DRM全解析 —— plane详解(1)
本文参考以下博文:
Linux内核4.14版本——drm框架分析(5)——plane分析
特此致谢!
1. 简介
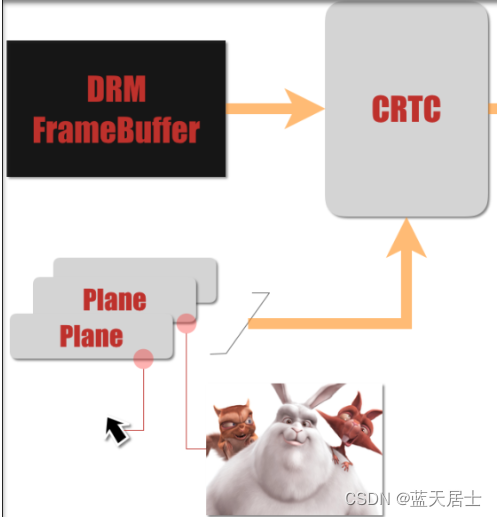
一个plane代表一个image layer(硬件图层),最终的image由一个或者多个plane(s)组成。plane和 Framebuffer 一样是内存地址。plane主要包括以下3种类型:
- DRM_PLANE_TYPE_PRIMARY:主要图层,通常用于仅支持RGB格式的简单图层
- DRM_PLANE_TYPE_OVERLAY:叠加图层,通常用于YUV格式的视频图层
- DRM_PLANE_TYPE_CURSOR:光标图层,一般用于pc系统,用于显示鼠标
2. 核心结构
在Linux内核的DRM中,plane对应的核心结构体为:struct drm_plane。该结构体在include/drm/drm_plane.h中定义,代码如下(Linux内核版本:6.1):
/*** struct drm_plane - central DRM plane control structure** Planes represent the scanout hardware of a display block. They receive their* input data from a &drm_framebuffer and feed it to a &drm_crtc. Planes control* the color conversion, see `Plane Composition Properties`_ for more details,* and are also involved in the color conversion of input pixels, see `Color* Management Properties`_ for details on that.*/
struct drm_plane {/** @dev: DRM device this plane belongs to */struct drm_device *dev;/*** @head:** List of all planes on @dev, linked from &drm_mode_config.plane_list.* Invariant over the lifetime of @dev and therefore does not need* locking.*/struct list_head head;/** @name: human readable name, can be overwritten by the driver */char *name;/*** @mutex:** Protects modeset plane state, together with the &drm_crtc.mutex of* CRTC this plane is linked to (when active, getting activated or* getting disabled).** For atomic drivers specifically this protects @state.*/struct drm_modeset_lock mutex;/** @base: base mode object */struct drm_mode_object base;/*** @possible_crtcs: pipes this plane can be bound to constructed from* drm_crtc_mask()*/uint32_t possible_crtcs;/** @format_types: array of formats supported by this plane */uint32_t *format_types;/** @format_count: Size of the array pointed at by @format_types. */unsigned int format_count;/*** @format_default: driver hasn't supplied supported formats for the* plane. Used by the non-atomic driver compatibility wrapper only.*/bool format_default;/** @modifiers: array of modifiers supported by this plane */uint64_t *modifiers;/** @modifier_count: Size of the array pointed at by @modifier_count. */unsigned int modifier_count;/*** @crtc:** Currently bound CRTC, only meaningful for non-atomic drivers. For* atomic drivers this is forced to be NULL, atomic drivers should* instead check &drm_plane_state.crtc.*/struct drm_crtc *crtc;/*** @fb:** Currently bound framebuffer, only meaningful for non-atomic drivers.* For atomic drivers this is forced to be NULL, atomic drivers should* instead check &drm_plane_state.fb.*/struct drm_framebuffer *fb;/*** @old_fb:** Temporary tracking of the old fb while a modeset is ongoing. Only* used by non-atomic drivers, forced to be NULL for atomic drivers.*/struct drm_framebuffer *old_fb;/** @funcs: plane control functions */const struct drm_plane_funcs *funcs;/** @properties: property tracking for this plane */struct drm_object_properties properties;/** @type: Type of plane, see &enum drm_plane_type for details. */enum drm_plane_type type;/*** @index: Position inside the mode_config.list, can be used as an array* index. It is invariant over the lifetime of the plane.*/unsigned index;/** @helper_private: mid-layer private data */const struct drm_plane_helper_funcs *helper_private;/*** @state:** Current atomic state for this plane.** This is protected by @mutex. Note that nonblocking atomic commits* access the current plane state without taking locks. Either by going* through the &struct drm_atomic_state pointers, see* for_each_oldnew_plane_in_state(), for_each_old_plane_in_state() and* for_each_new_plane_in_state(). Or through careful ordering of atomic* commit operations as implemented in the atomic helpers, see* &struct drm_crtc_commit.*/struct drm_plane_state *state;/*** @alpha_property:* Optional alpha property for this plane. See* drm_plane_create_alpha_property().*/struct drm_property *alpha_property;/*** @zpos_property:* Optional zpos property for this plane. See* drm_plane_create_zpos_property().*/struct drm_property *zpos_property;/*** @rotation_property:* Optional rotation property for this plane. See* drm_plane_create_rotation_property().*/struct drm_property *rotation_property;/*** @blend_mode_property:* Optional "pixel blend mode" enum property for this plane.* Blend mode property represents the alpha blending equation selection,* describing how the pixels from the current plane are composited with* the background.*/struct drm_property *blend_mode_property;/*** @color_encoding_property:** Optional "COLOR_ENCODING" enum property for specifying* color encoding for non RGB formats.* See drm_plane_create_color_properties().*/struct drm_property *color_encoding_property;/*** @color_range_property:** Optional "COLOR_RANGE" enum property for specifying* color range for non RGB formats.* See drm_plane_create_color_properties().*/struct drm_property *color_range_property;/*** @scaling_filter_property: property to apply a particular filter while* scaling.*/struct drm_property *scaling_filter_property;
};3. drm_plane结构释义
(0)总述
DRM全解析 —— plane详解(1)
struct drm_plane —— 核心的DRM plane控制结构。
planes表示显示块的扫描输出硬件。它们从drm_framebuffer中接收输入数据,并将其提供给drm_crtc。planes控制颜色转换(有关详细信息,请参见“平面合成属性”),并且还参与输入像素的颜色转换(请参见“颜色管理属性”以了解详细信息)。
作用如下图示:

