【AI视野·今日Robot 机器人论文速览 第四十六期】Tue, 3 Oct 2023
AI视野·今日CS.Robotics 机器人学论文速览
Tue, 3 Oct 2023
Totally 76 papers
👉上期速览✈更多精彩请移步主页
Interesting:
📚Aerial Interaction with Tactile, 无人机与触觉的结合,实现空中交互与相互作用。(from CMU)

website:https://sites.google.com/view/aerial-system-gelsight
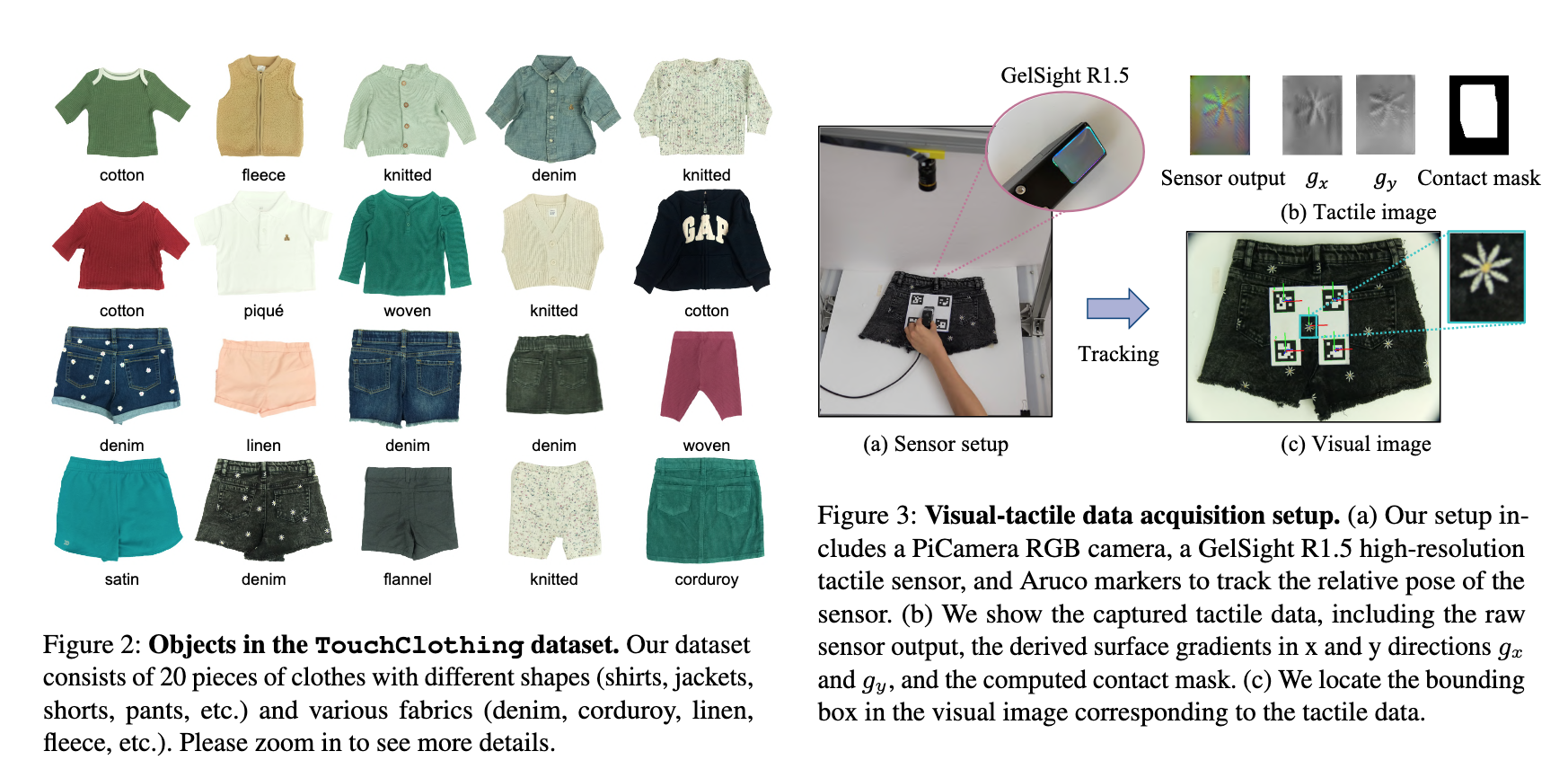
📚Controllable Visual-Tactile Synthesis, 视觉与触觉的合成与渲染。(from CMU)
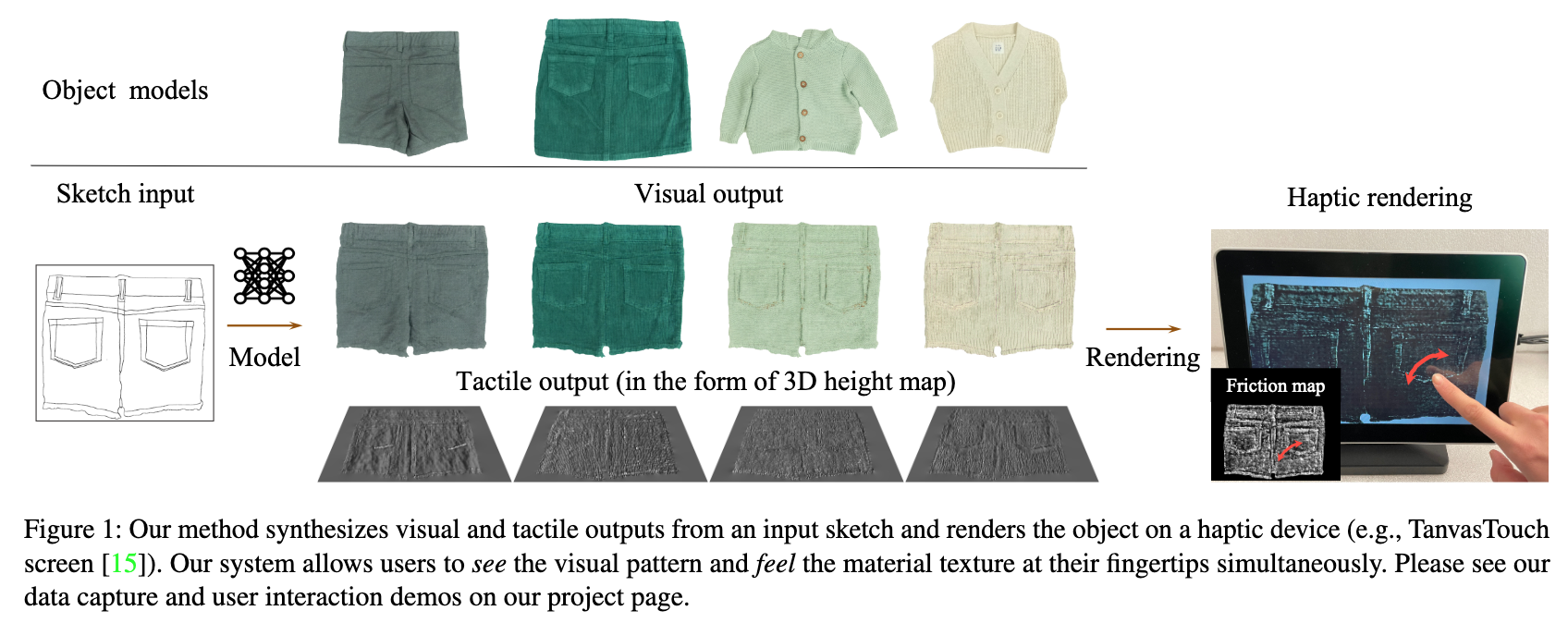

