【新版】系统架构设计师 - 未来信息综合技术

个人总结,仅供参考,欢迎加好友一起讨论
文章目录
- 架构 - 未来信息综合技术
- 考点摘要
- 信息物理系统
- CPS的体系架构
- CPS 的技术体系
- CPS应用场景
- 人工智能
- 分类
- 关键技术
- 机器学习
- 机器人
- 发展
- 分类
- 机器人4.0
- 边缘计算
- 概念与特点
- 边云协同
- 安全
- 应用场景
- 数字孪生
- 关键技术
- 应用
架构 - 未来信息综合技术
考点摘要
- 信息物理系统(★)
- 人工智能(★★)
- 机器人(★★)
- 边缘计算(★★)
- 数字孪生(★★)
- 云计算与大数据(★★)
第二版架构新教材里新增加内容,对应第11章,考查内容也会非常发散,会迎合当前前沿技术。
信息物理系统
信息物理系统(Cyber-Physical Systems,CPS)统是控制系统、嵌入式系统的扩展与延伸。
定义
通过集成先进的感知、计算、通信、控制等信息技术和自动控制技术,构建了物理空间与信息空间中人、机、物、环境、信息等要素相互映射、适时交互、高效协同的复杂系统,实现系统内资源配置和运行的按需响应、快速迭代、动态优化。
本质
构建一套信息空间与物理空间之间基于数据自动流动的状态感知、实时分析、科学决策、精准执行的闭环赋能体系,解决生产制造、应用服务过程中的复杂性和不确定性问题,提高资源配置效率,实现资源优化。
CPS的体系架构
- 单元级CPS。是具有不可分割性的CPS最小单元,具备可感知、可计算、可交互、可延展、自决策功能的CPS最小单元,一个智能部件、一个工业机器人或一个智能机床都可能是一个CPS最小单元。
- 系统级CPS。多个最小单元(单元级)通过工业网络(如工业现场总线、工业以太网等),实现更大范围、更宽领域的数据自动流动,实现了多个单元级CPS的互联、互通和互操作,进一步提高制造资源优化配置的广度、深度和精度。包含互联互通、即插即用、边缘网关、数据互操作、协同控制、监视与诊断等功能。其中互连互通、边缘网关和数据互操作主要实现单元级CPS的异构集成;即插即用主要在系统级CPS实现组件管理,包括组(单元级CPS)的识别,配置,更新和删除等功能;协同控制是指对多个单元级CPS的联动和协同控制等;监视与诊断主要是对单元级CPS的状态实时监控和诊断其是否具备应有的能力。
- SoS级。多个系统级CPS的有机组合构成SoS级的CPS。例如,多个工序(系统的CPS)形成一个车间级的CPS或者形成整个工厂的CPS。主要实现数据的汇聚,从而对内进行资产的优化和对外形成运营优化服务。其主要功能包括:数据存储、数据融合、分布式计算、大数据分析、数据服务,并在数据服务的基础上形成了资产性能管理和运营优化服务。
CPS 的技术体系
- CPS技术体系主要分为CPS总体技术、CPS支撑技术、CPS核心技术。
- CPS总体技术主要包括系统架构、异构系统集成、安全技术、试验验证技术等,是CPS的顶层设计技术。
- CPS支撑技术主要包括智能感知、嵌入式软件、数据库、人机交互、中间件、SDN(软件定义网络)、物联网、大数据等,是基于CPS应用的支撑。
- CPS核心技术主要包括虚实融合控制、智能装备、MBD、数字孪生技术、现场总线、工业以太网、CAX\MES\ERP\PLM\CRM\SCM等,是CPS的基础技术。
根据上述技术体系可以分为四大核心技术要素:
- 一硬,感知和自动控制,是CPS实现的硬件支撑
- 一软,工业软件,固化了CPS计算和数据流程的规则,是CPS的核心
- 一网,工业网络,是互联互通和数据传输的网络载体
- 一平台,工业云和智能服务平台,是CPS数据汇聚和支撑上层解决方案的基础,对外提供资源管控和能力服务
CPS应用场景
- 智能设计。在产品及工艺设计、工厂设计过程中的大部分工作都可以在虚拟空间中进行仿真,并实现迭代和改进。包括产品及工艺设计、生产线/工厂设计。
- 智能生产。CPS可以打破生产过程的信息孤岛现象,实现设备的互联互通,实现生产过程监控,合理管理和调度各种生产资源,优化生产计划,达到资源和制造协同,实现“制造”到“智造”的升级。包块设备管理、生产管理、柔性制造。
- 智能服务。通过CPS按照需要形成本地与远程云服务相互协作、个体与群体、群体与系统的相互协同一体化工业云服务体系,能够更好地服务于生产,解决装备运行日益复杂、使用难度日益增大的困扰,实现智能装备的协同优化,支持企业用户经济性、安全性和高效性经营目标落地。包括健康管理、智能维护、远程征兆性诊断、协同优化、共享服务。