(1)struct drm_device *dev
/** @dev: DRM device this plane belongs to */struct drm_device *dev;此plane所属的DRM设备。
(2)struct list_head head
/*** @head:** List of all planes on @dev, linked from &drm_mode_config.plane_list.* Invariant over the lifetime of @dev and therefore does not need* locking.*/struct list_head head;@dev上所有平面的列表,链接自&drm_mode_config.plane_List。在@dev的生命周期内保持不变,因此不需要锁定。
(3)char *name
/** @name: human readable name, can be overwritten by the driver */char *name;人类可读的名称(名字),可以被驱动程序覆盖。
下一篇文章继续深入释义drm_plane结构中其余成员。
相关文章:
DRM全解析 —— plane详解(1)
本文参考以下博文: Linux内核4.14版本——drm框架分析(5)——plane分析 特此致谢! 1. 简介 一个plane代表一个image layer(硬件图层),最终的image由一个或者多个plane(s)组成。plane和 Framebuffer 一样是内存地址。…...

数据结构总结
数据结构 相关博文 单链表数组模拟单链表-CSDN博客双链表数组模拟双链表-CSDN博客栈及单调栈数组模拟栈以及单调栈-CSDN博客队列及单调队列数组模拟队列以及单调队列-CSDN博客KMPKMP详细算法思路-CSDN博客TrieTire树的理解-CSDN博客并查集并查集(面试常考ÿ…...

在SOLIDWORKS搭建一个简易的履带式机器人
文章目录 前言一、构建模型基本单元二、搭建车体模块三.插入轮子4.构建履带 前言 趁着十一假期,在solidworks中搭建了一个履带式机器人小车,计划将其应用在gazebo中完成多机器人编队的仿真。 一、构建模型基本单元 构建底板(a面)…...

