Pico如何使用C/C++选择哪个I2C控制器,以及SDA和SCL针脚
本文一开始讲述了解决方案,后面是我做的笔记,用来讲述我的发现流程和探究的 Pico I2C 代码结构。
前提知识
首先要说明一点:Pico 有两个 I2C,也就是两套 SDA 和 SCL。这点你可以在针脚图中名字看出,比如下图的 Pin 4 和 Pin 5是 I2C1 的,而默认的 Pin 6 和 Pin 7 是 I2C0 的。

默认情况下是只开启了第一个 I2C,也就是只有 I2C0 的针脚是可以使用的。如果这种情况下,你哪怕修改了针脚,但不是 I2C0 的,也是不会正常运行的。
如何选择哪个I2C控制器,以及SDA和SCL针脚
在设置之前声明三个变量或宏来方便开发。建议使用宏,这比较符合树莓派的开发风格:
#define I2C i2c0
#define I2C_SDA_PIN 4
#define I2C_SCL_PIN 5
如果宏扩展出错,那么就使用变量。
然后初始化 I2C 的时候来设置使用哪个 I2C 控制器,以及哪个SDA和SCL针脚。下面是设置根据上面的设置,这里使用的是第一个 I2C 控制器,SDA 使用的是 GP4,SCL 使用的是 GP5,频率为1000000:
i2c_init(I2C, 1000000);
gpio_set_function(I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(I2C_SDA_PIN);
gpio_pull_up(I2C_SCL_PIN);
由于有两个 I2C 控制器,那么可以同时使用两套SDA和SCL针脚,但是要注意必须是I2C0和I2C1的针脚,不能是同一个控制器的。
发现历程(选读)
这部分不一定要看。这里记录一下我是怎么知道是这样处理的,顺道了解了一下代码结构和信息传递的流程,万一以后需要就不用花时间翻来翻去了。
第一次尝试
首先分析一下:要定义针脚就要知道针脚这个值是如何被利用的,这样就可以知道如何传递处理这个值了。
一般是在初始化的时候设置使用哪个I2C控制器以及SDA和SCL针脚,代码一般如下:
i2c_init(i2c_default, CLK);
gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
研究《用C/C++修改I2C默认的SDA和SCL针脚》的时候,我知道了默认针脚是在pico.h中配置的的,相关值有三个:PICO_DEFAULT_I2C、PICO_DEFAULT_I2C_SDA_PIN和PICO_DEFAULT_I2C_SCL_PIN,那么只要追溯这三个值就行。
但是这样不好找,引用太多了。所以我就尝试了从另一方面先入手:I2C 是通过i2c_init()函数初始化的,如下:
i2c_init(i2c_default, SSD1306_I2C_CLK);
我需要的只有第一个参数i2c_default,因为这个参数传递了一些信息,第二个参数uint baudrate是传递速率的,和针脚无关。
那么i2c_init()函数的内容是什么呢?知道这个才能知道i2c_default的类型是什么结构,以及内部进行了什么处理。
i2c_init()函数声明在pico-sdk/src/rp2_common/hardware_i2c/i2c.c中,函数参数列表如下:
uint i2c_init(i2c_inst_t *i2c, uint baudrate) {i2c_reset(i2c);i2c_unreset(i2c);i2c->restart_on_next = false;i2c->hw->enable = 0;...// Re-sets i2c->hw->enable upon returning:return i2c_set_baudrate(i2c, baudrate);
}
那这个i2c_inst_t是个什么数据类型呢?我就继续找它。
在pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h的第 52 行可以看到它是i2c_inst结构体的重命名:
typedef struct i2c_inst i2c_inst_t;
那继续找结构体i2c_inst,这个结构体就在同一个文件里的第 135 行:
struct i2c_inst {i2c_hw_t *hw;bool restart_on_next;
};
终点还是第一个变量i2c_hw_t *hw,因为只有它可能会传递针脚的值,那就继续找i2c_hw_t是什么数据类型。
这个数据类型的声明在pico-sdk/src/rp2040/hardware_structs/include/hardware/structs/i2c.h中。换句话说,这个文件就是为i2c_hw_t结构体所准备的:
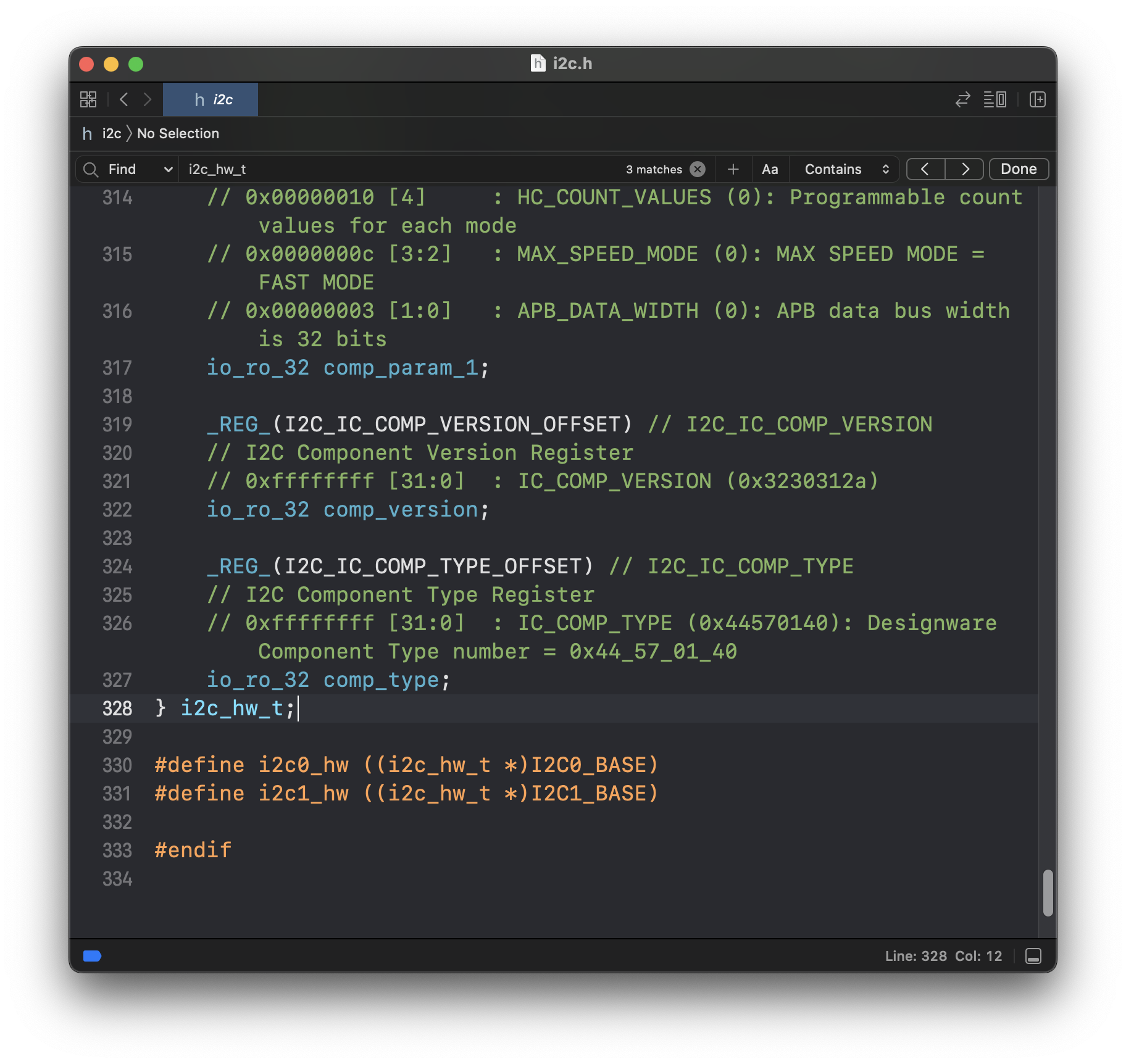
这个结构体存储了很多 I2C 的信息,但还是没找到针脚的信息,那么我就回到一开始在进行寻找。
第二次尝试
最开始我是寻找了i2c_init()的第一个参数的类型i2c_inst_t,收获不大。但是它的值我还没寻找,所以这次从参数值出发i2c_default,这个值是哪定义的呢?
