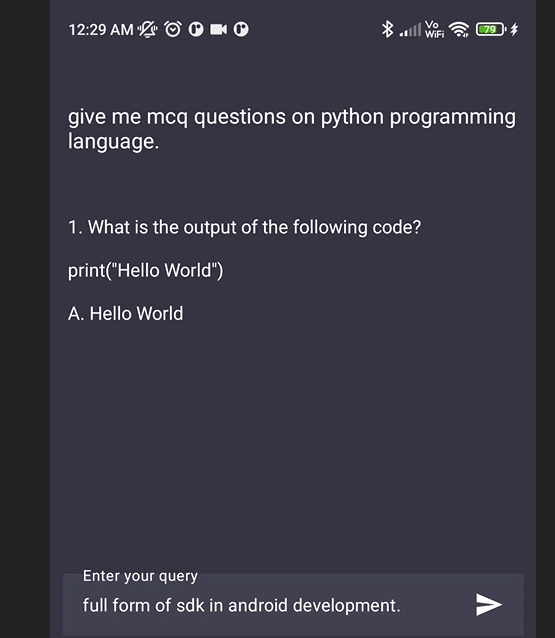
十分钟教你搭建类似ChatGPT的安卓应用程序
大家好,我是易安! Chat GPT 是当今著名的人工智能工具,就像聊天机器人一样。Chat GPT会回答发送给它的所有查询。今天,我将通过集成 OpenAI API (ChatGPT)构建一个简单的类似 ChatGPT 的 android 应用程序,我们可以在其…...
(二分查找))
问题 E: 起止位置(C++)(二分查找)
目录 1.题目描述 2.AC 1.题目描述 问题 E: 起止位置 时间限制: 1.000 Sec 内存限制: 128 MB提交 状态 题目描述 有n位同学按照年龄从小到大排好队。 王老师想要查询,年龄为x的同学,在队伍中首次出现的位置和最后一次出现的位置;如果队…...
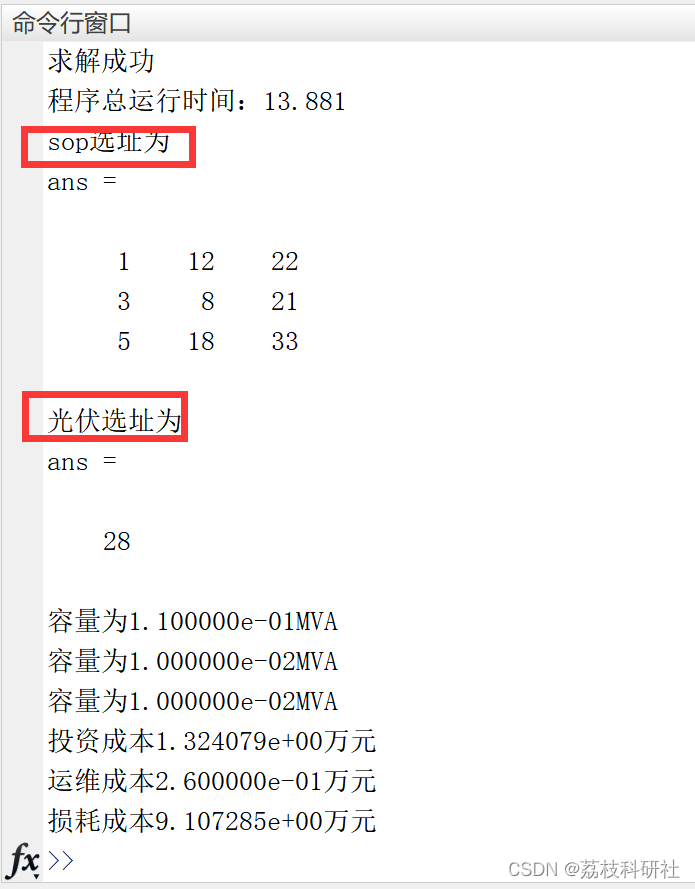
【sop】基于灵敏度分析的有源配电网智能软开关优化配置[升级1](Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
LeetCode周赛复盘(第345场周赛)
文章目录 1、找出转圈游戏输家1.1 题目链接1.2 题目描述1.3 解题代码1.4 解题思路 2、相邻值的按位异或2.1 题目链接2.2 题目描述2.3 解题代码2.4 解题思路 3、 矩阵中移动的最大次数3.1 题目链接3.2 题目描述3.3 解题代码3.4 解题思路 4、 统计完全连通分量的数量4.1 题目链接…...
