【SLAM】视觉SLAM简介
【SLAM】视觉SLAM简介
task04 主要了解了SLAM的主流框架,清楚VSALM中间接法与直接法的主要区别在什么地方,其各自的优势是什么,了解前端与后端的关系是什么
1.什么是SLAM
2.VSALM中间接法与直接法的主要区别在什么地方,其各自的优势是什么?
在SLAM(Simultaneous Localization and Mapping)中,中间接法(indirect methods)和直接法(direct methods)是两种不同的方法,用于估计机器或传感器的运动和构建环境地图。它们的主要区别在于如何处理传感器数据以估计位姿(位置和方向)和地图。
- 中间接法(Indirect Methods):
中间接法通过首先提取特征点或关键点(例如角点或边缘)来处理传感器数据。这些特征点通常代表环境中的显著性特征,如窗户、门、墙角等。然后,通过追踪这些特征点的运动,估计机器的位姿和地图。
优势:
- 稳定性高:特征点通常是稳定的,因此中间接法对于噪声和传感器误差具有一定的鲁棒性。
- 地图易于解释:生成的地图通常由特征点的位置表示,这使得地图更容易解释和可视化。
劣势:
- 依赖于特征提取:特征提取的性能可能受到环境变化、遮挡和光照条件的影响。
- 信息丢失:特征提取可能会导致信息的丢失,因为它仅关注环境中的一部分特征。
- 直接法(Direct Methods):
直接法直接使用传感器数据(例如,摄像头像素值或激光雷达测量)来估计机器的位姿和地图,而不需要首先提取特征点。它尝试优化像素值与模型投影之间的差异来进行位姿估计。
优势:
- 信息丰富:直接法利用了传感器数据的所有信息,因此在理论上可以提供更精确的位姿估计和地图构建。
- 不受特征提取限制:不需要提取特征点,因此对于复杂或光照变化大的环境更具鲁棒性。
劣势:
- 计算复杂度高:直接法通常需要更复杂的优化方法来处理大量像素数据,因此计算成本更高。
- 对噪声和误差敏感:由于直接法使用了原始传感器数据,对传感器噪声和误差更为敏感,可能需要更强大的滤波和优化技术。
选择中间接法或直接法取决于特定应用的需求和环境条件。中间接法通常在稳定的环境中表现良好,而直接法更适合需要利用所有传感器信息的情况。有时候也会将这两种方法结合使用,以充分利用它们各自的优势。
3.SLAM中前端与后端的关系是什么?
在SLAM(Simultaneous Localization and Mapping)中,前端(Front-End)和后端(Back-End)是两个关键组成部分,它们协同工作以实现定位和地图构建的任务。它们的关系可以理解为:
-
前端(Front-End):前端是负责传感器数据处理和特征提取的部分。它的主要任务是将来自传感器(例如摄像头、激光雷达、惯性测量单元等)的原始数据转化为可用于位姿估计和地图构建的信息。前端通常包括以下功能:
- 感知:前端处理传感器数据,例如图像或激光点云,以识别环境中的特征,如特征点、边缘或其他可用于定位和地图构建的信息。
- 特征提取:前端从感知到的数据中提取出显著性特征,这些特征通常用于位姿估计和地图构建。这可以是关键点、特征描述符等。
- 数据关联:前端负责将连续帧之间的特征或地图点进行关联,以跟踪它们的运动或更新地图。
-
后端(Back-End):后端是负责执行优化的部分,其主要任务是将前端提供的数据整合在一起,同时考虑传感器噪声和误差,以估计机器的位姿和构建地图。后端通常包括以下功能:
- 状态估计:后端使用传感器测量数据和前端提取的特征信息来估计机器的位姿(位置和方向)以及地图中的特征点位置。
- 数据关联和闭环检测:后端负责处理数据的关联,以建立不同时间步之间的关系,同时还可以检测和纠正由于循环(闭环)导致的误差,以提高估计的一致性。
- 优化:后端使用数学优化技术,如最小二乘法或非线性优化,来调整位姿和地图以最小化误差,从而提高SLAM系统的精度。
前端和后端之间的关系是紧密相互依赖的。前端提供了后端所需的关键信息,后端将这些信息整合在一起,并执行优化以生成一致的估计结果。这种协同工作使SLAM系统能够在未知环境中同时定位和构建地图。
相关文章:

