ORB-SLAM2学习笔记9之图像帧Frame
先占坑,明天再完善…
文章目录
- 0 引言
- 1 Frame类
- 1.1 成员函数
- 1.2 成员变量
- 2 Frame类的用途
0 引言
ORB-SLAM2学习笔记8详细了解了图像特征点提取和描述子的生成,本文在此基础上,继续学习ORB-SLAM2中的图像帧,也就是Frame类,该类中主要包含设置相机参数、利用双目计算深度及特征点反投影到3D地图点等函数。

1 Frame类
构造函数Frame类主要的代码如下:
双目相机Frame:
// 双目相机Frame构造函数
Frame::Frame(const cv::Mat &imLeft, const cv::Mat &imRight, const double &timeStamp, ORBextractor *extractorLeft, ORBextractor *extractorRight, ORBVocabulary *voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth): mpORBvocabulary(voc), mpORBextractorLeft(extractorLeft), mpORBextractorRight(extractorRight), mTimeStamp(timeStamp), mK(K.clone()), mDistCoef(distCoef.clone()), mbf(bf), mThDepth(thDepth), mpReferenceKF(static_cast<KeyFrame *>(NULL)) {// step0. 帧ID自增mnId = nNextId++;// step1. 计算金字塔参数mnScaleLevels = mpORBextractorLeft->GetLevels();mfScaleFactor = mpORBextractorLeft->GetScaleFactor();mfLogScaleFactor = log(mfScaleFactor);mvScaleFactors = mpORBextractorLeft->GetScaleFactors();mvInvScaleFactors = mpORBextractorLeft->GetInverseScaleFactors();mvLevelSigma2 = mpORBextractorLeft->GetScaleSigmaSquares();mvInvLevelSigma2 = mpORBextractorLeft->GetInverseScaleSigmaSquares();// step2. 提取双目图像特征点thread threadLeft(&Frame::ExtractORB, this, 0, imLeft);thread threadRight(&Frame::ExtractORB, this, 1, imRight);threadLeft.join();threadRight.join();N = mvKeys.size();if (mvKeys.empty())return;// step3. 畸变矫正,实际上UndistortKeyPoints()不对双目图像进行矫正UndistortKeyPoints();// step4. 双目图像特征点匹配ComputeStereoMatches();// step5. 第一次调用构造函数时计算static变量if (mbInitialComputations) {ComputeImageBounds(imLeft);mfGridElementWidthInv = static_cast<float>(FRAME_GRID_COLS) / static_cast<float>(mnMaxX - mnMinX);mfGridElementHeightInv = static_cast<float>(FRAME_GRID_ROWS) / static_cast<float>(mnMaxY - mnMinY);fx = K.at<float>(0, 0);fy = K.at<float>(1, 1);cx = K.at<float>(0, 2);cy = K.at<float>(1, 2);invfx = 1.0f / fx;invfy = 1.0f / fy;// 计算完成,标志复位mbInitialComputations = false;}mvpMapPoints = vector<MapPoint *>(N, static_cast<MapPoint *>(NULL)); // 初始化本帧的地图点mvbOutlier = vector<bool>(N, false); // 标记当前帧的地图点不是外点mb = mbf / fx; // 计算双目基线长度// step6. 将特征点分配到网格中AssignFeaturesToGrid();
}RGBD相机Frame:
// RGBD相机Frame构造函数
Frame::Frame(const cv::Mat &imGray, const cv::Mat &imDepth, const double &timeStamp, ORBextractor *extractor, ORBVocabulary *voc, cv::Mat &K, cv::Mat &distCoef, const float &bf, const float &thDepth): mpORBvocabulary(voc), mpORBextractorLeft(extractor), mpORBextractorRight(static_cast<ORBextractor *>(NULL)), mTimeStamp(timeStamp), mK(K.clone()), mDistCoef(distCoef.clone()), mbf(bf), mThDepth(thDepth) {// step0. 帧ID自增mnId = nNextId++;// step1. 