C# 为什么要限制静态方法的使用
前言 在工作了一年多之后,我发现静态方法的耦合问题实在是头疼。如果可以尽量不要使用静态方法存储数据,如果要存储全局数据就把数据放在最顶层的主函数里面。 静态方法问题 耦合问题,不要用静态方法存储数据 我这里有两个静态方法&#…...
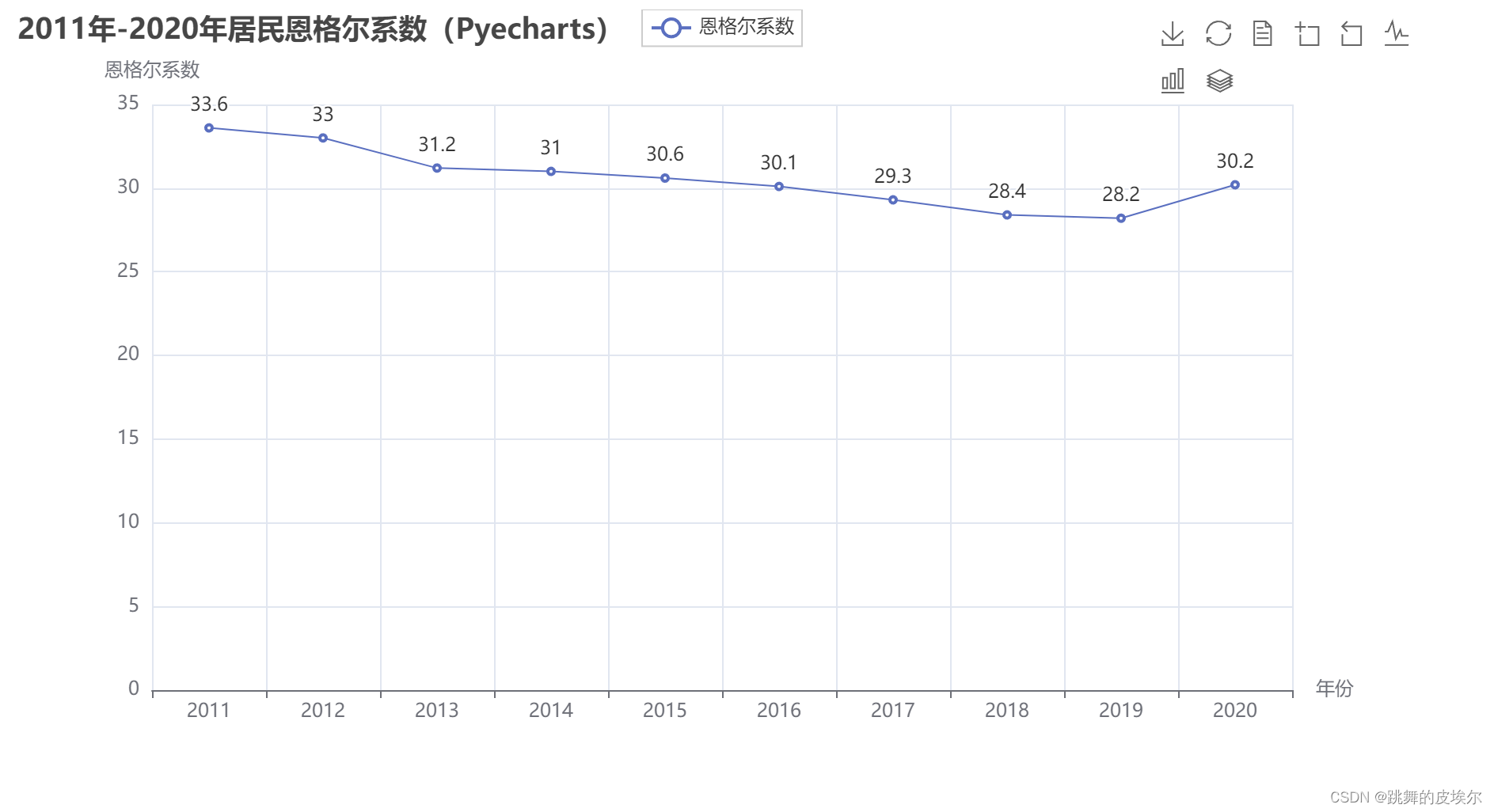
【已解决】Pyecharts折线图,只有坐标轴没有折线数据
【已解决】Pyecharts折线图,只有坐标轴没有折线数据 1、问题复现2、原因3、问题解决 1、问题复现 在做简单的数据通过 