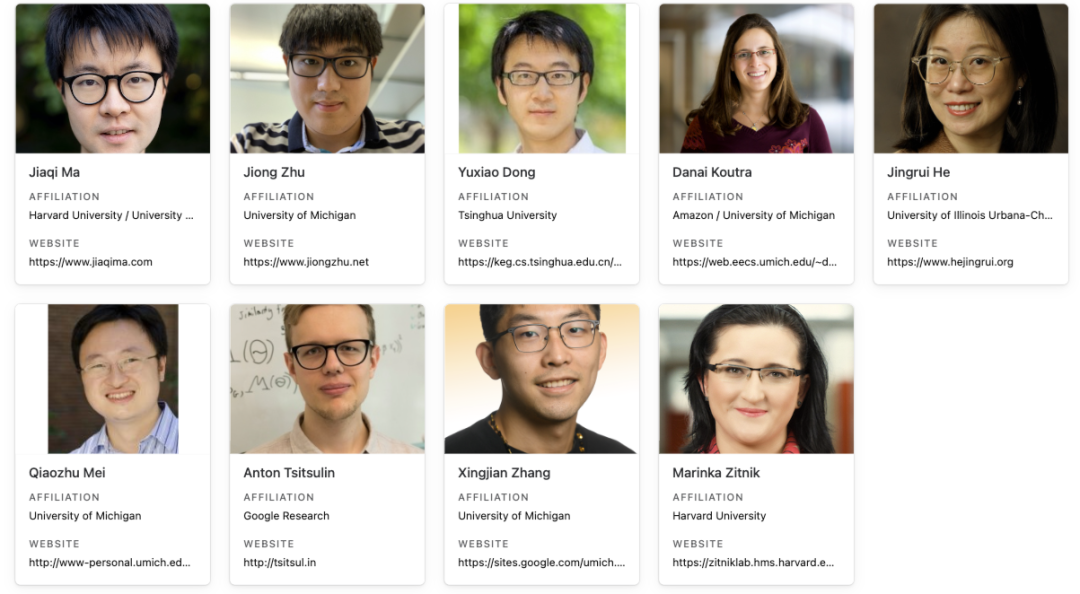
Call for Papers丨第三届GLB@KDD‘23 Workshop
鉴于介绍新数据集和Benchmark研究往往需要不同于常规论文的评审标准,计算机视觉和自然语言处理领域,以及最近的NeurIPS会议,都有专门致力于建立新Benchmark数据集和任务的Conference Track。然而在图机器学习领域,我们还没有类似的…...

【多线程】单例模式
目录 饿汉模式 懒汉模式-单线程版 懒汉模式-多线程版 懒汉模式-多线程版(改进) 单例是一种设计模式。 啥是设计模式 ? 设计模式好比象棋中的 " 棋谱 ". 红方当头炮 , 黑方马来跳 . 针对红方的一些走法 , 黑方应招的时候有一些固定的套路. 按照套路来走局势…...