计算金字塔参数mnScaleLevels = mpORBextractorLeft->GetLevels();mfScaleFactor = mpORBextractorLeft->GetScaleFactor();mfLogScaleFactor = log(mfScaleFactor);mvScaleFactors = mpORBextractorLeft->GetScaleFactors();mvInvScaleFactors = mpORBextractorLeft->GetInverseScaleFactors();mvLevelSigma2 = mpORBextractorLeft->GetScaleSigmaSquares();mvInvLevelSigma2 = mpORBextractorLeft->GetInverseScaleSigmaSquares();// step2. 提取左目图像特征点ExtractORB(0, imGray);N = mvKeys.size();if (mvKeys.empty())return;// step3. 畸变矫正UndistortKeyPoints();// step4. 根据深度信息构造虚拟右目图像ComputeStereoFromRGBD(imDepth);mvpMapPoints = vector<MapPoint *>(N, static_cast<MapPoint *>(NULL));mvbOutlier = vector<bool>(N, false);// step5. 第一次调用构造函数时计算static变量if (mbInitialComputations) {ComputeImageBounds(imLeft);mfGridElementWidthInv = static_cast<float>(FRAME_GRID_COLS) / static_cast<float>(mnMaxX - mnMinX);mfGridElementHeightInv = static_cast<float>(FRAME_GRID_ROWS) / static_cast<float>(mnMaxY - mnMinY);fx = K.at<float>(0, 0);fy = K.at<float>(1, 1);cx = K.at<float>(0, 2);cy = K.at<float>(1, 2);invfx = 1.0f / fx;invfy = 1.0f / fy;// 计算完成,标志复位mbInitialComputations = false;}mvpMapPoints = vector<MapPoint *>(N, static_cast<MapPoint *>(NULL)); // 初始化本帧的地图点mvbOutlier = vector<bool>(N, false); // 标记当前帧的地图点不是外点mb = mbf / fx; // 计算双目基线长度// step6. 将特征点分配到网格中AssignFeaturesToGrid();
}1.1 成员函数
| 成员函数 | 类型 | 定义 |
|---|---|---|
ORBextractor* mpORBextractorLeft,ORBextractor* mpORBextractorRight | public | 左右目图像的特征点提取器 |
void ExtractORB(int flag, const cv::Mat &im) | public | 进行ORB特征提取 |
cv::Mat mDescriptors,cv::Mat mDescriptorsRight | public | 左右目图像特征点描述子 |
std::vector<cv::KeyPoint> mvKeys,std::vector<cv::KeyPoint> mvKeysRight | public | 畸变矫正前的左/右目特征点 |
std::vector<cv::KeyPoint> mvKeysUn | public | 畸变矫正后的左目特征点 |
std::vector<float> mvuRight | public | 左目特征点在右目中匹配特征点的横坐标 |
| (左右目匹配特征点的纵坐标相同) | ||
std::vector<float> mvDepth | public | 特征点深度 |
float mThDepth | public | 判断单目特征点和双目特征点的阈值;深度低于该值得特征点被认为是双目特征点;深度低于该值得特征点被认为是单目特征点 |
1.2 成员变量
| 成员变量 | 类型 | 定义 |
|---|---|---|
mbInitialComputations | public | static变量,是否需要为Frame类的相机参数赋值,初始化为false,第一次为相机参数赋值后变为false |
float fx, float fy, float cx, float cy, float invfx, float invfy | public | static变量,相机内参 |
cv::Mat mK | public | 相机内参矩阵 |
float mb | public | 相机基线baseline,相机双目间的距离 |
float mbf | public | 相机基线baseline与焦距的乘积 |
Frame类大多与相机相关的参数,而且整个系统内的所有Frame对象共享同一份相机参数;
2 Frame类的用途
除了少数被选为KeyFrame的帧以外,大部分Frame对象的作用仅在于Tracking线程内追踪当前帧位姿,不会对LocalMapping线程和LoopClosing线程产生任何影响,在mLastFrame和mCurrentFrame更新之后就被系统销毁了。
Reference:
- https://github.com/raulmur/ORB_SLAM2
- https://github.com/electech6/ORB_SLAM2_detailed_comments/tree/master
⭐️👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍👍🌔
相关文章:
ORB-SLAM2学习笔记9之图像帧Frame
先占坑,明天再完善… 文章目录 0 引言1 Frame类1.1 成员函数1.2 成员变量 2 Frame类的用途 0 引言 ORB-SLAM2学习笔记8详细了解了图像特征点提取和描述子的生成,本文在此基础上,继续学习ORB-SLAM2中的图像帧,也就是Frame类&#…...