触觉屏幕Tanvas
webiste:https://visual-tactile-synthesis.github.io/
📚学习陡峭沙地里如何高速转向, (from 佐治亚理工)
Daily Robotics Papers
| Generalized Animal Imitator: Agile Locomotion with Versatile Motion Prior Authors Ruihan Yang, Zhuoqun Chen, Jianhan Ma, Chongyi Zheng, Yiyu Chen, Quan Nguyen, Xiaolong Wang 动物的敏捷性,特别是在跑步、转身、跳跃和后空翻等复杂活动中,是机器人系统设计的典范。将这套行为转移到腿式机器人系统中引入了重要的问题:如何训练机器人同时学习多种运动行为;机器人如何平滑过渡地执行这些任务;以及哪些策略允许综合应用这些技能。 VIM 之前的多功能可指导运动是一种强化学习框架,旨在整合一系列适合高级机器人应用的敏捷运动任务。我们的框架使腿式机器人能够通过模仿动物动作和具有功能奖励和风格化奖励的手动设计动作来学习各种敏捷的低级技能。功能性奖励指导机器人采用各种技能的能力,而风格化奖励则确保性能与参考动作保持一致。我们对 VIM 框架的评估涵盖模拟环境和现实世界的部署。据我们了解,这是第一个允许机器人使用单一控制器同时学习多种敏捷运动任务的工作。 |
| EAST: Environment Aware Safe Tracking using Planning and Control Co-Design Authors Zhichao Li, Yinzhuang Yi, Zhuolin Niu, Nikolay Atanasov 本文考虑了具有移动障碍物的未知环境中的自主机器人导航问题。我们提出了一种新方法,系统地将规划、运动预测和安全度量设计结合在一起,以实现环境自适应和安全导航。该算法平衡了行驶距离的最优性和通过间隙的安全性。机器人根据感知到的环境自适应地调整行进速度,在开阔的区域快速前进,在狭窄的通道中减速,并采取必要的动作来避开危险的障碍物。在我们的方法中,方向距离测量、圆锥形状运动预测和自定义成本图被正确集成,以根据周围环境的局部几何形状准确评估系统风险。使用这种风险估计,参考调节器技术和控制屏障功能一起工作,以在动态环境中实现自适应和安全的路径跟踪。 |
| Fleet Policy Learning via Weight Merging and An Application to Robotic Tool-Use Authors Lirui Wang, Kaiqing Zhang, Allan Zhou, Max Simchowitz, Russ Tedrake 机器人舰队摄取通过与环境交互产生的大量流数据,远远超过那些可以轻松存储或传输的数据。同时,我们希望机器人团队能够通过在不同环境中的经验共同获得不同的技能。我们如何在无需传输或集中车队规模数据的情况下实现这种车队级学习在本文中,我们研究了策略的分布式学习作为潜在的解决方案。为了在分布式环境中有效地合并策略,我们提出了舰队合并,这是分布式学习的实例,它解释了由循环神经网络参数化的学习策略中可能出现的对称性。我们表明,舰队合并巩固了元世界环境中 50 项任务上训练的策略的行为,合并后的策略在测试时几乎在所有训练任务上都取得了良好的性能。 |
| Toward Scalable Visual Servoing Using Deep Reinforcement Learning and Optimal Control Authors Salar Asayesh, Hossein Sheikhi Darani, Mo chen, Mehran Mehrandezh, Kamal Gupta 基于经典像素的视觉伺服 VS 方法提供高精度,但由于优化非线性而受到有限的收敛区域的影响。基于现代深度学习的VS方法克服了传统的视觉问题,但缺乏可扩展性,需要在有限的场景上进行训练。本文提出了一种利用深度强化学习 DRL 和最优控制的混合 VS 策略,以增强收敛面积和可扩展性。我们方法的 DRL 组件分别处理表示和策略学习,以增强可扩展性、通用性、学习效率并简化领域适应。而且,优化的控制部分保证了较高的终点精度。我们的方法展示了使用 7 DOF 操纵器在高收敛速度和最小末端定位误差方面取得的显着成就。重要的是,它展示了跨 1000 多个不同场景的可扩展性。此外,我们还展示了其对以前未见过的数据集的泛化能力。最后,我们说明了我们的方法在现实世界中的适用性,强调了其通过单次域迁移学习在有噪声和遮挡的环境中的适应性。 |
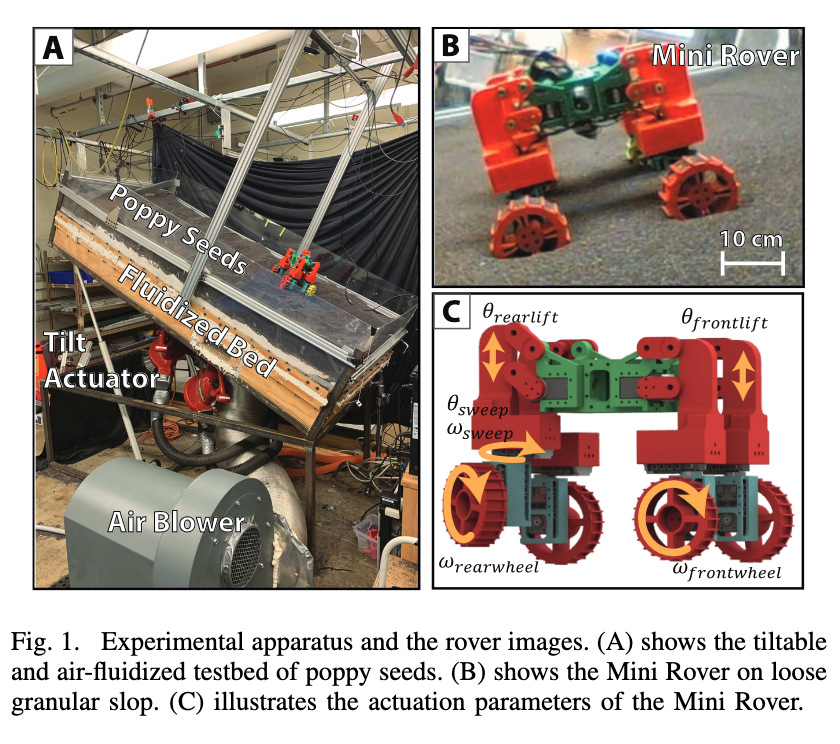
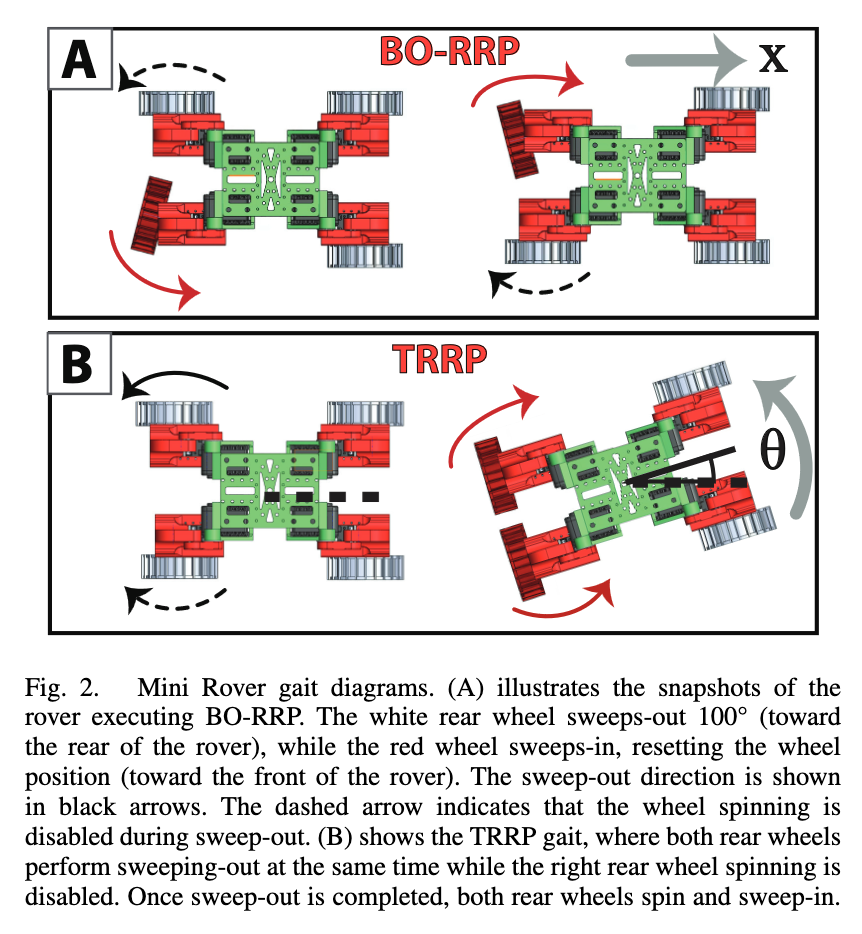
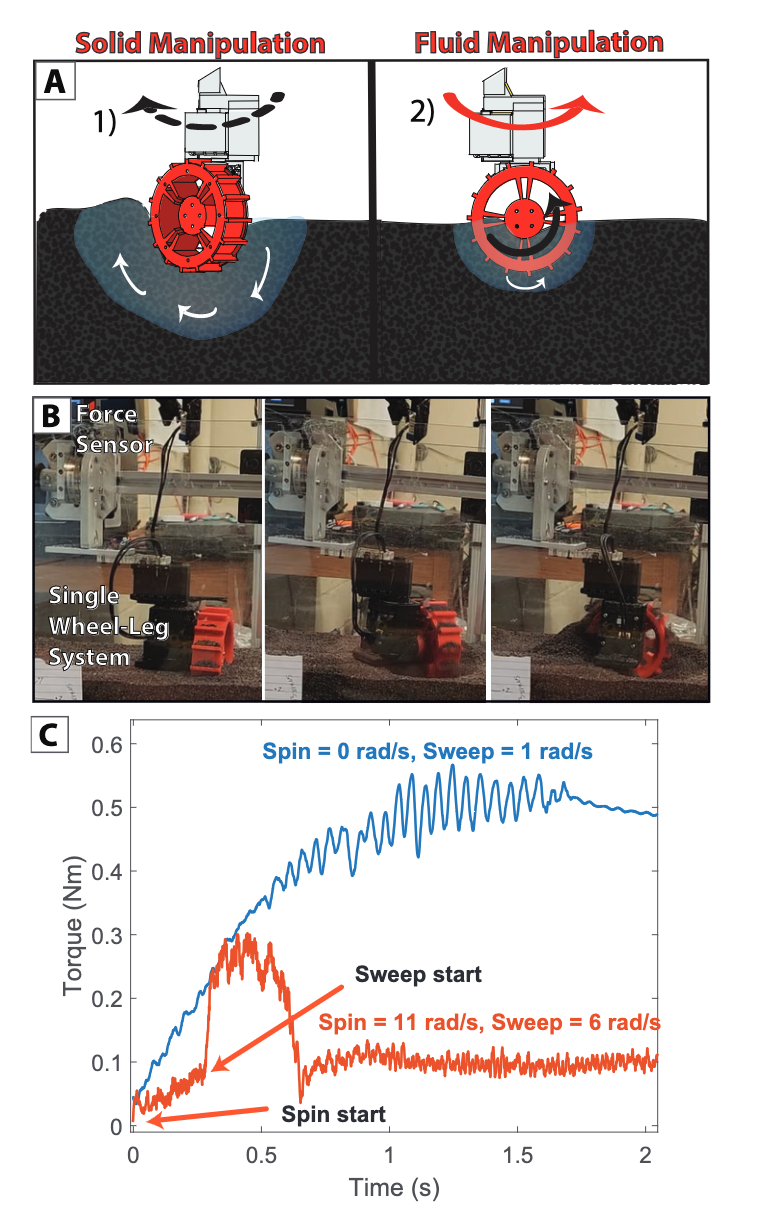
| Learning manipulation of steep granular slopes for fast Mini Rover turning Authors Deniz Kerimoglu, Daniel Soto, Malone Lincoln Hemsley, Joseph Brunner, Sehoon Ha, Tingnan Zhang, Daniel I. Goldman 未来的行星探索任务将需要到达具有挑战性的区域,例如陨石坑和陡坡。这些区域无处不在,并且存在丰富的科学目标,可能包含有关行星内部结构的信息。由低粘性风化层组成的陡坡在小扰动下容易向下流动,这使得自主漫游车的穿越变得非常具有挑战性。 |
| COIN-LIO: Complementary Intensity-Augmented LiDAR Inertial Odometry Authors Patrick Pfreundschuh, Helen Oleynikova, Cesar Cadena, Roland Siegwart, Olov Andersson 我们推出了 COIN LIO,一种 LiDAR 惯性里程计管道,它将 LiDAR 强度的信息与基于几何的点云配准紧密耦合。我们工作的重点是提高激光雷达惯性里程计在隧道或平坦场地等几何退化场景中的鲁棒性。我们将 LiDAR 强度返回投影为强度图像,并提出了一种图像处理管道,该管道可生成滤波后的图像,并提高图像内以及不同场景之间的亮度一致性。为了有效地利用强度作为附加模态,我们提出了一种新颖的特征选择方案,该方案可以检测点云配准中的无信息方向,并明确选择具有互补图像信息的补丁。然后将图像块中的光度误差最小化与迭代扩展卡尔曼滤波器中的惯性测量和点到平面配准融合。所提出的方法提高了公共数据集的准确性和稳健性。我们还发布了一个新的数据集,该数据集捕获了具有挑战性的几何退化场景中的五个现实世界环境。 |
| Vehicle Fuel Consumption Virtual Sensing from GNSS and IMU Measurements Authors Marcello Cellina, Silvia Strada, Sergio Matteo Savaresi 本文提出了一种独立于车辆的非侵入式光监控系统,用于根据安装在车辆内部的 GNSS 和 IMU 传感器及时连续获得的纵向速度和加速度来准确测量道路车辆的燃油消耗。在推动向零碳汽车过渡的同时,人们对用于精确测量仍在流通的许多内燃机汽车对环境影响的低成本仪器越来越感兴趣。这项工作的主要贡献是设计和比较两种创新的黑匣子算法,一种基于降低复杂性的物理建模,而另一种依靠前馈神经网络,仅使用速度和加速度测量来估计黑匣子燃油消耗。基于合适的指标,所开发的算法在瞬时和整体燃油消耗估计方面均优于最先进的最佳方法,相对于燃油流量地面实况的误差小于 1。用于模型识别、测试和实验验证的数据由 GNSS 速度和 IMU 加速度测量值组成,这些测量值是使用柴油车辆在不同道路、不同季节和不同乘客数量的多次行程中收集的。 |
| Graph-Theoretic Bézier Curve Optimization over Safe Corridors for Safe and Smooth Motion Planning Authors Soufyan Zayou, m r Arslan 作为参数化运动表示,B zier 曲线在多项式轨迹优化中具有重要应用,可用于各种机器人系统(包括飞行无人机、自动驾驶车辆和机器人操纵器)的安全、平稳运动规划。 B zier 曲线优化的一个重要组成部分是优化目标,因为它显着影响最终的机器人运动。众所周知,标准物理优化目标(例如最小化总速度、加速度、急动度和捕捉)可产生 B zier 曲线控制点的二次优化。在本文中,我们提出了一个统一的图论视角,使用基于交互图拉普拉斯导出的 B zier 控制点的一致距离来定义和理解 B zier 曲线优化目标。除了演示标准物理优化目标如何定义 B zier 控制点之间的共识距离之外,我们还引入几何和统计优化目标作为替代共识距离,使用有限差分和微分方差构建。为了比较这些优化目标,我们在凸多边形安全走廊上应用 B zier 曲线优化,这些安全走廊是围绕最大间隙最小长度参考路径自动构建的。我们提供了使用 B zier 矩阵运算对 B zier 曲线进行二次优化的显式解析公式。 |
| Trust-Aware Motion Planning for Human-Robot Collaboration under Distribution Temporal Logic Specifications Authors Pian Yu, Shuyang Dong, Shili Sheng, Lu Feng, Marta Kwiatkowska 最近的工作考虑了人机协作 HRC 的信任感知决策,重点是模型学习。在本文中,我们感兴趣的是使 HRC 系统能够完成使用涉及人类信任的时序逻辑指定的复杂任务。由于人类对机器人的信任是不可观测的,因此我们采用广泛使用的部分可观测马尔可夫决策过程 POMDP 框架来建模人类与机器人之间的交互。为了指定所需的行为,我们建议使用语法上安全的线性分布时序逻辑 scLDTL,这是一种在状态谓词以及部分可观察系统的置信状态上定义的逻辑。 scLDTL 中信念谓词的结合增强了其表达能力,同时引入了额外的复杂性。这也提出了新的挑战,因为必须在连续的无限信念空间上评估信念谓词。为了应对这一挑战,我们提出了一种解决最优策略综合问题的算法。首先,我们通过使用概率标记函数重新表述 POMDP 来增强 MDP 的置信度。然后,在概率标记的置信 MDP 和 scLDTL 公式的自动机翻译之间构建乘积置信 MDP。最后,我们表明,可以通过利用现有的基于点的值迭代算法并进行必要的修改来获得最优策略。 |
| Design, Modelling and Control of an Amphibious Quad-Rotor for Pipeline Inspection Authors Petar Durdevic, Shaobao Li, Daniel Ortiz Arroyo 定期检查对于保持废水管道状况良好至关重要。挑战在于管道内部空间狭窄且结构可能复杂。使用带有重型电缆的管道机器人的传统方法昂贵、耗时且难以操作。在这项工作中,我们开发了一种两栖系统,将四轴飞行器与水面飞行器相结合,创建了混合无人机浮动飞行器 HUAFV 。 HUAFV 的非线性动力学基于两种操作模式的动态模型进行建模。该模型通过实验和模拟进行了验证。根据开发模型设计和调整的 PI 控制器已在原型平台上实现。 |
| On Fulfilling the Exigent Need for Automating and Modernizing Logistics Infrastructure in India: Enabling AI-based Integration, Digitalization, and Smart Automation of Industrial Parks and Robotic Warehouses Authors Shaurya Shriyam, Prashant Palkar, Amber Srivastava 为了保持竞争力,中低收入国家中低收入国家需要拥抱工业 4.0 和物流 4.0。这需要政府层面的干预和政策制定,以激励优质产品解决方案并推动传统上抵制的经济部门的创新。在本立场文件中,我们支持建立智能工业园区 SIP,重点是提高运营效率,并将针对利基客户的中小微企业和初创企业聚集在一起,提供创新的工业 4.0 解决方案。 SIP 以及精心规划的机器人自动化技术的分阶段部署将有助于降低印度难以维持的物流成本。为了成功实施SIP,我们需要在SIP内实现制造资源和能力的有效配置。因此,我们强调工业园区高效资源利用、协作和技术采用对促进工业发展和经济增长的重要性。我们提倡使用基于云的网络物理系统在 SIP 中进行实时数据访问和分析。使用物联网基础设施对工厂车间、仓库和工业单位进行集中云监控将提高决策、效率和安全性。数字孪生 DT 是物理系统的网络复制品,可以在智能制造和分布式制造系统的仿真、优化和实时监控方面发挥重要作用。 |
| Multi-Sensor Terrestrial SLAM for Real-Time, Large-Scale, and GNSS-Interrupted Forest Mapping Authors Weria Khaksar, Rasmus Astrup 森林作为我们生态系统的重要组成部分,需要有效的监测和管理。然而,在大规模和 GNSS 中断的森林环境中进行实时森林清查长期以来一直是一项艰巨的挑战。在本文中,我们提出了一种新颖的解决方案,利用机器人和传感器融合技术来克服这些挑战,并以更高的准确性和效率实现实时森林清查。所提出的解决方案包括一种新的 SLAM 算法,仅通过 3D 激光雷达和 IMU 的连续扫描,即可创建大型林分的精确 3D 地图,并详细估计树木数量和相应的胸径。该方法利用分层无监督聚类算法来检测树木并从激光雷达点云测量 DBH。该算法可以在记录数据的同时运行,也可以在记录的数据集上运行。此外,由于所提出的快速特征提取和变换估计模块,记录的数据可以以比常见 SLAM 算法更高的频率馈送到 SLAM。通过使用手持式传感器平台和移动林业机器人进行现场数据收集来测试所提出的解决方案的性能。 |
| Software Reconfiguration in Robotics Authors Sven Peldszus, Davide Brugali, Daniel Str ber, Patrizio Pelliccione, Thorsten Berger 由于学术界经常声称重新配置至关重要,因此已经开发了许多重新配置方法,尤其是机器人系统的重新配置方法。因此,关于机器人技术的文献中有丰富的用于重新配置机器人系统的技术。然而,当与该领域的研究人员交谈时,对于重构到底是什么以及它与适应等其他概念的关系似乎没有达成共识。除了这个学术视角之外,机器人框架还提供了动态加载和卸载机器人应用程序部分的机制。虽然我们从学术角度对机器人重构的最新技术状况有一个模糊的了解,但我们缺乏从实践者角度对实践状况的了解。为了填补这一空白,我们通过识别和分析 98 篇相关论文,调查了有关机器人系统重新配置的文献,回顾了四种主要机器人框架如何支持重新配置,最后研究了 48 个机器人应用中重新配置的实现。当将现有技术与实践状态进行比较时,我们发现它们之间存在显着差异,特别是科学界关注复杂的结构重构,而在实践中仅广泛使用参数重构。 |
| ViPlanner: Visual Semantic Imperative Learning for Local Navigation Authors Pascal Roth, Julian Nubert, Fan Yang, Mayank Mittal, Marco Hutter 由于地形可穿越性的差异、障碍物的多样性以及快速决策的必要性,户外环境中的实时路径规划仍然对现代机器人系统提出挑战。现有的方法主要集中在几何导航解决方案上,该解决方案适用于结构化几何障碍,但在不同地形类型及其可供性的语义解释方面存在局限性。此外,这些方法无法识别可穿越的几何事件,例如楼梯。为了克服这些问题,我们引入了 ViPlanner,这是一种学习局部路径规划方法,可根据几何和语义信息生成局部规划。该系统使用命令式学习范式进行训练,根据规划任务目标对网络权重进行端到端优化。这种优化使用了语义成本图的可微公式,使规划者能够区分不同地形的可穿越性并准确识别障碍物。语义信息使用 RGB 颜色空间以 30 个类别表示,可以有效地对多个级别的可遍历性进行编码。我们证明规划者可以适应不同的现实世界环境,而不需要任何现实世界的培训。事实上,规划器纯粹是在模拟中进行训练的,从而能够生成高度可扩展的训练数据。实验结果表明,与纯粹基于几何的方法相比,抗噪声能力、零样本模拟到真实传输以及可遍历性成本降低了 38.02。 |
| BeBOP -- Combining Reactive Planning and Bayesian Optimization to Solve Robotic Manipulation Tasks Authors Jonathan Styrud, Matthias Mayr, Erik Hellsten, Volker Krueger, Christian Smith 人们越来越期望用于操作任务的机器人系统能够轻松配置以执行新任务。虽然在过去,机器人程序通常是静态编写并手动调整的,但当前更快的转换时间需要强大的、模块化的和可解释的解决方案,这些解决方案也允许机器人系统学习如何执行任务。我们提出了基于行为的贝叶斯优化和规划 BeBOP 方法,该方法结合了两种生成行为树的方法,我们使用反应式规划器构建结构,并通过贝叶斯优化学习特定参数。该方法在一组机器人操作基准上进行了评估,结果显示其性能优于最先进的强化学习算法,速度提高了 46 倍,同时较少依赖于奖励塑造。 |
| Autonomous Navigation of Micro Air Vehicles in Warehouses Using Vision-based Line Following Authors Ling Shuang Soh, Hann Woei Ho 在本文中,我们提出了一种基于视觉的室内微型飞行器 MAV 导航解决方案,主要关注其在自主仓库中的应用。我们的工作重点是利用单个相机作为主要传感器来执行检测、定位和路径规划等任务。为了实现这些目标,我们实施了 HSV 颜色检测和霍夫线变换,以在仓库环境中进行有效的线检测。将卡尔曼滤波器集成到我们的系统中使相机能够可靠地跟踪黄线。我们利用 ROS Noetic,通过在 Gazebo 11 平台上进行的各种 MAV 飞行测试来评估基于视觉的巡线算法的性能。这些模拟的结果证明了系统能够成功地在狭窄的室内空间中导航。我们提出的系统有可能显着降低劳动力成本并提高仓库运营的整体生产力。 |
| Simulation Assessment Guidelines towards Independent Safety Assurance of Autonomous Vehicles Authors Jim Cherian, Martin Slavik, Andrea Piazzoni, Roshan Vijay, Mohamed Azhar, Niels de Boer 本模拟评估指南文件是由 NTU CETRAN 自动驾驶测试研究卓越中心与新加坡陆路交通管理局 LTA 合作制定的公共指南文件。它的主要目的是帮助新加坡自动驾驶汽车开发人员准备他们的软件模拟并提供建议,以确保他们准备好根据评估人员和地方当局采用的 Milestone 测试框架对其虚拟模拟结果进行独立评估。 |
| Dynamic Manipulation of a Deformable Linear Object: Simulation and Learning Authors Qi Jing Chen, Timothy Bretl, Nghia Vuong, Quang Cuong Pham 我们证明,可以在模拟中学习开环策略,以动态操纵可变形线性物体 DLO,例如绳索、电线或电缆,可以由真实机器人执行,无需额外训练。我们的方法是通过将现有的最先进的 DLO 模型离散弹性杆与机器人模拟器 MuJoCo 集成来实现的。我们描述了这种集成是如何完成的,检查模拟中产生的验证结果是否与我们从物理分析中期望的结果相匹配,并应用策略优化来根据仅在使用机器人手臂投掷电线的模拟中收集的数据来训练开环策略正好位于两个障碍物之间。 |
| A Decentralized Cooperative Navigation Approach for Visual Homing Networks Authors Mohamed Rahouti, Damian Lyons, Senthil Kumar Jagatheesaperumal, Kaiqi Xiong 视觉导航是一种轻量级的视觉导航方法。给定存储的初始家庭位置信息,通过将存储的家庭信息与当前图像进行比较并提取运动矢量,可以从任何其他位置实现返回该位置的导航任务。限制视觉归航应用的一个挑战是,归航位置必须在机器人的视野范围内才能启动归航过程。因此,我们提出了一种区块链方法,用于在广泛的视觉导航领域为异构机器人团队提供视觉导航。由于它不需要地图数据结构,因此该方法对于计算量较小的机器人平台非常有用,并且由于它利用当前的视觉信息,因此它支持弹性和自适应路径选择。 |