在刚才发现i2c_inst_t声明和定义的pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h头文件中发现了需要的东西(第 76 行):
#ifdef PICO_DEFAULT_I2C_INSTANCE
#define i2c_default PICO_DEFAULT_I2C_INSTANCE
#endif
这个PICO_DEFAULT_I2C_INSTANCE是什么呢?往上一瞅就能看到:
#if !defined(PICO_DEFAULT_I2C_INSTANCE) && defined(PICO_DEFAULT_I2C)
#define PICO_DEFAULT_I2C_INSTANCE (__CONCAT(i2c,PICO_DEFAULT_I2C))
#endif
在这里终于看到一个需要的值:PICO_DEFAULT_I2C,前文可知这个默认为0。
这里的(__CONCAT(i2c,PICO_DEFAULT_I2C))是将i2c和PICO_DEFAULT_I2C的值连接起来了,默认情况下也就是i2c0。也就是说,参数i2c_default就是i2c0。
这个技巧很不错,但是有些编译器用不了,比如我用 Clang x86_64-apple-darwin21.6.0 就无法扩展
PICO_DEFAULT_I2C。
再深入一些
但是这里的i2c0是什么呢?这是个什么类型的数据呢?
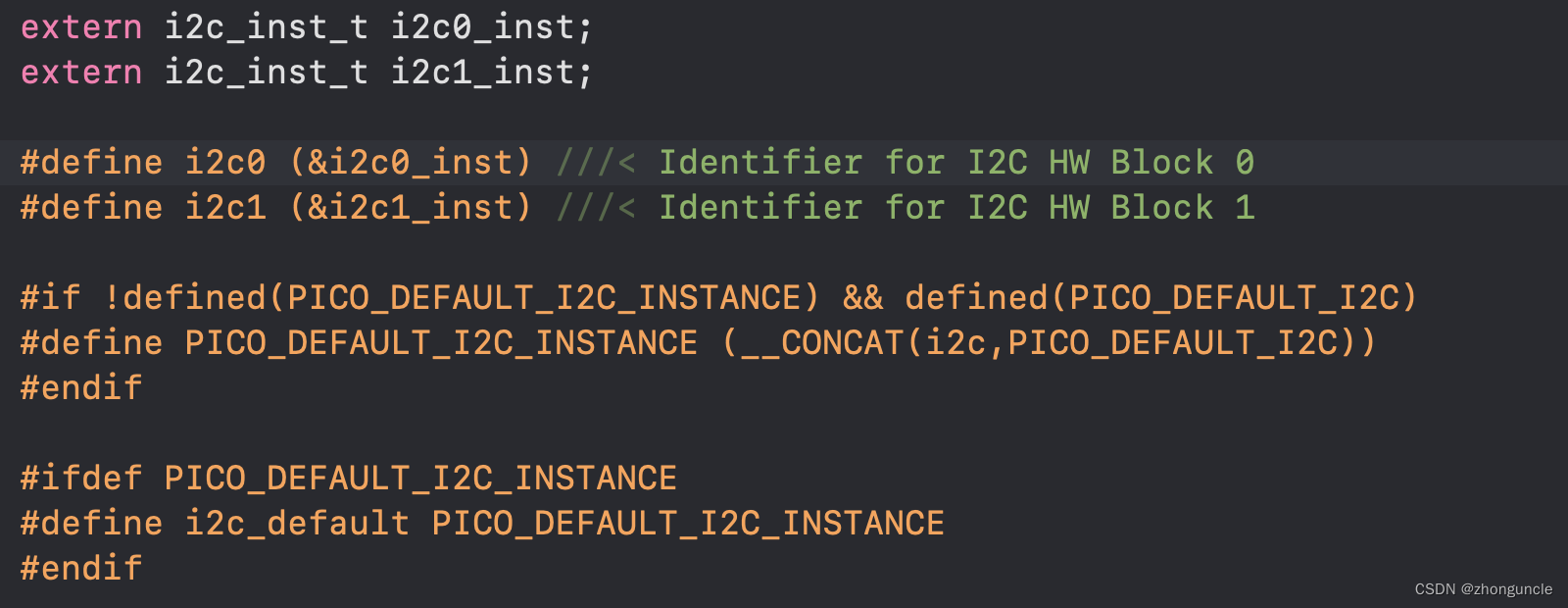
还是在pico-sdk/src/rp2_common/hardware_i2c/include/hardware/i2c.h头文件中(如上图)有这样一段:
#define i2c0 (&i2c0_inst) ///< Identifier for I2C HW Block 0
#define i2c1 (&i2c1_inst) ///< Identifier for I2C HW Block 1
可以看到i2c0是i2c0_inst的地址,注释说这是I2C HW Block 0的标识符。从上面的
extern i2c_inst_t i2c0_inst;
extern i2c_inst_t i2c1_inst;
可以看到i2c0_inst和i2c1_inst是外部变量,类型是i2c_inst_t,这个类型之前我看到了定义的结构体:
struct i2c_inst {i2c_hw_t *hw;bool restart_on_next;
};
那这个i2c0_inst是在哪声明的?
这部分在pico-sdk/src/rp2_common/hardware_i2c/i2c.c中声明的:
i2c_inst_t i2c0_inst = {i2c0_hw, false};
i2c_inst_t i2c1_inst = {i2c1_hw, false};
这个i2c0_hw又是啥呢?在哪定义的呢?
这是在pico-sdk/src/rp2040/hardware_structs/include/hardware/structs/i2c.h中:
#define i2c0_hw ((i2c_hw_t *)I2C0_BASE)
#define i2c1_hw ((i2c_hw_t *)I2C1_BASE)
i2c0_hw表示((i2c_hw_t *)I2C0_BASE),意思是I2C0_BASE是个指向i2c_hw_t的指针,它的内容在pico-sdk/src/rp2040/hardware_regs/include/hardware/regs/addressmap.h中:
#define I2C0_BASE _u(0x40044000)
#define I2C1_BASE _u(0x40048000)
也就是说I2C0_BASE就是0x40044000,而i2c0_hw的地址就是0x40044000。
补充一点,这里_()是无符号整数的意思,定义在pico-sdk/src/rp2040/hardware_regs/include/hardware/platform_defs:
#ifndef _u
#ifdef __ASSEMBLER__
#define _u(x) x
#else
#define _u(x) x ## u
#endif
#endif
了解了蛮多知识,也希望能帮到有需要的人~
相关文章:
Pico如何使用C/C++选择哪个I2C控制器,以及SDA和SCL针脚
本文一开始讲述了解决方案,后面是我做的笔记,用来讲述我的发现流程和探究的 Pico I2C 代码结构。 前提知识 首先要说明一点:Pico 有两个 I2C,也就是两套 SDA 和 SCL。这点你可以在针脚图中名字看出,比如下图的 Pin 4…...
求生之路2私人服务器开服搭建教程centos
求生之路2私人服务器开服搭建教程centos 大家好我是艾西,朋友想玩求生之路2(left4dead2)重回经典。Steam玩起来有时候没有那么得劲,于是问我有没有可能自己搭建一个玩玩。今天跟大家分享的就是求生之路2的自己用服务器搭建的一个心路历程。 ࿰…...

