【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
文章目录
- 前言
- LANE_CHANGE_DECIDER功能简介
- LANE_CHANGE_DECIDER相关配置
- LANE_CHANGE_DECIDER总体流程
- LANE_CHANGE_DECIDER相关子函数
- PrioritizeChangeLane
- UpdateStatus
- IsClearToChangeLane
- HysteresisFilter
- 参考
前言
在Apollo星火计划学习笔记——Apollo路径规划算法原理与实践与【Apollo学习笔记】——Planning模块讲到……Stage::Process的PlanOnReferenceLine函数会依次调用task_list中的TASK,本文将会继续以LaneFollow为例依次介绍其中的TASK部分究竟做了哪些工作。由于个人能力所限,文章可能有纰漏的地方,还请批评斧正。
在modules/planning/conf/scenario/lane_follow_config.pb.txt配置文件中,我们可以看到LaneFollow所需要执行的所有task。
stage_config: {stage_type: LANE_FOLLOW_DEFAULT_STAGEenabled: truetask_type: LANE_CHANGE_DECIDERtask_type: PATH_REUSE_DECIDERtask_type: PATH_LANE_BORROW_DECIDERtask_type: PATH_BOUNDS_DECIDERtask_type: PIECEWISE_JERK_PATH_OPTIMIZERtask_type: PATH_ASSESSMENT_DECIDERtask_type: PATH_DECIDERtask_type: RULE_BASED_STOP_DECIDERtask_type: SPEED_BOUNDS_PRIORI_DECIDERtask_type: SPEED_HEURISTIC_OPTIMIZERtask_type: SPEED_DECIDERtask_type: SPEED_BOUNDS_FINAL_DECIDERtask_type: PIECEWISE_JERK_SPEED_OPTIMIZER# task_type: PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZERtask_type: RSS_DECIDER
本文将从第一个task——LANE_CHANGE_DECIDER开始介绍。
LANE_CHANGE_DECIDER功能简介