| GRID: A Platform for General Robot Intelligence Development Authors Sai Vemprala, Shuhang Chen, Abhinav Shukla, Dinesh Narayanan, Ashish Kapoor 开发机器人和自主系统的机器智能能力是一个昂贵且耗时的过程。现有的解决方案是针对特定应用量身定制的,并且很难推广。此外,训练数据的稀缺增加了部署深度机器学习模型的复杂性。我们提出了一个通用机器人智能开发网格的新平台来解决这两个问题。该平台使机器人能够根据其身体能力、环境限制和目标来学习、组合和调整技能。该平台通过了解物理世界的基础模型解决机器人技术中的人工智能问题。 GRID 从一开始就被设计为可扩展,以适应新型机器人、车辆、硬件平台和软件协议。此外,模块化设计使各种深度机器学习组件和现有基础模型能够轻松用于更广泛的以机器人为中心的问题。 |
| Visual Temporal Fusion Based Free Space Segmentation for Autonomous Surface Vessels Authors Xueyao Liang, Hu Xu, Yuwei Cheng 自主水面舰艇 ASV 的使用正在迅速增长。对于安全、高效的地面自动驾驶,可靠的感知系统至关重要。此类系统使船舶能够感知周围环境并根据收集到的信息做出决策。在感知过程中,自由空间分割对于区分安全任务区和分割作业水道至关重要。然而,由于近岸反射干扰、复杂的水纹理以及水面条件引起的随机运动振动,ASV 在自由空间分割方面面临着特殊的挑战。为了应对这些挑战,我们提出了一种基于视觉时间融合的自由空间分割模型,以利用先前的视觉信息。此外,我们还引入了新的评估程序和基于轮廓位置的损失计算函数,它们更适合表面自由空间分割任务。所提出的模型和过程在连续视频分割数据集上进行了测试,并实现了高精度和稳健的结果。 |
| COMPOSER: Scalable and Robust Modular Policies for Snake Robots Authors Yuyou Zhang, Yaru Niu, Xingyu Liu, Ding Zhao 蛇形机器人在与环境的交互中表现出卓越的顺从性和适应性,反映了其自然同类的特征。虽然它们的超冗余和高维特性增加了这种适应性,但它们也给机器人控制带来了巨大的挑战。不要将蛇形机器人的超冗余和灵活性视为单纯的挑战,而是利用这些特征来增强控制策略层面的鲁棒性和普遍性,其中存在尚未开发的潜力。我们寻求制定一种控制策略,有效打破蛇形机器人的高维性,同时利用其冗余性。在这项工作中,我们将蛇形机器人视为模块化机器人,并将蛇形机器人的控制制定为协作多智能体强化学习 MARL 问题。蛇形机器人的每个部分都充当单独的代理。具体来说,我们采用了自我关注机制来增强代理之间的合作行为。提出了高水平的想象力政策,以提供额外的奖励来指导低水平的控制政策。我们用五种蛇形机器人任务验证了所提出的方法 COMPOSER,包括目标到达、爬墙、形状形成、管道穿越和方块推动。与集中式基线和四个模块化策略基线相比,COMPOSER 在所有任务中实现了最高的成功率。此外,我们在我们提出的方法中展示了针对模块损坏的增强的鲁棒性和显着优越的零样本泛化性。 |
| High-curvature, high-force, vine robot for inspection Authors Mija l Ja n Mendoza, Nicholas D. Naclerio, Elliot W. Hawkes 机器人的性能在工厂内外都取得了显着进步,但在严格约束的未知环境中,例如喷气发动机或人类心脏内部,当前的机器人还不太擅长。在管道镜或内窥镜无法到达的情况下,拆卸或手术的成本很高。一种受植物生长启发的有前途的检查设备是藤蔓机器人,它可以通过从尖端伸出来在杂乱的环境中导航。然而,这些藤蔓机器人目前在同时转向狭窄曲率和向环境施加巨大力量方面的能力受到限制。在这里,我们提出了一种受植物启发的转向方法,通过不对称地延长藤蔓机器人的一侧来实现高曲率和大作用力。我们的主要开发成果是推出一种极其各向异性的复合皱纹薄膜,其弹性模量在正交方向上相差 400 倍。该薄膜用作藤蔓机器人的主体,其方向可以轴向拉伸 120 度以上,但周向只能拉伸 3 度。通过添加受控层干扰,该薄膜实现了一种受植物启发的转向方法,其中机器人的圆周不可延伸,但侧面可以拉伸以允许转弯。这种转向方法和身体压力不会相互对抗,使机器人能够比以前的藤蔓机器人架构表现出更大的力和更小的曲率。 |
| Energy-Aware Route Planning for a Battery-Constrained Robot with Multiple Charging Depots Authors Ahmad Bilal Asghar, Pratap Tokekar 本文考虑了在具有多个充电站的环境中运行的电池受限机器人的能量感知路线规划。机器人有一个电池放电时间D,它最多应该每隔D个时间单位去一次充电站,以免电量耗尽。目标是最大限度地减少机器人的旅行时间,同时确保其访问环境中的所有任务位置。我们针对这个问题提出了一个 O log D 近似算法。我们还提出了对近似算法的启发式改进,并评估其在 TSPLIB 实例上的性能,将其与通过整数线性规划 ILP 获得的最佳解决方案进行比较。 |
| Object manipulation through contact configuration regulation: multiple and intermittent contacts Authors Orion Taylor, Neel Doshi, Alberto Rodriguez 在这项工作中,我们建立在通过接触配置调节来操纵未知物体的方法的基础上,对机器人、物体和环境之间所有接触的位置、几何形状和模式进行估计和控制。我们进一步开发了估计器和控制器,以实现通过更复杂的接触交互进行操作,包括机器人对象之间的间歇接触以及对象环境之间的多次接触。此外,我们在每个界面上支持更多的接触几何形状。这是通过基于因子图的估计框架来实现的,该框架对接触的互补运动学和扳手约束进行推理,以预测当前的接触配置。我们得到了有限数量的视觉反馈的帮助,当与可用的 FT 传感和机器人本体感觉相结合时,我们能够区分以前无法区分的接触模式。我们在我们的操纵平台上实现了这个改进的框架,并证明它允许机器人执行更广泛的操纵任务。这包括使用墙壁作为支撑来重新定向物体,或调节物体与地面之间的接触几何形状。最后,我们进行消融研究,以了解视觉和触觉反馈在我们的操纵框架中的贡献。 |
| A Preview of Open-Loop and Feedback Nash Trajectories in Racing Scenarios Authors Matthias Rowold 由于高度互动和竞争的环境,自动赛车的轨迹规划提出了特殊的挑战。先前的工作应用了博弈论,因为它为此类非合作动态问题提供了平衡。该贡献引入了一个框架来评估纳什均衡对赛车场景的适用性。为了实现这一目标,我们采用 iLQR 的变体(称为 iLQGame)来寻找满足原始游戏线性二次近似平衡条件的轨迹。我们特别对开环行为结果和反馈纳什均衡之间的差异感兴趣,并展示 iLQGame 如何生成这两种类型的均衡。 |
| Uncertainty-aware hybrid paradigm of nonlinear MPC and model-based RL for offroad navigation: Exploration of transformers in the predictive model Authors Faraz Lotfi, Khalil Virji, Farnoosh Faraji, Lucas Berry, Andrew Holliday, David Meger, Gregory Dudek 在本文中,我们研究了一种混合方案,该方案结合了非线性模型预测控制 MPC 和基于模型的强化学习 RL,用于在不依赖预定义地图的情况下在越野、非结构化地形上对自动驾驶模型汽车进行导航规划。我们的创新方法从 BADGR 中汲取灵感,BADGR 是一种基于 LSTM 的网络,主要专注于环境建模,但其独特之处在于用 Transformer 替换 LSTM 模块,从而大大提升了模型的性能。为了解决系统内的不确定性,我们训练预测模型的集合并估计模型权重和输出之间的互信息,通过引入可变速度促进动态视野规划。为了进一步增强我们的方法,我们采用了非线性 MPC 控制器,该控制器可以解释车辆模型和状态的复杂性。基于模型的 RL 面会产生转向角并量化固有的不确定性。同时,非线性 MPC 会建议最佳油门设置,在目标实现速度和管理受速度影响的模型不确定性之间取得平衡。在进行的研究中,我们的方法优于现有基线,在预测未来事件方面持续实现更高的指标值,并无缝集成车辆的运动学模型以增强决策。 |
| Model Validation of a Low-Speed and Reverse Driving Articulated Vehicle Authors Viral Gosar, Mohsen Alirezaei, Igo Besselink, Henk Nijmeijer 对于配送中心铰接式车辆的自主运行,车辆的精确定位至关重要。这些车辆的自动化带来了一些挑战,例如大扫掠路径、不对称的转向响应、非转向拖车轴的大滑动滑移角以及倒车时拖车的不稳定。因此,需要一个经过验证的车辆模型来准确有效地预测车辆的状态。与正向驱动不同,开环验证方法由于其动力学不稳定而不能用于铰接式车辆的反向驱动。本文提出了一种稳定系统不稳定极点的方法,并将三种车辆模型运动学、非线性单轨和多体动力学模型与配送中心低速实验获得的真实测试数据进行了比较。 |
| Efficient Constrained Dynamics Algorithms based on an Equivalent LQR Formulation using Gauss' Principle of Least Constraint Authors Ajay Suresha Sathya, Herman Bruyninckx, Wilm Decre, Goele Pipeleers 我们通过使用高斯最小约束原理制定等效线性二次调节器 LQR 问题并使用动态规划求解来导出一系列有效的约束动态算法。我们的方法建立在 Popov 和 Vereshchagin PV 开创性但基本上不为人知的 On m 2d m 3 求解器的基础上,其中 n、m 和 d 分别是关节数量、约束数量和运动树深度。我们为原始 PV 求解器提供了说明性推导,并将其扩展到浮动基础运动树,并在任何链接上都允许约束。我们在 LQR 的对偶 Hessian 矩阵和逆运算空间惯性矩阵 OSIM 之间建立了新的连接,从而允许高效的 OSIM 计算,我们使用矩阵求逆引理进一步加速了计算。通过推广消除顺序并考虑 MUJOCO 类型的软约束,我们推导出两个原始的 O n m 复杂度求解器。我们的数值结果表明,使用我们的算法可以显着提高四足机器人和类人机器人等高维机器人的仿真速度,因为它们的扩展性比 Featherstone 广泛使用的 O nd 2 m 2d d 2m LTL 算法更好。 |
| Active Implicit Reconstruction Using One-Shot View Planning Authors Hao Hu, Sicong Pan, Liren Jin, Marija Popovi , Maren Bennewitz 使用自主机器人重建主动物体正引起人们的极大兴趣。该任务的主要目标是在机载资源有限的情况下最大化要重建对象的信息。以前的视图规划方法效率低下,因为它们依赖于基于显式表示的迭代范式,包括:1 仅规划到下一个最佳视图的路径;2 需要大量在表面覆盖方面增益较小的视图。为了解决这些限制,我们将隐式表示集成到 One Shot View Planning OSVP 中。我们的方法背后的关键思想是使用隐式表示来获得小的缺失表面积,而不是用额外的视图来观察它们。因此,我们设计了一个名为 OSVP 的深度神经网络,在给定从初始稀疏观察细化的密集点云的情况下直接预测一组视图。为了训练我们的 OSVP 网络,我们使用通过隐式表示和集合覆盖优化问题细化的密集点云生成监督标签。模拟实验表明,我们的方法实现了足够的重建质量,在有限的视图和运动预算下优于几个基线。 |
| How Many Views Are Needed to Reconstruct an Unknown Object Using NeRF? Authors Sicong Pan, Liren Jin, Hao Hu, Marija Popovi , Maren Bennewitz 神经辐射场 NeRF 由于其卓越的内存效率和仅需要姿势 RGB 输入的要求,在在线主动对象重建方面获得了极大的兴趣。以前基于 NeRF 的视图规划方法表现出计算效率低下,因为它们依赖于迭代范例,包括 1 当新图像到达时重新训练 NeRF 和 2 仅规划到下一个最佳视图的路径。为了解决这些限制,我们提出了一种基于所需视图数量 PRV 预测的非迭代管道。我们的方法背后的关键思想是重建对象所需的视图数量取决于其复杂性。因此,我们设计了一个名为 PRVNet 的深度神经网络来预测所需的视图数量,使我们能够根据对象的复杂性定制数据采集并规划全局最短路径。为了训练 PRVNet,我们使用 ShapeNet 数据集生成监督标签。模拟实验表明,我们基于 PRV 的视图规划方法优于基线,实现了良好的重建质量,同时显着降低了移动成本和规划时间。 |
| Speed and Density Planning for a Speed-Constrained Robot Swarm Through a Virtual Tube Authors Wenqi Song, Yan Gao, Quan Quan 复杂环境下机器人群的规划与控制越来越受到人们的关注。为此,我们之前的工作中已经采用了虚拟管的想法。具体来说,规划了不同宽度的虚拟管道,以避免在复杂环境中与障碍物发生碰撞。本文在规划大量速度受限机器人虚拟管道的基础上,进一步规划虚拟管道沿线的平均前进速度和密度,以保证安全并提高效率。与现有方法相比,该方法基于全局信息,可应用于速度受限的机器人群穿越狭窄空间。数值模拟和实验表明,通过过程的安全性和效率得到提高。 |
| Active Anomaly Detection in Confined Spaces Using Ergodic Traversal of Directed Region Graphs Authors Benjamin Wong, Tyler M. Paine, Santosh Devasia, Ashis G. Banerjee 我们为开发分层控制估计框架迈出了第一步,以主动规划机器人轨迹以进行密闭空间中的异常检测。该空间使用有向区域图进行全局表示,其中区域是需要访问检查的地标。我们设计了一个快速混合马尔可夫链来找到遍历该图的遍历路线,使得区域访问频率与其异常检测不确定性成正比,同时满足边缘方向性区域转移约束 s 。 |
| Reinforcement learning adaptive fuzzy controller for lighting systems: application to aircraft cabin Authors Kritika Vashishtha, Anas Saad, Reza Faieghi, Fengfeng Xi 照明要求是主观的,一种灯光设置不可能适用于所有人。然而,在开发能够适应用户偏好的智能照明算法方面的工作却很少。为了解决这一差距,本文使用模糊逻辑和强化学习来开发自适应照明算法。特别是,我们使用领域知识开发了一个基线模糊推理系统 FIS。我们使用现有文献创建一个 FIS,该 FIS 根据环境条件(即每日眩光指数)以及用户信息(包括年龄、活动和睡眠类型)生成照明设置建议。通过反馈机制,用户与算法进行交互,根据他们的偏好纠正算法输出。我们将这些修正解释为对 Q 学习代理的奖励,该代理在线调整 FIS 参数以匹配用户偏好。我们在飞机机舱模型中实现该算法,并进行广泛的用户研究,以评估该算法的有效性并了解其学习行为。我们的实施结果表明,所开发的算法具有学习用户偏好的能力,同时成功适应各种环境条件和用户特征。并且可以处理各种环境条件和用户特征。 |
| Exploring Benchmarks for Self-Driving Labs using Color Matching Authors Tobias Ginsburg, Kyle Hippe, Ryan Lewis, Doga Ozgulbas, Aileen Cleary, Rory Butler, Casey Stone, Abraham Stroka, Ian Foster 将实验程序自动化与自主决策相结合的自动驾驶实验室 SDL 作为提高科学工作流程吞吐量的一种手段越来越受欢迎。识别与目标颜色相匹配的供应有色颜料的数量(颜色匹配问题)的任务提供了一个简单且灵活的 SDL 测试用例,因为它需要实验建议、样本创建和样本分析,这是自主发现应用程序中的三个常见组件。我们提出了一种针对颜色匹配问题的机器人解决方案,允许完全自主地执行颜色匹配协议。 |
| Automated Gait Generation For Walking, Soft Robotic Quadrupeds Authors Jake Ketchum, Sophia Schiffer, Muchen Sun, Pranav Kaarthik, Ryan L. Truby, Todd D. Murphey 由于软执行器的非线性动力学和高维输入空间,软机器人的步态生成具有挑战性。软机器人控制和感知的局限性迫使研究人员手工制作步态序列的开环控制器,这是一个不平凡的过程。此外,较短的软执行器寿命和执行器行为的自然变化将机器学习技术限制为可以在与机器人部署相同的时间尺度上学习的设置。最后,由于软机器人材料的异质性和非线性及其因磨损而导致的动力学变化,仿真并不总是可行。我们提出了一种高效、免模拟的示例方法,用于使用非常少的计算来自动生成软机器人步态。该技术在电动软四足机器人上进行了演示,该四足机器人使用由 16 个手剪切拉胀 HSA 执行器构成的四条腿行走。为了管理搜索空间的维度,步态由从 7 个可能的原语中选择的两组连续的腿部运动组成。一次在一条腿上执行一对基元,然后我们选择性能最好的一对来执行,同时继续执行后续腿。这种方法不使用模拟、复杂的计算或用户输入,在短短 4 分钟的硬件实验中一致地生成良好的平移和旋转步态,优于手工制作的步态。 |
| LANCAR: Leveraging Language for Context-Aware Robot Locomotion in Unstructured Environments Authors Chak Lam Shek, Xiyang Wu, Dinesh Manocha, Pratap Tokekar, Amrit Singh Bedi 机器人运动是一项具有挑战性的任务,尤其是在非结构化地形中。在实践中,通过在决策中使用所遇到地形的上下文信息,最佳运动策略可以是上下文相关的。人类可以为机器人解释环境背景,但人类语言的模糊性使得直接用于机器人运动具有挑战性。在本文中,我们提出了一种新颖的方法 LANCAR,它引入了上下文翻译器,该翻译器与强化学习 RL 代理配合使用以实现上下文感知运动。我们的公式允许机器人解释人类观察者或具有大型语言模型 LLM 的视觉语言模型 VLM 生成的环境中的上下文信息,并使用此信息生成上下文嵌入。我们将上下文嵌入与机器人的内部环境观察结合起来,作为 RL 代理决策神经网络的输入。我们使用不同模糊级别的上下文信息来评估 LANCAR,并使用几种替代方法来比较其性能。我们的实验结果表明,我们的方法在不同领域表现出良好的通用性和适应性,在情景奖励方面实现了至少 10 倍的性能提升。 |
| Expressing and Inferring Action Carefulness in Human-to-Robot Handovers Authors Linda Lastrico, Nuno Ferreira Duarte, Alessandro Carf , Francesco Rea, Alessandra Sciutti, Fulvio Mastrogiovanni, Jos Santos Victor 内隐沟通在社交交流中起着至关重要的作用,因此必须考虑它才能在人机交互中获得良好的体验。这项工作解决了与对象的物理属性检测、传输和操作相关的隐式通信。我们提出了一种生态方法,从人类物体操纵过程中发生的自然运动学的微妙调节来推断物体特征。同样,我们从人类策略中汲取灵感,塑造机器人运动,使其在追求行动目标的同时能够传达物体属性。在现实的 HRI 场景中,参与者将装满水或空的杯子交给机器人操纵器进行分类。我们实现了一个在线分类器来区分与杯子内容相关的小心或不小心的人体动作。我们将我们提出的表达控制器(根据杯子填充情况调节运动)与中性运动控制器进行了比较。结果表明,人体运动学在任务过程中根据杯子内容进行调整,甚至在伸手抓握运动时也是如此。此外,在行动完成之前,可以在线可靠地推断出移交满杯子的过程中的谨慎程度。 |