Redis7之介绍(一)
1. 是什么 Redis:REmote Dictionary Server(远程字典服务器) Remote Dictionary Server( 远程字典服务)是完全开源的,使用ANSIC语言编写遵守BSD协议,是一个高性能的Key-Value数据库提供了丰富的数据结构,例如String、Hash、List、…...
基于Python+djangoAI 农作物病虫害预警系统智能识别系统设计与实现(源码&教程)
1.背景 随着科技的发展,机器学习技术在各个领域中的应用越来越广泛。在农业领域,机器学习技术的应用有助于提高农作物的产量和质量,降低农业生产的成本。本文针对农作物健康识别问题,提出一种基于机器学习方法的农作健康识别系统&…...

Kotlin Flow 转换以及上下游处理
本片文章主要介绍Flow上下游处理,上游一个Flow使用map,上游两个Flow使用zip,上游三个Flow及以上使用combine 1、下面代码展示了upStreamFlow作为上游,downStreamFlow作为下游,通过对upStreamFlow使用map操作符函数将…...
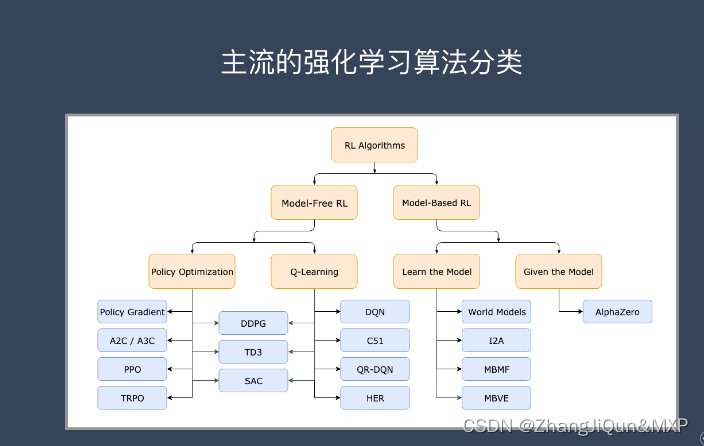
深度学习3. 强化学习-Reinforcement learning | RL
强化学习是机器学习的一种学习方式,它跟监督学习、无监督学习是对应的。本文将详细介绍强化学习的基本概念、应用场景和主流的强化学习算法及分类。 目录 什么是强化学习? 强化学习的应用场景 强化学习的主流算法 强化学习(reinforcement learning) …...

TCP/IP网络江湖武艺传承:物理层与通信江湖的幕后
目录 〇、引言:进入现代通信技术的江湖 一、数字信号与模拟信号:传承与差异...