- 智能应用。将设计者、生产者和使用者的单调角色转变为新价值创造的参与者,并通过新型价值链的创建反馈到产业链的转型,从根本上调动各个参与者的积极性,实现制造业转型。包括无人装备、产业链互动、价值链共赢。
CPS建设路径:CPS体系设计、单元级CPS建设、系统级CPS建设和SoS级CPS建设阶段。
人工智能
概念
利用数字计算机或者数字计算机控制的机器模拟、延伸和扩展人的智能,感知环境、获取知识并使用知识获得最佳结果的理论、方法、技术及应用系统。
目标
了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器。该领域的研究包括机器人、自然语言处理、计算机视觉和专家系统等。
分类
根据人工智能是否能真正实现推理、思考和解决问题,可以将人工智能分为弱人工智能和强人工智能。
弱人工智能
不能推理和解决问题的智能机器,无自主意识
现阶段主流研究
主要在语音识别、图像处理和物体分割、机器翻译等
强人工智能
能思维的智能机器,有知觉的和自我意识
现阶段鲜有进展
类人(思考和推理类似人的思维)/非类人(不同与人类的知觉、意识和推理方式)
关键技术
-
自然语言处理(NLP)
研究实现人与计算机之间用自然语言进行有效通信的各种理论和方法。主要包括机器翻译(从一种自然语言到另外一种自然语言的翻译)、语义理解(利用计算机理解文本篇章内容,并回答相关问题)和问答系统(让计算机像人类一样用自然语言与人交流)等。
-
计算机视觉
使用计算机模仿人类视觉系统的科学,让计算机拥有类似人类提取、处理、理解和分析图像以及图像序列的能力,将图像分析任务分解为便于管理的小块任务。
-
知识图谱
把所有不同种类的信息连接在一起而得到的一个关系网络,提供了从“关系”的角度去分析问题的能力。一般用于反欺诈、不一致性验证等问题。
-
人机交互(HCI)
主要研究人和计算机之间的信息交换。
-
虚拟现实或增强现实(VR/AR)
以计算机为核心的新型视听技术。结合相关科学技术,在一定范围内生成与真实环境在视觉、听觉等方面高度近似的数字化环境。
-
机器学习(ML)
以数据为基础,通过研究样本数据寻找规律,并根据所得规律对未来数据进行预测。目前,机器学习广泛应用于数据挖掘、计算机视觉、自然语言处理、生物特征识别等领域。
机器学习
研究计算机怎么模拟或实现人类的学习行为以获取新的知识或技能的学科,使计算机重新组织己有的组织结构并不断改善自身的性能。
按照学习模式的不同,机器学习可分为监督学习、无监督学习、半监督学习、强化学习。其中,监督学习需要提供标注的样本集,无监督学习不需要提供标注的样本集,半监督学习需要提供少量标注的样本,而强化学习需要反馈机制。
-
监督学习
利用己标记的有限训练数据集,通过某种学习策略/方法建立一个模型,从而实现对新数据/实例的标记(分类)/映射。在自然语言处理、信息检索、文本挖掘、于写体辨识、垃圾邮件侦测等领域获得了广泛应用。
-
无监督学习
利用无标记的有限数据描述隐藏在未标记数据中的结构/规律。无监督学习不需要以人工标注数据作为训练样本,这样不仅便于压缩数据存储、减少计算量、提升算法速度,还可以避免正负样本偏移引起的分类错误问题。无监督学习主要用于经济预测、异常检测、数据挖掘、图像处理、模式识别等领域。
-
半监督学习
利用少量的标注样本和大量的未标识样本进行训练和分类,从而达到减少标注代价、提高学习能力的目的。半监督学习的算法首先试图对未标识数据进行建模,在此基础上冉对标识的数据进行预测。例如,图论推理算法或者拉普拉斯支持向量机等。
-
强化学习
可以学习从环境状态到行为的映射,使得智能体选择的行为能够获得环境的最大奖赏,最终目标是使外部环境对学习系统在某种意义下的评价最佳。在机器人控制、无人驾驶、工业控制等领域获得成功应用。
按照学习方法的不同,机器学习可分为传统机器学习和深度学习。区别在于,传统机器学习的领域特征需要手动完成,且需要大量领域专业知识;深度学习不需要人工特征提取,但需要大量的训练数据集以及强大的GPU服务器来提供算力。
-
传统机器学习
从一些观测(训练)样本出发,试图发现不能通过原理分析获得的规律,实现对未来数据行为或趋势的准确预测。在自然语言处理、语音识别、图像识别、信息检索等许多计算机领域获得了广泛应用。
-
深度学习
一种基于多层神经网络并以海量数据作为输入规则的自学习方法,依靠提供给它的大量实际行为数据(训练数据集),进行参数和规则调整。深度学习更注重特征学习的重要性。
机器学习的常见算法还包括迁移学习、主动学习和演化学习。
-
迁移学习
