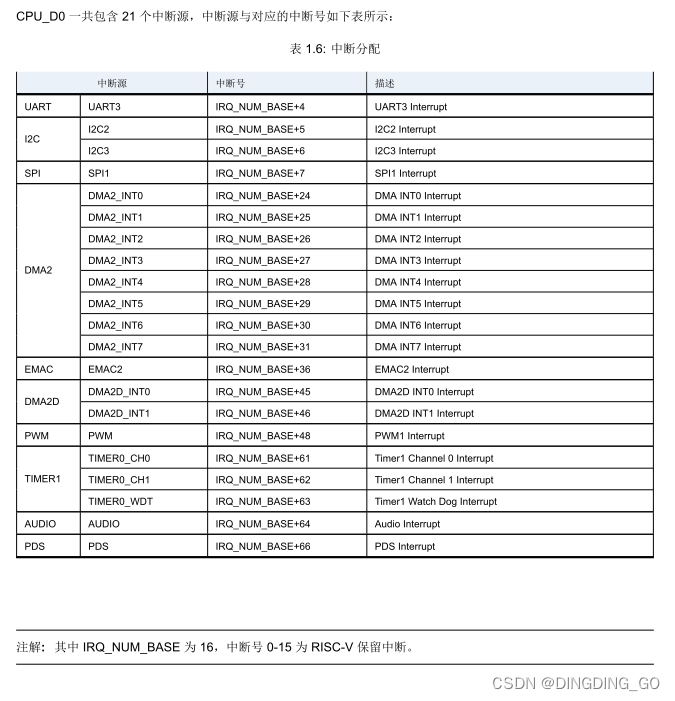
部署并应用ByteTrack实现目标跟踪
尽管YOLOv8已经集成了ByteTrack算法,但在这里我还是想利用ByteTrack官网的代码,自己实现目标跟踪。
要想应用ByteTrack算法,首先就要从ByteTrack官网上下载并安装。虽然官网上介绍得很简单,只需要区区6行代码,但对于国内用户来说,要想安装ByteTrack,只要这些代码是万万不会成功的。我按照复现经典目标跟踪算法ByteTrack之路:调通第一个demo这个网站介绍的安装过程成功地实现了ByteTrack的部署。该博文介绍得很详细,我在这里就不再赘述了。下面我详细介绍如何应用ByteTrack。
我们首先给出ByteTrack的核心关键代码。
导入ByteTrack:
import sys
sys.path.append(f"D:/ByteTrack")
from yolox.tracker.byte_tracker import BYTETrackerD:\ByteTrack为下载ByteTrack时,其所在的目录。
下面设置ByteTrack的参数:
class BYTETrackerArgs:track_thresh: float = 0.25track_buffer: int = 30match_thresh: float = 0.8aspect_ratio_thresh: float = 3.0min_box_area: float = 1.0mot20: bool = Falsetrack_thresh表示跟踪置信阈值。简单地说,该值越大,被赋予目标跟踪ID的数量越少,也就意味着系统会把不太确定的轨迹抛弃掉。默认值为0.5。
track_buffer用于保留丢失轨迹的帧数。对于没有出现的ID,最多保留该值的帧数。默认值为30。
match_thresh表示跟踪匹配阈值。该值越大,目标与轨迹越容易匹配上。默认值为0.8。
aspect_ratio_thresh表示目标边框长宽之比的阈值。目标长宽之比大于该值时会把该目标滤除掉,这是因为长宽比过大时,显然它不会是任何物体。默认值为1.6。
min_box_area表示目标边框的面积阈值。目标面积小于该值时会把该目标滤除掉。默认值为10。
mot20表示是否使用mot20数据集进行测试。默认值为False。
实例化ByteTrack,并带入参数:
byte_tracker = BYTETracker(BYTETrackerArgs(), frame_rate=fps)frame_rate表示视频每秒传输的帧数。默认值为30。
得到目标ID:
tracks = byte_tracker.update(outputs, img_info=frame.shape, img_size=frame.shape)outputs表示目标检测器的输出,ByteTrack需要先进行目标检测,然后才能利用ByteTrack算法实现跟踪,outputs应为二维数组,第一维表示目标,第二维表示该目标的信息,其前四个元素为目标边框的左上角和右下角的坐标,第5个元素为该目标的得分值,一般我们可以为该值赋予目标的置信值。
img_info表示输入视频图像的尺寸。
img_size表示输出图像的尺寸,如果不对视频图像的尺寸进行改变的话,就让该值等于img_info。
输出tracks即为目标跟踪的结果,我们先用print(tracks)看看它的输出:
[OT_2_(1-28), OT_3_(1-28), OT_4_(1-28), OT_7_(26-28)]从中可以看出,我们共得到了4个目标跟踪结果,它们的ID分别为2、3、4和7,其中ID为2的目标在第1帧开始出现,28为当前帧数,即在第28帧时,我们使用了print(tracks)这个代码。
我们再看看tracks的几个重要属性:
print(tracks[0].tlbr)
print(tracks[0].tlwh)
print(tracks[0].track_id)
print(tracks[0].score)输出为:
[ 820.39 184.35 852.77 204.6]
[ 820.39 184.35 32.382 20.246]
2
0.7806676tlbr表示该目标边框的左上角和右下角坐标;tlwh表示该目标边框的左上角坐标和它的长宽;track_id表示该目标的ID;score表示该目标的得分值。
有了目标ID,我们就可以为视频添加各类信息,如为目标添加ID和类别,以及绘制目标边框。我们可以直接利用tracks完成上述操作,但这里会有几个问题:第一由tracks得到的目标边框没有由outputs得到的目标边框准确;第二tracks没有目标类别信息。因此在这里我们还是利用outputs为目标添加各类信息,它要解决的问题是目标的ID是什么。
我们只需比较outputs和tracks的目标尺寸,完成匹配成对,就可以为outputs中的目标赋予ID。我们利用IOU算法来实现尺寸比较,为此我们编写下面函数:
def iou(box: np.ndarray, boxes: np.ndarray):# 计算交集xy_max = np.minimum(boxes[:, 2:], box[2:])xy_min = np.maximum(boxes[:, :2], box[:2])inter = np.clip(xy_max-xy_min, a_min=0, a_max=np.inf)inter = inter[:, 0]*inter[:, 1]# 计算面积area_boxes = (boxes[:, 2]-boxes[:, 0])*(boxes[:, 3]-boxes[:, 1])area_box = (box[2]-box[0])*(box[3]-box[1])return inter/(area_box+area_boxes-inter)对于这个函数我们不做过多解释,它实现一对多的计算。下面给出它的应用:
for track in tracks:box_iou = iou(track.tlbr, outputs[:,:4])maxindex = np.argmax(box_iou)newoutput = np.append(outputs[maxindex], track.track_id)print(newoutput)
输出为:
[820.86 184.48 852.67 204.75 0.78067 2 2]
[766.21 212.08 808.44 246.9 0.73741 2 3]
[479.06 178.3 517.84 217.07 0.68729 2 4]
[508.42 147.98 529.87 165.88 0.62819 2 7]每行的最后一个元素就是它的ID。
ByteTrack严重依赖于目标检测器的准确性。ByteTrack利用每个目标的得分值来计算目标跟踪,并赋予ID。我们一般都是把目标检测得到的置信值作为这个得分值传递给ByteTrack,作为其计算的依据。因此当置信值偏低,并且track_thresh偏高时,会出现tracks得到的目标少于outputs的目标,也就出现了有一些目标没有被赋予ID。
为了减少这类问题出现,我们可以人为的为目标置信值赋予更高的值(充分信任目标检测器),然后再传给ByteTrack,即
for output in outputs:output[4] = 0.95应用ByteTrack进行目标跟踪的关键部分我们都解释清楚了,下面就给出完整的代码,在这里,我们仍然选择YOLOv8作为目标检测器,除了YOLO易于实现外,另一个原因是它的输出与ByteTrack所要求的数据输入的格式完全相同:
import numpy as np
import cv2
from ultralytics import YOLO
import sys
sys.path.append(f"D:/ByteTrack")
from yolox.tracker.byte_tracker import BYTETrackerclass BYTETrackerArgs:track_thresh: float = 0.25 track_buffer: int = 30 match_thresh: float = 0.8 aspect_ratio_thresh: float = 3.0min_box_area: float = 1.0mot20: bool = False model = YOLO('yolov8l.pt')cap = cv2.VideoCapture("D:/track/Highway Traffic.mp4")
fps = cap.get(cv2.CAP_PROP_FPS)
size = (int(cap.get(cv2.CAP_PROP_FRAME_WIDTH)),int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT)))
fNUMS = cap.get(cv2.CAP_PROP_FRAME_COUNT)
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
videoWriter = cv2.VideoWriter("D:/track/mytrack.mp4", fourcc, fps, size)byte_tracker = BYTETracker(BYTETrackerArgs(),frame_rate= fps)def box_label(image, box, label='', color=(128, 128, 128), txt_color=(255, 255, 255)):p1, p2 = (int(box[0]), int(box[1])), (int(box[2]), int(box[3]))cv2.rectangle(image, p1, p2, color, thickness=1, lineType=cv2.LINE_AA)if label:w, h = cv2.getTextSize(label, 0, fontScale=2 / 3, thickness=1)[0] outside = p1[1] - h >= 3p2 = p1[0] + w, p1[1] - h - 3 if outside else p1[1] + h + 3cv2.rectangle(image, p1, p2, color, -1, cv2.LINE_AA)cv2.putText(image,label, (p1[0], p1[1] - 2 if outside else p1[1] + h + 2),0, 2/3, txt_color, thickness=1, lineType=cv2.LINE_AA)def iou(box: np.ndarray, boxes: np.ndarray):xy_max = np.minimum(boxes[:, 2:], box[2:])xy_min = np.maximum(boxes[:, :2], box[:2])inter = np.clip(xy_max-xy_min, a_min=0, a_max=np.inf)inter = inter[:, 0]*inter[:, 1]area_boxes = (boxes[:, 2]-boxes[:, 0])*(boxes[:, 3]-boxes[:, 1])area_box = (box[2]-box[0])*(box[3]-box[1])return inter/(area_box+area_boxes-inter)while cap.isOpened():success, frame = cap.read()if success: results = model(frame,conf=0.5)outputs = results[0].boxes.data.cpu().numpy()if outputs is not None:for output in outputs:output[4] = 0.95tracks = byte_tracker.update(outputs[:,:5], img_info=frame.shape, img_size=frame.shape)for track in tracks:box_iou = iou(track.tlbr, outputs[:,:4])maxindex = np.argmax(box_iou)if outputs[maxindex, 5] == 2:box_label(frame, outputs[maxindex], '#'+str(track.track_id)+' car' , (167, 146, 11))elif outputs[maxindex, 5] == 5:box_label(frame, outputs[maxindex], '#'+str(track.track_id)+' bus', (186, 55, 2))elif outputs[maxindex, 5] == 7:box_label(frame, outputs[maxindex], '#'+str(track.track_id)+' truck', (19, 222, 24))cv2.putText(frame, "https://blog.csdn.net/zhaocj", (25, 50),cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2)cv2.imshow("ByteTrack", frame)videoWriter.write(frame)if cv2.waitKey(1) & 0xFF == ord("q"):breakelse:breakcap.release()
videoWriter.release()
cv2.destroyAllWindows()结果为:
ByteTrack
我们也可以再看一个示例:
people
相关文章:

部署并应用ByteTrack实现目标跟踪
尽管YOLOv8已经集成了ByteTrack算法,但在这里我还是想利用ByteTrack官网的代码,自己实现目标跟踪。 要想应用ByteTrack算法,首先就要从ByteTrack官网上下载并安装。虽然官网上介绍得很简单,只需要区区6行代码,但对于国…...

MacOS怎么配置JDK环境变量
1 输入命令看是否配置了JDk 的环境变量:echo $JAVA_HOME 要是什么也没输出 证明是没配置 2 输入命令编辑 sudo vim ~/.bash_profile 然后按 i ,进入编辑模式,粘贴下面的代码,注意:JAVA_HOME后面路径需要改成自己的版…...

Spring Boot 开发16个实用的技巧
当涉及到使用Spring Boot开发应用程序时,以下是16个实用的技巧: 1. **使用Spring Initializr**:Spring Initializr是一个快速创建Spring Boot项目的工具,可以帮助您选择项目依赖和生成项目骨架。 2. **自动配置**:Sp…...

《机器学习实战》学习记录-ch2
PS: 个人笔记,建议不看 原书资料:https://github.com/ageron/handson-ml2 2.1数据获取 import pandas as pd data pd.read_csv(r"C:\Users\cyan\Desktop\AI\ML\handson-ml2\datasets\housing\housing.csv")data.head() data.info()<clas…...
lv7 嵌入式开发-网络编程开发 07 TCP服务器实现
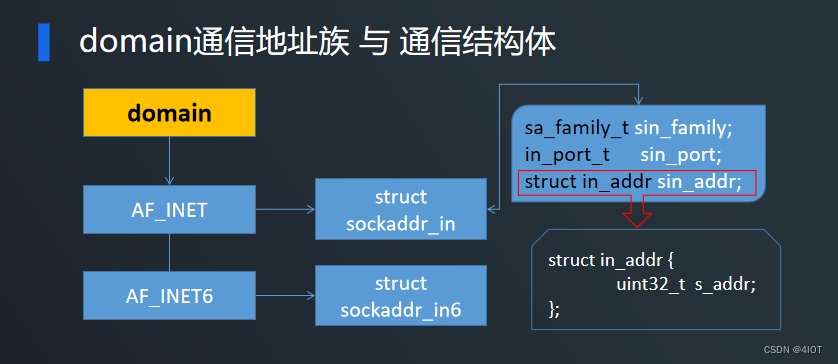
目录 1 函数介绍 1.1 socket函数 与 通信域 1.2 bind函数 与 通信结构体 1.3 listen函数 与 accept函数 2 TCP服务端代码实现 3 TCP客户端代码实现 4 代码优化 5 练习 1 函数介绍 其中read、write、close在IO中已经介绍过,只需了解socket、bind、listen、acc…...
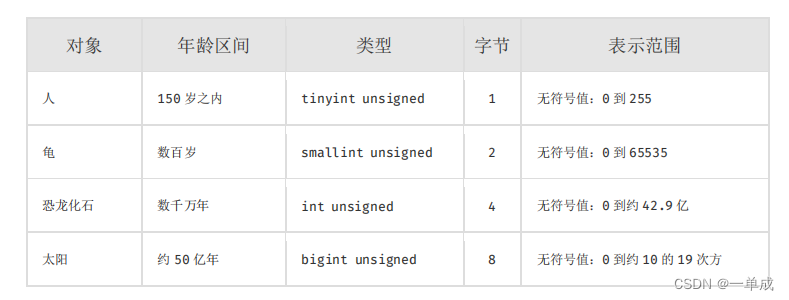
mysql技术文档--阿里巴巴java准则《Mysql数据库建表规约》--结合阿丹理解尝试解读--国庆开卷
阿丹: 国庆快乐呀大家! 在项目开始前一个好的设计、一个健康的表关系,不仅会让开发变的有趣舒服,也会在后期的维护和升级迭代中让系统不断的成长。那么今天就认识和解读一下阿里的准则!! 建表规约 表达是…...