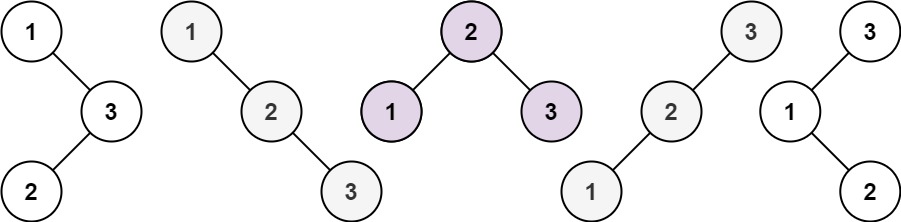
面试热题(不同的二分搜索树)
给你一个整数 n ,求恰由 n 个节点组成且节点值从 1 到 n 互不相同的 二叉搜索树 有多少种?返回满足题意的二叉搜索树的种数。 经典的面试题,这部分涉及了组合数学中的卡特兰数,如果对其不清楚的同学可以去看我以前的博客卡特兰数 …...

MybatisPlus整合p6spy组件SQL分析
目录 p6spy java为什么需要 如何使用 其他配置 p6spy p6spy是一个开源项目,通常使用它来跟踪数据库操作,查看程序运行过程中执行的sql语句。 p6spy将应用的数据源给劫持了,应用操作数据库其实在调用p6spy的数据源,p6spy劫持到…...
项目实战 — 博客系统③ {功能实现}
目录 一、编写注册功能 🍅 1、使用ajax构造请求(前端) 🍅 2、统一处理 🎄 统一对象处理 🎄 保底统一返回处理 🎄 统一异常处理 🍅 3、处理请求 二、编写登录功能 🍅 …...
卷积神经网络全解:(AlexNet/VGG/ GoogLeNet/LeNet/ResNet/卷积/激活/池化/全连接)、现代卷积神经网络、经典卷积神经网络
CNN,卷积神经网络,Convolution Neural Network 卷积计算公式:N (W-F2p)/s1 这个公式每次都得看看,不能忘 1 经典网络 按照时间顺序 1.1 LeNet LeNet是 Yann LeCun在1998年提出,用于解决手…...
简述)
WDM 模型(Windows Driver Model)简述
WDM 模型(Windows Driver Model) 是微软公司为 Windows98 和 Windows2000 的驱动程序设计的一种架构,在 WDM 驱动程序模型中,每个硬件设备 至少有两个驱动程序。其中一个为功能驱动程序,它了解硬件工作的所有细节,负 责初始化 …...

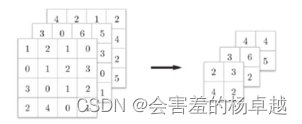
【算法刷题之数组篇(1)】
目录 1.leetcode-59. 螺旋矩阵 II(题2.题3相当于二分变形)2.leetcode-33. 搜索旋转排序数组3.leetcode-81. 搜索旋转排序数组 II(与题目2对比理解)(题4和题5都是排序双指针)4.leetcode-15. 三数之和5.leetcode-18. 四数之和6.leet…...