指当在某些领域无法取得足够多的数据进行模型训练时,利用另一领域数据获得的关系进行的学习。主要在变量有限的小规模应用中使用,如基于传感器网络的定位、文字分类和图像分类等。
-
主动学习
通过一定的算法查询最有用的未标记样本,并交由专家进行标记,然后用查询到的样本训练分类模型来提高模型的精度。
-
演化学习
基于演化算法提供的优化工具设计机器学习算法,针对机器学习任务中存在大量的复杂优化问题,应用于分类、聚类、规则发现、特征选择等机器学习与数据挖掘问题中。算法通常维护一个解的集合,并通过启发式算子来从现有的解产生新解,并通过挑选更好的解进入下一次循环,不断提高解的质量。
机器人
发展
-
第一代机器人:示教再现型机器人
重复地根据人当时示教的结果,再现出动作。例如:汽车的点焊机器人
-
第二代机器人:感觉型机器人
拥有类似人在某种功能的感觉,能够通过感觉来感受和识别。例如:扫地机器人
-
第三代机器人:智能型机器人
可进行复杂逻辑推理、判断及决策,在变化的内部状态与外部环境中自主决定自身行为。例如:火星机器人,大狗机器人
分类
按照控制方式:
-
操作机器人
操作机器人的典型代表是在核电站处理放射性物质时远距离进行操作的机器人。
-
程序机器人
程序机器人可以按预先给定的程序、条件、位置进行作业。
-
示教再现机器人
示教再现机器人与盒式磁带的录放相似,机器人可以将所教的操作过程自动地记录在磁盘、磁带等存储器中,当需要再现操作时,可重复所教过的动作过程。示教方法有直接示教与遥控示教两种。
-
智能机器人
智能机器人既可以进行预先设定的动作,还可以按照工作环境的改变而变换动作。
-
综合机器人
综合机器人是由操纵机器人、示教再现机器人、智能机器人组合而成的机器人,如火星机器人。
按照应用行业:
-
工业机器人
工业机器人包括搬运、焊接、装配、喷漆、检查等机器人,主要应用于现代化的工厂和柔性加工系统中。
-
服务机器人
比如娱乐机器人包括弹奏乐器的机器人、舞蹈机器人、玩具机器人等(具有某种程度的通用性),也包括根据环境而改变动作的机器人。
-
特殊领域机器人
主要包括建筑、农业等机器人,主要应用于人们难以进入的核电站、海底、宇宙空间等场合。
机器人4.0
把云端大脑分布在各个地方,充分利用边缘计算的优势,提供高性价比的服务,把要完成任务的记忆场景的知识和常识很好地组合起来,实现规模化部署。特别强调机器人除了具有感知能力实现智能协作,还应该具有一定的理解和决策能力,进行更加自主的服务。
机器人4.0的核心技术:
-
云-边-端的无缝协同计算
云-边-端一体的机器人系统是面向大规模机器人的服务平台,信息处理和生成主要在云-边-端上分布处理完成。通常情况下,云侧可以提供高性能的计算和知识存储,边缘侧用来进一步处理数据并实现协同和共享。机器人端只用完成实时操作的功能。
-
持续学习与协同学习
希望机器人可以通过少量数据来建立基本的识别能力,然后可以自主地去找到更多的相关数据并进行自动标注。然后用这些自主得到的数据来对自己已有的模型进行重新训练来提高性能。
-
知识图谱
需要更加动态和个性化的知识;需要和机器人的感知与决策能力相结合。
-
场景自适应
主动观察场景内人和物之间的变化,预测可能发生的事件,从而影响之后的行动模式。这个技术的关键问题在于场景预测能力。就是机器人通过对场景内的各种人和物进行细致的观察,结合相关的知识和模型进行分析,并预测之后事件即将发生的时间,改变自己的行为模式。
-
数据安全
既要保证端到端的安全传输,也要保障服务器端的安全存储。
边缘计算
概念与特点
边缘计算将数据的处理、应用程序的运行甚至一些功能服务的实现,由网络中心下放到网络边缘的节点上。在网络边缘侧的智能网关上就近采集并且处理数据,不需要将大量未处理的原生数据上传到远处的大数据平台。
采用边缘计算的方式,海量数据能够就近处理,大量的设备也能实现高效协同的工作,诸多问题迎刃而解。因此,边缘计算理论上可满足许多行业在敏捷性、实时性、数据优化、应用智能,以及安全与隐私保护等方面的关键需求。
边缘计算的业务本质是云计算在数据中心之外汇聚节点的延伸和演进,主要包括云边缘、边缘云和云化网关三类落地形态;以“边云协同”和“边缘智能”为核心能力发展方向;软件平台需要考虑导入云理念、云架构、云技术,提供端到端实时、协同式智能、可信赖、可动态重置等能力;硬件平台需要考虑异构计算能力。
- 云边缘:是云服务在边缘侧的延伸,逻辑上仍是云服务,主要的能力提供依赖于云服务或需要与云服务紧密协同。
- 边缘云:是在边缘侧构建中小规模云服务能力,边缘服务能力主要由边缘云提供。
- 云化网关:以云化技术与能力重构原有嵌入式网关系统,云化网关在边缘侧提供协议/接口转换、边缘计算等能力,部署在云侧的控制器提供边缘节点的资源调度、应用管理与业务编排等能力。