| Active-Perceptive Motion Generation for Mobile Manipulation Authors Snehal Jauhri, Sophie Lueth, Georgia Chalvatzaki 移动操纵 MoMa 系统结合了移动性和灵活性的优点,这要归功于它们可以移动并与环境互动的更大空间。当配备机载传感器(例如嵌入式摄像头)时,MoMa 机器人还可以持续感知周围环境。然而,在家庭等非结构化和杂乱的环境中提取任务相关的视觉信息仍然是一个挑战。在这项工作中,我们为移动操纵器引入了一种主动感知管道,以生成为操纵任务(例如在最初未知的杂乱场景中抓取)提供信息的运动。我们提出的方法 ActPerMoMa 以地平线后退的方式生成机器人轨迹,采样轨迹和计算路径明智的实用程序,通过最大化视觉信息增益和面向任务的目标来权衡重建未知场景,例如,通过有效地最大化抓取可达性来抓取成功。我们在模拟实验中展示了我们的方法的有效性,双臂 TIAGo MoMa 机器人在杂乱的场景中以及当其路径被外部障碍物阻挡时执行移动抓取。我们根据经验分析各种实用程序和超参数的贡献,并与有或没有主动感知目标的代表性基线进行比较。 |
| ConSOR: A Context-Aware Semantic Object Rearrangement Framework for Partially Arranged Scenes Authors Kartik Ramachandruni, Max Zuo, Sonia Chernova 对象重新排列是使机器人能够在复杂环境中识别正确的对象放置的问题。先前有关对象重新排列的工作已经探索了一组不同的技术,用于遵循用户指令以实现某些所需的目标状态。逻辑谓词、目标场景的图像和自然语言描述都被用来指导机器人如何排列物体。在这项工作中,我们认为,在部分布置的环境(例如常见的家庭环境)中,没有必要让用户承担指定目标场景的负担。相反,我们展示了来自部分排列场景的上下文线索,即环境中一些预先排列的对象的放置提供了足够的上下文,使机器人能够在没有任何明确的用户目标规范的情况下执行对象重新排列文本。我们引入了 ConSOR,一个上下文感知语义对象重排框架,它利用环境的部分排列初始状态的上下文线索来完成新对象的排列,而无需用户明确的目标指定。我们证明,ConSOR 在泛化到新颖的对象排列和未见过的对象类别方面远远优于两个基线。 |
| Neuroadaptation in Physical Human-Robot Collaboration Authors Avinash Singh, Dikai Liu, Chin Teng Lin 用于物理人机协作的机器人 pHRC 系统需要考虑多种因素来改变其行为和操作方式,例如人类同事的表现和意图以及不同人类同事在避免碰撞和机器人奇异性方面的能力手术。由于系统的导纳在整个工作空间中是可变的,一个潜在的解决方案是根据操作员的要求调整相互作用力并控制参数。为了克服这个问题,我们展示了一种新颖的 pHRC 闭环神经自适应框架。我们借助强化学习以闭环方式应用认知冲突信息,以适应机器人策略并将其与开环设置进行比较。实验结果表明,基于闭环的神经自适应框架成功降低了pHRC期间的认知冲突水平,从而提高了人机协作的流畅性和直观性。 |
| Obstacles and Opportunities for Learning from Demonstration in Practical Industrial Assembly: A Systematic Literature Review Authors V. Hernandez Moreno, S. Jansing, M. Polikarpov, M. G. Carmichael, J. Deuse 从示范中学习是应对重复工业装配中具有挑战性的长期趋势的最有前途的方法之一。它不仅提供了车间工人可以使用的编程技术,减少了对机器人专家的需求和相关成本,而且还为通过灵活和通用的系统从大规模生产到大规模定制的明显转变提供了可能的解决方案。自20世纪80年代示范学习理念出现以来,其方法、能力和成果不断发展。然而,尽管有报道称学术出版物不断取得进展,但这一概念尚未在整个装配行业中广泛出现。鉴于其巨大潜力,本文介绍了根据更新的系统评价首选报告项目 PRISMA 指南进行系统文献综述的结果。它旨在概述从为装配相关任务开发的演示解决方案中学习的最新技术,并对剩余障碍进行批判性讨论,以推动其朝着有意义的部署发展。该分析包括 2013 年至 2023 年期间来自 Scopus 和 Web of Science 数据库的总共 61 篇论文。研究结果表明,从演示中学习已经在研究环境中达到了显着的成熟度,彻底的实验成果证明了这一点,证明了其在工业装配应用中的巨大前景。 |
| Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments Authors Kehan Long, Khoa Tran, Melvin Leok, Nikolay Atanasov 本文解决了动态环境中刚体移动机器人安全导航的挑战。我们引入了一种解析方法来计算多边形和椭圆之间的距离,并用它来构造控制障碍函数 CBF 以实现安全控制综合。现有的移动机器人避障CBF设计方法通常假设点机器人或圆形机器人,这妨碍了它们适用于更现实的机器人身体几何形状。我们的工作使 CBF 设计能够捕获复杂的机器人和障碍物形状。 |
| Walking = Traversable? : Traversability Prediction via Multiple Human Object Tracking under Occlusion Authors Jonathan Tay Yu Liang, Kanji Tanaka 新兴的人类足迹平面图 PfH 技术通过预测遮挡楼层的可穿越性,在改善室内机器人导航方面具有巨大潜力。这项研究提出了一种创新方法,用安装在观察机器人上的第三人称视角单目相机取代第一人称视角传感器。这种方法可以收集多个人的测量结果,从而扩大了其应用范围。关键思想是使用两种类型的跟踪器(SLAM 和 MOT)来监视静止物体和移动人类并评估他们的交互。即使在具有挑战性的视觉场景中,例如遮挡、非线性透视、深度不确定性和涉及多人的交叉点,该方法也能实现稳定的可遍历性预测。此外,我们还扩展了地图质量指标以应用于可通行性地图,从而促进未来的研究。 |
| An Investigation of Multi-feature Extraction and Super-resolution with Fast Microphone Arrays Authors Eric T. Chang, Runsheng Wang, Peter Ballentine, Jingxi Xu, Trey Smith, Brian Coltin, Ioannis Kymissis, Matei Ciocarlie 在这项工作中,我们使用 MEMS 麦克风作为振动传感器来同时对纹理进行分类并估计接触位置和速度。振动传感器是人类和机器人触觉传感的一个重要方面,可快速检测接触和滑动的发生。麦克风是实现振动传感的一个有吸引力的选择,因为它们响应速度快,可以快速采样,价格实惠,并且占用空间非常小。我们的原型传感器仅使用嵌入弹性体下方的稀疏分布式 MEMS 麦克风阵列,间距为 8 × 9 毫米。我们使用基于变压器的架构进行数据分析,利用麦克风的高采样率在时间序列数据而不是单个快照上运行我们的模型。当排除最慢的拖动速度、接触定位的中值误差为 1.5 mm 以及接触速度的中值误差为 4.5 mm s 时,这种方法使我们能够在 4 类纹理分类上获得 77.3 的平均精度 84.2。我们表明,学习到的纹理和定位模型对于变化的速度具有鲁棒性,并且可以推广到不可见的速度。我们还报告说,我们的传感器提供快速接触检测,这是快速传感器的一个重要优势。 |
| NASU -- Novel Actuating Screw Unit: Origami-inspired Screw-based Propulsion on Mobile Ground Robots Authors Calvin Joyce, Jason Lim, Roger Nguyen, Michael Owens, Sara Wickenhiser, Elizabeth Peiros, Florian Richter, Michael C. Yip 基于螺旋的运动是一种在水、沙子和砾石等多种介质上进行运动的稳健方法。螺钉面临的挑战是其大量有影响力的设计参数,这些参数会影响不同环境下的运动性能。一个关键参数是攻角,也称为导程角。攻角对螺杆的性能有重大影响,因为它在效率和前进速度之间进行权衡。这种趋势在各种类型的媒体中都是一致的。在这项工作中,我们提出了一种新型驱动螺杆单元。它是第一个基于螺杆的推进设计,能够动态重新配置攻角,以优化跨多种介质的运动。该设计的灵感来自于折纸机器人中广泛使用的克雷斯林单元,攻角通过线性执行器进行调整,而整个单元作为阿基米德螺旋在其轴上旋转。 NASU 集成到移动测试台上,并在砾石、草地和沙子等多种介质中进行实验。 |
| Toward Optimal Tabletop Rearrangement with Multiple Manipulation Primitives Authors Baichuan Huang, Xujia Zhang, Jingjin Yu 在实践中,需要多种类型的操纵动作,例如拾取位置和推动来完成现实世界的操纵任务。然而,探索不同操纵动作的协同整合以最佳地解决长期任务和运动规划问题的研究有限。在本研究中,我们提出并研究了规划高质量的动作序列,以解决需要多个操作原语的长视野桌面重排任务。用多个操作原语 REMP 表示问题重排,我们开发了两种算法,分层最佳优先搜索 HBFS 和用于多原语重排 PMMR 的并行蒙特卡罗树搜索,以最佳地解决挑战。 |
| Cook2LTL: Translating Cooking Recipes to LTL Formulae using Large Language Models Authors Angelos Mavrogiannis, Christoforos Mavrogiannis, Yiannis Aloimonos 将烹饪食谱转化为机器人计划尤其具有挑战性,因为它们具有丰富的语言复杂性、时间上扩展的互连任务以及几乎无限的可能行动空间。我们的主要见解是,将背景烹饪领域知识的来源与能够处理烹饪食谱的时间丰富性的形式主义相结合,可以提取明确的机器人可执行计划。在这项工作中,我们使用线性时态逻辑 LTL 作为一种可表达的形式语言,足以对烹饪食谱的时间性质进行建模。利用预先训练的大型语言模型法学硕士,我们提出了一个系统,可以将互联网上找到的任意烹饪食谱的指令步骤转换为一系列 LTL 公式,将高级烹饪操作转化为一组可由操纵器执行的原始操作厨房环境。我们的方法利用缓存方案,在运行时动态构建可查询的操作库,与在运行时查询 LLM 以获取每个新遇到的操作的基线相比,显着减少了 LLM API 调用 51、延迟 59 和成本 42。 |
| Learning Generalizable Tool-use Skills through Trajectory Generation Authors Carl Qi, Sarthak Shetty, Xingyu Lin, David Held 有效利用工具的自主系统可以帮助人类完成许多常见任务,例如烹饪和清洁。然而,当前的系统在适应新工具方面未能达到人类的智力水平。先前基于可供性的工作通常会对环境做出强有力的假设,并且无法扩展到更复杂、联系丰富的任务。在这项工作中,我们应对这一挑战,并探索智能体如何学习使用以前未见过的工具来操纵可变形物体。我们建议学习工具的生成模型,使用轨迹作为点云序列,该模型可推广到不同的工具形状。给定任何新颖的工具,我们首先生成工具使用轨迹,然后优化工具姿势序列以与生成的轨迹对齐。我们为四种不同的具有挑战性的可变形对象操作任务训练一个模型。我们的模型仅使用来自每个任务的单个工具的演示数据进行训练,并且能够推广到各种新颖的工具,显着优于基线。 |
| Diver Identification Using Anthropometric Data Ratios for Underwater Multi-Human-Robot Collaboration Authors Jungseok Hong, Sadman Sakib Enan, Junaed Sattar 高效设计、感知算法和计算硬件方面的最新进展使得为自主水下航行器 AUV 创建改进的人机交互 HRI 功能成为可能。为了作为水下人类机器人团队执行安全任务,AUV 需要能够准确识别潜水员。然而,这仍然是一个悬而未决的问题,因为潜水员对视觉特征提出了挑战,这主要是由外观相似的潜水装备造成的。在本文中,我们提出了一种新颖的算法,可以使用预先训练的模型或在部署期间训练的模型来执行潜水员识别。我们利用从潜水员姿势估计中获得的人体测量数据来生成不受距离和光度条件变化影响的鲁棒特征。我们还提出了一种嵌入网络,可以最大化特征空间中的类间距离并最小化类内特征的距离,从而显着提高分类性能。此外,我们提出了一个在 AUV 上运行的端到端潜水员识别框架,并评估所提出算法的准确性。 |
| 3D Reconstruction in Noisy Agricultural Environments: A Bayesian Optimization Perspective for View Planning Authors Athanasios Bacharis, Konstantinos D. Polyzos, Henry J. Nelson, Georgios B. Giannakis, Nikolaos Papanikolopoulos 3D 重建是机器人技术的一项基本任务,由于其在农业、水下和城市环境等各种实际环境中的重大影响而受到关注。此任务的一个重要方法称为视图规划,是明智地将多个摄像机放置在能够最大化视觉信息的位置,从而改善最终的 3D 重建。为了避免对大量任意图像的需要,可以应用几何标准来选择更少但信息更丰富的图像,以显着提高 3D 重建性能。尽管如此,将各种现实世界场景中存在的环境噪声纳入这些标准可能具有挑战性,特别是在未提供有关噪声的先验信息时。为此,这项工作提倡一种新颖的几何函数来解释现有的噪声,仅依赖于相对少量的噪声实现,而不需要其封闭形式的表达。由于没有几何函数的解析表达式,这项工作提出了一种贝叶斯优化算法,用于在存在噪声的情况下进行精确的 3D 重建。 |
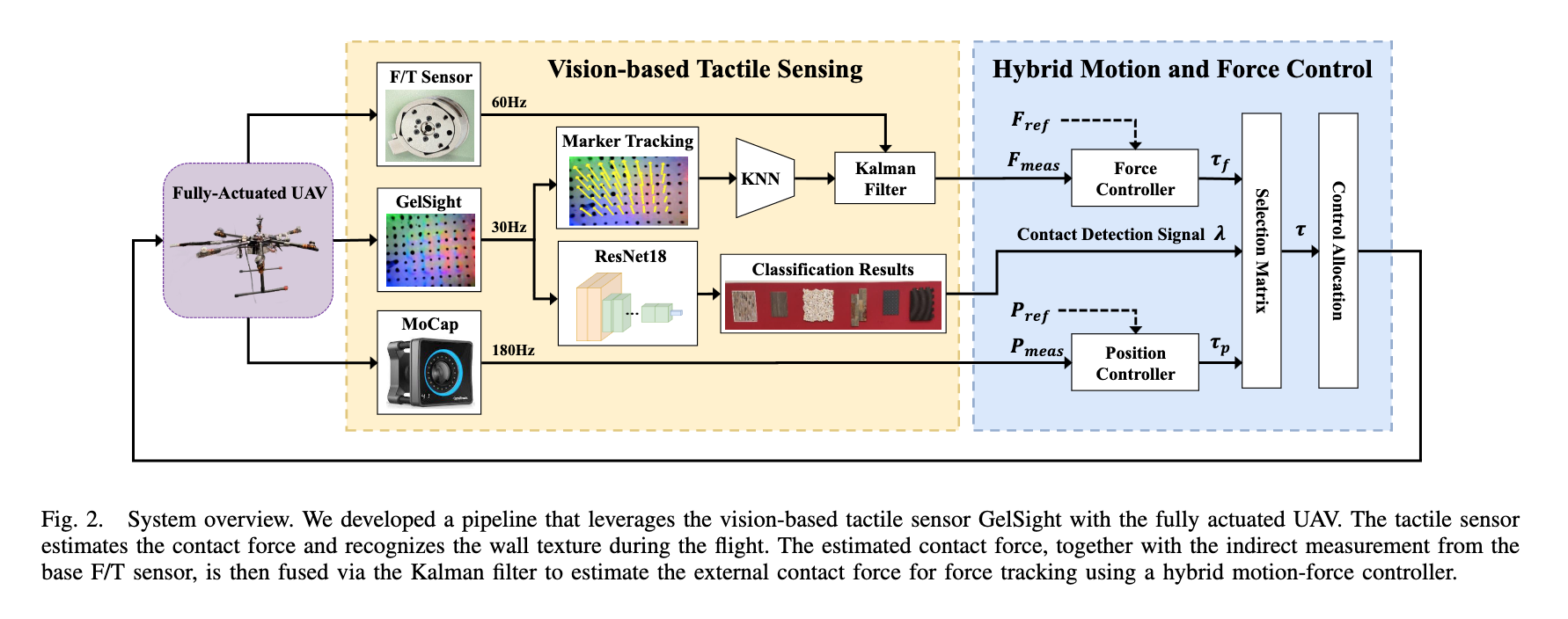
| Aerial Interaction with Tactile Sensing Authors Xiaofeng Guo, Guanqi He, Mohammadreza Mousaei, Junyi Geng, Guanya Shi, Sebastian Scherer 虽然自主无人飞行器无人机发展迅速,但大多数应用仅专注于被动视觉任务。空中交互旨在执行涉及物理交互的任务,这提供了一种协助人类进行高风险、高空作业的方法,从而减少成本、时间和潜在危险。然而,飞行器和机械臂之间的耦合动力学给精确控制带来了挑战。先前的研究通常采用位置控制(通常无法满足任务精度)或使用昂贵、笨重且笨重的力扭矩传感器(也缺乏本地语义信息)的力控制。相反,触觉传感器既经济又轻便,能够感知包括力分布在内的接触信息,并识别局部纹理。现有的触觉传感工作主要集中在准静态过程中的桌面操作任务。在本文中,我们率先在全驱动无人机上使用基于视觉的触觉传感器,以提高更动态的空中操纵任务的准确性。我们引入了一种利用触觉反馈通过混合运动力控制器进行实时力跟踪的管道,以及一种在空中交互期间进行墙壁纹理检测的方法。我们的实验表明,我们的系统可以有效地取代或补充传统的力扭矩传感器,与依赖单个传感器相比,使用融合力估计时,位置跟踪误差可提高约 16 倍的飞行性能。我们的触觉传感器在实时纹理识别和 100 次接触后的准确度达到 93.4。 |
| PEACE: Prompt Engineering Automation for CLIPSeg Enhancement in Aerial Robotics Authors Haechan Mark Bong, Rongge Zhang, Ricardo de Azambuja, Giovanni Beltrame 从工业机器人到太空机器人,安全着陆是飞行操作的重要组成部分。随着人们对人工智能的兴趣日益浓厚,我们将注意力转向基于学习的安全着陆方法。本文扩展了我们之前的工作 DOVESEI,该工作通过利用开放词汇图像分割的功能专注于反应式无人机系统。使用基于开放词汇的模型进行基于提示的安全着陆区分割不再只是一个想法,而且已被 DOVESEI 的工作证明是可行的。然而,启发式选择提示词并不是一个可靠的解决方案,因为它不能考虑不断变化的环境,并且如果给定的提示不能很好地表示观察到的环境,则可能会发生有害的后果。因此,我们引入了用于 CLIPSeg 增强的 PEACE Prompt Engineering Automation,为 DOVESEI 提供自动化提示生成和工程以适应数据分布变化的能力。我们的系统能够仅使用单目摄像机和图像分割在低至 20 米的高度执行安全着陆操作并避免碰撞。我们利用 DOVESEI 的动态焦点来避免视频流中帧之间地形分割的突然波动。与 CLIP 和 CLIPSeg 使用的标准提示相比,PEACE 在航拍图像的提示生成和工程方面显示出有希望的改进。与仅使用 DOVESEI 相比,结合 DOVESEI 和 PEACE,我们的系统能够将成功的安全着陆区选择提高 58.62。 |
| How to Model Brushless Electric Motors for the Design of Lightweight Robotic Systems Authors Ung Hee Lee, Tor Shepherd, Sangbae Kim, Avik De, Hao Su, Robert Gregg, Luke Mooney, Elliott Rouse 开发轻量、高性能机器人系统的关键一步是永磁无刷直流 BLDC 电机的建模和选择。典型的建模分析是先验完成的,并为正确确定应用的电机尺寸、指定所需的工作电压和电流以及评估热响应和其他设计属性(例如传动比)提供见解。然而,为了执行这些建模分析,需要有关电机特性的正确信息,这些信息通常从制造商数据表中获得。通过我们自己的经验以及与制造商的沟通,我们注意到 BLDC 电机建模缺乏清晰度和标准化,再加上电机数据表中使用的模糊或不一致的术语,情况更加复杂。本教程的目的是简明地描述设计过程中使用的 BLDC 电机分析的控制方程,并强调因使用不当而可能出现的潜在错误。我们提出了从相和线到线参考系到熟悉的 q 轴直流电机表示的功率不变转换,这提供了三相 BLDC 电机的有刷模拟,便于分析和设计。我们强调潜在的错误,包括绕组电阻热损耗的不正确计算、通过电机扭矩常数对电机扭矩的不正确估计以及所需总线电压或由此产生的角速度限制的不正确估计。附录中为设计人员提供了一组统一且精简的控制方程。 |
| Multi-Objective Sparse Sensing with Ergodic Optimization Authors Ananya Rao, Howie Choset 我们考虑一个搜索问题,其中机器人具有一种或多种类型的传感器,每种传感器适合检测不同类型的目标或目标信息。通常,可能的目标位置或感兴趣的位置的分布形式的信息可用于指导搜索。当存在多种类型的信息时,那么每种信息的分布也必须存在,从而使得利用这些分布来指导搜索的搜索问题成为多目标的问题。在本文中,我们考虑当使用传感器的成本有限时的多目标搜索问题。为此,我们利用遍历度量,该度量促使代理在与预期信息量成比例的区域中花费时间。我们定义了多目标稀疏传感遍历 MO SS E 度量,以便优化每个传感器测量的时间和地点,同时规划平衡多个目标的轨迹。我们观察到,随着采样数量的大幅下降,我们的方法仍保持了覆盖性能。 |
| OriWheelBot: An origami-wheeled robot Authors Jie Liu, Zufeng Pang, Zhiyong Li, Guilin Wen, Zhoucheng Su, Junfeng He, Kaiyue Liu, Dezheng Jiang, Zenan Li, Shouyan Chen, Yang Tian, Yi Min Xie, Zhenpei Wang, Zhuangjian Liu 受折纸启发的机器人具有多种优点,例如重量轻、需要较少的组装以及表现出卓越的变形能力,受到了广泛而持续的关注。然而,现有的折纸机器人通常功能有限,开发功能丰富的机器人非常具有挑战性。在这里,我们报告了一款折纸轮式机器人 OriWheelBot,具有可变宽度和出色的沙地行走多功能性。 OriWheelBot 能够在障碍物上调整轮宽的能力是通过 Miura 折纸制成的折纸轮实现的。还开发了一个名为 iOriWheelBot 的改进版本,可以自动判断障碍物的宽度。根据障碍物之间通道的宽度,进行直接通过、变宽通过、直接返回三种动作。我们确定了两种运动机制,即挖沙和推沙,后者更有利于在沙子上行走。我们系统地研究了许多沙地行走特征,包括负重、爬坡、在斜坡上行走以及穿越沙坑、小岩石和沙坑。 OriWheelBot的宽度可以改变40°,在平坦的沙地上的承载比为66.7,并且可以爬上17度的沙坡。 |