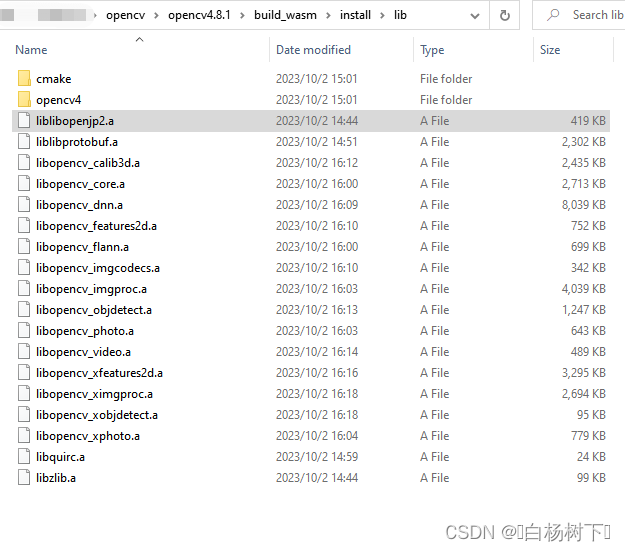
Qt+openCV学习笔记(十六)Qt6.6.0rc+openCV4.8.1+emsdk3.1.37编译静态库
前言: 有段时间没来写文章了,趁编译库的空闲,再写一篇记录文档 WebAssembly的发展逐渐成熟,即便不了解相关技术,web前端也在不经意中使用了相关技术的库,本篇文档记录下如何编译WebAssembly版本的openCV&…...

JUC第十四讲:JUC锁: ReentrantReadWriteLock详解
JUC第十四讲:JUC锁: ReentrantReadWriteLock详解 本文是JUC第十四讲:JUC锁 - ReentrantReadWriteLock详解。ReentrantReadWriteLock表示可重入读写锁,ReentrantReadWriteLock中包含了两种锁,读锁ReadLock和写锁WriteLockÿ…...

在vue3中使用vite-svg-loader插件
vite-svg-loader插件可以让我们像使用vue组件那样使用svg图,使用起来超级方便。 安装 npm install vite-svg-loader --save-dev使用 import svgLoader from vite-svg-loaderexport default defineConfig({plugins: [vue(), svgLoader()] })组件里使用 在路径后加…...
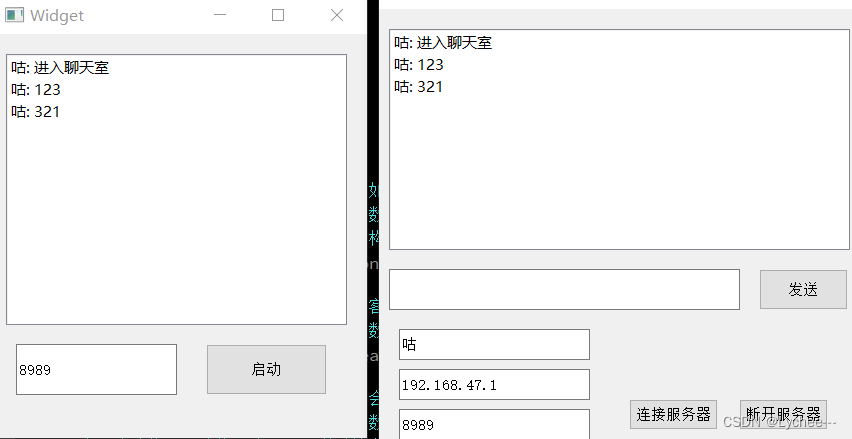
国庆10.4
QT实现TCP服务器客户端 服务器 头文件 #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QTcpServer> //服务器头文件 #include <QTcpSocket> //客户端头文件 #include <QList> //链表容器 #include <QMe…...

2023/8/12 下午8:41:46 树状控件guilite
2023/8/12 下午8:41:46 树状控件guilite 2023/8/12 下午8:42:08 树状控件(Tree View)是一种常见的图形用户界面(GUI)元素,它通常用于显示层次结构数据或文件系统的目录结构。Guilite 是一个轻量级的跨平台 GUI 库,支持多种控件,包括树状控件。 在 Guilite 中使用树状…...
BL808学习日志-2-LVGL for M0 and D0
一、lvgl测试环境 对拿到的M1S_DOCK开发板进行开发板测试,博流的官方SDK是支持M0和D0两个内核都进行测试的;但是目前只实现了M0的LVGLBenchmark,测试D0内核中发现很多莫名其妙的问题。一会详细记录。 使用的是开发板自带的SPI显示屏ÿ…...