Pyecharts 生成折现图的时候,一直只有坐标轴没有折线数据,但是代码一直看不出问题,代码如下: im…...
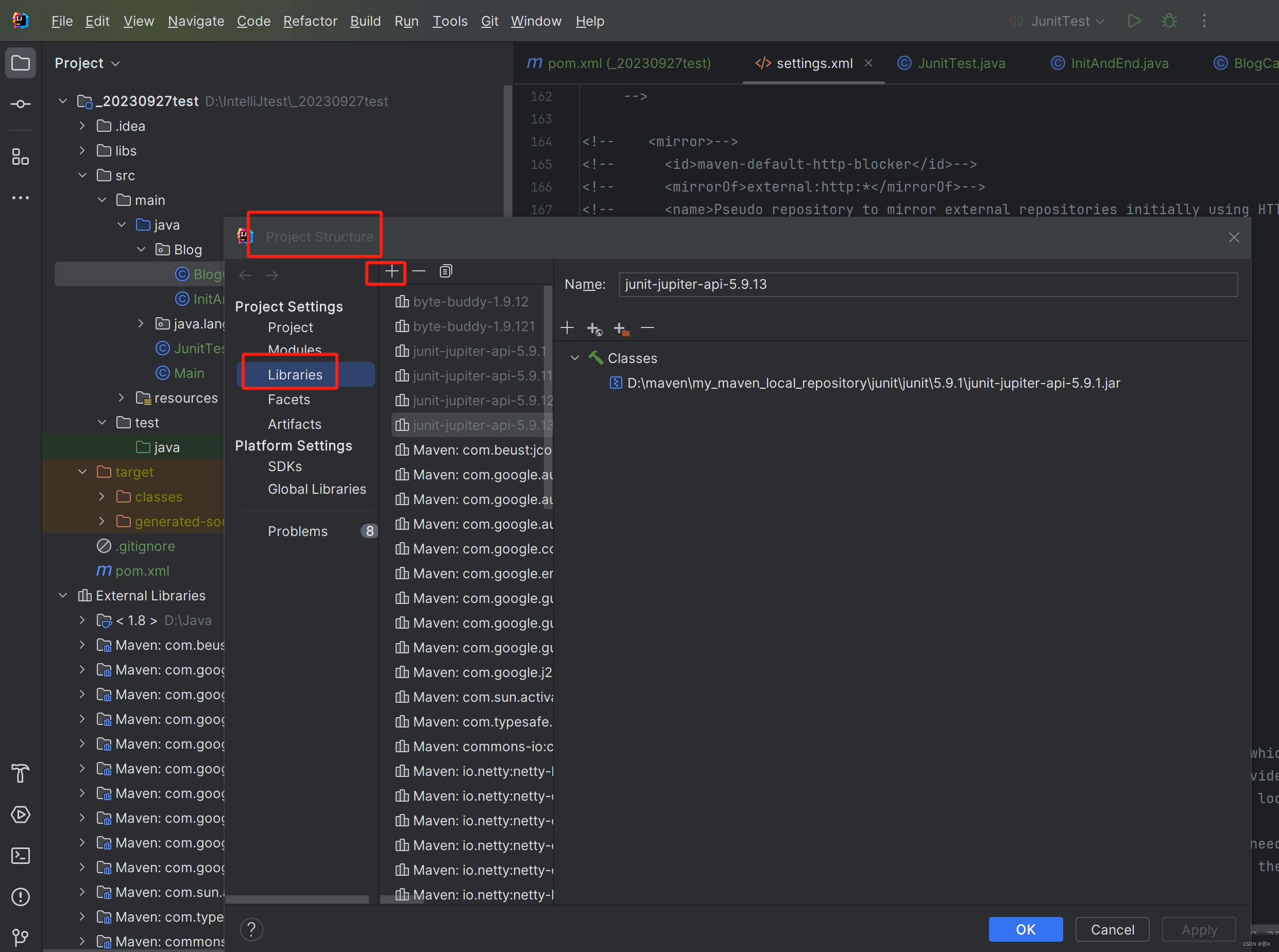
win10搭建Selenium环境+java+IDEA(3)
这里主要对前面的maven和selenium做补充说明,以及更新一些pom文件下载依赖的问题。 IDEA里面,如果你创建的工程是maven工程文件,那么就会有一个pom.xml文件,可以在这个网站:https://mvnrepository.com/搜索依赖&#…...