【SLAM】视觉SLAM简介
【SLAM】视觉SLAM简介 task04 主要了解了SLAM的主流框架,清楚VSALM中间接法与直接法的主要区别在什么地方,其各自的优势是什么,了解前端与后端的关系是什么 1.什么是SLAM 2.VSALM中间接法与直接法的主要区别在什么地方,其各自的…...
Visual Studio2019报错
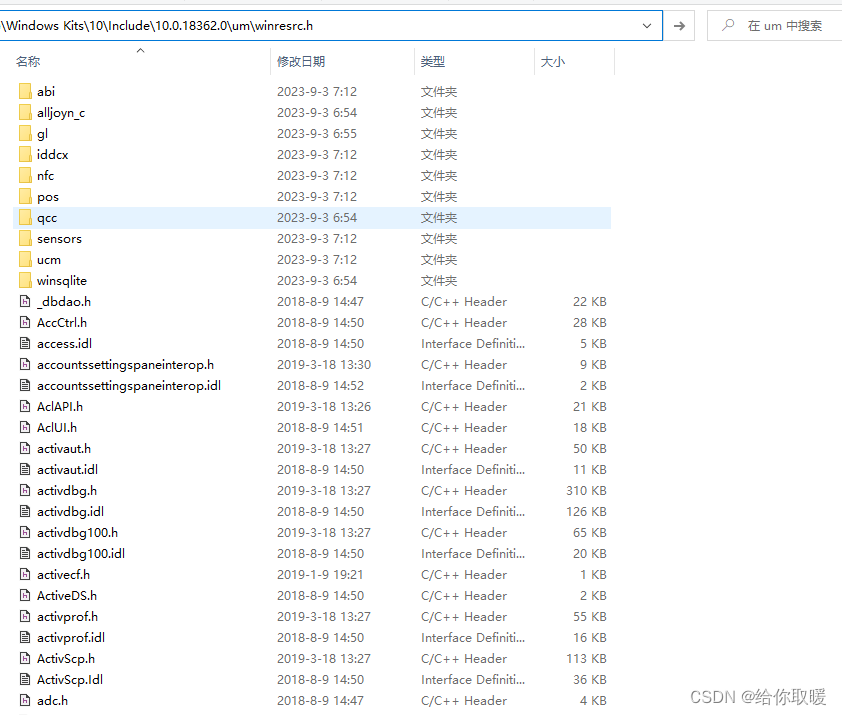
1- Visual Studio2019报错 错误 MSB8036 找不到 Windows SDK 版本 10.0.19041.0的解决方法 小伙伴们在更新到Visual Studio2019后编译项目时可能遇到过这个错误:“ 错误 MSB8036 找不到 Windows SDK 版本 10.0.19041.0的解决方法”,但是我们明明安装了该…...

ffplay源码解析-PacketQueue队列
包队列架构位置 对应结构体源码 MyAVPacketList typedef struct MyAVPacketList {AVPacket pkt; //解封装后的数据struct MyAVPacketList *next; //下一个节点int serial; //播放序列 } MyAVPacketList;PacketQueue typedef struct PacketQueue {MyAVPacketList …...

Flowable主要API介绍
1. ProcessEngine 负责与各个服务进行交互和管理流程的整个生命周期。 方法描述getName()close()startExecutors()启动所有流程引擎中的执行器。执行器用于处理流程实例的执行,在引擎启动时,执行器会自动运行并处理待办任务和定时任务。getRepositorySe…...

TensorFlow与pytorch特定版本虚拟环境的安装
TensorFlow与Python的版本对应,注意,一定要选择对应的版本,否则会让你非常痛苦,折腾很久搞不清楚原因。 建议使用国内镜像源安装 没有GPU后缀的就表示是CPU版本的,不加版本就是最新 pip install tensorflow -i https:…...

【SpringMVC】拦截器JSR303的使用
【SpringMVC】拦截器&JSR303的使用 1.1 什么是JSR3031.2 为什么使用JSR3031.3 常用注解1.4 Validated与Valid区别1.5 JSR快速入门1.5.2 配置校验规则# 1.5.3 入门案例二、拦截器2.1 什么是拦截器2.2 拦截器与过滤器2.3 应用场景2.4 拦截器快速入门2.5.拦截器链2.6登录案列权…...

Java - LambdaQueryWrapper 的常用方法
1、查看项目中是否导入mybatisPlus的jar包 2、servie 层和实现类要集成mybatisPlus service 继承IService<> 实现类中要继承IService的实现类ServiceImpl<mapper,实体类> 3、如果想要mapper中的一些方法,mapper 要继承BaseMapper<实体类> 4、在实…...