【数据挖掘】使用 Python 分析公共数据【01/10】
一、说明 本文讨论了如何使用 Python 使用 Pandas 库分析官方 COVID-19 病例数据。您将看到如何从实际数据集中收集见解,发现乍一看可能不那么明显的信息。特别是,本文中提供的示例说明了如何获取有关疾病在不同国家/地区传播速度的信息。 二、准备您的…...

html怎么插入视频?视频如何插入页面
html怎么插入视频?视频如何插入页面 HTML 的功能强大,基本所有的静态效果都可以在此轻松呈现,各种视频网站内有大量的视频内容,本篇文章教你如何在 html 中插入视频 代码如下: <!DOCTYPE html> <html> …...
游戏服务端性能测试
导语:近期经历了一系列的性能测试,涵盖了Web服务器和游戏服务器的领域。在这篇文章中,我将会对游戏服务端所做的测试进行详细整理和记录。需要注意的是,本文着重于记录,而并非深入的编程讨论。在这里,我将与…...
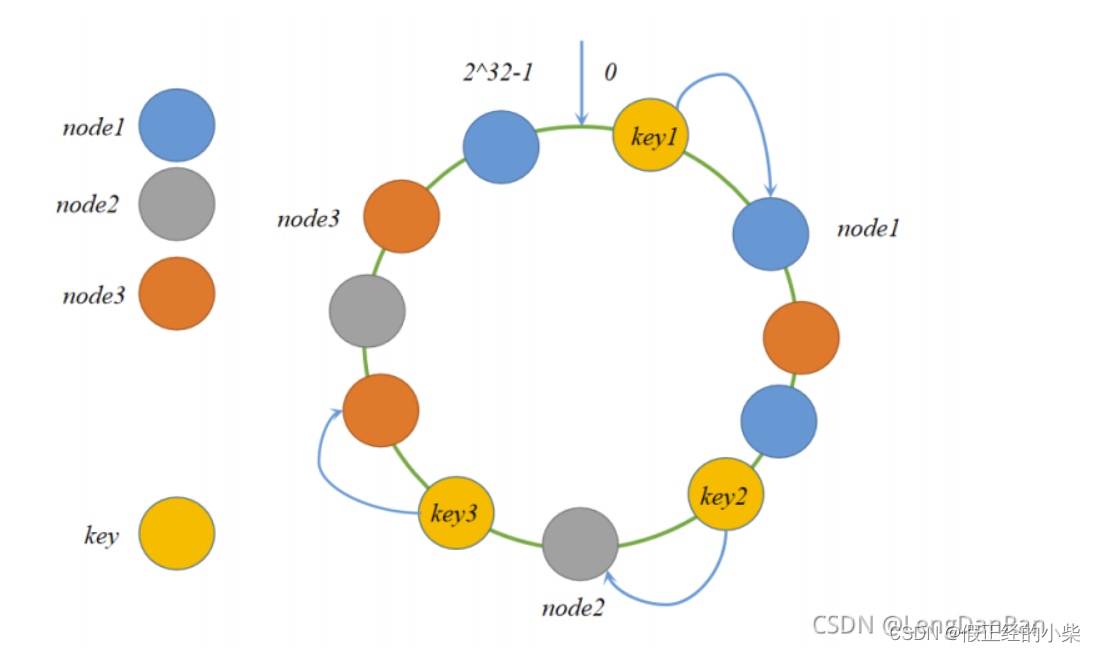
【使用Zookeeper当作注册中心】自己定制负载均衡常见策略
自己定制负载均衡常见策略 一、前言随机(Random)策略的实现轮询(Round Robin)策略的实现哈希(Hash)策略 一、前言 大伙肯定知道,在分布式开发中,目前使用较多的注册中心有以下几个&…...