LANE_CHANGE_DECIDER主要功能是:产生是否换道的决策,更新换道状态。
其主要逻辑是:首先判断是否产生多条参考线,若只有一条参考线,则保持直行。若有多条参考线,则根据一些条件(主车的前方和后方一定距离内是否有障碍物,旁边车道在一定距离内是否有障碍物)进行判断是否换道,当所有条件都满足时,则进行换道决策。
LANE_CHANGE_DECIDER相关配置
LANE_CHANGE_DECIDER的相关配置集中在以下两个文件:modules/planning/conf/planning_config.pb.txt和modules/planning/conf/scenario/lane_follow_config.pb.txt
// modules/planning/conf/planning_config.pb.txt
default_task_config: {task_type: LANE_CHANGE_DECIDERlane_change_decider_config {enable_lane_change_urgency_check: falseenable_prioritize_change_lane: falseenable_remove_change_lane: falsereckless_change_lane: falsechange_lane_success_freeze_time: 1.5change_lane_fail_freeze_time: 1.0}
}
// modules/planning/conf/scenario/lane_follow_config.pb.txttask_config: {task_type: LANE_CHANGE_DECIDERlane_change_decider_config {enable_lane_change_urgency_check: true}}
LANE_CHANGE_DECIDER总体流程
总体流程图如下所示:
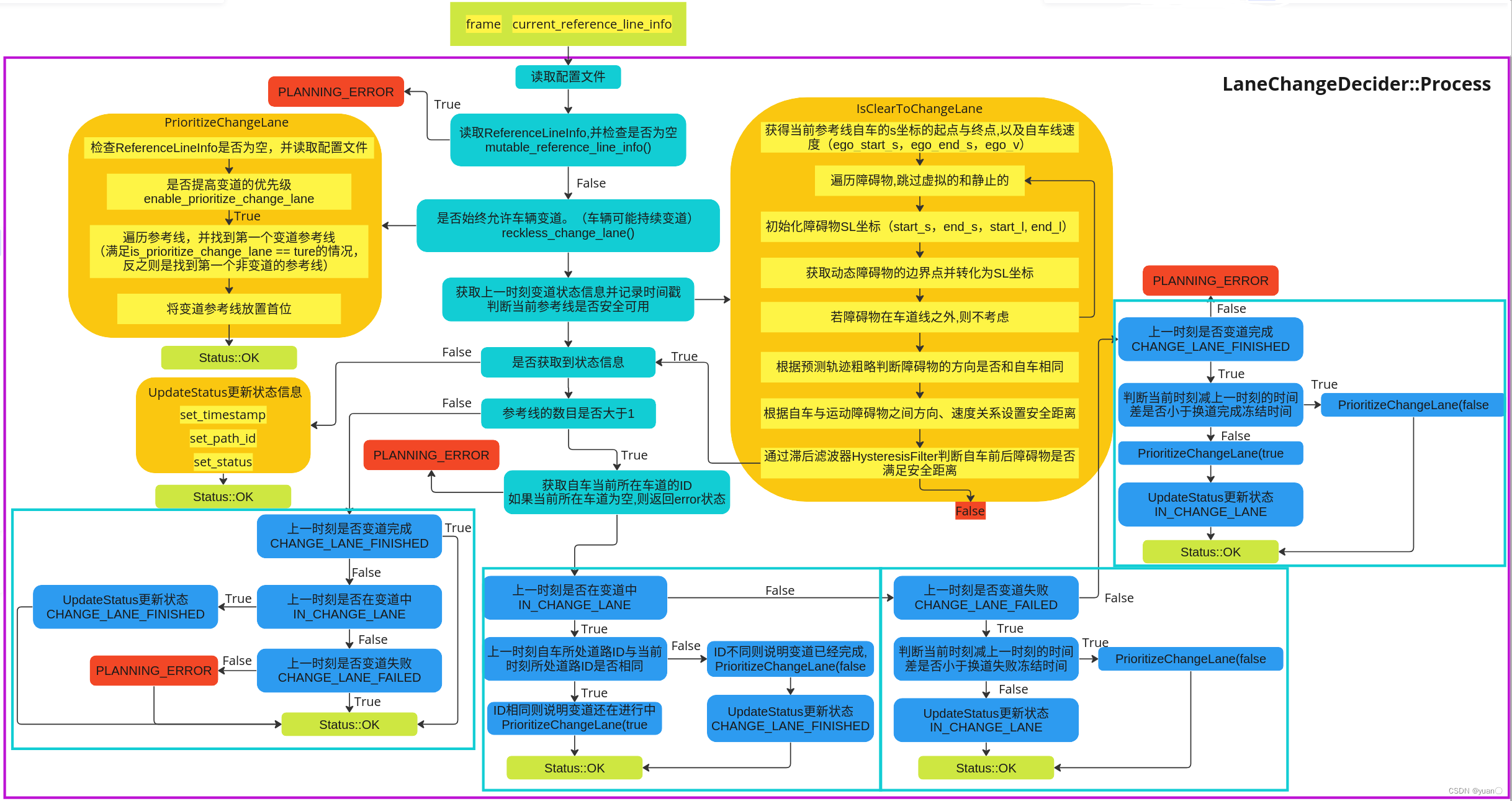
接着来看一看LANE_CHANGE_DECIDER的整体代码,文件路径:modules/planning/tasks/deciders/lane_change_decider/lane_change_decider.cc
LANE_CHANGE_DECIDER实现逻辑在Process函数中:
// added a dummy parameter to enable this task in ExecuteTaskOnReferenceLine
Status LaneChangeDecider::Process(Frame* frame, ReferenceLineInfo* const current_reference_line_info) {// Sanity checks.CHECK_NOTNULL(frame);// 读取配置文件const auto& lane_change_decider_config = config_.lane_change_decider_config();// 读取ReferenceLineInfo,并检查是否为空std::list<ReferenceLineInfo>* reference_line_info =frame->mutable_reference_line_info();if (reference_line_info->empty()) {const std::string msg = "Reference lines empty.";AERROR << msg;return Status(ErrorCode::PLANNING_ERROR, msg);}// 始终允许车辆变道。车辆可能持续变道 config_path:modules/planning/proto/task_config.protoif (lane_change_decider_config.reckless_change_lane()) {PrioritizeChangeLane(true, reference_line_info);return Status::OK();}// 获取上一时刻变道状态信息并记录时间戳auto* prev_status = injector_->planning_context()->mutable_planning_status()->mutable_change_lane();double now = Clock::NowInSeconds();// 判断当前参考线是否安全可用prev_status->set_is_clear_to_change_lane(false);if (current_reference_line_info->IsChangeLanePath()) {prev_status->set_is_clear_to_change_lane(IsClearToChangeLane(current_reference_line_info));}// 是否获取到状态信息if (!prev_status->has_status()) {UpdateStatus(now, ChangeLaneStatus::CHANGE_LANE_FINISHED,GetCurrentPathId(*reference_line_info));prev_status->set_last_succeed_timestamp(now);return Status::OK();}// 参考线的数目是否大于1// 根据reference line的数量判断是否处于变道场景中,size() > 1则处于变道过程中,需要判断变道的状态bool has_change_lane = reference_line_info->size() > 1;ADEBUG << "has_change_lane: " << has_change_lane;// 只有一条reference line,没有进行变道if (!has_change_lane) {// 根据当前唯一的reference line,获得当前道路lane的IDconst auto& path_id = reference_line_info->front().Lanes().Id();// 上一时刻是否变道完成if (prev_status->status() == ChangeLaneStatus::CHANGE_LANE_FINISHED) {// 上一时刻是否在变道中。若有,这一时刻只有一条reference line,说明变道成功} else if (prev_status->status() == ChangeLaneStatus::IN_CHANGE_LANE) {// 更新当前时刻,变道完成状态,以及当前道路的IDUpdateStatus(now, ChangeLaneStatus::CHANGE_LANE_FINISHED, path_id);// 上一时刻是否变道失败} else if (prev_status->status() == ChangeLaneStatus::CHANGE_LANE_FAILED) {} else {const std::string msg =absl::StrCat("Unknown state: ", prev_status->ShortDebugString());AERROR << msg;return Status(ErrorCode::PLANNING_ERROR, msg);}// 返回LaneChangeDecider::Process 的状态为OKreturn Status::OK();} else { // has change lane in reference lines.