Selenium常见问题解析
1、元素定位失败: 在使用Selenium自动化测试时,最常见的问题之一是无法正确地定位元素,这可能导致后续操作失败。解决方法包括使用不同的定位方式(如xpath、CSS selector、id等),等待页面加载完全后再进行…...
【npm】npm私有库的使用-绑定
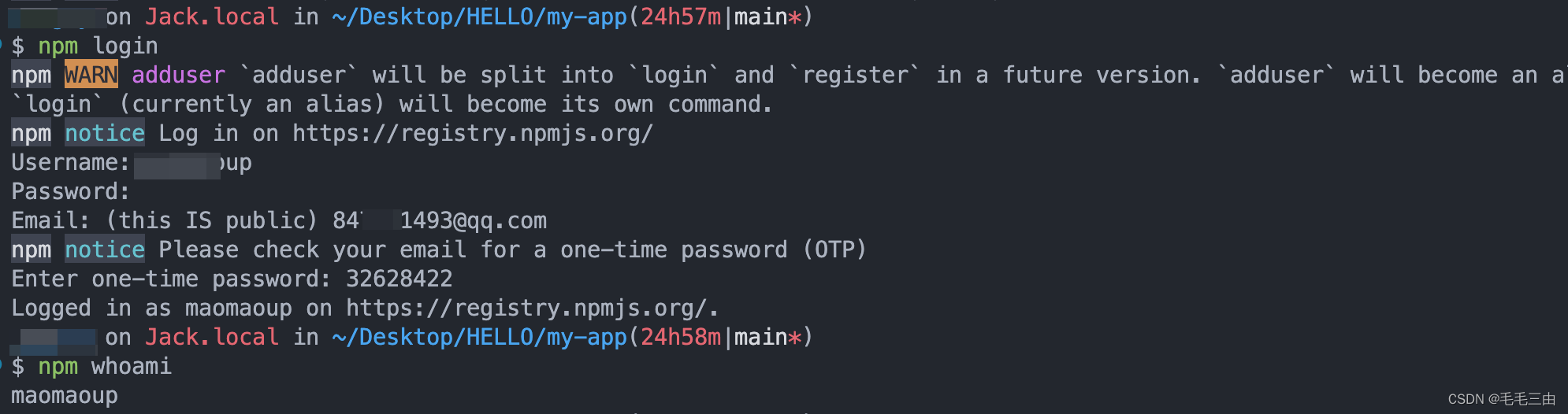
注册npm账户 输入基本信息 验证 收一次性验证码 登录 本地绑定 全局绑定了其他的私有库 若要在专门发包的项目中,发包到自己的私有库,需要在项目文件夹中创建一个.npmrc文件 创建文件 可以直接在项目目录下输入touch .npmrc创建文件 文件内容 regi…...

spring seccurity OAuth 2.0授权服务器工作流程
一、客户端配置:在configure(ClientDetailsServiceConfigurer clients)方法中,配置了一个客户端,包括客户端标识符、客户端秘密、授权类型、授权范围和令牌有效期等信息。这个客户端表示某个应用程序或服务,它将向授权服务器请求访…...

【Tensorflow 2.12 电影推荐系统之排序模型】
Tensorflow 2.12 电影推荐系统之排序模型 学习笔记导入相关模块准备数据加载数据数据预处理获取词汇表构建模型定义评分排序模型定义损失函数以及模型评估指标定义完整的评分排序模型训练和评估创建排序模型实例缓存数据训练评估预测导出和加载模型结尾学习笔记 Tensorflow 2.1…...

ROS2-IRON Ubuntu-22.0 源码下载失败解决方法 vcs import --input
ROS2 一.ROS2 IRON环境搭建1.设置系统字符集为UTF-82.将RO2 apt 库添加到系统中3.添加ROS2 GPG key4.添加ROS 2 的软件源安装开发工具 二.下载ROS2sh源代码编译 一.ROS2 IRON环境搭建 虚拟机系统:Ubuntu22.04 虚拟机:VMware-player-full-16.2.5-2090451…...

百度SEO优化技巧大揭秘(百度SEO优化策略,提升网站排名)
百度SEO优化策略介绍 作为全球最大的中文搜索引擎,百度的优化是各大网站的重中之重。首先,网站内容是关键,要确保内容原创、有价值、符合用户需求。其次,合理设置页面标题、关键词、描述等元素。还要注意网站结构,合理…...
JavaScript:二进制数组【笔记】
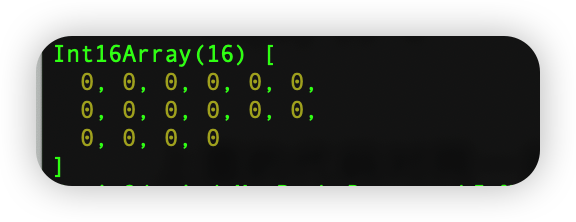
二进制数组【ArrayBuffer对象、Type的Array视图和DataView视图】JavaScript操作二进制数据的一个接口。 这些接口原本是和WebGL有关【WebGL是浏览器与显卡之间的通信接口】,为了满足JavaScript与显卡之间大量、实时数据交换,那么JavaScript和显卡之间的…...