treectrl类封装 2023/8/13 下午4:07:35
2023/8/13 下午4:07:35 treectrl类封装 2023/8/13 下午4:07:53 TreeCtrl 类是一个常用的图形用户界面控件,用于实现树形结构的展示和交互。以下是一个简单的 TreeCtrl 类的封装示例: python import wxclass MyTreeCtrl(wx.TreeCtrl):def __init__(self, parent):super()…...
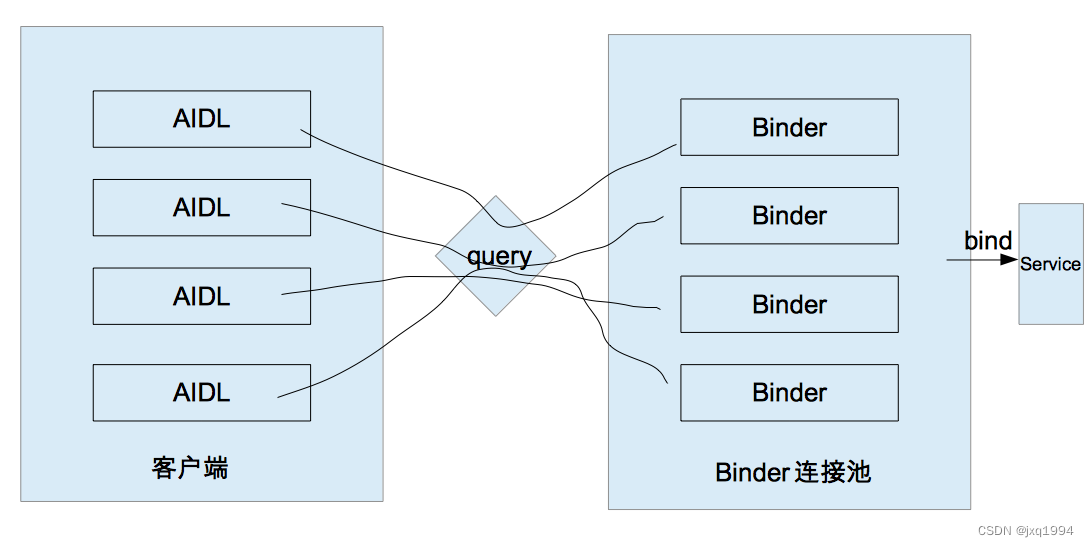
Android学习之路(20) 进程间通信
IPC IPC为 (Inter-Process Communication) 缩写,称为进程间通信或跨进程通信,指两个进程间进行数据交换的过程。安卓中主要采用 Binder 进行进程间通信,当然也支持其他 IPC 方式,如:管道,Socket࿰…...
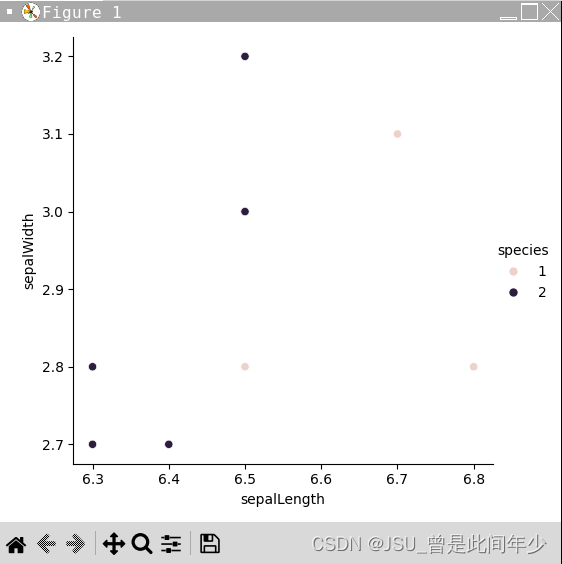
机器学习——KNN算法流程详解(以iris为例)
、 目 录 前情说明 问题陈述 数据说明 KNN算法流程概述 代码实现 运行结果 基于可视化的改进 可视化代码 全部数据可视化总览 分类投票结果 改进后最终代码 前情说明 本书基于《特征工程入门与入门与实践》庄家盛 译版P53页K最近邻(KNN)算…...