智慧能源管理系统助力某制造企业提高能源利用效率
随着全球能源需求不断增加和能源价格的上涨,企业和机构日益意识到能源管理的重要性。传统的能源管理方式不仅效率低下,还容易造成资源浪费和环境污染。因此,许多企业开始探索采用智慧能源管理系统来提高能源利用效率,降低能源成本…...
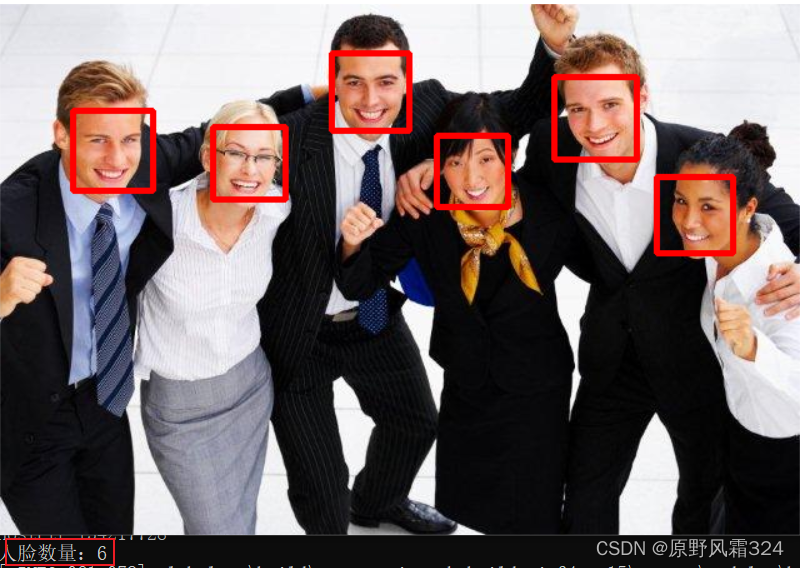
opencv/C++ 人脸检测
前言 本文使用的测试资源说明: opencv版本:opencv 4.6.0 人脸检测算法 Haar特征分类器 Haar特征分类器是一个XML文件,描述了人体各个部位的Haar特征值。包括:人脸、眼睛、鼻子、嘴等。 opencv 4.6.0自带的Haar特征分类器&…...
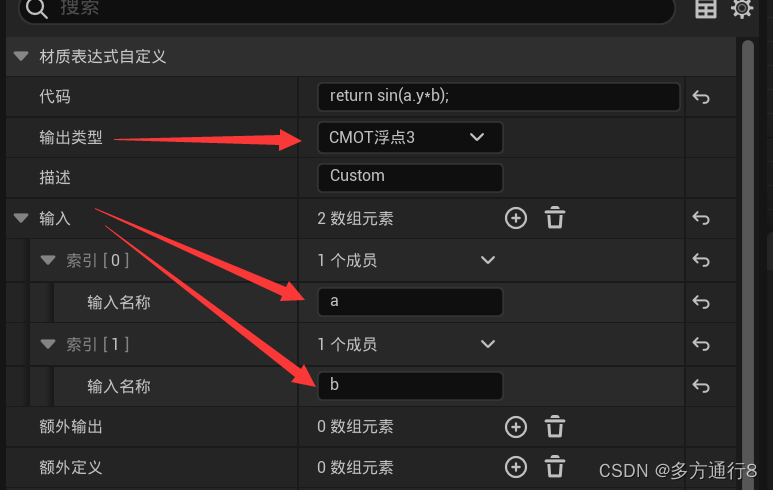
UE4/5的Custom节点:在VScode使用HLSL(新手入门用)
目录 custom节点 VSCode环境安装 将VSCode里面的代码放入Custom中 custom节点 可以看到这是一个简单的Custom节点: 而里面是可以填写代码的: 但是在这里面去写代码会发现十分的繁琐【按下enter后,不会换行,也不会自动缩进】 …...
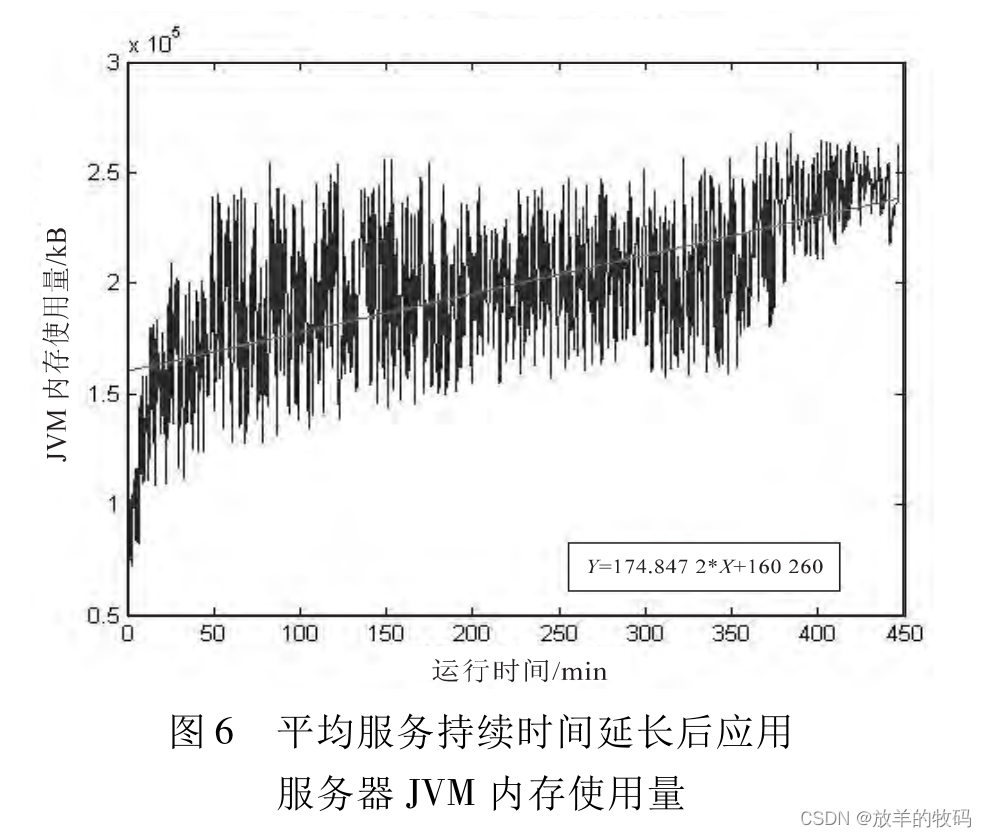
小研究 - J2EE 应用服务器的软件老化测试研究
软件老化现象是影响软件可靠性的重要因素,长期运行的软件系统存在软件老化现象,这将影响整个业务系统的正常运行,给企事业单位带来无可估量的经济损失。软件老化出现的主要原因是操作系统资源消耗殆尽,导致应用系统的性能下降甚至…...