华为云认证考试包含哪些内容?
华为云计算认证考试包含哪些内容?华为云计算认证涵盖了hcia、HCIP、HCIE三个级别的认证。HCIA云计算方向只要考一门笔试,考试覆盖基础通识知识、虚拟化FusionCompute、桌面云FusionAccess、云计算发展趋势共四大模块知识点,包括云计算概述、服…...
进程程序替换
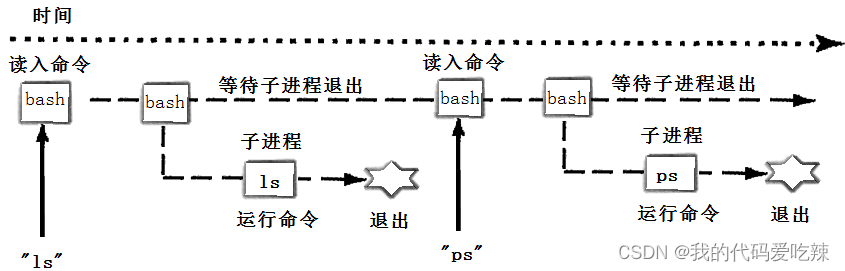
✅<1>主页::我的代码爱吃辣 📃<2>知识讲解:Linux——进程替换 ☂️<3>开发环境:Centos7 💬<4>前言:我们创建子进程的目的是什么?想让子进程帮我们执行特定的…...
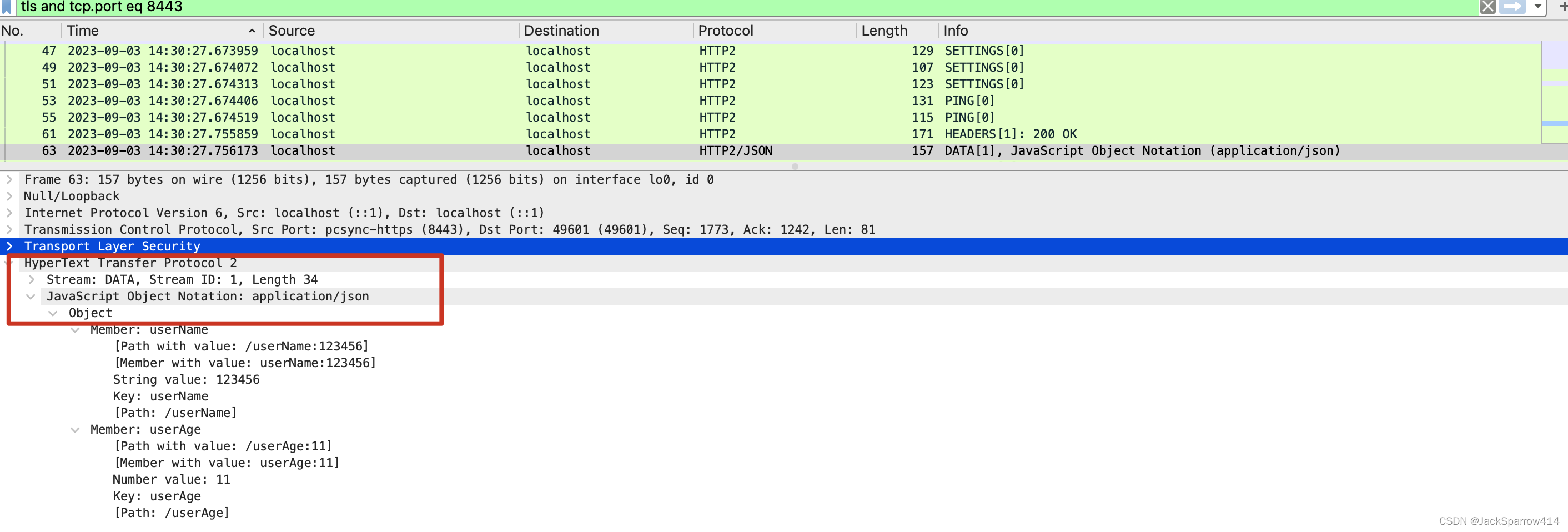
理解HTTPS/TLS/SSL(二)可视化TLS握手过程并解密加密数据
文章目录 WireShark抓包TLS握手过程Client HelloServer HelloEncryped Extenstions, Certificate, Certificate VerifyChange Ciper Spec, FinshedTLS 1.2和TLS 1.3的区别能不能在进一步? 解密WireShark中抓到的TLS包参考资料 上一篇文章已经在本地使用了生成自签名…...