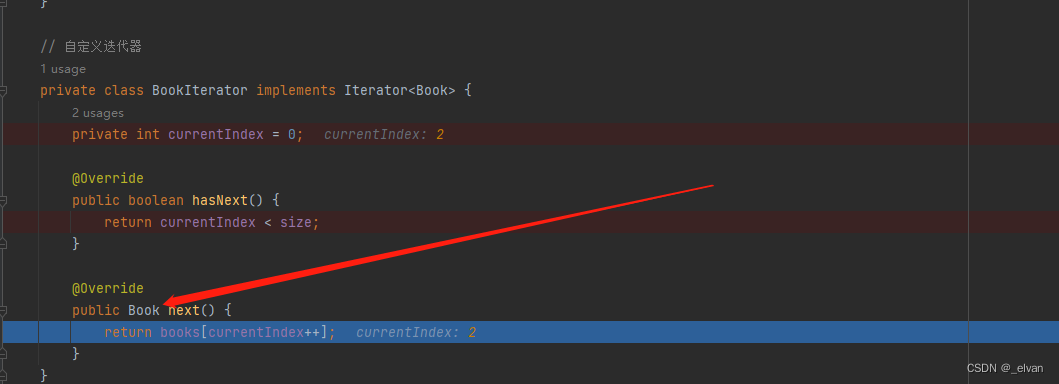
设计模式十七:迭代器模式(Iterator Pattern)
迭代器模式(Iterator Pattern)是一种行为型设计模式,它提供了一种访问聚合对象(例如列表、集合、数组等)中各个元素的方法,而无需暴露其内部表示。迭代器模式将遍历元素和访问元素的责任分离开来࿰…...

Python制作爱心并打包成手机端可执行文件
前言 本文是想要将python代码打包成在手机上能执行的文件 尝试了几个库, 有这也那样的限制,最终还是选了BeeWare 环境:python3.7.x 开始 找到打包有相关工具os-android-apk-builder,buildozer,cx_Freezeÿ…...
以及多容器通信和统一配置)
使用docker-compose.yml快速搭建开发、部署环境(nginx、tomcat、mysql、jar包、各种程序)以及多容器通信和统一配置
目录 docker-compose语法(更多说明可查看下面代码)imagehostnamecontainer_namevolumesnetworks yml文件的使用启动停止 开发环境(这里以python为例)部署环境nginxmysqltomcatjar包打包后的可执行程序 常见问题与解决方案多个容器…...

管理类联考——逻辑——真题篇——按知识分类——汇总篇——二、论证逻辑——支持加强——第三节——分类3——类比题干支持
文章目录 第三节 支持加强-分类3-类比题干支持真题(2017-28)-支持加强-正面支持-表达“确实如此”真题(2017-36)-支持加强-正面支持-表达“确实如此”真题(2017-39)-支持加强-正面支持-方法有效或方法可行,但多半不选择方法无恶果真题(2017-50)-支持加强真题(2018-2…...

搜索旋转排序数组
整数数组 nums 按升序排列,数组中的值 互不相同 。 在传递给函数之前,nums 在预先未知的某个下标 k(0 < k < nums.length)上进行了 旋转,使数组变为 [nums[k], nums[k1], …, nums[n-1], nums[0], nums[1], …, …...

Steam搬砖项目:最长久稳定的副业!
项目应该大家都有听说话,但是细节问题,如何操作可能有些不是很清楚,今天在这里简单分享一下。 这个Steam搬砖项目主要赚钱汇率差和价值差,是一个细分领取的小项目。 不用引流,时间也是比较自由的,你可以兼…...