边缘计算具有以下特点:
- 联接性:联接性是边缘计算的基础。所联接物理对象的多样性及应用场景的多样性,需要边缘计算具备丰富的联接功能。
- 数据第一入口:边缘计算作为物理世界到数字世界的桥梁,是数据的第一入口,拥有大量、实时、完整的数据,可基于数据全生命周期进行管理与价值创造,将更好的支撑预测性维护、资产效率与管理等创新应用。
- 约束性:边缘计算产品需适配工业现场相对恶劣的工作条件与运行环境,如防电磁、防尘、防爆、抗振动、抗电流/电压波动等。在工业互联场景下,对边缘计算设备的功耗、成本、空间也有较高的要求。
- 分布性:边缘计算实际部署天然具备分布式特征。这要求边缘计算支持分布式计算与存储、实现分布式资源的动态调度与统一管理、支撑分布式智能、具备分布式安全等能力。
边云协同
边缘计算与云计算各有所长,云计算擅长全局性、非实时、长周期的大数据处理与分析,能够在长周期维护、业务决策支撑等领域发挥优势;边缘计算更适用局部性、实时、短周期数据的处理与分析,能更好地支撑本地业务的实时智能化决策与执行。
边缘计算既靠近执行单元,更是云端所需高价值数据的采集和初步处理单元,可以更好地支撑云端应用;反之,云计算通过大数据分析优化输出的业务规则或模型可以下发到边缘侧边缘计算基于新的业务规则或模型运行。
主要包括六种协同:
- 资源协同:边缘节点提供计算、存储、网络、虚拟化等基础设施资源、具有本地资源调度管理能力,同时可与云端协同,接受并执行云端资源调度管理策略,包括边缘节点的设备管理、资源管理以及网络连接管理。
- 数据协同:边缘节点主要负责现场/终端数据的采集,按照规则或数据模型对数据进行初步处理与分析,并将处理结果以及相关数据上传给云项不场远枳术里效掂的于阳、刀们一沮挖掘。
- 智能协同:边缘节点按照Al模型执行推理,实现分布式智能;云端开展AI的集中式模型训练,并将模型下发边缘节点。
- 应用管理协同:边缘节点提供应用部署与运行环境,并对本节点多个应用的生命周期进行管理调度;云端主要提供应用开发、测试环境,以及应用的生命周期管理能力。
- 业务管理协同:边缘节点提供模块化、微服务化的应用/数字孪生/网络等应用实例;云端主要提供按照客户需求实现应用/数字孪生/网络等的业务编排能力。
- 服务协同:边缘节点按照云端策略实现部分ECSaaS服务,通过ECSaaS与云端Saas的协同实现面向客户的按需SaaS服务;云端主要提供SaaS服务在云端和边缘节点的服务分布策略,以及云端承担的SaaS服务能力。
安全
- 提供可信的基础设施
- 为边缘应用提供可信赖的安全服务
- 保障安全的设备接入和协议转换
- 提供安全可信的网络及覆盖
应用场景
- 智慧园区
- 安卓云与云游戏
- 视频监控
- 工业互联网
- Cloud VR
数字孪生
数字孪生体技术是跨层级、跨尺度的现实世界和虚拟世界建立沟通的桥梁。
数字孪生体是现有或将有的物理实体对象的数字模型,通过实测、仿真和数据分析来实时诊断、预物理实体对象的状态,通过优化和指令来调控物理实体对象的行为,通过相关数字模型间的相互学习来进化自身,同时改进利益相关方在物理实体对象生命周期内的决策。
关键技术
-
建模
建模的目的是将我们对物理世界的理解进行简化和模型化。而数字孪生体的目的或本质是通过数字化和模型化,用信息换能量,以使少的能量消除各种物理实体、特别是复杂系统的不确定性。需求指标、生存期阶段和空间尺度构成了数字孪生体建模技术体系的三维空间。
-
仿真
如果说建模是模型化我们对物理世界或问题的理解,那么仿真就是验证和确认这种理解的
正确性和有效性。所以,数字化模型的仿真技木是创建和运行数子字生体、保业效子字土体司X应物理实体实现有效闭环的核心技术。仿真是将包含了确定性规律和完整机理的模型转化成软件的力孔米惧揪彻场杰的的性救和参X女模型正确,并拥有了完整的输入信息和环境数据,就可以基本准确地反映物理世界的特性和参数。
-
其他技术
VR、AR以及MR等增强现实技术、数字线程、系统工程和MBSE、物联网、云计算、雾计算、边缘计算、大数据技术、机器学习和区块链技术。
应用
数字孪生体主要应用于制造、产业、城市和战场。
相关文章:
【新版】系统架构设计师 - 未来信息综合技术
个人总结,仅供参考,欢迎加好友一起讨论 文章目录 架构 - 未来信息综合技术考点摘要信息物理系统CPS的体系架构CPS 的技术体系CPS应用场景 人工智能分类关键技术机器学习 机器人发展分类机器人4.0 边缘计算概念与特点边云协同安全应用场景 数字孪生关键技…...