一文详解TCP三次握手四次挥手
文章目录 TCP的三次握手和四次挥手三次握手四次挥手 TCP的三次握手和四次挥手 基本概念 SYN(Synchronize Sequence Numbers,同步序列数字):用于建立连接的同步信号。 SYN 序列号的作用是用于标识每个数据包中的字节流的起始位置。…...
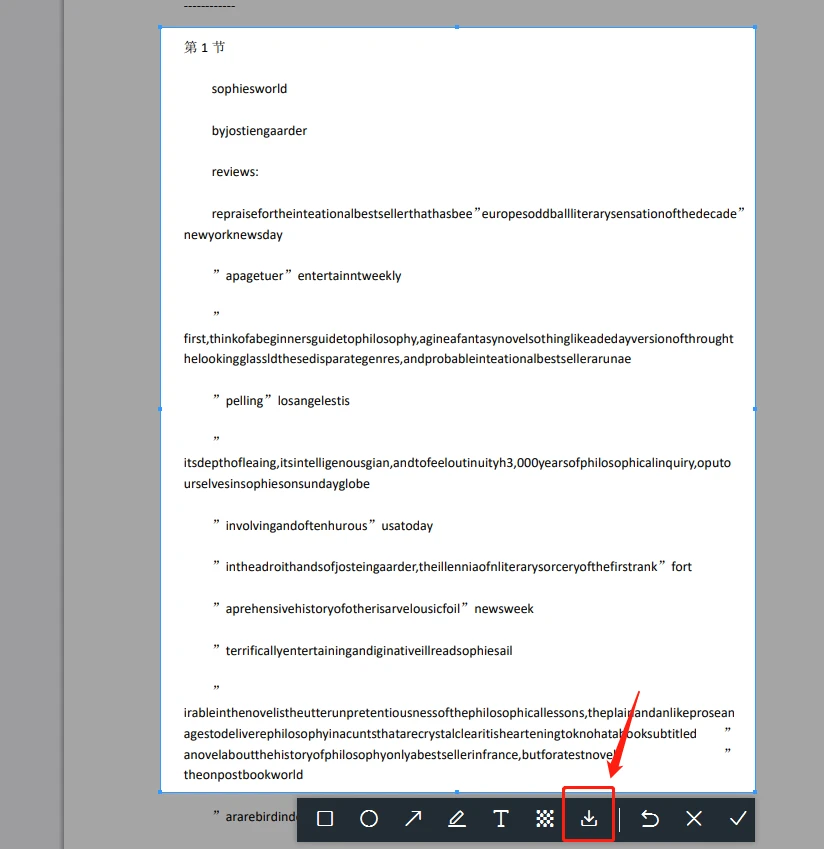
PDF怎么转图片?四种转换方法分享
PDF文件是一种非常常见的文档格式,然而,有时候我们需要将PDF文件转换成图片格式。比如我们可能需要将PDF文件中的某些页面或图表转换成图片格式以便于编辑或分享。在这篇文章中,我们将介绍四种将PDF文件转换成图片的方法。 方法一:…...