| Artificial Empathy Classification: A Survey of Deep Learning Techniques, Datasets, and Evaluation Scales Authors Sharjeel Tahir, Syed Afaq Shah, Jumana Abu Khalaf 从过去的十年开始,机器学习 ML 和辅助发育机器人 ADR 领域的研究人员对人工同理心 AE 产生了兴趣,将其作为人类机器人交互 HRI 的未来可能的范例。人类从出生起就学会了同理心,因此,将这种意识灌输给机器人和智能机器是具有挑战性的。然而,通过大量数据和时间的训练,机器人在某种程度上模仿同理心是可能的。 AE 的训练技术以及同理心人工智能研究领域的发现一直在不断发展。人工同理心的标准工作流程包括三个阶段:1 使用从视频或文本数据中检索到的特征进行情感识别 ER;2 分析感知到的情绪或同理心程度以选择最佳行动方案;3 执行响应行动。最近的研究表明 AE 与虚拟代理或机器人一起使用通常包括深度学习 DL 技术。例如,VGGFace 等模型用于进行 ER。像自动编码器这样的半监督模型会生成相应的情绪状态和行为反应。然而,还没有任何研究提出评估 AE 或反应共情程度的独立方法。本文旨在调查和评估现有的测量和评估同理心的工作,以及迄今为止收集和使用的数据集。我们的目标是通过比较 AE 领域最先进的方法的性能来突出并促进它们的使用。 |
| Dataset Generation for Drone Optimal Placement Using Machine Learning Authors Jialin Hao TSP 无人机正日益成为通信系统中一种有前景的工具。本报告解释了数据集的生成细节,该数据集将用于设计无人机辅助车载网络 DAVN 中无人机最佳放置的算法。我们的目标是在我们之前的工作之后提高无人机的通信和能源效率。该报告的组织方式如下:第一部分致力于使用排队理论对 DAVN 中的车辆请求进行延迟分析;报告的第二部分对无人机的能耗进行建模;第三部分解释了模拟场景和数据集特征。 |
| Dynamic Multimodal Locomotion: A Quick Overview of Hardware and Control Authors Shreyansh Pitroda 双足机器人是一类令人着迷且先进的机器人,旨在模仿人类的形态和运动。双足机器人的发展是机器人技术的一个重要里程碑。然而,即使是最先进的双足机器人也容易受到地形、障碍物谈判、有效负载和重量分布以及跌倒后恢复能力变化的影响。这些问题可以通过引入推进器来避免。推进器将使机器人能够在各种不平坦的地形上保持稳定。机器人可以轻松避开障碍物,并且在绊倒后能够恢复。 Harpy 是一款双足机器人,有 6 个关节和 2 个推进器,作为实现先进控制算法的硬件平台。本论文探讨了制造鹰身女妖硬件,使整个系统既轻又坚固。此外,它还通过仿真结果来展示推进器辅助行走,最后展示了在实际硬件上实现的固件和通信网络开发。 |
| Automated machine vision control system for technological nodes assembly process Authors Nikolay Shtabel, Mikhail Saramud, Stepan Tkachev, Iakov Pikalov 本文讨论了小型航天器组装自动化控制系统的创建先决条件、技术解决方案和实施。分析了系统的硬件和软件实现,该系统提供对各个工作场所各个单元的装配过程的控制和记录。本文提出了通过使用特殊算法来形成和处理技术标记来降低对用于控制装配技术的设备的要求的解决方案,特别是使用分辨率较低的相机。提供了一种工具,允许您控制螺纹连接的拧紧扭矩,并根据给定的算法通过无线控制限制拧紧扭矩。 |
| GPT-Driver: Learning to Drive with GPT Authors Jiageng Mao, Yuxi Qian, Hang Zhao, Yue Wang 我们提出了一种简单而有效的方法,可以将 OpenAI GPT 3.5 模型转变为自动驾驶车辆的可靠运动规划器。运动规划是自动驾驶的核心挑战,旨在规划安全舒适的驾驶轨迹。现有的运动规划器主要利用启发式方法来预测驾驶轨迹,但这些方法在面对新奇和未见过的驾驶场景时表现出不足的泛化能力。在本文中,我们提出了一种新的运动规划方法,该方法利用了大型语言模型法学硕士固有的强大推理能力和泛化潜力。我们方法的基本见解是将运动规划重新表述为语言建模问题,这是以前未探讨过的观点。具体来说,我们将规划器的输入和输出表示为语言标记,并利用 LLM 通过坐标位置的语言描述生成驾驶轨迹。此外,我们提出了一种新颖的提示推理微调策略来激发法学硕士的数字推理潜力。通过这种策略,法学硕士可以用自然语言描述高精度的轨迹坐标及其内部决策过程。我们在大规模 nuScenes 数据集上评估了我们的方法,并且广泛的实验证实了我们基于 GPT 的运动规划器的有效性、泛化能力和可解释性。 |
| DriveGPT4: Interpretable End-to-end Autonomous Driving via Large Language Model Authors Zhenhua Xu, Yujia Zhang, Enze Xie, Zhen Zhao, Yong Guo, Kenneth K.Y. Wong, Zhenguo Li, Hengshuang Zhao 过去十年,自动驾驶在学术界和工业界都得到了快速发展。然而,其有限的可解释性仍然是一个尚未解决的重大问题,严重阻碍了自动驾驶汽车的商业化和进一步发展。以前使用小语言模型的方法由于缺乏灵活性、泛化能力和鲁棒性而未能解决这个问题。最近,多模态大语言模型法学硕士因其通过文本处理和推理非文本数据(例如图像和视频)的能力而受到了研究界的广泛关注。在本文中,我们提出了 DriveGPT4,这是一种利用法学硕士的可解释的端到端自动驾驶系统。 DriveGPT4能够解释车辆动作并提供相应的推理,并回答人类用户提出的各种问题以增强交互。此外,DriveGPT4 以端到端方式预测车辆低电平控制信号。这些功能源于专为自动驾驶设计的定制视觉指令调整数据集。据我们所知,DriveGPT4 是第一个专注于可解释的端到端自动驾驶的作品。当对传统方法和视频理解法学硕士进行多项任务评估时,DriveGPT4 表现出了卓越的定性和定量性能。此外,DriveGPT4 可以以零射击方式进行推广,以适应更多未见过的场景。 |
| H-InDex: Visual Reinforcement Learning with Hand-Informed Representations for Dexterous Manipulation Authors Yanjie Ze, Yuyao Liu, Ruizhe Shi, Jiaxin Qin, Zhecheng Yuan, Jiashun Wang, Huazhe Xu 人类的双手拥有非凡的灵巧性,长期以来一直是机器人操作的灵感来源。在这项工作中,我们提出了一个人类 textbf H 和 textbf In 形成的视觉表示学习框架,以通过强化学习解决困难的 textbf Dex terous 操作任务 textbf H InDex。我们的框架由三个阶段组成:i 使用 3D 人体手势估计预训练表示,ii 使用自监督关键点检测进行离线适应表示,以及 iii 使用指数移动平均 BatchNorm 进行强化学习。最后两个阶段总共只修改预训练表示的 0.36 个参数,确保预训练的知识得到充分保留。我们根据经验研究了 12 种具有挑战性的灵巧操作任务,发现 H InDex 很大程度上超越了强大的基线方法和最近的运动控制视觉基础模型。 |
| GenSim: Generating Robotic Simulation Tasks via Large Language Models Authors Lirui Wang, Yiyang Ling, Zhecheng Yuan, Mohit Shridhar, Chen Bao, Yuzhe Qin, Bailin Wang, Huazhe Xu, Xiaolong Wang 收集大量现实世界交互数据来训练一般机器人策略通常成本高昂,因此激发了模拟数据的使用。然而,由于提出和验证新任务需要人力,现有的数据生成方法通常关注场景级别的多样性,例如对象实例和姿势,而不是任务级别的多样性。这使得在模拟数据上训练的策略难以展示重要的任务级别泛化能力。在本文中,我们建议通过利用大型语言模型LLM基础和编码能力来自动生成丰富的模拟环境和专家演示。我们的方法被称为 GenSim,有两种模式:目标导向生成,其中目标任务被赋予 LLM,LLM 提出一个任务课程来解决目标任务;以及探索性生成,其中 LLM 从先前的任务中引导并迭代地提出新的任务有助于解决更复杂任务的任务。我们使用 GPT4 将现有基准扩展十倍,达到 100 多个任务,并在这些任务上进行监督微调并评估多个 LLM,包括微调的 GPT 和针对机器人模拟任务的代码生成的 Code Llama。此外,我们观察到法学硕士生成的模拟程序在用于多任务策略训练时可以显着增强任务级别的泛化能力。我们进一步发现,通过最小的模拟到真实的适应,在 GPT4 生成的模拟任务上预训练的多任务策略表现出更强的迁移到现实世界中看不见的长期任务,并且比基线高 25 。 |
| [Re] CLRNet: Cross Layer Refinement Network for Lane Detection Authors Viswesh N, Kaushal Jadhav, Avi Amalanshu, Bratin Mondal, Sabaris Waran, Om Sadhwani, Apoorv Kumar, Debashish Chakravarty 以下工作是用于车道检测的 CLRNet 跨层细化网络的可重复性报告。基本代码由作者提供。该论文提出了一种新颖的跨层细化网络,利用高级和低级特征进行车道检测。 |
| Distributed end-effector formation control for mixed fully- and under-actuated manipulators with flexible joints Authors Zhiyu Peng, Bayu Jayawardhana, Xin Xin 存在故障或驱动不足的机械手可能会破坏机械手团队的末端执行器编队保持。基于两个连杆平面机械臂,我们研究了具有柔性关节的完全混合和欠驱动机械臂的末端执行器队形保持问题。在这种情况下,欠驱动操纵器可以包括有源无源AP操纵器、无源有源PA操纵器或其组合。我们为不同类型的机械手提出了分布式控制律,以实现并保持末端执行器所需的形成形状。这是通过将虚拟弹簧分配给完全驱动的末端执行器和欠驱动的虚拟末端执行器来实现的。我们进一步研究了网络机械手末端执行器的所有所需且可到达的形状集。 |
| PC-NeRF: Parent-Child Neural Radiance Fields under Partial Sensor Data Loss in Autonomous Driving Environments Authors Xiuzhong Hu, Guangming Xiong, Zheng Zang, Peng Jia, Yuxuan Han, Junyi Ma 重建大规模 3D 场景对于自动驾驶汽车至关重要,尤其是在部分传感器数据丢失的情况下。尽管最近开发的神经辐射场 NeRF 在隐式表示方面显示出了引人注目的结果,但使用部分丢失的 LiDAR 点云数据进行大规模 3D 场景重建仍需要探索。为了弥补这一差距,我们提出了一种新颖的 3D 场景重建框架,称为父子神经辐射场 PC NeRF。该框架包括两个模块,即父 NeRF 和子 NeRF,以同时优化场景级、片段级和点级场景表示。通过利用子 NeRF 的分段级表示功能,可以更有效地利用传感器数据,即使观察有限,也可以快速获得场景的近似体积表示。经过大量实验,我们提出的 PC NeRF 被证明可以在大规模场景中实现高精度 3D 重建。此外,PC NeRF可以有效解决部分传感器数据丢失的情况,并且在训练时间有限的情况下具有较高的部署效率。 |
| HOH: Markerless Multimodal Human-Object-Human Handover Dataset with Large Object Count Authors Noah Wiederhold, Ava Megyeri, DiMaggio Paris, Sean Banerjee, Natasha Kholgade Banerjee 我们提出了 HOH 人体对象人体移交数据集,这是一个包含 136 个对象的大型对象计数数据集,以加速数据驱动的移交研究、人类机器人移交实施以及根据人交互的 2D 和 3D 数据估计移交参数的人工智能 AI。 HOH 包含多视图 RGB 和深度数据、骨架、融合点云、抓握类型和惯用手标签、对象、给予者手和接收者手 2D 和 3D 分割、给予者和接收者舒适度评级以及配对对象元数据和对齐的 2,720 个 3D 模型跨越 136 个对象和 20 个给予者接收者对 40 的切换交互,由 40 个参与者组织角色逆转。我们还展示了使用 HOH 训练的神经网络执行抓取、定向和轨迹预测的实验结果。作为唯一完全无标记的切换捕获数据集,HOH 代表了自然的人类切换交互,克服了需要特定身体跟踪且缺乏高分辨率手部跟踪的标记数据集的挑战。 |
| Safety-Critical Control of Nonholonomic Vehicles in Dynamic Environments using Velocity Obstacles Authors Aurora Haraldsen, Martin S. Wiig, Aaron D. Ames, Kristin Y. Pettersen 本文考虑了具有一阶非完整约束、保持非零前进速度、在动态环境中移动的车辆的碰撞避免。我们利用控制障碍函数 CBF 的概念来综合优先考虑安全的控制输入,其中安全标准源自速度障碍原理。用于避免碰撞的 CBF 的现有实例(例如,基于保持最小距离)可能会产生使车辆停止甚至倒车的控制输入。所提出的公式有效地将速度控制与转向分开,使车辆能够在不影响安全性的情况下保持向前运动。这有利于确保车辆向其期望的目的地前进,而且这也是某些车辆(例如船舶和固定翼无人机)的基本要求。 |
| Diff-DOPE: Differentiable Deep Object Pose Estimation Authors Jonathan Tremblay, Bowen Wen, Valts Blukis, Balakumar Sundaralingam, Stephen Tyree, Stan Birchfield 我们引入了 Diff DOPE,这是一种 6 DoF 姿态细化器,它将图像、对象的 3D 纹理模型和对象的初始姿态作为输入。该方法使用可微渲染来更新物体姿态,以最小化图像和模型投影之间的视觉误差。我们证明,这个简单但有效的想法能够在姿势估计数据集上实现最先进的结果。我们的方法与最近的方法不同,其中姿势细化器是在大型合成数据集上训练的深度神经网络,用于将输入映射到细化步骤。相反,我们使用可微分渲染可以让我们完全避免训练。我们的方法以不同的随机学习率并行执行多个梯度下降优化,以避免对称对象、相似外观或错误步长的局部最小值。可以使用各种模式,例如 RGB、深度、强度边缘和对象分割掩模。 |
| Better Situational Graphs by Inferring High-level Semantic-Relational Concepts Authors Jose Andres Millan Romera, Hriday Bavle, Muhammad Shaheer, Martin R. Oswald, Holger Voos, Jose Luis Sanchez Lopez 最近的 SLAM 工作利用更高层次的语义概念扩展了姿态图,利用它们之间的关系,不仅提供了更丰富的情境环境表示,而且还提高了其估计的准确性。具体来说,我们之前的工作 Situational Graphs S Graphs 是在因子优化过程中联合利用语义关系的先驱,它依赖于诸如墙壁表面和房间之类的语义实体,其关系是通过数学定义的。然而,仅依赖于较低级别的因子图来摘录这些高级概念仍然是一个挑战,并且目前是使用临时算法来完成的,这限制了其包含新的语义关系概念的能力。为了克服这一限制,在这项工作中,我们提出了一种图神经网络 GNN,用于学习可以从低级因子图推断出的高级语义关系概念。我们已经证明,我们可以推断房间实体及其与映射墙面的关系,比基线算法更准确、计算效率更高。此外,为了证明我们方法的多功能性,我们提供了一个新的语义概念,即墙及其与墙面的关系。我们提出的方法已集成到 S Graphs 中,并且已在模拟和真实数据集中得到验证。 |
| Proceedings of the Third Workshop on Agents and Robots for reliable Engineered Autonomy Authors Angelo Ferrando University of Genoa, Italy , Rafael Cardoso University of Aberdeen, United Kingdom 该卷包含 2023 年可靠工程自治领域第三届代理和机器人研讨会的会议记录,该研讨会与 2023 年第 26 届欧洲人工智能会议 ECAI 同期举行。它探索了自主代理和机器人技术的融合,强调代理在具有物理交互的现实世界场景中的实际应用。该研讨会强调了机器人系统中增强自主性和可靠行为的日益重要性以及对新颖验证和确认方法的需求。其主要目标是促进这些领域的研究人员之间的合作,旨在解决自主机器人系统中的复杂挑战。 |
| Robust Integral Consensus Control of Multi-Agent Networks Perturbed by Matched and Unmatched Disturbances: The Case of Directed Graphs Authors Jose Guadalupe Romero, David Navarro Alarcon 这项工作提出了一种为扰动双积分器系统设计共识控制器的新方法,该系统的互连由包含有根生成树的有向图描述。我们提出了新的鲁棒控制器来解决系统受到匹配和不匹配干扰影响时的一致性和同步问题。在这两个问题中,我们提出了简单的连续控制器,其积分作用使我们能够处理干扰。提出了一种基于李雅普诺夫直接方法的、针对未扰动网络系统的严格稳定性分析。 |
| Implicit collaboration with a drawing machine through dance movements Authors Itay Grinberg, Alexandra Bremers, Louisa Pancoast, Wendy Ju 在本次演示中,我们展示了一系列正在进行的探索性工作的初步结果,研究了创造性机器通过运动作为一种隐式交互形式与人们进行交流和协作的潜力。该论文描述了一个 Wizard of Oz 演示,其中隐藏的向导控制 AxiDraw 绘图机器人,而参与者则与其协作绘制自定义明信片。 |
| Adversarial Driving Behavior Generation Incorporating Human Risk Cognition for Autonomous Vehicle Evaluation Authors Zhen Liu, Hang Gao, Hao Ma, Shuo Cai, Yunfeng Hu, Ting Qu, Hong Chen, Xun Gong 近年来,自动驾驶汽车评估已成为工业界和学术界日益关注的话题。本文重点开发一种新颖的框架,用于生成干扰自动驾驶汽车的背景车辆的对抗性驾驶行为,以揭露有效且合理的风险事件。具体来说,对抗行为是通过强化学习 RL 方法与累积前景理论 CPT 相结合来学习的,该方法允许代表人类风险认知。然后,提出了深度确定性策略梯度DDPG技术的扩展版本,用于训练对抗性策略,同时利用CPT动作价值函数确保训练稳定性。 |
| PID Optimization Using Lagrangian Mechanics Authors Ethan Kou, Majid Moghadam 创建系统模拟可以在不需要物理系统的情况下调整控制系统。在本文中,我们采用拉格朗日力学推导出一组方程来模拟购物车上的倒立摆。该系统由连接到推车上的自由旋转杆组成,通过向推车施加正确的力来实现杆的平衡。我们手动调整比例积分微分控制器 PID 的比例、积分和微分增益系数来平衡杆。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com
相关文章:
【AI视野·今日Robot 机器人论文速览 第四十六期】Tue, 3 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Tue, 3 Oct 2023 Totally 76 papers 👉上期速览✈更多精彩请移步主页 Interesting: 📚Aerial Interaction with Tactile, 无人机与触觉的结合,实现空中交互与相互作用。(from CMU) website&#…...