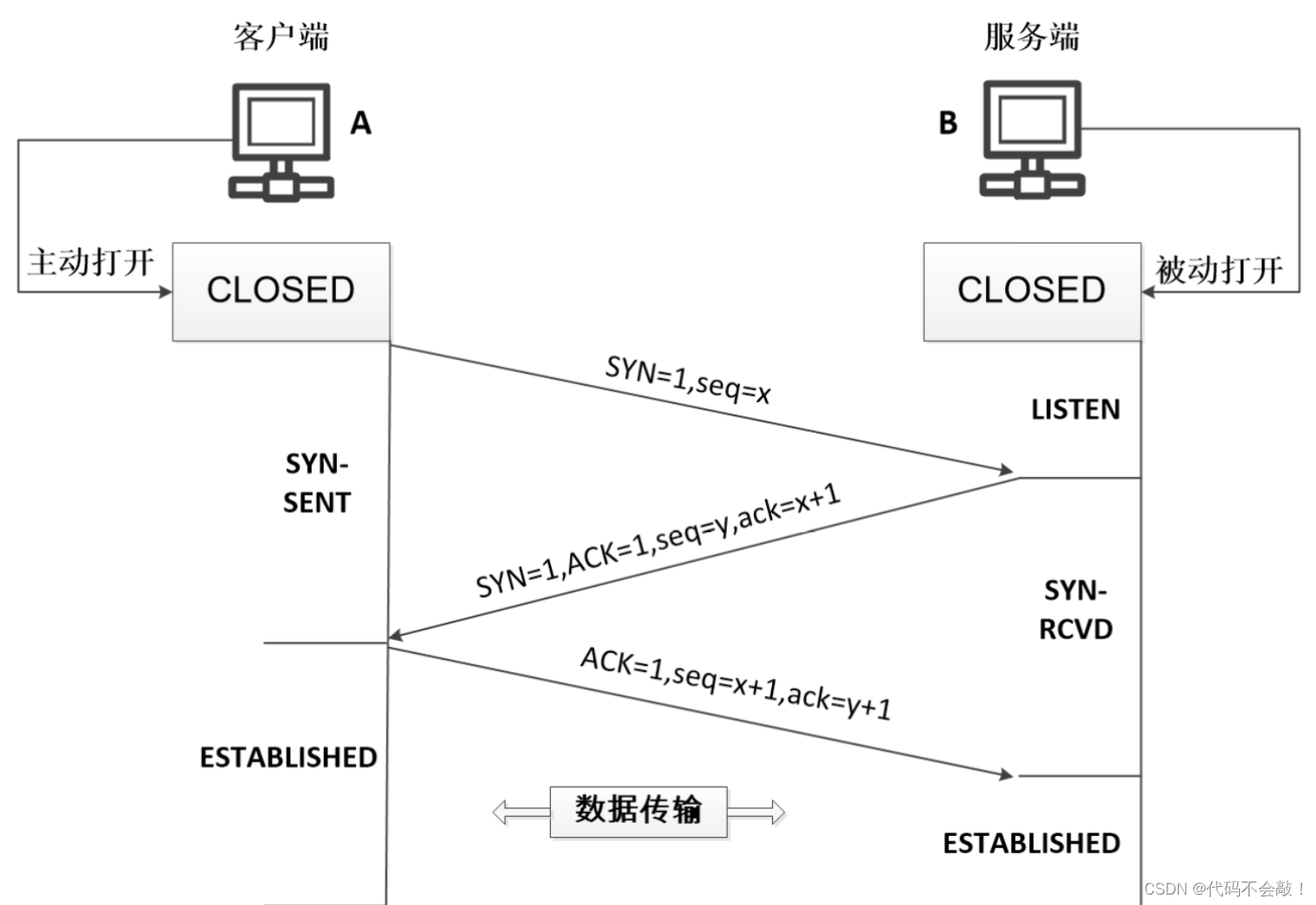
国庆假期day5
作业:请写出七层模型及每一层的功能,请绘制三次握手四次挥手的流程图 1.OSI七层模型: 应用层--------提供函 表示层--------表密缩 会话层--------会话 传输层--------进程的接收和发送 网络层--------寻主机 数据链路层----相邻节点的可靠传…...

ES6中的let、const
let ES6中新增了let命令,用来声明变量,和var类似但是也有一定的区别 1. 块级作用域 只能在当前作用域内使用,各个作用域不能互相使用,否则会报错。 {let a 1;var b 1; } console.log(a); // 会报错 console.log(b); // 1为什…...

Python 列表操作指南3
示例,将新列表中的所有值设置为 ‘hello’: newlist [hello for x in fruits]表达式还可以包含条件,不像筛选器那样,而是作为操纵结果的一种方式: 示例,返回 “orange” 而不是 “banana”: …...
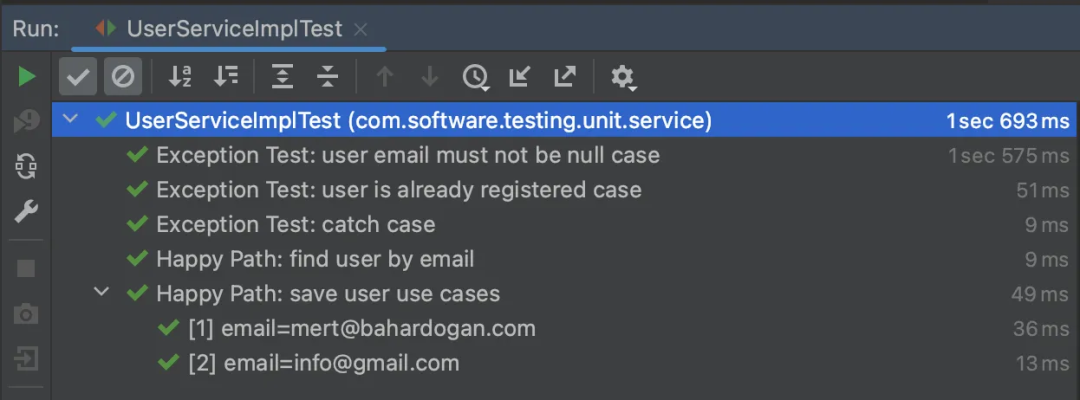
三个要点,掌握Spring Boot单元测试
单元测试是软件开发中不可或缺的重要环节,它用于验证软件中最小可测试单元的准确性。结合运用Spring Boot、JUnit、Mockito和分层架构,开发人员可以更便捷地编写可靠、可测试且高质量的单元测试代码,确保软件的正确性和质量。 一、介绍 本文…...