华为OD机试 - 压缩报文还原 - 正则表达式(Java 2023 B卷 100分)
目录 专栏导读一、题目描述二、输入描述三、输出描述四、解题思路五、Java算法源码六、效果展示1、输入2、输出3、说明 华为OD机试 2023B卷题库疯狂收录中,刷题点这里 专栏导读 本专栏收录于《华为OD机试(JAVA)真题(A卷B卷&#…...
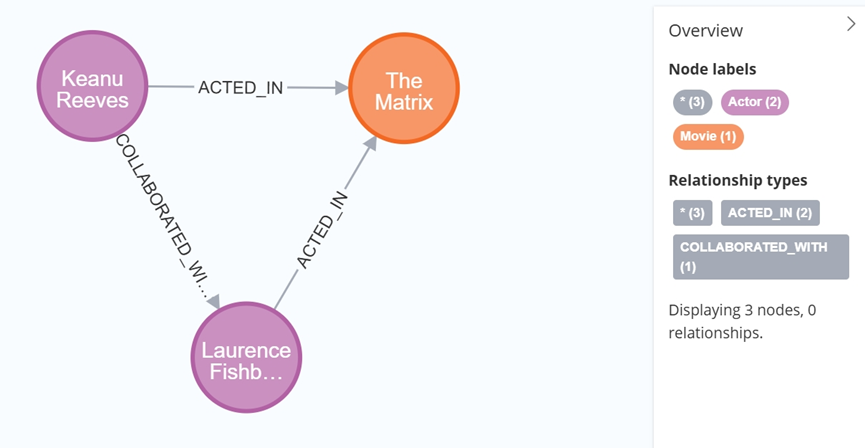
大数据学习栈记——Neo4j的安装与使用
本文介绍图数据库Neofj的安装与使用,操作系统:Ubuntu24.04,Neofj版本:2025.04.0。 Apt安装 Neofj可以进行官网安装:Neo4j Deployment Center - Graph Database & Analytics 我这里安装是添加软件源的方法 最新版…...
微信小程序之bind和catch
这两个呢,都是绑定事件用的,具体使用有些小区别。 官方文档: 事件冒泡处理不同 bind:绑定的事件会向上冒泡,即触发当前组件的事件后,还会继续触发父组件的相同事件。例如,有一个子视图绑定了b…...
docker详细操作--未完待续
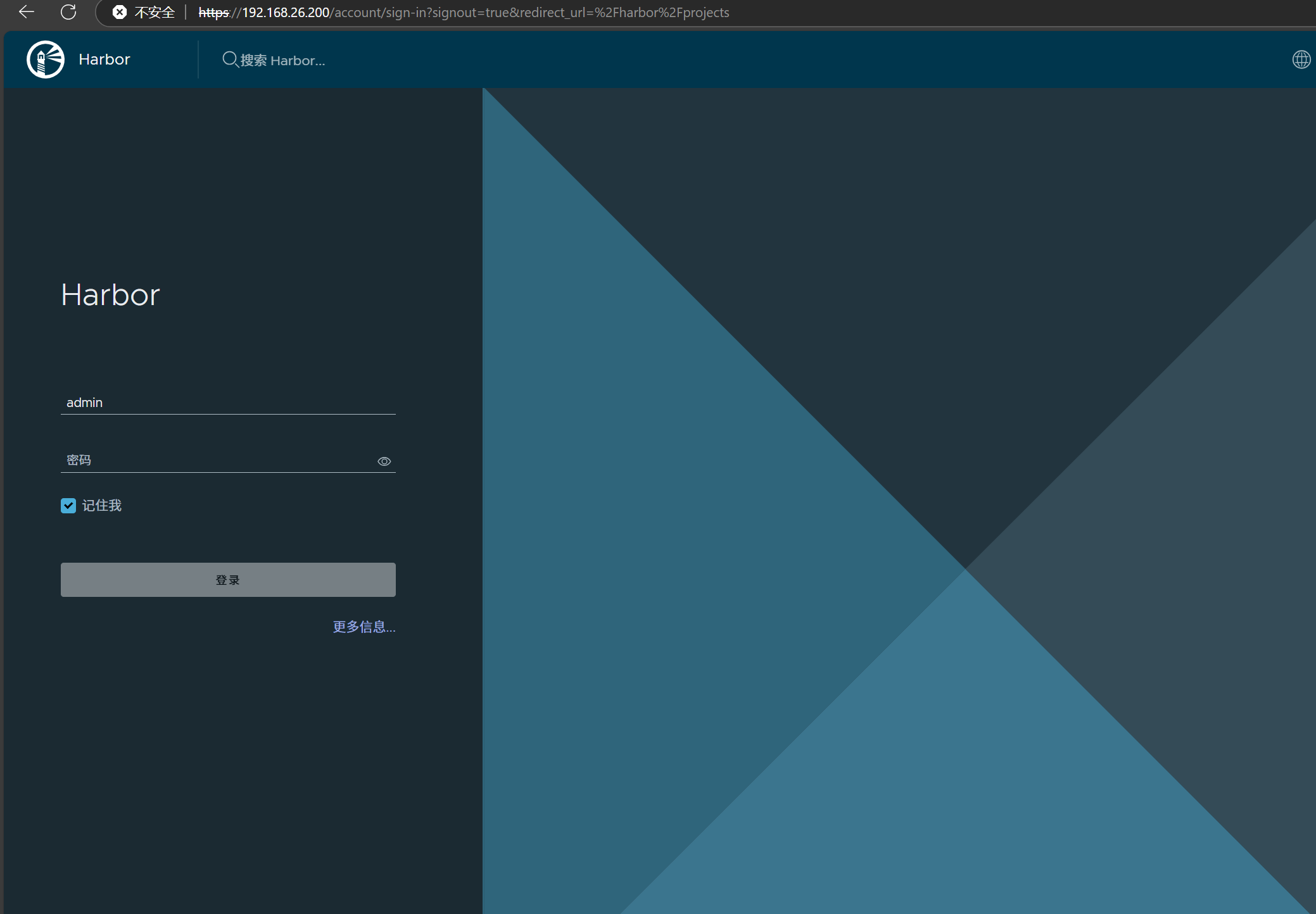
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...

Leetcode 3576. Transform Array to All Equal Elements
Leetcode 3576. Transform Array to All Equal Elements 1. 解题思路2. 代码实现 题目链接:3576. Transform Array to All Equal Elements 1. 解题思路 这一题思路上就是分别考察一下是否能将其转化为全1或者全-1数组即可。 至于每一种情况是否可以达到…...
)
React Native 导航系统实战(React Navigation)
导航系统实战(React Navigation) React Navigation 是 React Native 应用中最常用的导航库之一,它提供了多种导航模式,如堆栈导航(Stack Navigator)、标签导航(Tab Navigator)和抽屉…...