// 获取自车当前所在车道的IDauto current_path_id = GetCurrentPathId(*reference_line_info);// 如果当前所在车道为空,则返回error状态if (current_path_id.empty()) {const std::string msg = "The vehicle is not on any reference line";AERROR << msg;return Status(ErrorCode::PLANNING_ERROR, msg);}// 如果上一时刻处在变道中,根据上一时刻自车所处道路ID与当前时刻所处道路ID对比,来确认变道状态if (prev_status->status() == ChangeLaneStatus::IN_CHANGE_LANE) {// ID相同则说明变道还在进行中,if (prev_status->path_id() == current_path_id) {// 同时调用PrioritizeChangeLane(),将目标车道的reference line放在首位PrioritizeChangeLane(true, reference_line_info);} else {// RemoveChangeLane(reference_line_info);// ID不同则说明变道已经完成,PrioritizeChangeLane(false, reference_line_info);ADEBUG << "removed change lane.";// 更新状态UpdateStatus(now, ChangeLaneStatus::CHANGE_LANE_FINISHED,current_path_id);}return Status::OK();// 上一时刻变道失败} else if (prev_status->status() == ChangeLaneStatus::CHANGE_LANE_FAILED) {// TODO(SHU): add an optimization_failure counter to enter// change_lane_failed status// 判断当前时刻减上一时刻的时间差是否小于换道失败冻结时间// not allowed to change lane this amount of time if just failedif (now - prev_status->timestamp() <lane_change_decider_config.change_lane_fail_freeze_time()) {// RemoveChangeLane(reference_line_info);PrioritizeChangeLane(false, reference_line_info);ADEBUG << "freezed after failed";} else {UpdateStatus(now, ChangeLaneStatus::IN_CHANGE_LANE, current_path_id);ADEBUG << "change lane again after failed";}return Status::OK();// 若上一时刻换道完成} else if (prev_status->status() ==ChangeLaneStatus::CHANGE_LANE_FINISHED) {// 判断当前时刻减上一时刻的时间差是否小于换道完成冻结时间if (now - prev_status->timestamp() <lane_change_decider_config.change_lane_success_freeze_time()) {// RemoveChangeLane(reference_line_info);PrioritizeChangeLane(false, reference_line_info);ADEBUG << "freezed after completed lane change";} else {PrioritizeChangeLane(true, reference_line_info);UpdateStatus(now, ChangeLaneStatus::IN_CHANGE_LANE, current_path_id);ADEBUG << "change lane again after success";}} else {const std::string msg =absl::StrCat("Unknown state: ", prev_status->ShortDebugString());AERROR << msg;return Status(ErrorCode::PLANNING_ERROR, msg);}}return Status::OK();
}
LANE_CHANGE_DECIDER相关子函数
PrioritizeChangeLane
// 提升变道的优先级,找到变道的参考线,并将其置于首位(is_prioritize_change_lane == true)
void LaneChangeDecider::PrioritizeChangeLane(const bool is_prioritize_change_lane,std::list<ReferenceLineInfo>* reference_line_info) const {if (reference_line_info->empty()) {AERROR << "Reference line info empty";return;}const auto& lane_change_decider_config = config_.lane_change_decider_config();// TODO(SHU): disable the reference line order change for nowif (!lane_change_decider_config.enable_prioritize_change_lane()) {return;}// 遍历reference_line_info列表中的元素,并检查当前元素是否为变道路径(IsChangeLanePath)// 找到第一个需要优先排序的元素后,循环会被中断// 0、is_prioritize_change_lane 根据参考线数量置位True 或 False// 1、如果is_prioritize_change_lane为True// 首先获取第一条参考线的迭代器,然后遍历所有的参考线,// 如果当前的参考线为允许变道参考线,则将第一条参考线更换为当前迭代器所指向的参考线,// 注意,可变车道为按迭代器的顺序求取,一旦发现可变车道,即推出循环。