macOS三种软件安装目录以及环境变量优先级
一、系统自带应用 这些软件(以git为例)位于根目录下的/usr/bin/xxx,又因为系统级环境变量文件/etc/paths已指定了命令查找位置: /usr/local/bin /System/Cryptexes/App/usr/bin /usr/bin /bin /usr/sbin /sbin所以这些自带应用可…...

嵌入式Linux裸机开发(一)基础介绍及汇编LED驱动
系列文章目录 文章目录 系列文章目录前言IMX6ULL介绍主要资料IO表现形式 汇编LED驱动原理图初始化流程时钟设置IO复用设置电气属性设置使用GPIO 编写驱动编译程序编译.o文件地址链接.elf格式转换.bin反汇编(其他) 综合成Makefile完成一步编译烧录程序imx…...
企业微信机器人对接GPT
现在网上大部分微信机器人项目都是基于个人微信实现的,常见的类库都是模拟网页版微信接口。 个人微信作为我们自己日常使用的工具,也用于支付场景,很怕因为违规而被封。这时,可以使用我们的企业微信机器人,利用企业微信…...
【数据结构】排序(1) ——插入排序 希尔排序
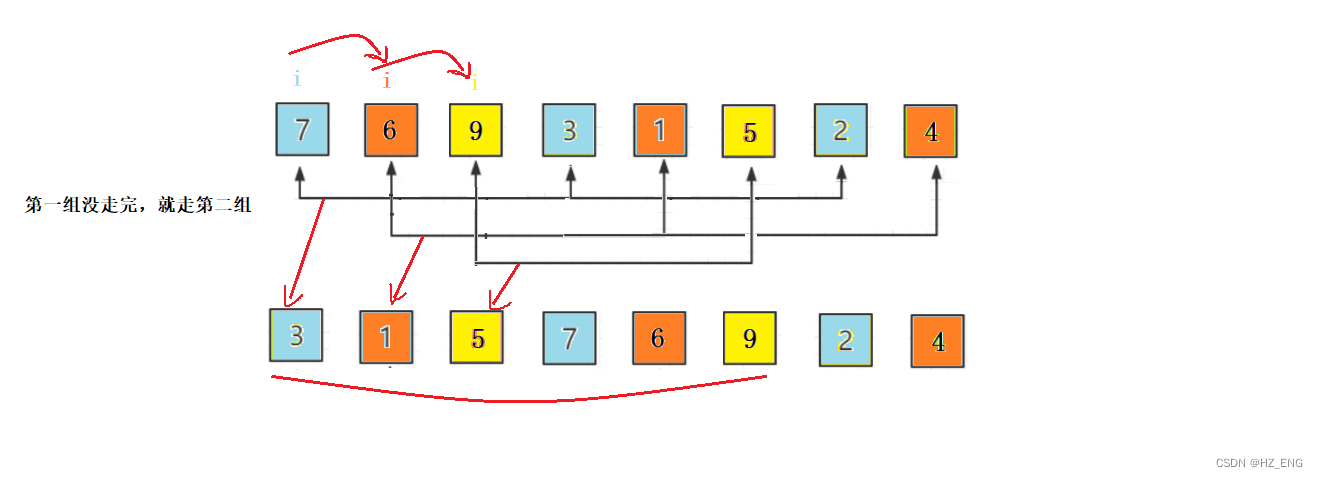
目录 一. 直接插入排序 基本思想 代码实现 时间和空间复杂度 稳定性 二. 希尔排序 基本思想 代码实现 时间和空间复杂度 稳定性 一. 直接插入排序 基本思想 把待排序的记录按其关键码值的大小依次插入到一个已经排好序的有序序列中,直到所有的记录插入完为止&…...