使用van-uploader 的UI组件,结合vue2如何实现图片上传组件的封装
以下是基于 vant-ui(适配 Vue2 版本 )实现截图中照片上传预览、删除功能,并封装成可复用组件的完整代码,包含样式和逻辑实现,可直接在 Vue2 项目中使用: 1. 封装的图片上传组件 ImageUploader.vue <te…...
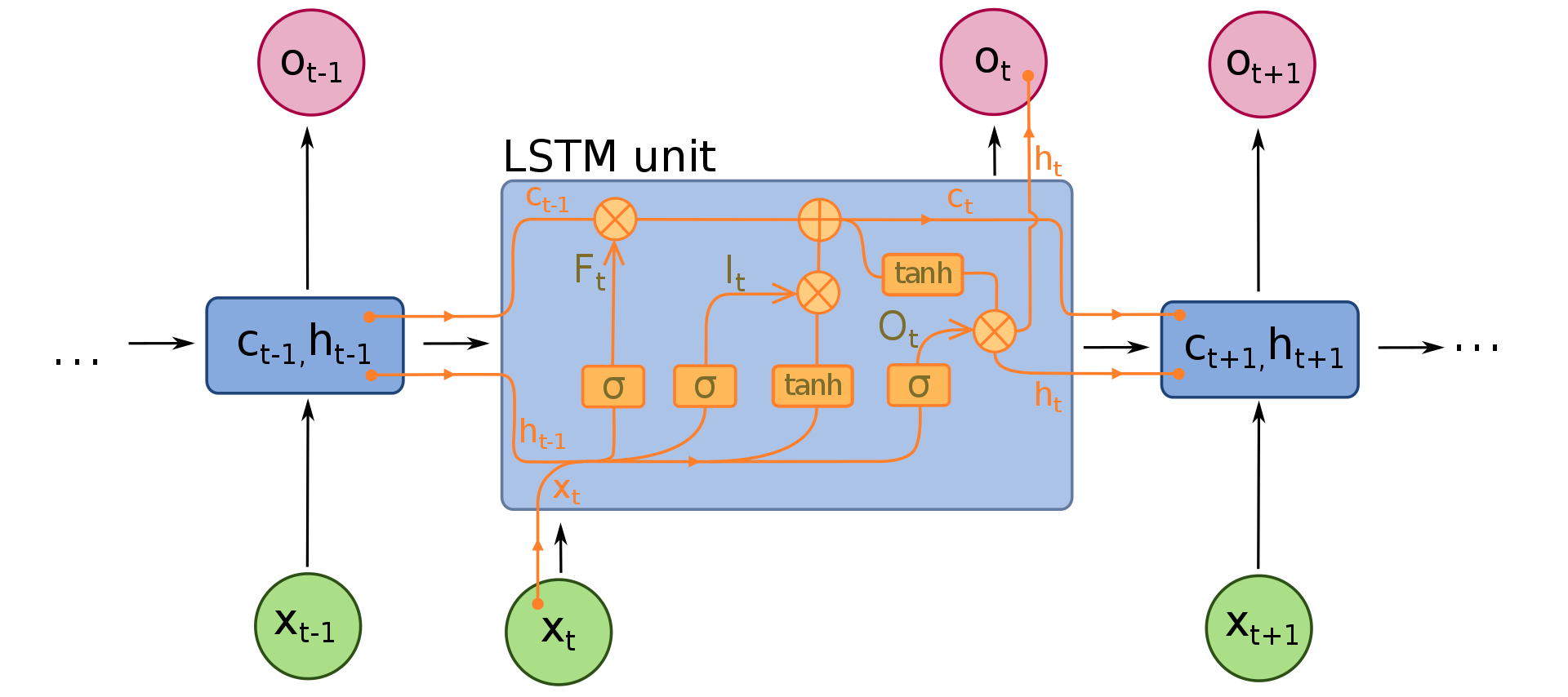
NLP学习路线图(二十三):长短期记忆网络(LSTM)
在自然语言处理(NLP)领域,我们时刻面临着处理序列数据的核心挑战。无论是理解句子的结构、分析文本的情感,还是实现语言的翻译,都需要模型能够捕捉词语之间依时序产生的复杂依赖关系。传统的神经网络结构在处理这种序列依赖时显得力不从心,而循环神经网络(RNN) 曾被视为…...
)
【HarmonyOS 5 开发速记】如何获取用户信息(头像/昵称/手机号)
1.获取 authorizationCode: 2.利用 authorizationCode 获取 accessToken:文档中心 3.获取手机:文档中心 4.获取昵称头像:文档中心 首先创建 request 若要获取手机号,scope必填 phone,permissions 必填 …...