Tomcat和Servlet基础知识的讲解(JavaEE初阶系列16)
目录 前言: 1.Tomcat 1.1Tomcat是什么 1.2下载安装 2.Servlet 2.1什么是Servlet 2.2使用Servlet来编写一个“hello world” 1.2.1创建项目(Maven) 1.2.2引入依赖(Servlet) 1.2.3创建目录(webapp&a…...

开源在大数据和分析中的角色
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...
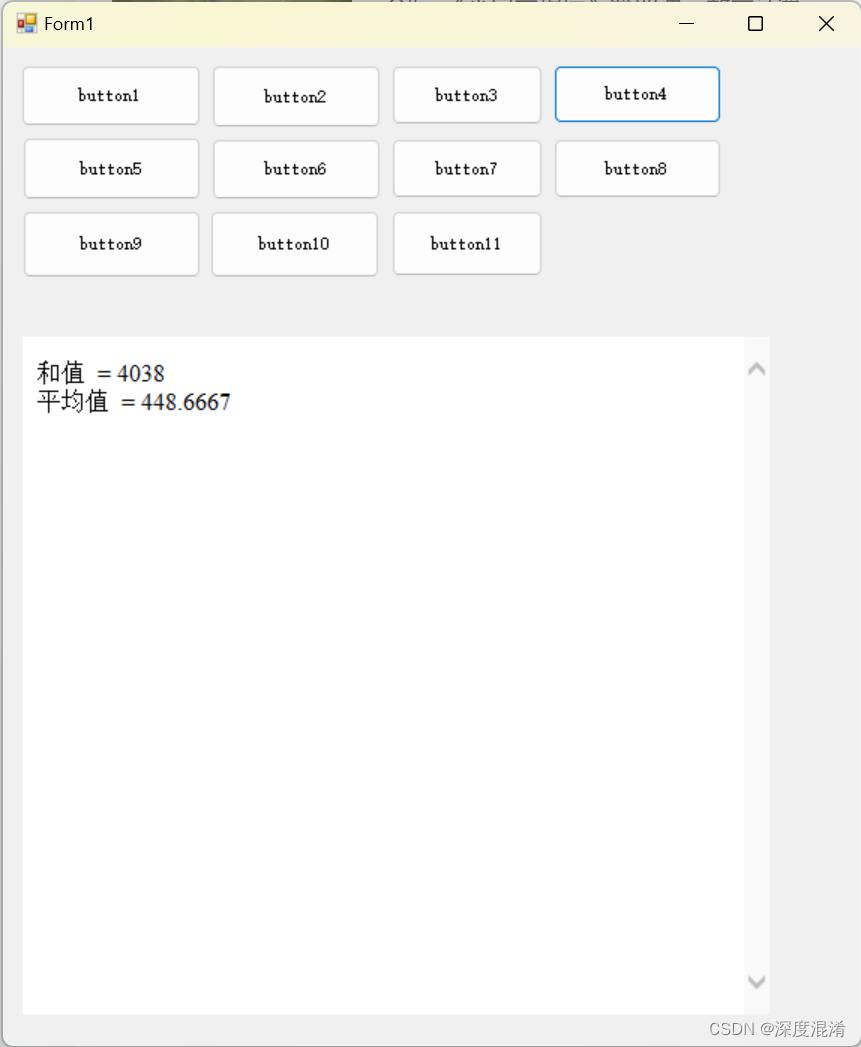
C#,《小白学程序》第四课:数学计算
1 文本格式 /// <summary> /// 《小白学程序》第四课:数学计算 /// 这节课超级简单,就是计算成绩的平均值(平均分) /// 这个是老师们经常做的一件事。 /// </summary> /// <param name"sender"></…...

SparkML机器学习
SparkML 机器学习: 让机器学会人的学习行为, 通过算法和数据来模拟或实现人类的学习行为,使之不断改善自身性能。 机器学习的步骤: 加载数据特征工程 数据筛选: 选取适合训练的特征列, 例如用户id就不适合, 因为它特性太显著.数据转化: 将字符串的数据转化数据类型…...