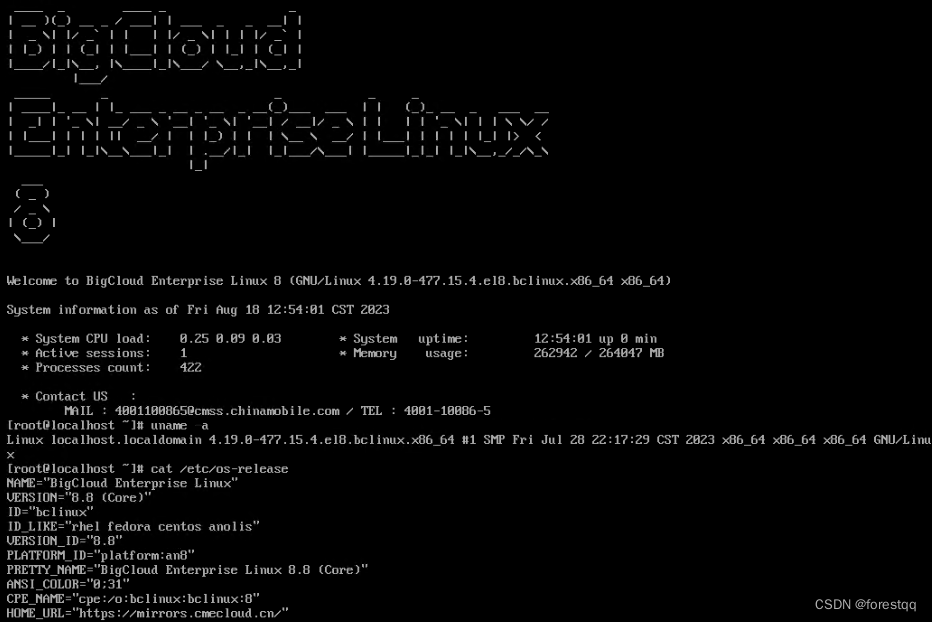
最小化安装移动云大云操作系统--BCLinux-R8-U8-Server-x86_64-230802版
CentOS 结束技术支持,转为RHEL的前置stream版本后,国内开源Linux服务器OS生态转向了开源龙蜥和开源欧拉两大开源社区,对应衍生出了一系列商用Linux服务器系统。BC-Linux V8.8是中国移动基于龙蜥社区Anolis OS 8.8版本深度定制的企业级X86服务…...

神经网络基础-神经网络补充概念-05-导数
概念 导数是微积分中的一个概念,用于描述函数在某一点的变化率。在数学中,函数的导数表示函数值随着自变量的微小变化而产生的变化量,即斜率或变化率。 假设有一个函数 f(x),其中 x 是自变量,y f(x) 是因变量。函数…...

kubernetes — 安装Ingress
1、 Ingress 1、安装-Nginx-Ingress kubectl apply -f https://raw.githubusercontent.com/kubernetes/ingress-nginx/controller-v1.8.1/deploy/static/provider/cloud/deploy.yaml 2、设为默认的Ingress [rootk8s01 ~]# vim default_ingress.yaml apiVersion: networking.…...

多场景 OkHttpClient 管理器 - Android 网络通信解决方案
下面是一个完整的 Android 实现,展示如何创建和管理多个 OkHttpClient 实例,分别用于长连接、普通 HTTP 请求和文件下载场景。 <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...

大语言模型如何处理长文本?常用文本分割技术详解
为什么需要文本分割? 引言:为什么需要文本分割?一、基础文本分割方法1. 按段落分割(Paragraph Splitting)2. 按句子分割(Sentence Splitting)二、高级文本分割策略3. 重叠分割(Sliding Window)4. 递归分割(Recursive Splitting)三、生产级工具推荐5. 使用LangChain的…...