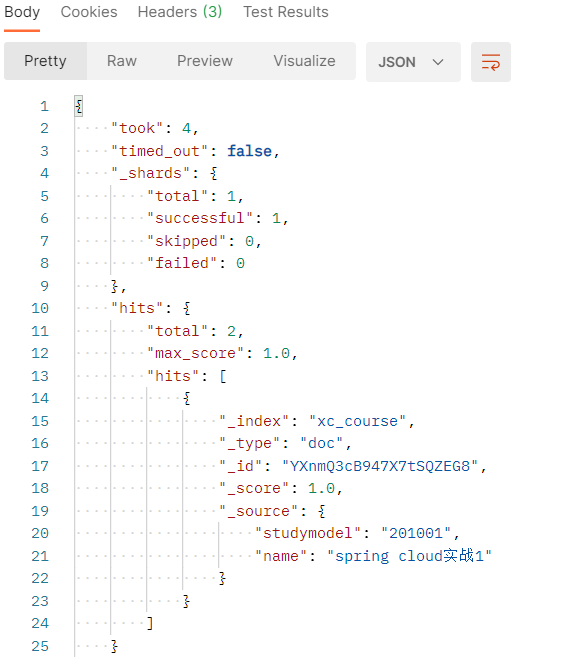
7搜索管理
7搜索管理 7.1 准备环境 7.1.1 创建映射 创建xc_course索引库。 创建如下映射 post:http://localhost:9200/xc_course/doc/_mapping 参考 “资料”–》搜索测试-初始化数据.txt { "properties": { "description": { "type": &…...

在Pytorch中使用Tensorboard
Tensorboard是一款深度学习可视化软件,目前主要使用了它的可视化模型, 可视化模型权重和可视化损失函数功能。 x.1 tensorboard初始化 tensorboard初始化需要导入SummaryWriter包并指定存储位置和开放端口号。 from torch.utils.tensorboard import SummaryWrite…...
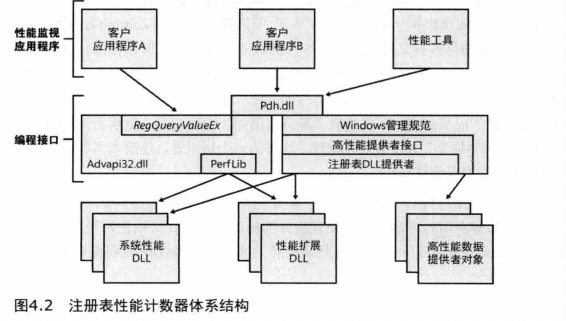
[笔记]深入解析Windows操作系统《四》管理机制
文章目录 前言4.1注册表查看和修改注册表注册表用法注册表数据类型注册表逻辑结构HKEY_CURRENT_USERHKEY_USERS 实验:观察轮廓加载和卸载HKEY_CLASSES_ROOTHKEY_LOCAL_MACHINE 实验:离线方式或远程编辑BCDHKEY_CURRENT_CONFIGHKEY_PERFORMANCE_DATA 前言 本章讲述了…...

【小沐学Python】Python实现在线英语翻译功能
文章目录 1、简介2、在线翻译接口2.1 Google Translate API2.2 Microsoft Translator API2.2.1 开发简介2.2.2 开发费用2.2.3 开发API 2.3 百度翻译开放平台 API2.3.1 开发简介2.3.2 开发费用2.3.3 开发API 2.4 Tencent AI 开放平台的翻译 API2.4.1 开发简介2.4.2 开发API 2.5 …...

五年级数学知识边界总结思考-下册
目录 一、背景二、过程1.观察物体小学五年级下册“观察物体”知识点详解:由来、作用与意义**一、知识点核心内容****二、知识点的由来:从生活实践到数学抽象****三、知识的作用:解决实际问题的工具****四、学习的意义:培养核心素养…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...

在鸿蒙HarmonyOS 5中使用DevEco Studio实现录音机应用
1. 项目配置与权限设置 1.1 配置module.json5 {"module": {"requestPermissions": [{"name": "ohos.permission.MICROPHONE","reason": "录音需要麦克风权限"},{"name": "ohos.permission.WRITE…...