vue Promise 对象 等待所有异步处理完成 再继续处理
1 定义数据集合 用来搜集所有数据 let promises []; // 用来存储所有的 Promise 对象 2 promise对象 异步 返回数据 同时添加数据到promises 列表 // 依次读取列表元素的表 for (let symbol of symbolList) {let promise new Promise((resolve, reject) > { // 将请求…...
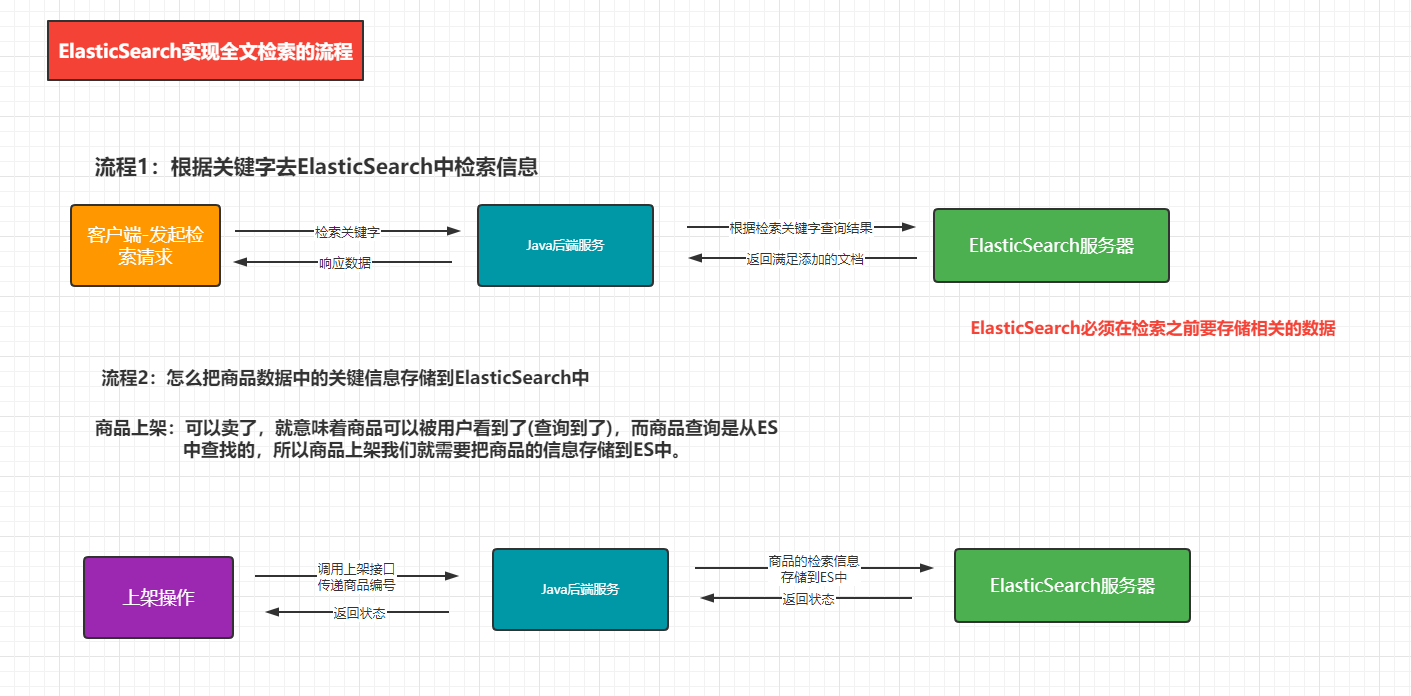
【业务功能篇84】微服务SpringCloud-ElasticSearch-Kibanan-电商实例应用
一、商品上架功能 ElasticSearch实现商城系统中全文检索的流程。 1.商品ES模型 商品的映射关系 PUT product {"mappings": {"properties": {"skuId": {"type": "long"},"spuId": {"type": "ke…...
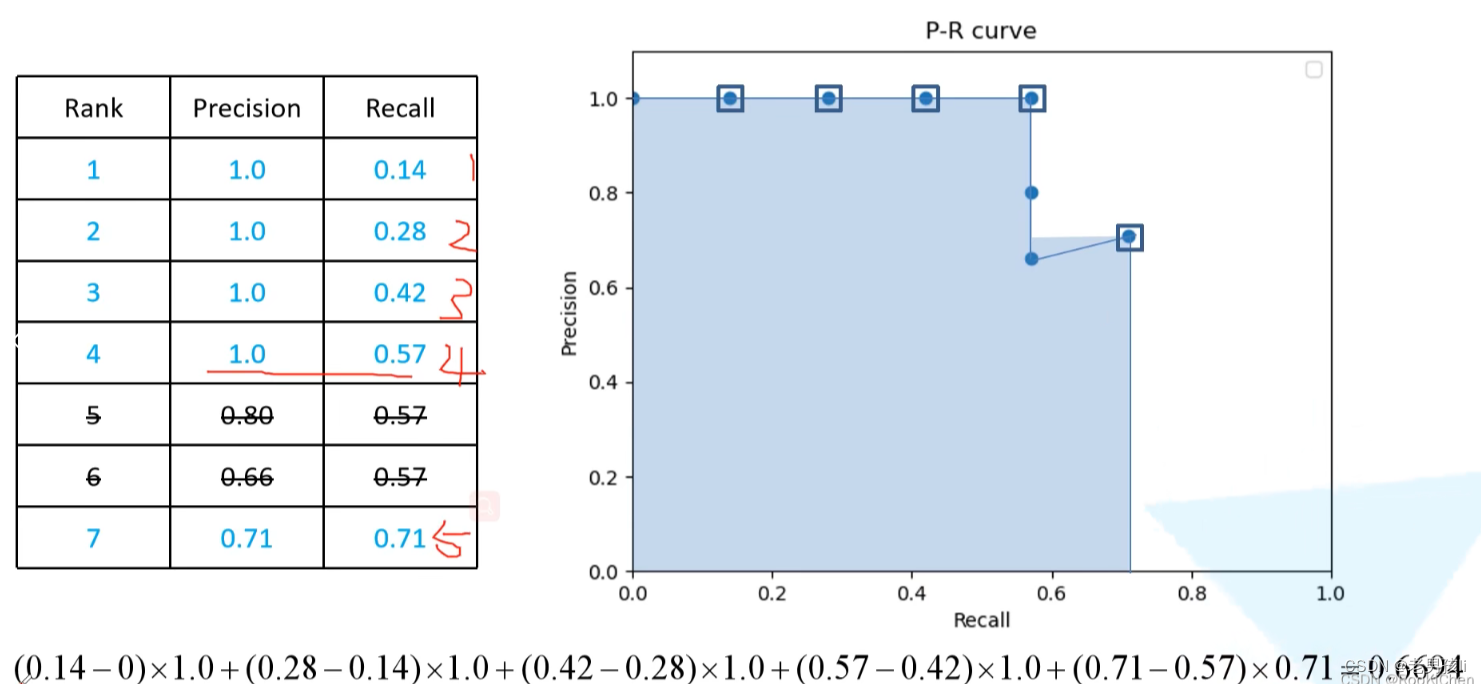
图像检索,目标检测map的实现
一、图像检索指标Rank1,map 参考:https://blog.csdn.net/weixin_41427758/article/details/81188164?spm1001.2014.3001.5506 1.Rank1: rank-k:算法返回的排序列表中,前k位为存在检索目标则称为rank-k命中。 常用的为rank1:首…...

Docker容器学习:Dockerfile制作Web应用系统nginx镜像
目录 编写Dockerfile 1.文件内容需求: 2.编写Dockerfile: 3.开始构建镜像 4.现在我们运行一个容器,查看我们的网页是否可访问 推送镜像到私有仓库 1.把要上传的镜像打上合适的标签 2.登录harbor仓库 3.上传镜像 编写Dockerfile 1.文…...

【vue3.0 引入Element Plus步骤与使用】
全局引入Element Plus 1. 安装 Element Plus2. 引入 Element Plus3. 使用 Element Plus 组件 Element Plus 是一个基于 Vue 3.0 的 UI 组件库,它是 Element UI 的升级版。Element Plus 的设计理念是简单、易用、高效,具有良好的可定制性和扩展性。下面是…...