// // 2、如果is_prioritize_change_lane 为False,// 找到第一条不可变道的参考线,将第一条参考线更新为当前不可变道的参考线auto iter = reference_line_info->begin();while (iter != reference_line_info->end()) {ADEBUG << "iter->IsChangeLanePath(): " << iter->IsChangeLanePath();/* is_prioritize_change_lane == true: prioritize change_lane_reference_lineis_prioritize_change_lane == false: prioritizenon_change_lane_reference_line */if ((is_prioritize_change_lane && iter->IsChangeLanePath()) ||(!is_prioritize_change_lane && !iter->IsChangeLanePath())) {ADEBUG << "is_prioritize_change_lane: " << is_prioritize_change_lane;ADEBUG << "iter->IsChangeLanePath(): " << iter->IsChangeLanePath();break;}++iter;}// 将变道的参考线置于列表首位(is_prioritize_change_lane == true)reference_line_info->splice(reference_line_info->begin(),*reference_line_info, iter);ADEBUG << "reference_line_info->IsChangeLanePath(): "<< reference_line_info->begin()->IsChangeLanePath();
}
UpdateStatus
void LaneChangeDecider::UpdateStatus(double timestamp,ChangeLaneStatus::Status status_code,const std::string& path_id) {auto* lane_change_status = injector_->planning_context()->mutable_planning_status()->mutable_change_lane();lane_change_status->set_timestamp(timestamp);lane_change_status->set_path_id(path_id);lane_change_status->set_status(status_code);
}
IsClearToChangeLane
// 用于检查当前参考线是否安全,或者当前参考线是否可以偏离后返回
bool LaneChangeDecider::IsClearToChangeLane(ReferenceLineInfo* reference_line_info) {// 获得当前参考线自车的s坐标的起点与终点,以及自车线速度double ego_start_s = reference_line_info->AdcSlBoundary().start_s();double ego_end_s = reference_line_info->AdcSlBoundary().end_s();double ego_v =std::abs(reference_line_info->vehicle_state().linear_velocity());// 遍历障碍物,跳过虚拟的和静止的for (const auto* obstacle :reference_line_info->path_decision()->obstacles().Items()) {if (obstacle->IsVirtual() || obstacle->IsStatic()) {ADEBUG << "skip one virtual or static obstacle";continue;}// 初始化SLdouble start_s = std::numeric_limits<double>::max();double end_s = -std::numeric_limits<double>::max();double start_l = std::numeric_limits<double>::max();double end_l = -std::numeric_limits<double>::max();// 获取动态障碍物的边界点并转化为SL坐标for (const auto& p : obstacle->PerceptionPolygon().points()) {SLPoint sl_point;reference_line_info->reference_line().XYToSL(p, &sl_point);start_s = std::fmin(start_s, sl_point.s());end_s = std::fmax(end_s, sl_point.s());start_l = std::fmin(start_l, sl_point.l());end_l = std::fmax(end_l, sl_point.l());}// 以障碍物在S方向上的起始点与终点之和的二分之一作为障碍物中心点si,获取si点的道路宽度// 若障碍物在车道线之外,则不考虑if (reference_line_info->IsChangeLanePath()) {double left_width(0), right_width(0);reference_line_info->mutable_reference_line()->GetLaneWidth((start_s + end_s) * 0.5, &left_width, &right_width);if (end_l < -right_width || start_l > left_width) {continue;}}// Raw estimation on whether same direction with ADC or not based on// prediction trajectory// 根据预测轨迹粗略判断障碍物的方向是否和自车相同bool same_direction = true;if (obstacle->HasTrajectory()) {double obstacle_moving_direction =obstacle->Trajectory().trajectory_point(0).path_point().theta();const auto& vehicle_state = reference_line_info->vehicle_state();// 