String 、Stringbuffer、StringBuilder区别
上代码 public class Test {public static void main(String[] args) {//String 连接10000次消耗1127ms//StringBuffer 连接10000次消耗5ms//StringBuilder 连接10000次消耗3msStringTest(10000);StringBufferTest(10000);StringBuilderTest(10000);}public static void Strin…...

如何提升爬虫IP使用效率?精打细算的方法分享
在进行爬虫数据采集时,爬虫IP是不可或缺的工具。然而,爬虫IP的费用可能是一个爬虫项目的重要开支之一。为了帮助您节省爬虫IP经费,本文将分享一些经济高效的方法,让您在使用爬虫IP时更加节约成本,提高经济效益。 一、优…...
 Redis 7 第19讲 缓存过期淘汰策略 大厂篇)
(高阶) Redis 7 第19讲 缓存过期淘汰策略 大厂篇
🌹 以下分享 Redis 缓存淘汰策略,如有问题请指教。🌹🌹 如你对技术也感兴趣,欢迎交流。🌹🌹🌹 如有对阁下帮助,请👍点赞💖收藏🐱🏍分享😀 面试题 1. 生产上,redis内存设置的多少 2. 如何配置、修改Redis 内存大小 3. 如果内存满了,如何处理 4. …...

【四旋翼飞行器】模拟四旋翼飞行器的平移和旋转动力学(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
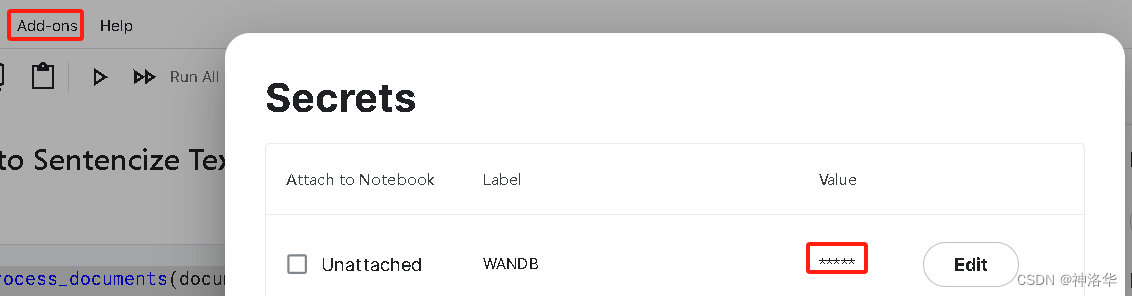
Kaggle - LLM Science Exam(一):赛事概述、数据收集、BERT Baseline
文章目录 一、赛事概述1.1 OpenBookQA Dataset1.2 比赛背景1.3 评估方法和代码要求1.4 比赛数据集1.5 优秀notebook 二、BERT Baseline2.1 数据预处理2.2 定义data_collator2.3 加载模型,配置trainer并训练2.4 预测结果并提交2.5 deberta-v3-large 1k Wikiÿ…...

mmap底层驱动实现(remap_pfn_range函数)
mmap底层驱动实现 myfb.c(申请了128K空间) #include <linux/init.h> #include <linux/tty.h> #include <linux/device.h> #include <linux/export.h> #include <linux/types.h> #include <linux/module.h> #inclu…...

品牌如何查窜货
当渠道中的产品出现不按规定区域销售时,这种行为就叫做窜货,窜货不仅会扰乱渠道的健康发展,损害经销商的利益,同时会滋生低价、假货的发生,有效的管控窜货,需要品牌先将窜货链店铺找出来,才能进…...

Java基于SpringBoot的车辆充电桩
博主介绍:✌程序员徐师兄、7年大厂程序员经历。全网粉丝30W,Csdn博客专家、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 文章目录 1、效果演示效果图 技术栈2、 前言介绍(完整源码请私聊)3、主要技术3.4.1…...
【ARM】(1)架构简介
前言 ARM既可以认为是一个公司的名字,也可以认为是对一类微处理器的通称,还可以认为是一种技术的名字。 ARM公司是专门从事基于RISC技术芯片设计开发的公司,作为知识产权(IP)供应商,本身不直接从事芯片生产…...

企业完善质量、环境、健康安全三体系认证的作用及其意义!
一、ISO三体系标准作用 ISO9001:质量管理体系,专门针对企业的质量管理,投标首选,很多大客户要求企业必备这项。 ISO14001:环境管理体系,针对企业的生产环境,排污,节能环保…...