中南大学无人机智能体的全面评估!BEDI:用于评估无人机上具身智能体的综合性基准测试
作者:Mingning Guo, Mengwei Wu, Jiarun He, Shaoxian Li, Haifeng Li, Chao Tao单位:中南大学地球科学与信息物理学院论文标题:BEDI: A Comprehensive Benchmark for Evaluating Embodied Agents on UAVs论文链接:https://arxiv.…...
python/java环境配置
环境变量放一起 python: 1.首先下载Python Python下载地址:Download Python | Python.org downloads ---windows -- 64 2.安装Python 下面两个,然后自定义,全选 可以把前4个选上 3.环境配置 1)搜高级系统设置 2…...

基于服务器使用 apt 安装、配置 Nginx
🧾 一、查看可安装的 Nginx 版本 首先,你可以运行以下命令查看可用版本: apt-cache madison nginx-core输出示例: nginx-core | 1.18.0-6ubuntu14.6 | http://archive.ubuntu.com/ubuntu focal-updates/main amd64 Packages ng…...
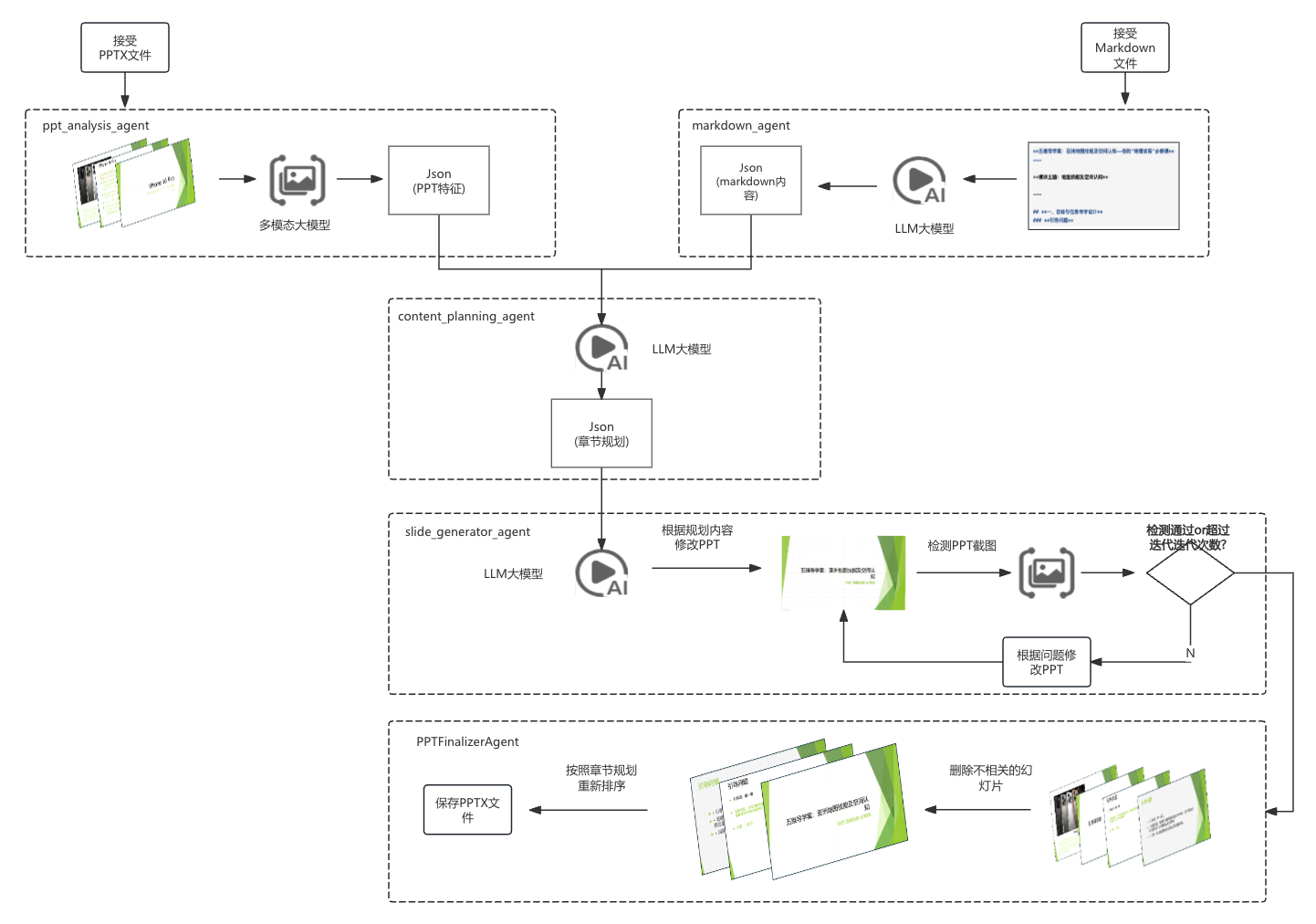
【项目实战】通过多模态+LangGraph实现PPT生成助手
PPT自动生成系统 基于LangGraph的PPT自动生成系统,可以将Markdown文档自动转换为PPT演示文稿。 功能特点 Markdown解析:自动解析Markdown文档结构PPT模板分析:分析PPT模板的布局和风格智能布局决策:匹配内容与合适的PPT布局自动…...
k8s业务程序联调工具-KtConnect
概述 原理 工具作用是建立了一个从本地到集群的单向VPN,根据VPN原理,打通两个内网必然需要借助一个公共中继节点,ktconnect工具巧妙的利用k8s原生的portforward能力,简化了建立连接的过程,apiserver间接起到了中继节…...
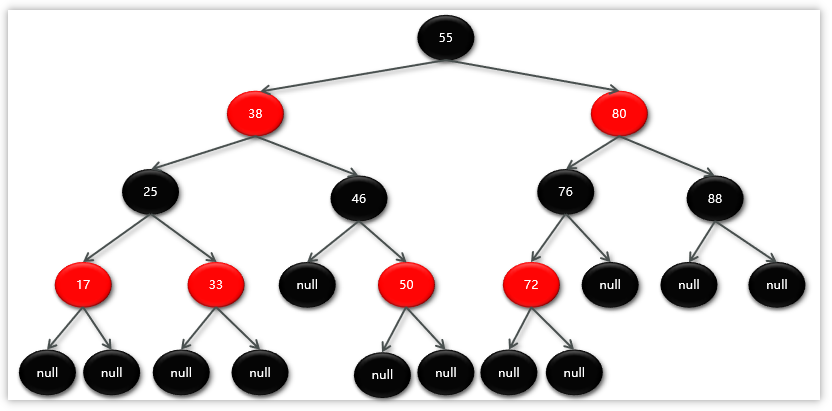
Map相关知识
数据结构 二叉树 二叉树,顾名思义,每个节点最多有两个“叉”,也就是两个子节点,分别是左子 节点和右子节点。不过,二叉树并不要求每个节点都有两个子节点,有的节点只 有左子节点,有的节点只有…...