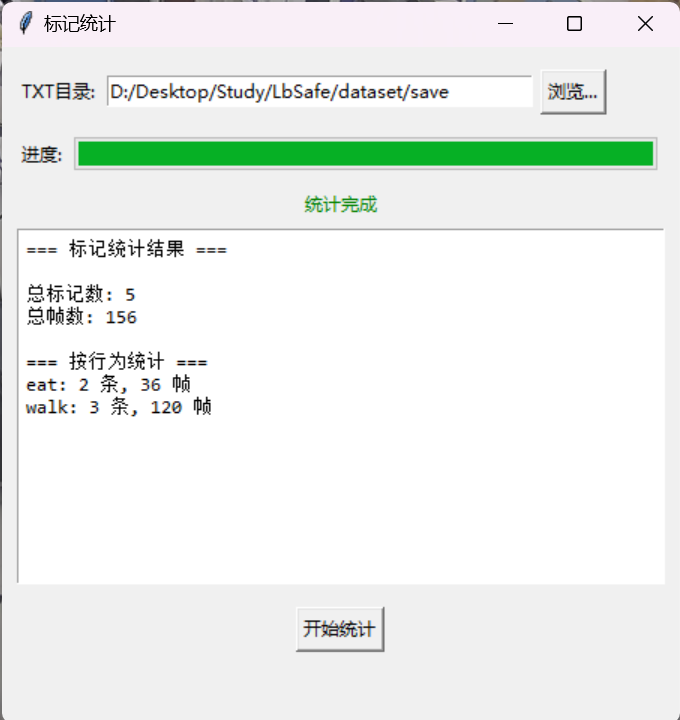
视频行为标注工具BehaviLabel(源码+使用介绍+Windows.Exe版本)
前言: 最近在做行为检测相关的模型,用的是时空图卷积网络(STGCN),但原有kinetic-400数据集数据质量较低,需要进行细粒度的标注,同时粗略搜了下已有开源工具基本都集中于图像分割这块,…...

在QWebEngineView上实现鼠标、触摸等事件捕获的解决方案
这个问题我看其他博主也写了,要么要会员、要么写的乱七八糟。这里我整理一下,把问题说清楚并且给出代码,拿去用就行,照着葫芦画瓢。 问题 在继承QWebEngineView后,重写mousePressEvent或event函数无法捕获鼠标按下事…...

高防服务器价格高原因分析
高防服务器的价格较高,主要是由于其特殊的防御机制、硬件配置、运营维护等多方面的综合成本。以下从技术、资源和服务三个维度详细解析高防服务器昂贵的原因: 一、硬件与技术投入 大带宽需求 DDoS攻击通过占用大量带宽资源瘫痪目标服务器,因此…...
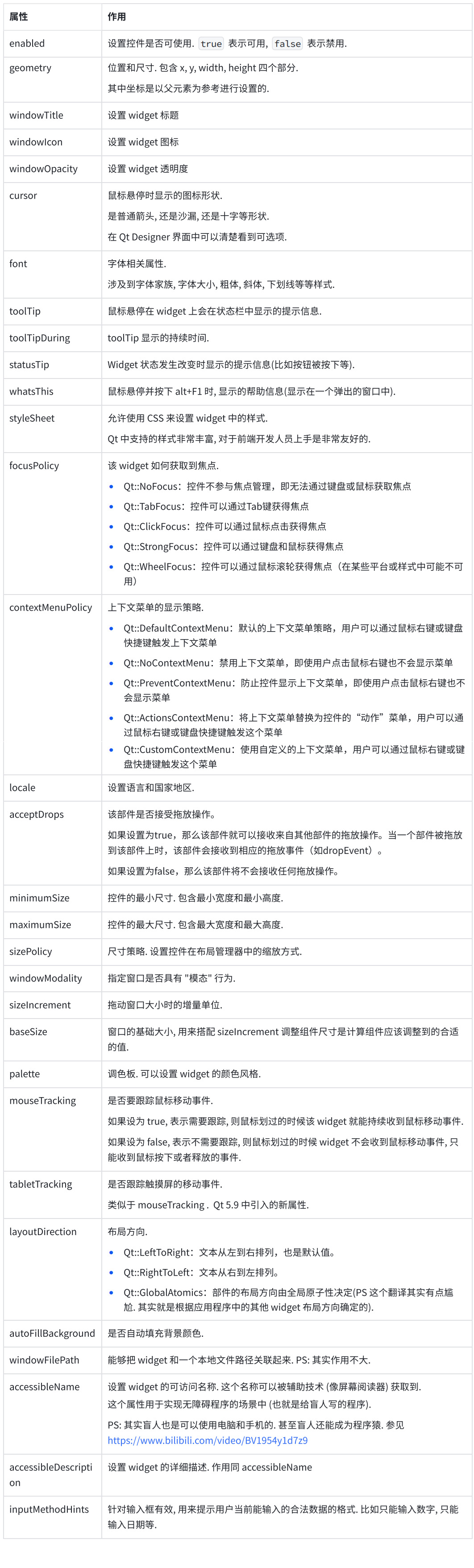
【Qt】控件 QWidget
控件 QWidget 一. 控件概述二. QWidget 的核心属性可用状态:enabled几何:geometrywindows frame 窗口框架的影响 窗口标题:windowTitle窗口图标:windowIconqrc 机制 窗口不透明度:windowOpacity光标:cursor…...