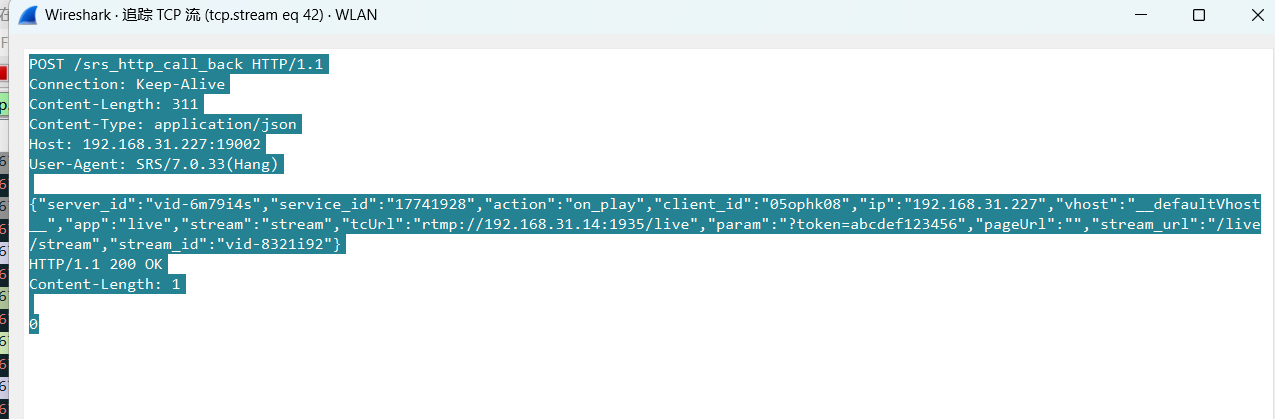
srs linux
下载编译运行 git clone https:///ossrs/srs.git ./configure --h265on make 编译完成后即可启动SRS # 启动 ./objs/srs -c conf/srs.conf # 查看日志 tail -n 30 -f ./objs/srs.log 开放端口 默认RTMP接收推流端口是1935,SRS管理页面端口是8080,可…...

第25节 Node.js 断言测试
Node.js的assert模块主要用于编写程序的单元测试时使用,通过断言可以提早发现和排查出错误。 稳定性: 5 - 锁定 这个模块可用于应用的单元测试,通过 require(assert) 可以使用这个模块。 assert.fail(actual, expected, message, operator) 使用参数…...
Springboot社区养老保险系统小程序
一、前言 随着我国经济迅速发展,人们对手机的需求越来越大,各种手机软件也都在被广泛应用,但是对于手机进行数据信息管理,对于手机的各种软件也是备受用户的喜爱,社区养老保险系统小程序被用户普遍使用,为方…...
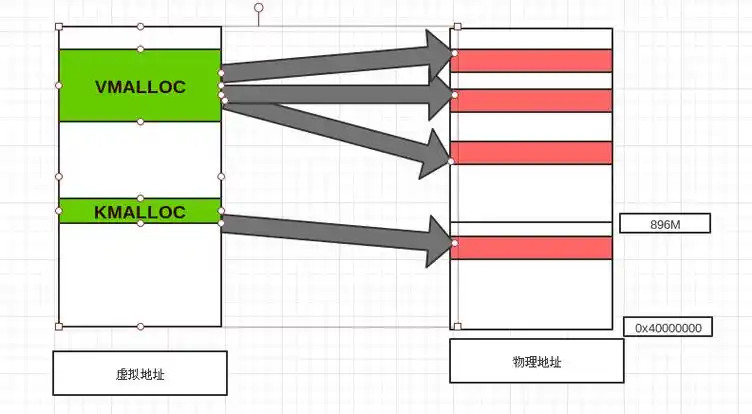
Linux 内存管理实战精讲:核心原理与面试常考点全解析
Linux 内存管理实战精讲:核心原理与面试常考点全解析 Linux 内核内存管理是系统设计中最复杂但也最核心的模块之一。它不仅支撑着虚拟内存机制、物理内存分配、进程隔离与资源复用,还直接决定系统运行的性能与稳定性。无论你是嵌入式开发者、内核调试工…...
混合(Blending))
C++.OpenGL (20/64)混合(Blending)
混合(Blending) 透明效果核心原理 #mermaid-svg-SWG0UzVfJms7Sm3e {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-SWG0UzVfJms7Sm3e .error-icon{fill:#552222;}#mermaid-svg-SWG0UzVfJms7Sm3e .error-text{fill…...