Python ROS2【机器人中间件框架】 简介
销量过万TEEIS德国护膝夏天用薄款 优惠券冠生园 百花蜂蜜428g 挤压瓶纯蜂蜜巨奇严选 鞋子除臭剂360ml 多芬身体磨砂膏280g健70%-75%酒精消毒棉片湿巾1418cm 80片/袋3袋大包清洁食品用消毒 优惠券AIMORNY52朵红玫瑰永生香皂花同城配送非鲜花七夕情人节生日礼物送女友 热卖妙洁棉…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...
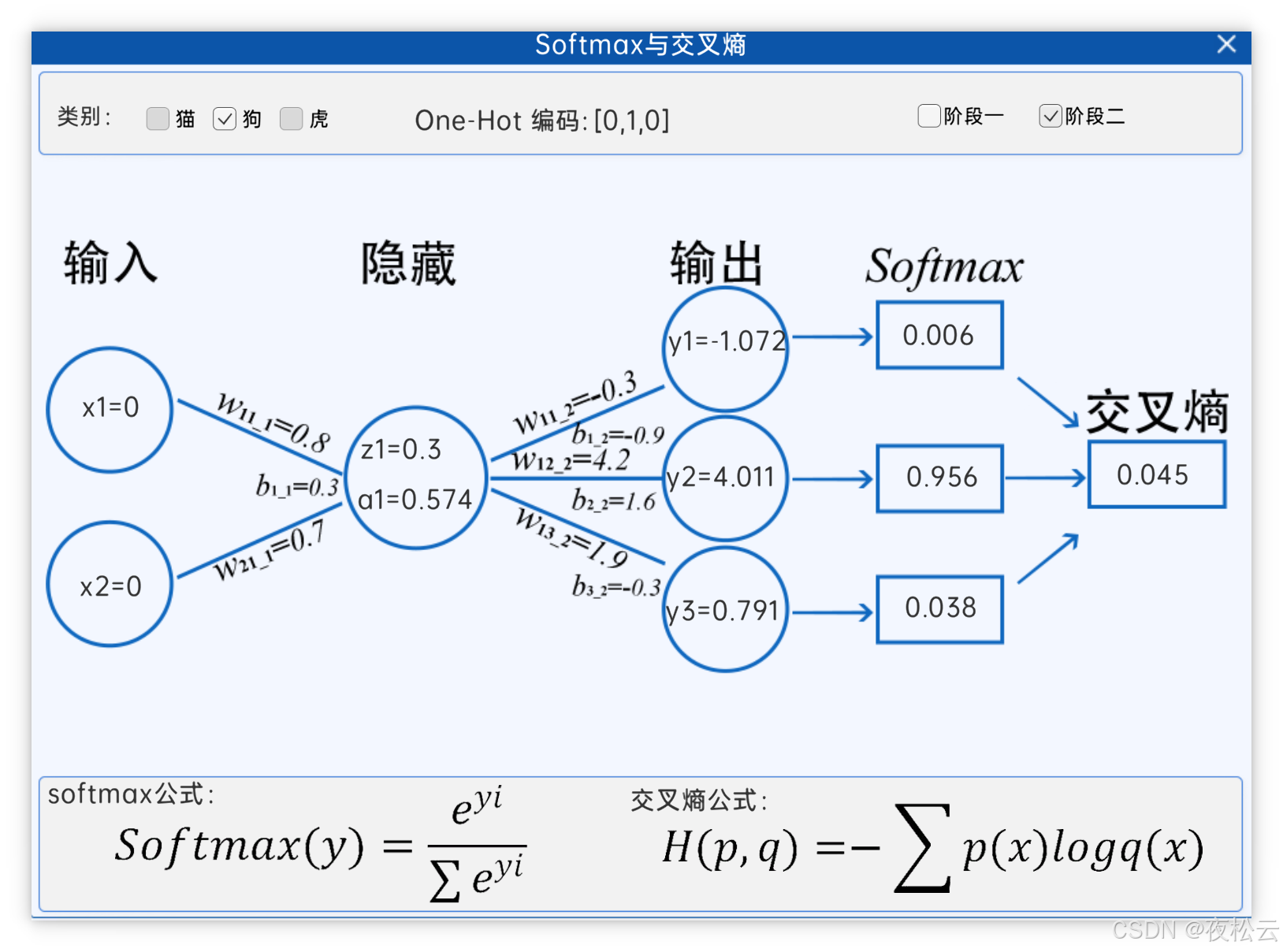
深入浅出深度学习基础:从感知机到全连接神经网络的核心原理与应用
文章目录 前言一、感知机 (Perceptron)1.1 基础介绍1.1.1 感知机是什么?1.1.2 感知机的工作原理 1.2 感知机的简单应用:基本逻辑门1.2.1 逻辑与 (Logic AND)1.2.2 逻辑或 (Logic OR)1.2.3 逻辑与非 (Logic NAND) 1.3 感知机的实现1.3.1 简单实现 (基于阈…...

虚拟电厂发展三大趋势:市场化、技术主导、车网互联
市场化:从政策驱动到多元盈利 政策全面赋能 2025年4月,国家发改委、能源局发布《关于加快推进虚拟电厂发展的指导意见》,首次明确虚拟电厂为“独立市场主体”,提出硬性目标:2027年全国调节能力≥2000万千瓦࿰…...