重启Eureka集群中的节点,对已经注册的服务有什么影响
先看答案,如果正确地操作,重启Eureka集群中的节点,对已经注册的服务影响非常小,甚至可以做到无感知。 但如果操作不当,可能会引发短暂的服务发现问题。 下面我们从Eureka的核心工作原理来详细分析这个问题。 Eureka的…...
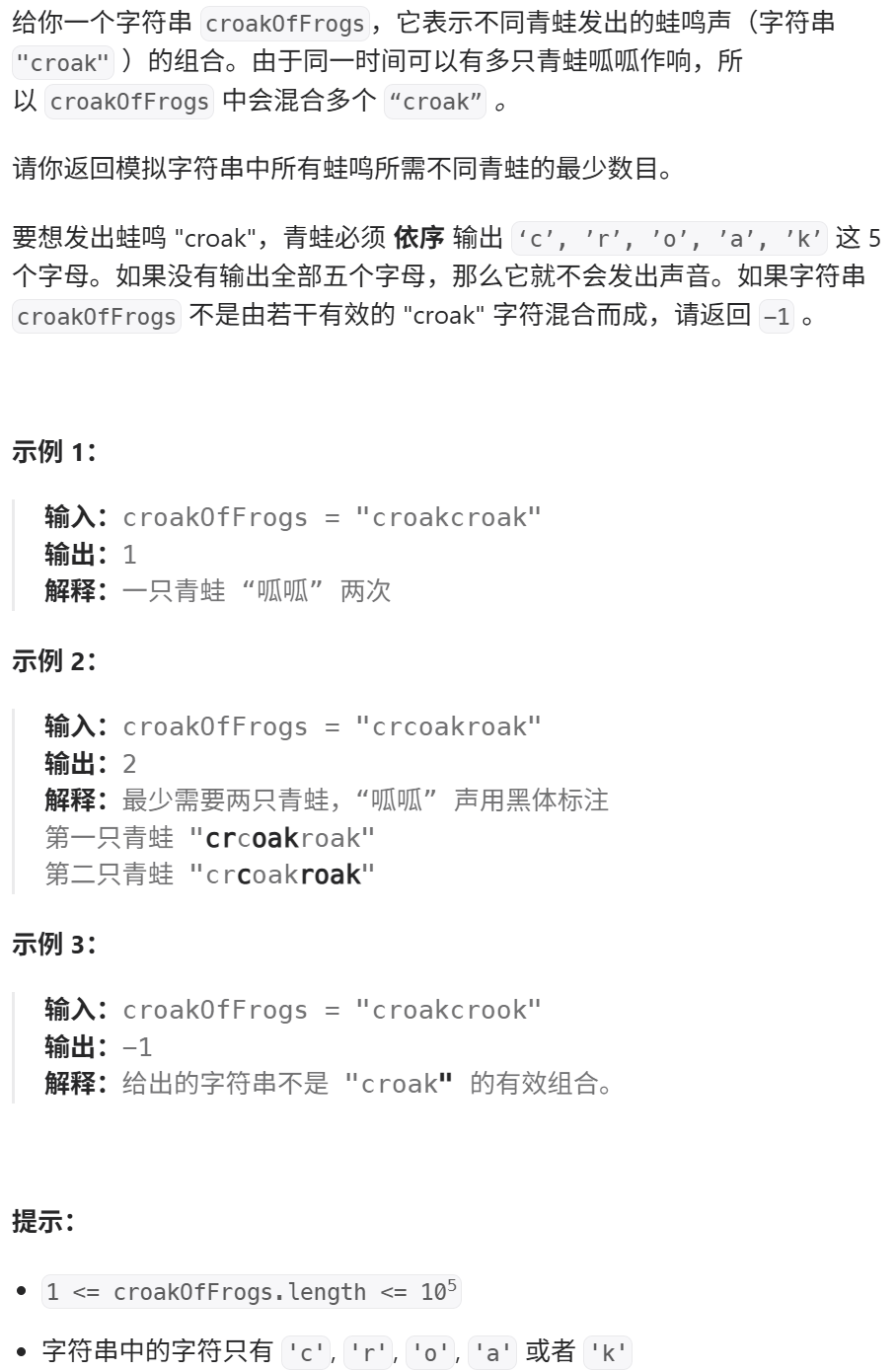
算法:模拟
1.替换所有的问号 1576. 替换所有的问号 - 力扣(LeetCode) 遍历字符串:通过外层循环逐一检查每个字符。遇到 ? 时处理: 内层循环遍历小写字母(a 到 z)。对每个字母检查是否满足: 与…...