CAD二次开发LineSegment2d
在C#的CAD二次开发中,LineSegment2d 是AutoCAD的.NET API中的一个类,用于表示二维空间中的线段。它包含了起点和终点的坐标信息,并提供了一些方法用于进行线段之间的计算和判断。 LineSegment2d 类具有以下常用属性和方法: Star…...

Linux shell编程学习笔记5:变量命名规则、变量类型、使用变量时要注意的事项
跟其他的高级开发语言一样,Linux Shell编程中使用的数据也需要保存在变量中。 Shell使用变量来控制其行为,并且可以通过更改变量值来更改Shell和其他程序的行为。 我们先来了解一下变量命令的规则、变量类型和使用变量时要注意的事项。 一、变量命名规…...
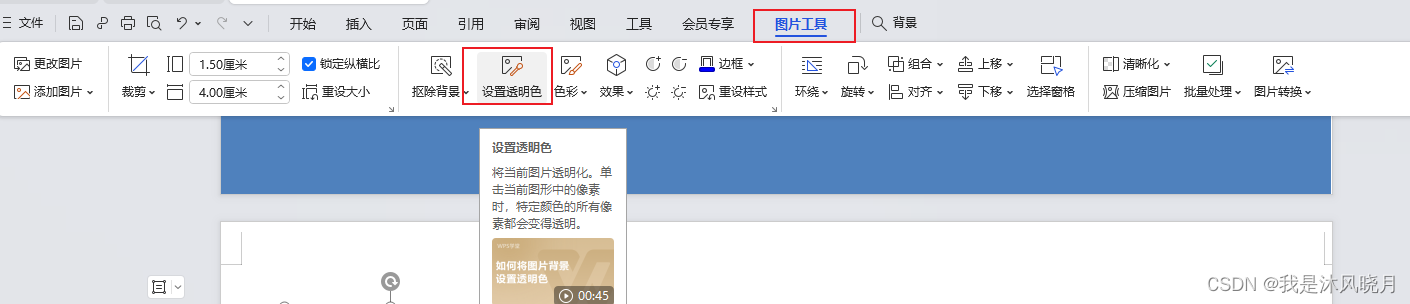
如何把word的页眉页脚改为图片
前言 亲戚A: 听说你是计算机专业? 沐风晓月: 是啊 亲戚A: 那正好,来看看我这个页眉怎么改成图片 沐风晓月: 一万匹马奔腾而过 亲戚B: 听说你是英语专业? 沐风晓月: 是啊…...

spring6-实现简易版IOC容器
手写简易版IOC容器 1、回顾Java反射2、实现Spring的IoC 我们都知道,Spring框架的IOC是基于Java反射机制实现的,下面我们先回顾一下java反射。 1、回顾Java反射 Java反射机制是在运行状态中,对于任意一个类,都能够知道这个类的所…...