【nginx】Nginx配置:
文章目录 一、什么是Nginx:二、为什么使用Nginx:三、如何处理请求:四、什么是正向代理和反向代理:五、nginx 启动和关闭:六、目录结构:七、配置文件nginx.conf:八、location:九、单页…...
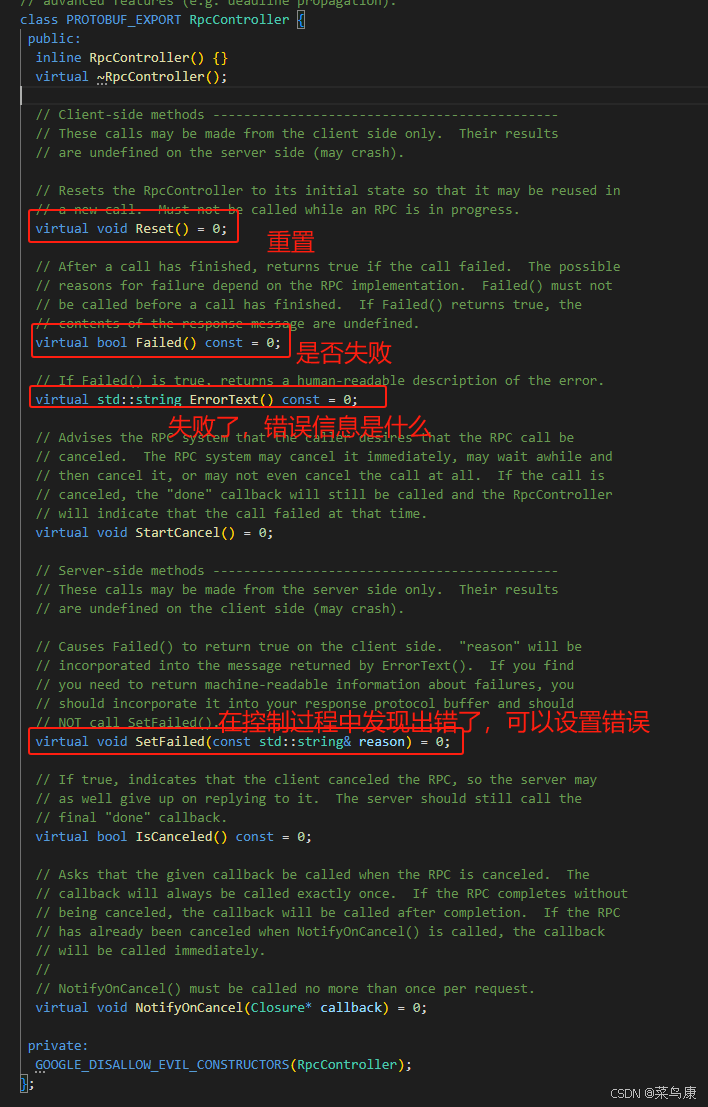
C++实现分布式网络通信框架RPC(3)--rpc调用端
目录 一、前言 二、UserServiceRpc_Stub 三、 CallMethod方法的重写 头文件 实现 四、rpc调用端的调用 实现 五、 google::protobuf::RpcController *controller 头文件 实现 六、总结 一、前言 在前边的文章中,我们已经大致实现了rpc服务端的各项功能代…...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
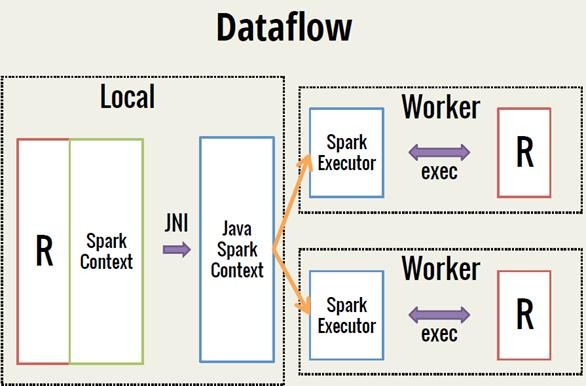
Spark 之 入门讲解详细版(1)
1、简介 1.1 Spark简介 Spark是加州大学伯克利分校AMP实验室(Algorithms, Machines, and People Lab)开发通用内存并行计算框架。Spark在2013年6月进入Apache成为孵化项目,8个月后成为Apache顶级项目,速度之快足见过人之处&…...