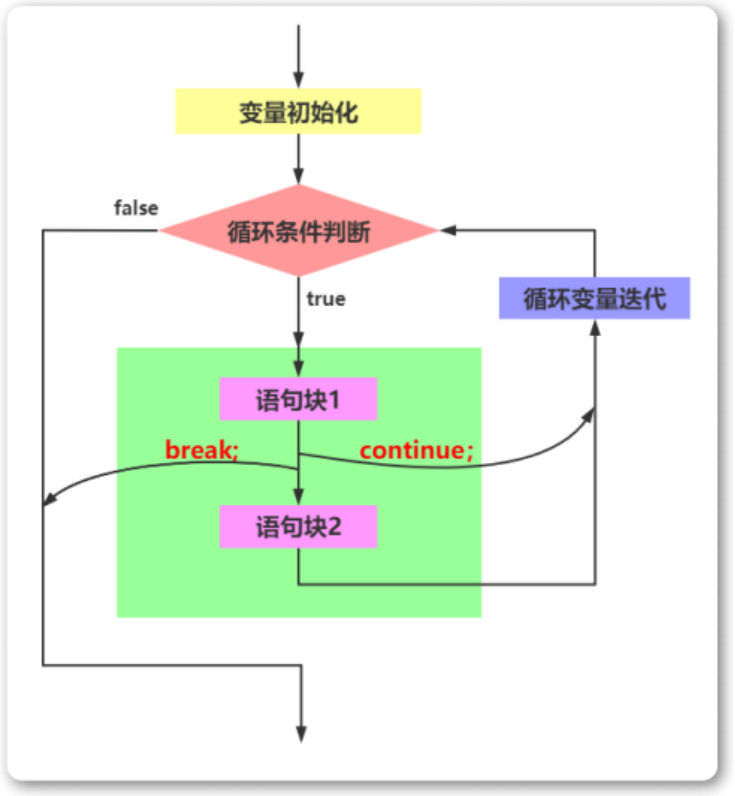
break 语句和 continue 语句
break语句和continue语句都具有跳转作用,可以让代码不按既有的顺序执行 break break语句用于跳出代码块或循环 1 2 3 4 5 6 for (var i 0; i < 5; i) { if (i 3){ break; } console.log(i); } continue continue语句用于立即终…...

c++算法学习3——深度优先搜索
一、深度优先搜索的核心概念 DFS算法是一种通过递归或栈实现的"一条路走到底"的搜索策略,其核心思想是: 深度优先:从起点出发,选择一个方向探索到底,直到无路可走 回溯机制:遇到死路时返回最近…...