Feign接口调用GET请求@RequestParam传参丢失
文章目录 问题现象排查解决GET加注解解决使用POST方式解决 时间戳传参失败 问题现象 项目使用的是Spring Cloud微服务,服务间调用使用的是Feign在一次服务调用时,发现GET传参丢失,没有传递过去任何参数加了RequestParam注解,发现…...
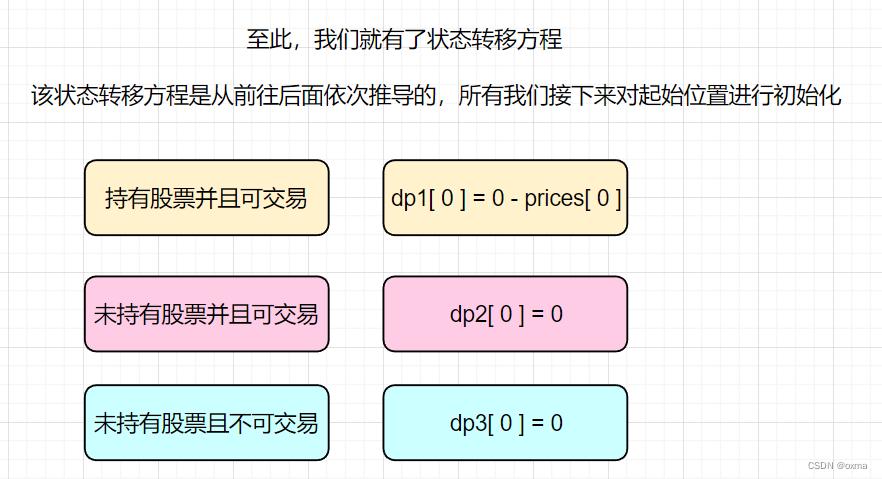
LeetCode每日一题 | 309.买卖股票的最佳时机含冷冻期
题目链接: 309. 买卖股票的最佳时机含冷冻期 - 力扣(LeetCode) 题目描述: 算法图解: 解题代码: class Solution { public:int maxProfit(vector<int>& prices) {int n prices.size();vector&…...
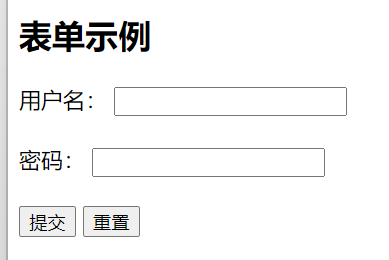
HTML的学习 Day02(列表、表格、表单)
文章目录 一、列表列表主要分为以下三种类型:1. 无序列表(Unordered List):2. 有序列表(Ordered List):将有序列表的数字改为字母或自定义内容li.../li 列表项标签中value属性,制定列…...

Android shape记录
之前一直觉得dataPath很好用,可以画各种矢量图。今天发现用shape画图也不错,记录一下自己用shape画的图。 一般使用shape就是定义形状、stroke边、solid内部、corners圆角等,代码 <?xml version "1.0" encoding "utf-8&q…...
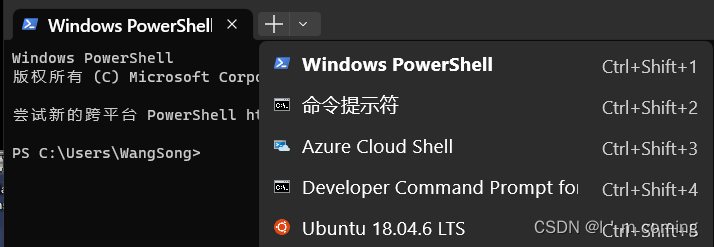
WSL2和ubuntu的安装过程
目录 1.WSL2的安装 2.Ubuntu的安装 3.安装完成后的打开方式 1.WSL2的安装 按下WINX键,选择Windows PowerShell (管理员) 1.1执行以下命令,该命令的作用是:启用适用于 Linux 的 Windows 子系统 dism.exe /online /enable-feature /featur…...