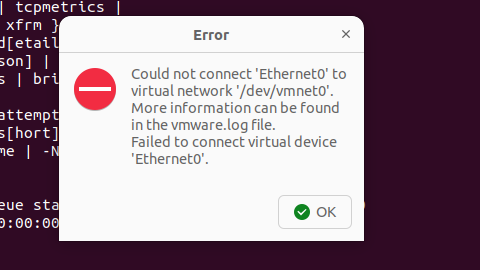
解决Ubuntu22.04 VMware失败的问题 ubuntu入门之二十八
现象1 打开VMware失败 Ubuntu升级之后打开VMware上报需要安装vmmon和vmnet,点击确认后如下提示 最终上报fail 解决方法 内核升级导致,需要在新内核下重新下载编译安装 查看版本 $ vmware -v VMware Workstation 17.5.1 build-23298084$ lsb_release…...

蓝牙 BLE 扫描面试题大全(2):进阶面试题与实战演练
前文覆盖了 BLE 扫描的基础概念与经典问题蓝牙 BLE 扫描面试题大全(1):从基础到实战的深度解析-CSDN博客,但实际面试中,企业更关注候选人对复杂场景的应对能力(如多设备并发扫描、低功耗与高发现率的平衡)和前沿技术的…...
ServerTrust 并非唯一
NSURLAuthenticationMethodServerTrust 只是 authenticationMethod 的冰山一角 要理解 NSURLAuthenticationMethodServerTrust, 首先要明白它只是 authenticationMethod 的选项之一, 并非唯一 1 先厘清概念 点说明authenticationMethodURLAuthenticationChallenge.protectionS…...
)
论文解读:交大港大上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一)
宇树机器人多姿态起立控制强化学习框架论文解析 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化学习框架(一) 论文解读:交大&港大&上海AI Lab开源论文 | 宇树机器人多姿态起立控制强化…...

基于Java Swing的电子通讯录设计与实现:附系统托盘功能代码详解
JAVASQL电子通讯录带系统托盘 一、系统概述 本电子通讯录系统采用Java Swing开发桌面应用,结合SQLite数据库实现联系人管理功能,并集成系统托盘功能提升用户体验。系统支持联系人的增删改查、分组管理、搜索过滤等功能,同时可以最小化到系统…...
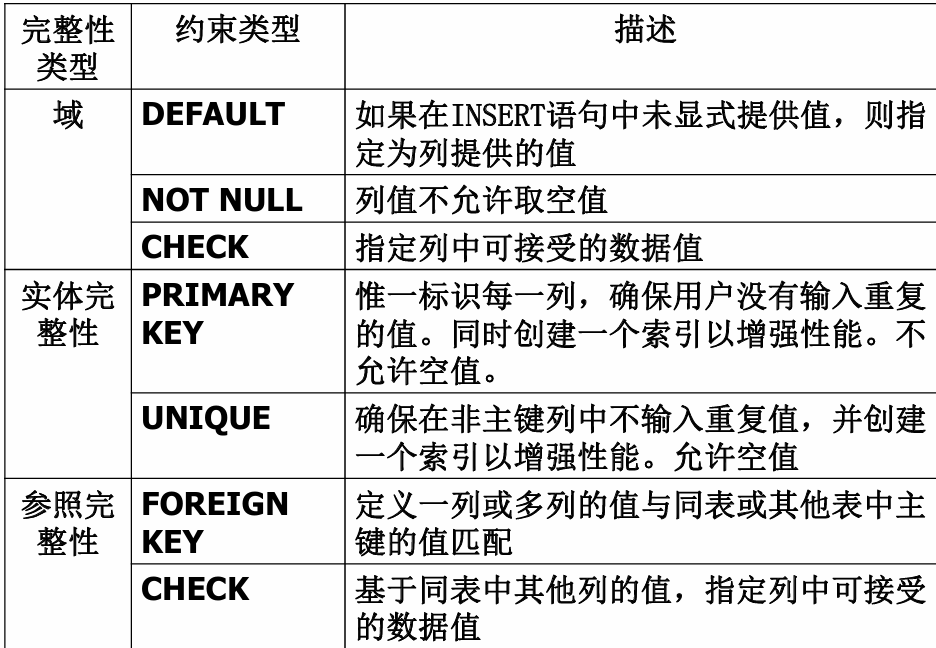
七、数据库的完整性
七、数据库的完整性 主要内容 7.1 数据库的完整性概述 7.2 实体完整性 7.3 参照完整性 7.4 用户定义的完整性 7.5 触发器 7.6 SQL Server中数据库完整性的实现 7.7 小结 7.1 数据库的完整性概述 数据库完整性的含义 正确性 指数据的合法性 有效性 指数据是否属于所定…...

虚拟电厂发展三大趋势:市场化、技术主导、车网互联
市场化:从政策驱动到多元盈利 政策全面赋能 2025年4月,国家发改委、能源局发布《关于加快推进虚拟电厂发展的指导意见》,首次明确虚拟电厂为“独立市场主体”,提出硬性目标:2027年全国调节能力≥2000万千瓦࿰…...