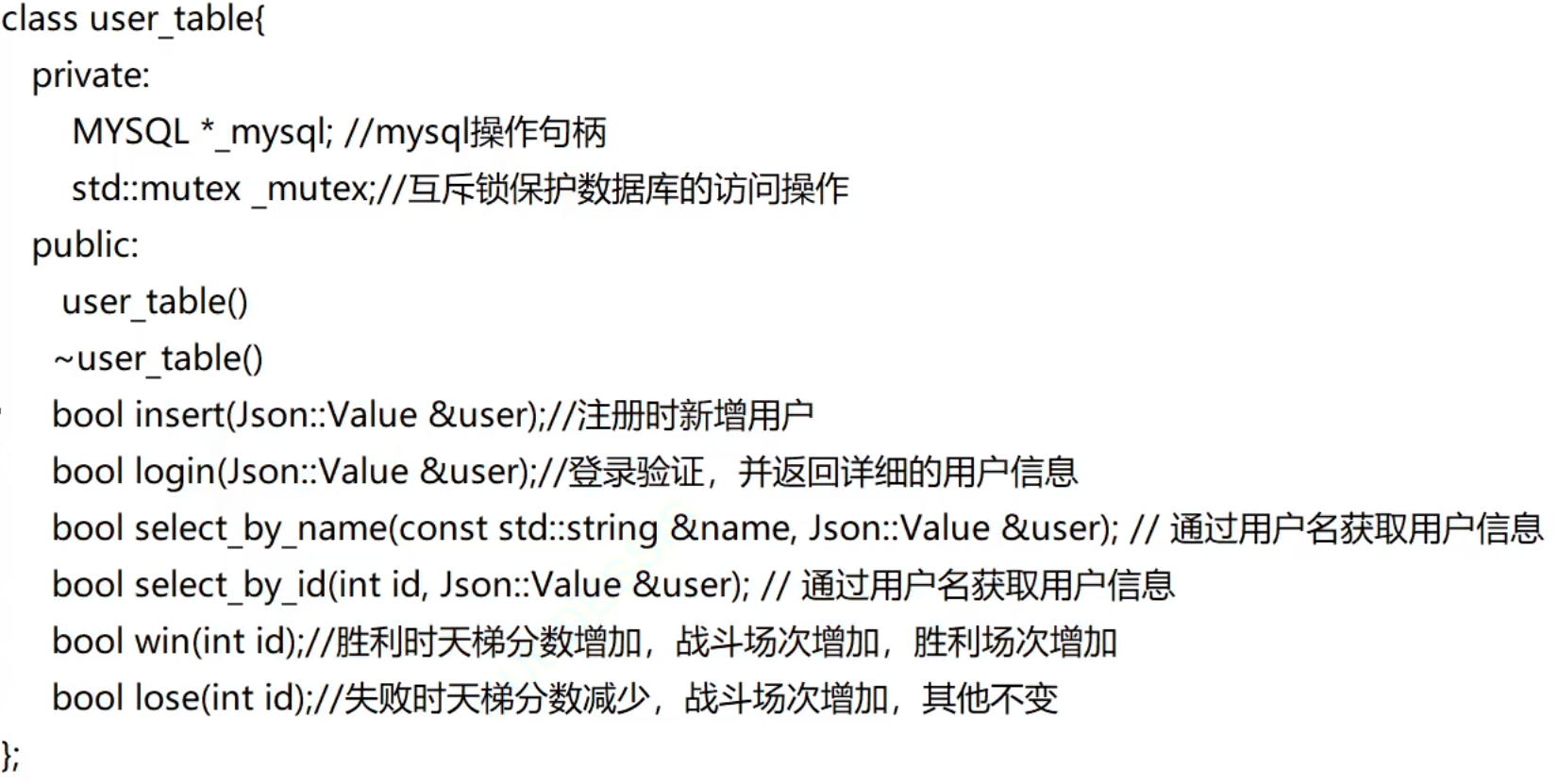
【五子棋在线对战】三.数据管理模块实现
数据管理模块实现 1.数据库表的设计2.数据管理模块的封装和实现2.1 user_table() && ~user_table()2.2 insert() 注册时新增用户2.3 login() 登录验证,并返回详细的用户信息2.4 通过用户名获取用户信息 && 通过用户id获取用户信息2.5 win() &&a…...