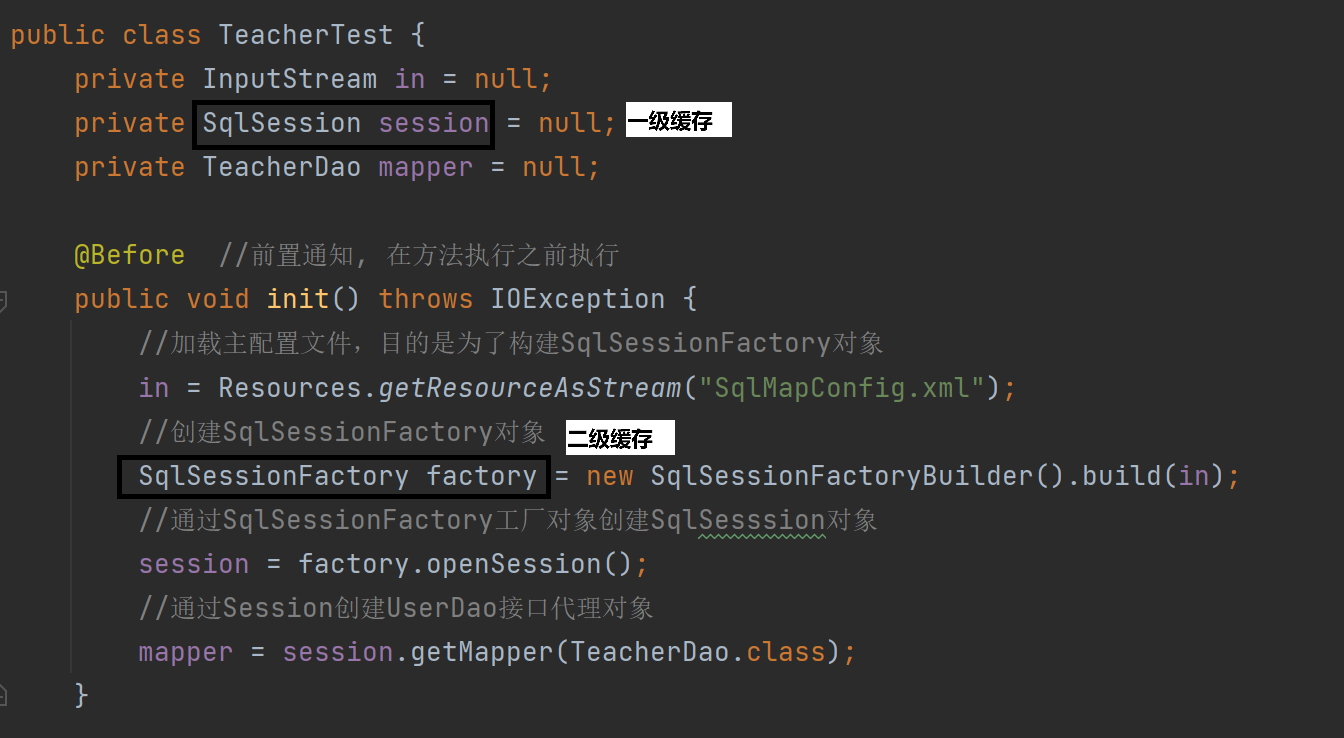
MyBatis中关于缓存的理解
MyBatis缓存 MyBatis系统当中默认定义两级缓存:一级缓存、二级缓存 默认情况下,只有一级缓存开启(sqlSession级别的缓存)二级缓存需要手动开启配置,需要局域namespace级别的缓存 一级缓存(本地缓存&#…...

API网关Kong的鉴权与限流:高并发场景下的核心实践
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 引言 在微服务架构中,API网关承担着流量调度、安全防护和协议转换的核心职责。作为云原生时代的代表性网关,Kong凭借其插件化架构…...