Python 列表推导式深入解析
Python 列表推导式深入解析 列表推导式是 Python 中的一种简洁、易读的方式,用于创建列表。它基于一个现有的迭代器(如列表、元组、集合等)来生成新的列表。 基本语法: 列表推导式的基本形式如下: [expression for…...

信息学奥赛一本通-编程启蒙3103:练18.3 组别判断
3103:练18.3 组别判断 时间限制: 1000 ms 内存限制: 65536 KB 提交数: 1963 通过数: 1418 【题目描述】 信息学课上要同学分组做期末报告,分组的方式为依座号顺序,每 3个人一组。如:1, 2, 3 为第一组,4, …...

C++ primer plus--探讨 C++ 新标准
18 探讨 C 新标准 18.1 复习前面介绍过的 C11 功能 (1)C11 扩大了列表初始化的适用范围,使用初始化列表时,可以不加等号。 int x {5}; float y {1.1}; short arr[5] {1, 2, 3, 4, 5}; int* ar new int[4] {1, 2, 3, 4}; vect…...

2023版 STM32实战6 输出比较(PWM)包含F407/F103方式
输出比较简介和特性 -1-只有通用/高级定时器才能输出PWM -2-占空比就是高电平所占的比例 -3-输出比较就是输出不同占空比的信号 工作方式说明 -1-1- PWM工作模式 -1-2- 有效/无效电平 有效电平可以设置为高或低电平,是自己配置的 周期选择与计算 周期重…...
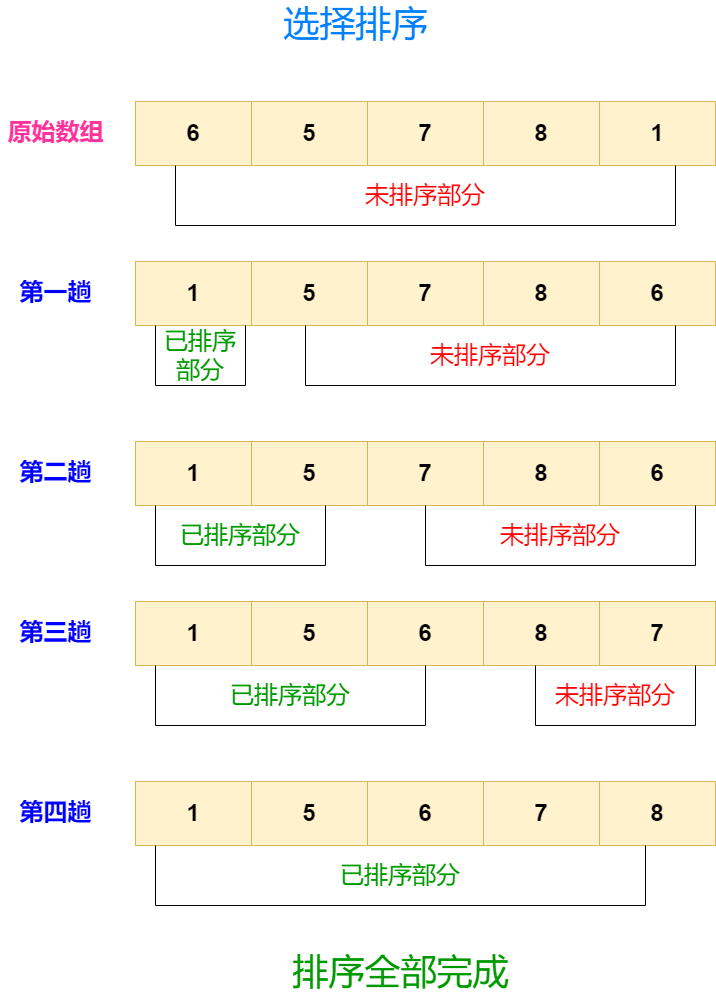
选择排序算法:简单但有效的排序方法
在计算机科学中,排序算法是基础且重要的主题之一。选择排序(Selection Sort)是其中一个简单但非常有用的排序算法。本文将详细介绍选择排序的原理和步骤,并提供Java语言的实现示例。 选择排序的原理 选择排序的核心思想是不断地从…...
安卓教材学习
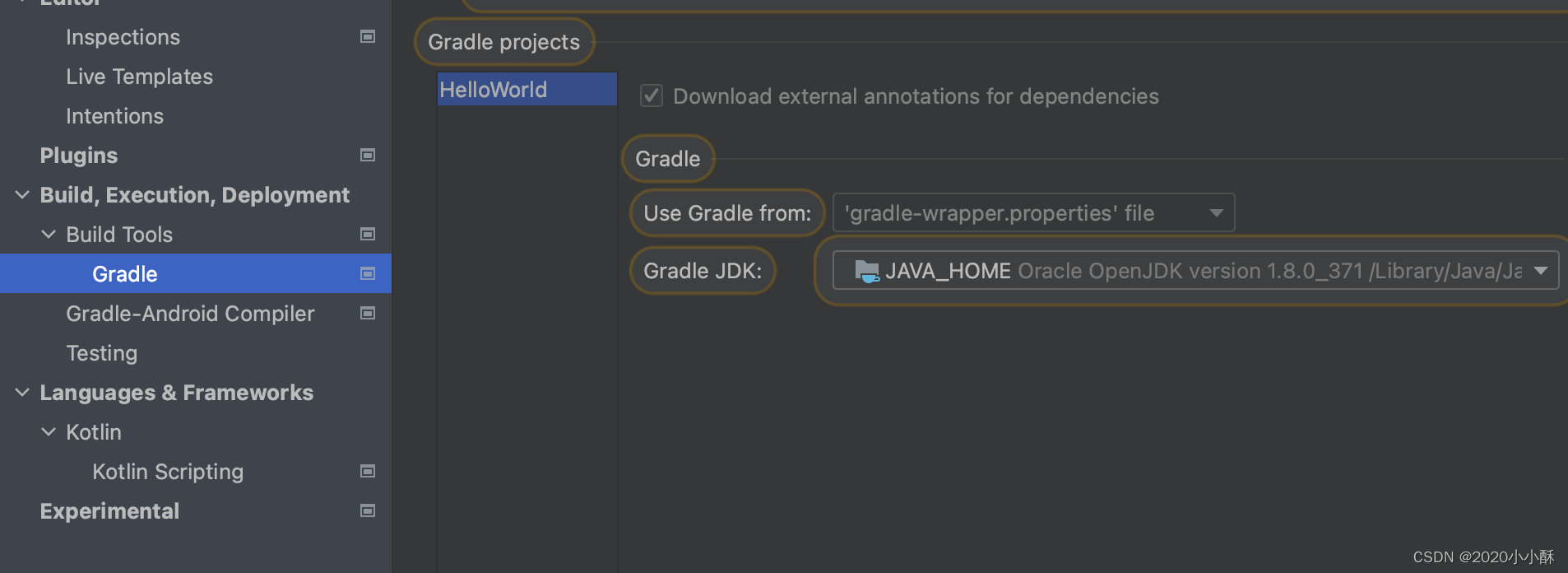
文章目录 教材学习第一行代码 Android 第3版环境配置gradle配置下载包出现问题 教材学习 摘要:选了几本教材《第一行代码 Android 第3版》,记录一下跑案例遇到的问题,和总结一些内容。 第一行代码 Android 第3版 环境配置 gradle配置 gradl…...
C++设计模式-生成器(Builder)
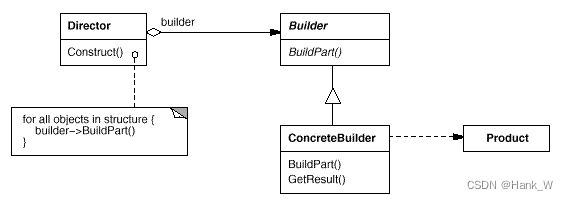
目录 C设计模式-生成器(Builder) 一、意图 二、适用性 三、结构 四、参与者 五、代码 C设计模式-生成器(Builder) 一、意图 将一个复杂对象的构建与它的表示分离,使得同样的构建过程可以创建不同的表示。 二、…...