获取车辆航向角double vehicle_moving_direction = vehicle_state.heading();if (vehicle_state.gear() == canbus::Chassis::GEAR_REVERSE) {vehicle_moving_direction =common::math::NormalizeAngle(vehicle_moving_direction + M_PI);}double heading_difference = std::abs(common::math::NormalizeAngle(obstacle_moving_direction - vehicle_moving_direction));same_direction = heading_difference < (M_PI / 2.0);}// TODO(All) move to confsstatic constexpr double kSafeTimeOnSameDirection = 3.0;static constexpr double kSafeTimeOnOppositeDirection = 5.0;static constexpr double kForwardMinSafeDistanceOnSameDirection = 10.0;static constexpr double kBackwardMinSafeDistanceOnSameDirection = 10.0;static constexpr double kForwardMinSafeDistanceOnOppositeDirection = 50.0;static constexpr double kBackwardMinSafeDistanceOnOppositeDirection = 1.0;static constexpr double kDistanceBuffer = 0.5;double kForwardSafeDistance = 0.0;double kBackwardSafeDistance = 0.0;// 根据方向、自车与运动障碍物之间速度关系设置安全距离if (same_direction) {kForwardSafeDistance =std::fmax(kForwardMinSafeDistanceOnSameDirection,(ego_v - obstacle->speed()) * kSafeTimeOnSameDirection);kBackwardSafeDistance =std::fmax(kBackwardMinSafeDistanceOnSameDirection,(obstacle->speed() - ego_v) * kSafeTimeOnSameDirection);} else {kForwardSafeDistance =std::fmax(kForwardMinSafeDistanceOnOppositeDirection,(ego_v + obstacle->speed()) * kSafeTimeOnOppositeDirection);kBackwardSafeDistance = kBackwardMinSafeDistanceOnOppositeDirection;}// 通过滞后滤波器判断障碍物是否满足安全距离if (HysteresisFilter(ego_start_s - end_s, kBackwardSafeDistance,kDistanceBuffer, obstacle->IsLaneChangeBlocking()) &&HysteresisFilter(start_s - ego_end_s, kForwardSafeDistance,kDistanceBuffer, obstacle->IsLaneChangeBlocking())) {reference_line_info->path_decision()->Find(obstacle->Id())->SetLaneChangeBlocking(true);ADEBUG << "Lane Change is blocked by obstacle" << obstacle->Id();return false;} else {reference_line_info->path_decision()->Find(obstacle->Id())->SetLaneChangeBlocking(false);}}return true;
}
HysteresisFilter
// 滞后滤波器
// 在安全距离附近的情况下,通过引入距离缓冲区来调整安全距离的大小,从而避免频繁进行车道变换。
bool LaneChangeDecider::HysteresisFilter(const double obstacle_distance,const double safe_distance,const double distance_buffer,const bool is_obstacle_blocking) {if (is_obstacle_blocking) {// obstacle_distance是否小于safe_distance + distance_buffer,如果是则返回true,否则返回false。return obstacle_distance < safe_distance + distance_buffer;} else {// obstacle_distance是否小于safe_distance - distance_buffer,如果是则返回true,否则返回false。return obstacle_distance < safe_distance - distance_buffer;}
}
参考
[1] Apollo规划模块详解(五):算法实现-lane change decider
[2] Apollo Planning决策规划代码详细解析 (6):LaneChangeDecider
[3] 百度Apollo5.0规划模块代码学习(四)换道决策分析
[4] Apollo planning lane_change_decider解析
相关文章:
【Apollo学习笔记】——规划模块TASK之LANE_CHANGE_DECIDER
文章目录 前言LANE_CHANGE_DECIDER功能简介LANE_CHANGE_DECIDER相关配置LANE_CHANGE_DECIDER总体流程LANE_CHANGE_DECIDER相关子函数PrioritizeChangeLaneUpdateStatusIsClearToChangeLaneHysteresisFilter 参考 前言 在Apollo星火计划学习笔记——Apollo路径规划算法原理与实…...
rabbitmq的死信队列
目录 成为死信的条件 消息TTL过期 队列达到最大长度 消息被拒 延迟队列 延迟队列使用场景 消息设置 TTL 队列设置 TTL 两者区别 producer 将消息投递到 broker 或者直接到 queue 里了, consumer 从 queue 取出消息 进行消费,但某些时候由…...