力扣第150题 逆波兰表达式求值 stack c++
题目 150. 逆波兰表达式求值 中等 给你一个字符串数组 tokens ,表示一个根据 逆波兰表示法 表示的算术表达式。 请你计算该表达式。返回一个表示表达式值的整数。 注意: 有效的算符为 、-、* 和 / 。每个操作数(运算对象)都…...
三、飞行和射击
目录 1.飞行的实现 2.限制玩家视角 3.射击的实现 4.附录 1.飞行的实现 (1)在Player预制体上挂载Configuration Joint组件,并修改其Y Drive属性 (2) 修改PlayerInput.cs和PlayerController.cs以实现飞行 PlayerIn…...
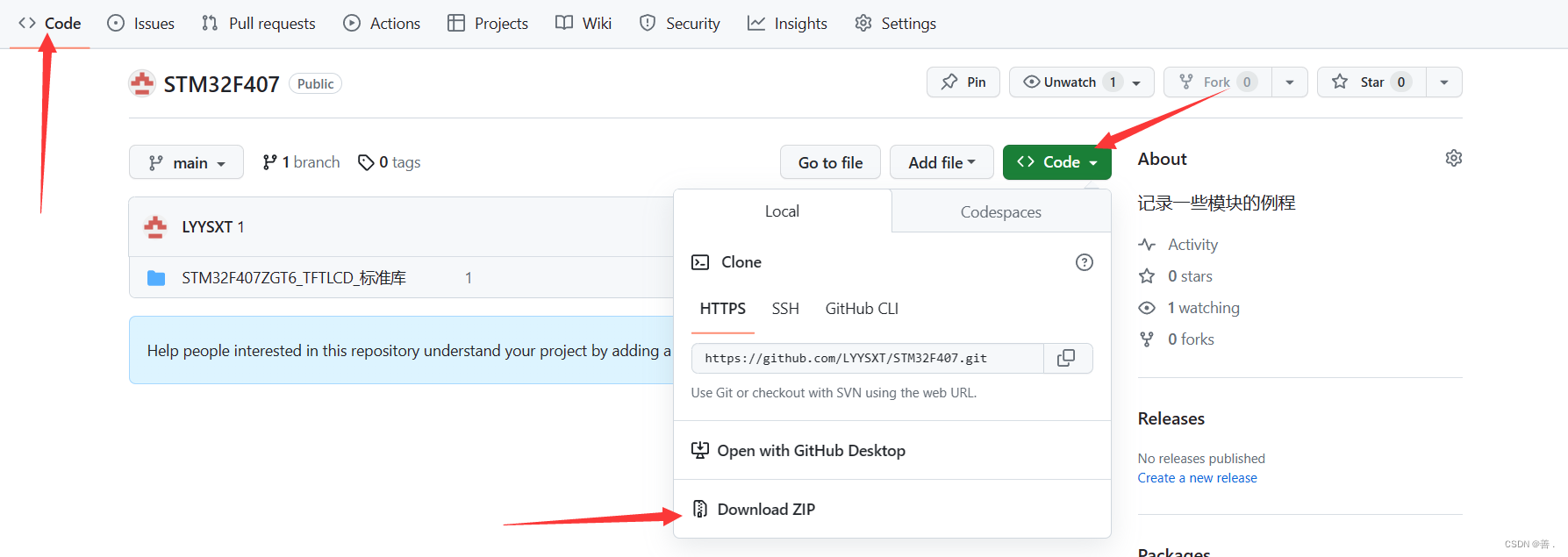
GitHub与GitHubDesktop的使用
1、介绍 见天来学习使用GitHub与GitHubDesktop。 学习前先来介绍一下什么是GitHub。 GitHub是一个基于Git的代码托管平台和开发者社区。它提供了一个Web界面,让开发者能够轻松地托管、共享和管理他们的软件项目。 在GitHub上,开发者可以创建自己的代…...

AIGC 微调的方法
AIGC 的微调方法可以分为以下步骤: 数据准备:收集尽可能多的数据,包括输入和输出数据,并将其划分为训练集、验证集和测试集。 模型选择:选择合适的模型结构,例如多层感知器(MLP)、卷…...

gcc编译webrtc x64
gcc使用Ubuntu系统已经有的gcc version 7.5.0 (Ubuntu 7.5.0-3ubuntu1~18.04) 1、下载离线版webrtc(也可以翻墙下载webrtc) 百度云链接: 链接: https://pan.baidu.com/s/1oHVz9bxXlW3Q6uO996c5XA 提取码: ojbs 2、下载gn https://github.com/timnieder…...

uni-app 实现凸起的 tabbar 底部导航栏
效果图 在 pages.json 中设置隐藏自带的 tabbar 导航栏 "custom": true, // 开启自定义tabBar(不填每次原来的tabbar在重新加载时都回闪现) 新建一个 custom-tabbar.vue 自定义组件页面 custom-tabbar.vue <!-- 自定义底部导航栏 --> <template><v…...
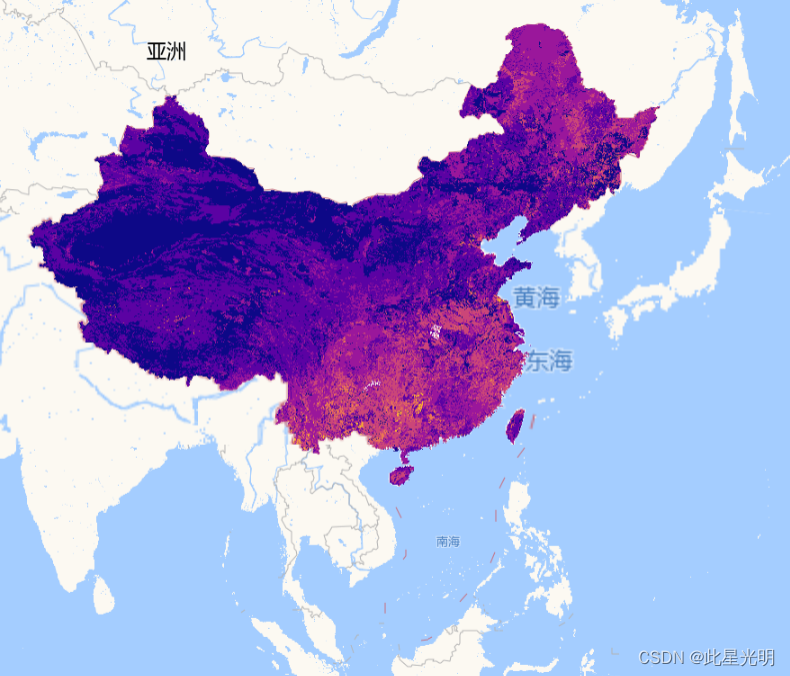
中国1km土壤特征数据集(2010年)
简介: 中国1km土壤特征数据集(2010)是基于第二次全国土壤调查的中国1:1000000比例尺土壤图和8595个土壤剖面图,以及美国农业部(USDA)中国区域土地和气候模拟标准,开发了一个多层土壤粒度分布数…...