CTFHUB - SSRF
目录 SSRF漏洞 攻击对象 攻击形式 产生漏洞的函数 file_get_contents() fsockopen() curl_exec() 提高危害 利用的伪协议 file dict gopher 内网访问 伪协议读取文件 端口扫描 POST请求 总结 上传文件 总结 FastCGI协议 CGI和FastCGI的区别 FastCGI协议 …...
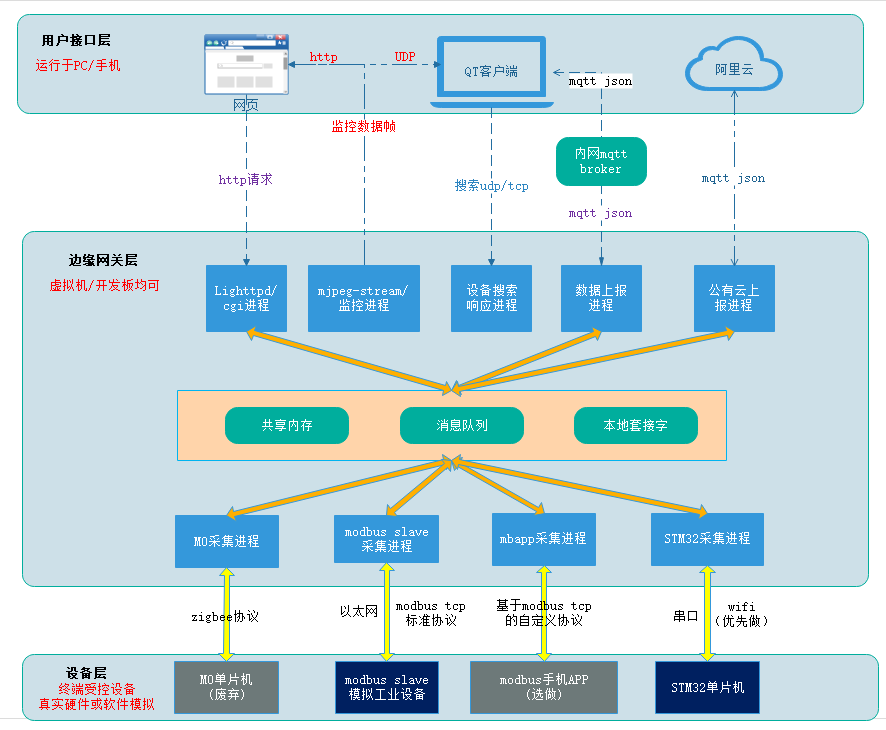
边缘计算网关
一、项目整体框架图 二、项目整体描述 边缘计算网关项目主要实现了智能家居场景和工业物联网场景下设备的数据采集和控制。 整个项目分为三大层:用户接口层、网关层、设备层。 其中用户层通过QT客户端、WEB界面及阿里云提供数据展示和用户接口。 网关使用虚拟机代替…...
1800_vim的宏录制功能尝试
全部学习信息汇总: GreyZhang/editors_skills: Summary for some common editor skills I used. (github.com) 最近5年多来,我emacs的编辑器用的还是比较多的。我的配置基本上是一个spacemacs,然后根据自己的需求增加了一丁点儿的其他配置。而…...

Ultra-Fast-Lane-Detection-v2 {后处理优化}//参考
采用三次多项式拟合生成的anchor特征点,在给定的polyfit_draw函数中,degree参数代表了拟合多项式的度数。 具体来说,当我们使用np.polyfit函数进行数据点的多项式拟合时,我们需要指定一个度数。这个度数决定了多项式的复杂度。例…...

【面试题精讲】Java静态方法和实例方法有何不同?
★ 有的时候博客内容会有变动,首发博客是最新的,其他博客地址可能会未同步,认准https://blog.zysicyj.top ” 首发博客地址[1] 面试题手册[2] 系列文章地址[3] Java 中的静态方法和实例方法在使用和行为上有一些不同之处。 调用方式不同: 静…...
【数据结构】布隆过滤器
布隆过滤器的提出 在注册账号设置昵称的时候,为了保证每个用户昵称的唯一性,系统必须检测你输入的昵称是否被使用过,这本质就是一个key的模型,我们只需要判断这个昵称被用过,还是没被用过。 方法一:用红黑…...

linux基础4---内存
1、什么是内存泄漏,怎么解决内存泄漏? 在嵌入式Linux中,内存泄漏是指由于疏忽或错误,导致一些对象或资源无法被垃圾回收器回收,从而导致内存占用不断增加,最终导致设备性能下降。内存泄漏对程序的影响很大,可能会导致应用程序变慢、崩溃或者消耗大量的内存,最终导致设…...

图论---拓扑排序
概念 一个有向图,如果图中有入度为 0 的点,就把这个点删掉,同时也删掉这个点所连的边。一直进行上面的处理,如果所有点都能被删掉,则这个图可以进行拓扑排序。拓扑排序是对DAG(有向无环图)上的节…...

【Oracle APEX开发小技巧12】
有如下需求: 有一个问题反馈页面,要实现在apex页面展示能直观看到反馈时间超过7天未处理的数据,方便管理员及时处理反馈。 我的方法:直接将逻辑写在SQL中,这样可以直接在页面展示 完整代码: SELECTSF.FE…...
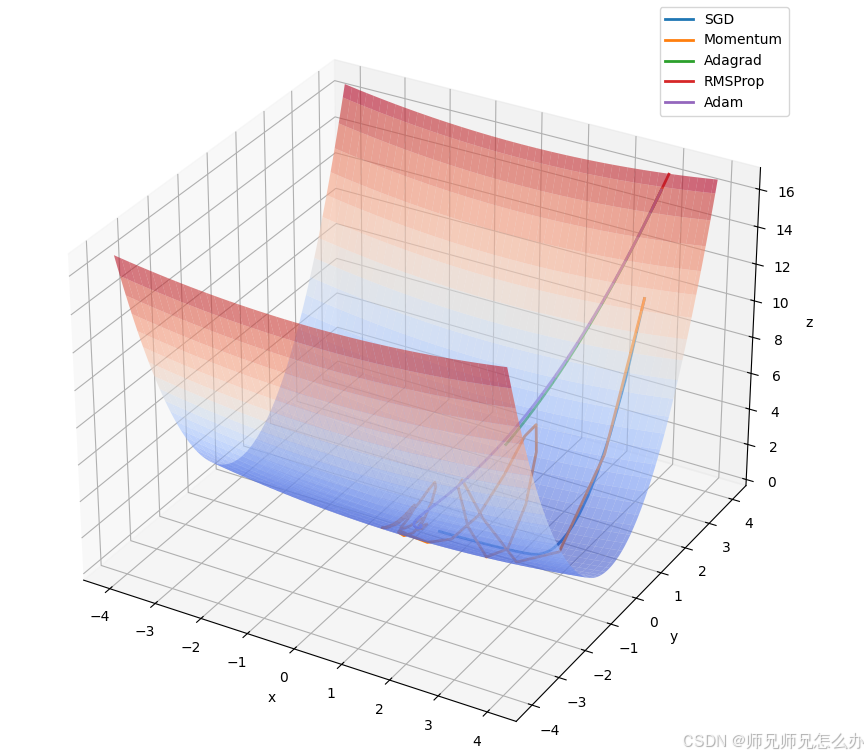
【人工智能】神经网络的优化器optimizer(二):Adagrad自适应学习率优化器
一.自适应梯度算法Adagrad概述 Adagrad(Adaptive Gradient Algorithm)是一种自适应学习率的优化算法,由Duchi等人在2011年提出。其核心思想是针对不同参数自动调整学习率,适合处理稀疏数据和不同参数梯度差异较大的场景。Adagrad通…...

高危文件识别的常用算法:原理、应用与企业场景
高危文件识别的常用算法:原理、应用与企业场景 高危文件识别旨在检测可能导致安全威胁的文件,如包含恶意代码、敏感数据或欺诈内容的文档,在企业协同办公环境中(如Teams、Google Workspace)尤为重要。结合大模型技术&…...
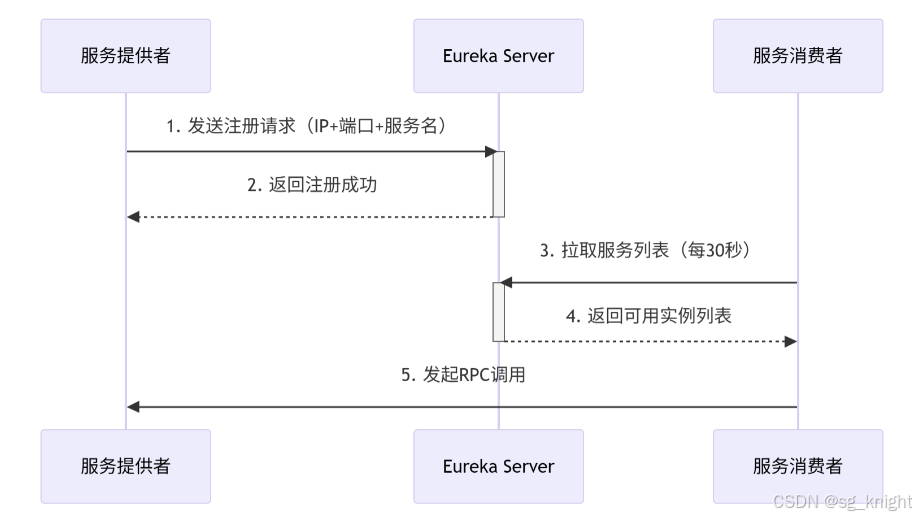
Springcloud:Eureka 高可用集群搭建实战(服务注册与发现的底层原理与避坑指南)
引言:为什么 Eureka 依然是存量系统的核心? 尽管 Nacos 等新注册中心崛起,但金融、电力等保守行业仍有大量系统运行在 Eureka 上。理解其高可用设计与自我保护机制,是保障分布式系统稳定的必修课。本文将手把手带你搭建生产级 Eur…...
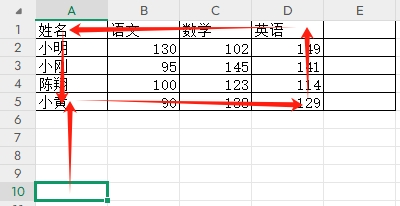
3-11单元格区域边界定位(End属性)学习笔记
返回一个Range 对象,只读。该对象代表包含源区域的区域上端下端左端右端的最后一个单元格。等同于按键 End 向上键(End(xlUp))、End向下键(End(xlDown))、End向左键(End(xlToLeft)End向右键(End(xlToRight)) 注意:它移动的位置必须是相连的有内容的单元格…...

Aspose.PDF 限制绕过方案:Java 字节码技术实战分享(仅供学习)
Aspose.PDF 限制绕过方案:Java 字节码技术实战分享(仅供学习) 一、Aspose.PDF 简介二、说明(⚠️仅供学习与研究使用)三、技术流程总览四、准备工作1. 下载 Jar 包2. Maven 项目依赖配置 五、字节码修改实现代码&#…...
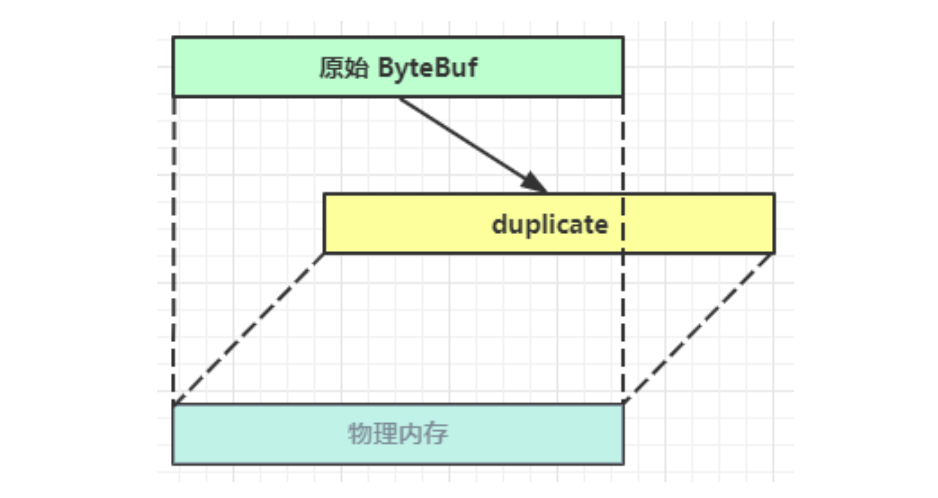
Netty从入门到进阶(二)
二、Netty入门 1. 概述 1.1 Netty是什么 Netty is an asynchronous event-driven network application framework for rapid development of maintainable high performance protocol servers & clients. Netty是一个异步的、基于事件驱动的网络应用框架,用于…...

Go语言多线程问题
打印零与奇偶数(leetcode 1116) 方法1:使用互斥锁和条件变量 package mainimport ("fmt""sync" )type ZeroEvenOdd struct {n intzeroMutex sync.MutexevenMutex sync.MutexoddMutex sync.Mutexcurrent int…...

js 设置3秒后执行
如何在JavaScript中延迟3秒执行操作 在JavaScript中,要设置一个操作在指定延迟后(例如3秒)执行,可以使用 setTimeout 函数。setTimeout 是JavaScript的核心计时器方法,它接受两个参数: 要执行的函数&…...
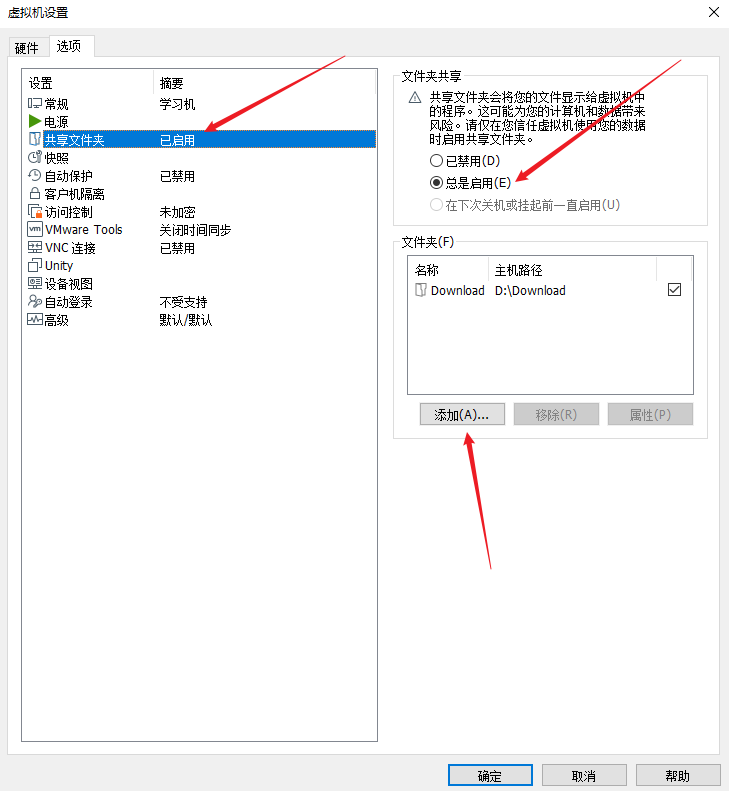
Linux操作系统共享Windows操作系统的文件
目录 一、共享文件 二、挂载 一、共享文件 点击虚拟机选项-设置 点击选项,设置文件夹共享为总是启用,点击添加,可添加需要共享的文件夹 查询是否共享成功 ls /mnt/hgfs 如果显示Download(这是我共享的文件夹)&…...