利用网络对拷工具进行系统安装与恢复
各学校计算机机房经常批量安装操作系统和应用软件。实现对批量计算机的安 装,应用较多的是使用 Symantec 的 ghost 企业版。但笔者采用的是网络还原精灵 (Net Recovery Genius)软件附带的网络对拷 Ncp.com 工具,利用它能够轻松实…...

opencv-python使用鼠标点击图片显示该点坐标和像素值IPM逆透视变换车道线二值化处理
OpenCV的鼠标操作 实现获取像素点的功能主要基于OpenCV的内置函数cv2.setMouseCallback(),即鼠标事件回调 setMouseCallback(winname, onMouse,userdata0) winname: 接收鼠标事件的窗口名称 onMouse: 处理鼠标事件的回调函数指针 userdata: 传给回调函数的用户数据…...

AIGC绘画:kaggle部署stable diffusion项目绘画
文章目录 kaggle介绍项目部署edit my copy链接显示 结果展示 kaggle介绍 Kaggle成立于2010年,是一个进行数据发掘和预测竞赛的在线平台。从公司的角度来讲,可以提供一些数据,进而提出一个实际需要解决的问题;从参赛者的角度来讲&…...
微服务概述-7
Shiro 框架 Shiro 是一个用于 Java 应用程序的安全框架。它提供了身份验证、授权、加密和会话管理等功能,可以帮助开发人员构建安全可靠的应用程序。 Java 中针对权限管理常见的有 2 个著名的框架:spring security 和 shiro shiro 基本概念 credentia…...
十二、Linux如何修改文件/文件夹所属用户or用户组?chown命令
目录 1、基础语法 2、修改目标用户: 3、修改用户组: 4、使用-R命令,并同时修改用户/用户组 1、基础语法 chown [-R] [目标用户][:][目标用户组] 被修改文件/文件夹 (1)选项-R:同chmod,对文…...
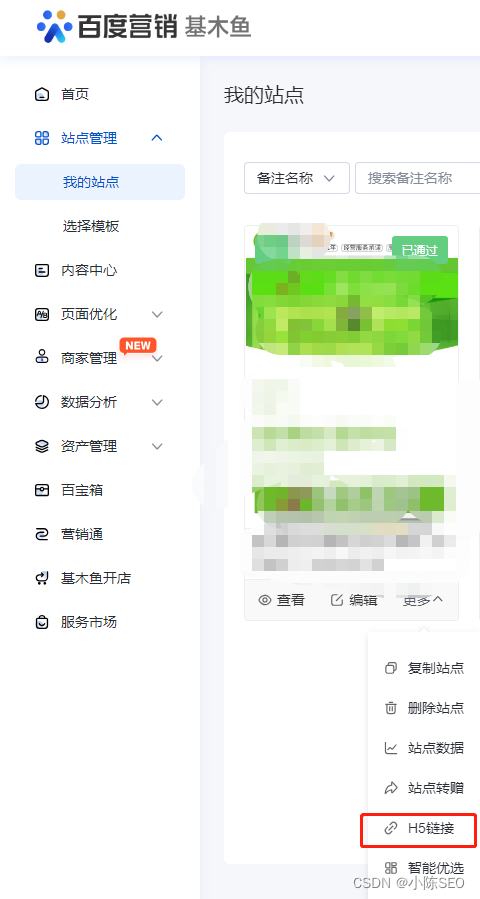
企业百家号蓝V认证后,百度营销基木鱼落地页如何嵌入百家号中
首先搭建百度营销基木鱼落地页 在我们的百度营销后台,点击基木鱼跳转至百度营销基木鱼页面,在我的站点位置,可以创建H5站点,PC站点等,创建完成后可以点击复制基木鱼落地页的链接。 注意事项 1、企业百家号需要进行…...
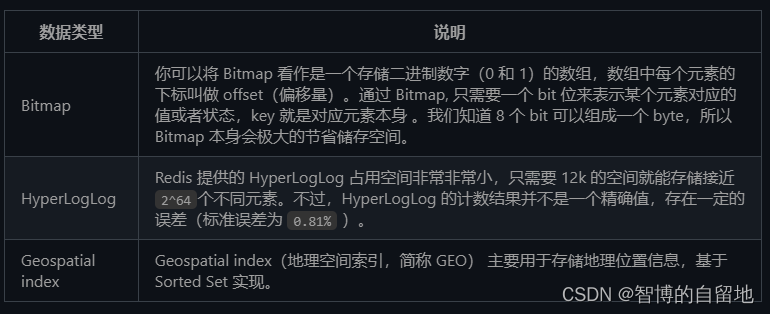
Redis缓存读写策略(三种)数据结构(5+3)
Redis缓存读写策略(三种) Cache Aside Pattern(旁路缓存模式) Cache Aside Pattern 是我们平时使用比较多的一个缓存读写模式,比较适合读请求比较多的场景。 写: 先更新 db然后直接删除 cache 。 读 : …...
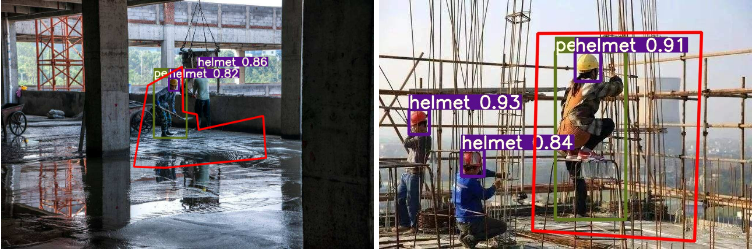
计算机竞赛 Yolov安全帽佩戴检测 危险区域进入检测 - 深度学习 opencv
1 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 Yolov安全帽佩戴检测 危险区域进入检测 🥇学长这里给一个题目综合评分(每项满分5分) 难度系数:3分工作量:3分创新点:4分 该项目较为新颖&am…...