计算机网络笔记 第二章 物理层
2.1 物理层概述 物理层要实现的功能 物理层接口特性 机械特性 形状和尺寸引脚数目和排列固定和锁定装置 电气特性 信号电压的范围阻抗匹配的情况传输速率距离限制 功能特性 -规定接口电缆的各条信号线的作用 过程特性 规定在信号线上传输比特流的一组操作过程࿰…...
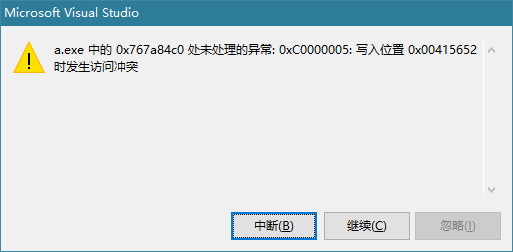
使用CreateProcess崩溃:处未处理的异常: 0xC0000005: 写入位置 0x00415652 时发生访问冲突
问题代码 if (!CreateProcess(NULL,L"pela.exe",NULL,NULL,TRUE,NULL,NULL,NULL,&si,&pi)){return 0;}如果CreateProcess的第二个参数字符串是常量或者是储存在堆中的就会被写保护,崩溃。如果字符串定义到栈或者全局变量就不存在此问题了。 正确的…...
Java 华为真题-出租车计费
需求 程序员小明打了一辆出租车去上班。出于职业敏感,他注意到这辆出租车的计费表有点问题,总是偏大。 出租车司机解释说他不喜欢数字4,所以改装了计费表,任何数字位置遇到数字4就直接跳过,其余功能都正常。 比如&…...
接口测试中缓存处理策略
在接口测试中,缓存处理策略是一个关键环节,直接影响测试结果的准确性和可靠性。合理的缓存处理策略能够确保测试环境的一致性,避免因缓存数据导致的测试偏差。以下是接口测试中常见的缓存处理策略及其详细说明: 一、缓存处理的核…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...

XCTF-web-easyupload
试了试php,php7,pht,phtml等,都没有用 尝试.user.ini 抓包修改将.user.ini修改为jpg图片 在上传一个123.jpg 用蚁剑连接,得到flag...

基于大模型的 UI 自动化系统
基于大模型的 UI 自动化系统 下面是一个完整的 Python 系统,利用大模型实现智能 UI 自动化,结合计算机视觉和自然语言处理技术,实现"看屏操作"的能力。 系统架构设计 #mermaid-svg-2gn2GRvh5WCP2ktF {font-family:"trebuchet ms",verdana,arial,sans-…...

【Oracle APEX开发小技巧12】
有如下需求: 有一个问题反馈页面,要实现在apex页面展示能直观看到反馈时间超过7天未处理的数据,方便管理员及时处理反馈。 我的方法:直接将逻辑写在SQL中,这样可以直接在页面展示 完整代码: SELECTSF.FE…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...

在HarmonyOS ArkTS ArkUI-X 5.0及以上版本中,手势开发全攻略:
在 HarmonyOS 应用开发中,手势交互是连接用户与设备的核心纽带。ArkTS 框架提供了丰富的手势处理能力,既支持点击、长按、拖拽等基础单一手势的精细控制,也能通过多种绑定策略解决父子组件的手势竞争问题。本文将结合官方开发文档,…...
)
postgresql|数据库|只读用户的创建和删除(备忘)
CREATE USER read_only WITH PASSWORD 密码 -- 连接到xxx数据库 \c xxx -- 授予对xxx数据库的只读权限 GRANT CONNECT ON DATABASE xxx TO read_only; GRANT USAGE ON SCHEMA public TO read_only; GRANT SELECT ON ALL TABLES IN SCHEMA public TO read_only; GRANT EXECUTE O…...

【决胜公务员考试】求职OMG——见面课测验1
2025最新版!!!6.8截至答题,大家注意呀! 博主码字不易点个关注吧,祝期末顺利~~ 1.单选题(2分) 下列说法错误的是:( B ) A.选调生属于公务员系统 B.公务员属于事业编 C.选调生有基层锻炼的要求 D…...

今日科技热点速览
🔥 今日科技热点速览 🎮 任天堂Switch 2 正式发售 任天堂新一代游戏主机 Switch 2 今日正式上线发售,主打更强图形性能与沉浸式体验,支持多模态交互,受到全球玩家热捧 。 🤖 人工智能持续突破 DeepSeek-R1&…...