使用python向窗口发送鼠标点击命令
今天遇到一个问题。公司让用电脑在网页上看个视频。网页有个判断:一段时间没有鼠标活动,视频就会暂停。于是就想,能否隔一段时间就模拟鼠标点击一下视频暂停,再点一下继续播放。省得它自己停止播放。这样我就可以让网页窗口在后台…...
 unique_lock(类模板))
C++11并发与多线程笔记(6) unique_lock(类模板)
C11并发与多线程笔记(6) unique_lock(类模板) 1、unique_lock取代lock_guard2、unique_lock的第二个参数2.1 std::adopt_lock:2.2 std::try_to_lock:2.3 std::defer_lock: 3、unique_lock的成员…...
计算机网络——OSI与TCP/IP各层的结构与功能,都有哪些协议?
文章目录 一 OSI与TCP/IP各层的结构与功能,都有哪些协议?1.1 应用层1.2 运输层1.3 网络层1.4 数据链路层1.5 物理层1.6 总结一下 二 ⭐TCP 三次握手和四次挥手(面试常客)2.1 TCP 三次握手漫画图解2.2 为什么要三次握手⭐2.3 第2次握手传回了ACK,为什么还要传回SYN&…...

Win7 x86 家庭版SP1 配置 Python 开发环境
1 Win7 下载地址 来源于 MSDN, 我告诉你 - 做一个安静的工具站 ed2k://|file|cn_windows_7_home_basic_with_sp1_x86_dvd_u_676500.iso|2653276160|843E7A78F2126FAC726CF5342710082D|/ 2 Python 版本选择 Python 3.7.9 Python Release Python 3.7.9 | Python.org 3 Pychar…...

从零玩转系列之微信支付实战PC端装修我的订单页面 | 技术创作特训营第一期
一、前言 欢迎来到本期的博客!本篇文章是 PC 端的结尾了,前面经历过九个章节到本章节刚刚好十章节感谢观看我的文章,那么接下来我们将要编写的是我的订单页面. GGBOM! 本篇完毕后将是 UniApp 的篇章感受移动端的诱惑 💗 本次为前端知识点如果不懂前段可以…...
ChatGPT和Claude的能力全测评
创造性思维/语言 提示:“写一首 4 行诗,每行只有 3 个词,描写重庆” ChatGPT写诗👇 Claude写诗👇 仁者见仁,您怎么看谁更强? 提示: "如果你随机选择这个问题的答案,…...

ffmpeg简介
1.什么是ffmpeg ffmpeg即使一款音视频编解码工具,同时也是一组音视频编解码开发套件,作为编解码开发套件,它为开发者提供了丰富的音视频处理的调用接口。 ffmpeg提供了多种媒体格式的封装和解封装,包括多种音视频编码、多种协议…...

AI绘画 stable diffusion Midjourney 官方GPT文档 AIGC百科全书资料收集
教学AI绘画 AIGC工具 SD教程 ###Redis面试题 单机Redis的qps大概是多少? 项目中用到了哪些Redis的数据类型?为什么这么用? Redis的key到了过期时间就被删除了吗?简述下Redis的过期策略? Redis有哪几种内存淘汰策略…...

Lombok注解大全
一、安装插件,eclipse 对于 lombok 的支持 二、引入依赖 <dependency><groupId>org.projectlombok</groupId><artifactId>lombok</artifactId><version>1.18.20</version> <!-- Spring Boot 项目此部分可以不写 --&g…...
STM32--ADC模数转换
文章目录 ADC简介逐次逼近型ADCADC框图转换模式数据对齐转换时间校准ADC基本结构ADC单通道工程代码: ADC简介 STM32的ADC(Analog-Digital Converter)模拟-数字转换器,是一种逐次逼近型模拟数字转换器,可以将引脚上连续…...
)
手把手教你用CsvView分析大疆无人机飞行日志(附实战CTF题解)
从零破解大疆飞行日志:CsvView高阶技巧与CTF实战全解析 无人机取证领域正成为网络安全竞赛的新热点。去年某省级CTF赛事中,一道涉及大疆飞行日志分析的题目淘汰了近60%参赛队伍——不是因为他们缺乏编程能力,而是不熟悉专业工具链的操作细节…...

扩散模型频谱分析:提升图像生成质量的关键技术
1. 扩散模型中的频谱分析基础在计算机视觉和生成式AI领域,扩散模型已经成为图像生成的主流技术之一。但很少有人注意到,频谱特性直接影响着生成图像的质量和训练效率。我在实际项目中发现,对扩散模型进行频谱分析可以揭示许多隐藏的优化机会。…...
)
用OpenCV和Python手把手实现Meanshift目标跟踪(附完整代码与避坑指南)
用OpenCV和Python手把手实现Meanshift目标跟踪(附完整代码与避坑指南) 在计算机视觉领域,目标跟踪是一个基础而重要的任务。想象一下这样的场景:你正在开发一个智能监控系统,需要持续追踪画面中的特定行人;…...

老板作息表里的时间漏洞?我用Python写了个脚本,5分钟找出所有空白时段
老板作息表里的时间漏洞?我用Python写了个脚本,5分钟找出所有空白时段 最近在整理团队日程时,发现一个有趣的现象:即使是再严谨的时间表,也总会有未被记录的空白时段。这些"时间漏洞"可能意味着未被充分利用…...
推出的一款 USB 3.0 主机控制器芯片,支持 xHCI 1.0 和 PCIe Gen2 接口标)
UPD720202K8-711-BAA-A 是瑞萨电子(Renesas Electronics)推出的一款 USB 3.0 主机控制器芯片,支持 xHCI 1.0 和 PCIe Gen2 接口标
UPD720202K8-711-BAA-A 是瑞萨电子(Renesas Electronics)推出的一款 USB 3.0 主机控制器芯片,支持 xHCI 1.0 和 PCIe Gen2 接口标准,适用于高性能 USB 接口扩展方案。 核心特性: 接口标准:USB 3.0&…...

流媒体订阅自动取消?原来是同步与异步的竞态条件在作祟!
自动取消的订阅2026 年 4 月 1 日,这篇文章是 [四月趣事俱乐部] 的一部分,是一项在愚人节发布关于意外话题的真实文章的活动。几个月前的一个周五晚上,作者和家人打算在常用的流媒体平台上放松看节目,该订阅服务是一张信用卡的福利…...

WeDot引擎:开源游戏引擎架构解析与开发实践指南
1. 项目概述与核心定位如果你是一名游戏开发者,尤其是对Unity或Godot这类主流引擎的某些方面感到“意难平”,或者你正渴望一个更纯粹、更专注于游戏创作本身的开发环境,那么WeDot引擎的出现,或许能给你带来一些新的启发。WeDot是一…...

ARM1136JF-S处理器测试信号与功能变更解析
1. ARM1136JF-S处理器测试信号深度解析在嵌入式系统开发领域,处理器测试信号的理解和运用是硬件验证和调试的基础。ARM1136JF-S作为经典的ARM11系列处理器,其测试接口设计体现了ARM架构对可测试性的重视。让我们深入剖析这些关键信号及其应用场景。1.1 扫…...

终极健康办公指南:Stretchly科学休息管理工具完全解析
终极健康办公指南:Stretchly科学休息管理工具完全解析 【免费下载链接】stretchly The break time reminder app 项目地址: https://gitcode.com/gh_mirrors/st/stretchly 在数字时代,长时间面对电脑屏幕已成为现代职场人士的日常。Stretchly作为…...

Bottleneck实战:从零构建高并发API限流系统
Bottleneck实战:从零构建高并发API限流系统 【免费下载链接】bottleneck Job scheduler and rate limiter, supports Clustering 项目地址: https://gitcode.com/gh_mirrors/bo/bottleneck 在当今高并发的网络环境中,API限流是保障服务稳定性的关…...