<HarmonyOS第一课>运行Hello World——闯关习题及答案
判断题 1.DevEco Studio是开发HarmonyOS应用的一站式集成开发环境。( 对 ) 2.main_pages.json存放页面page路径配置信息。( 对 ) 单选题 1.在stage模型中,下列配置文件属于AppScope文件夹的是?ÿ…...

NLP 02 RNN
一、RNN RNN(Recurrent Neural Network),中文称作循环神经网络它一般以序列数据为输入通过网络内部的结构设计有效捕捉序列之间的关系特征,一般也是以序列形式进行输出。 传统神经网络(包括CNN),输入和输出都是互相独立的。但有些任务,后续的输出和之前…...

@PostConstruct注解
PostConstruct注解 PostConstruct注解是javax.annotation包下的一个注解,用于标记一个方法,在构造函数执行之后,依赖注入(如Autowired,意味着在方法内部可以安全地使用依赖注入的成员变量,而不会出现空指针异常&#…...

拓世AI|中秋节营销攻略,创意文案和海报一键生成
秋风意境多诗情,中秋月圆思最浓。又是一年中秋节,作为中国传统的重要节日之一,中秋节的意义早已不再仅仅是一家团圆的节日,更是一场商业盛宴。品牌方们纷纷加入其中,希望能够借助这一节日为自己的产品赢得更多的关注和…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

CentOS 7下‘Development Tools’和‘开发工具’组有区别吗?实测告诉你答案
CentOS 7下‘Development Tools’与‘开发工具’的隐藏关联:技术细节全解析在Linux系统管理中,yum的软件包组功能一直是个既实用又充满谜团的领域。特别是当系统语言环境与软件包元数据语言不一致时,开发者们常常会遇到一个有趣的现象&#x…...

GEMM内核与MHA中的寄存器分配优化策略
1. GEMM内核与寄存器分配基础解析通用矩阵乘法(GEMM)作为深度学习计算的核心算子,其性能表现直接决定了神经网络训练和推理的效率。在硬件层面,寄存器分配的优劣往往能带来数倍的性能差异。我们以典型的GEMM运算C αAB βC为例&…...

Owl-Alpha 新手快速上手指南
在处理大规模数据或构建高性能应用时,我们常常会遇到一个棘手的问题:如何在不阻塞主线程的情况下,高效地执行耗时任务?无论是处理图像、解析大型文件,还是进行复杂的数学运算,传统的单线程模式往往会让界面…...

【紧急预警】Lindy衰减临界点已提前至第8.3个月!2024最新《营销自动化寿命健康度白皮书》限时开放前500份
更多请点击: https://kaifayun.com 第一章:Lindy衰减临界点的理论重构与实证突破 Lindy效应传统上描述“越老越长寿”的非线性生存规律,但其在现代软件系统、开源生态与协议层技术栈中的适用边界正遭遇结构性挑战。本文首次将Lindy模型从静…...
_kaic)
ssm207基于SSM的视频播放系统的设计与实现+vue(文档+源码)_kaic
第五章 系统的实现5.1 用户功能模块的实现5.1.1系统主界面用户进入本系统可查看系统信息,系统主界面展示如图5.1所示。图5.1网站主界面5.1.2视频详情界面用户可选择视频查看视频详情信息,并可进行视频播放操作,视频详情界面展示如图5.2所示。…...

企业内统一API网关与Taotoken聚合平台对接方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 企业内统一API网关与Taotoken聚合平台对接方案 在推进AI应用落地的过程中,许多中大型企业面临一个共同挑战:…...

用图神经网络做缺陷定位,准确率比传统方法高出30%
在现代软件工程的复杂迷宫中,缺陷定位始终是测试团队面临的核心挑战。想象这样一个场景:一个电商系统在特定压力条件下偶发订单丢失,日志中只留下泛泛的超时错误,问题可能深藏在上百个微服务的调用链、分布式事务的竞态条件或某个…...

对比不同模型在创意生成任务中的效果与token消耗差异
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比不同模型在创意生成任务中的效果与token消耗差异 在为一场创意大赛准备素材时,我们面临一个常见的选择:…...

中小企无需重型数据中台:轻量化数据体系搭建完整方案
过去几年,“数据中台”一度成为企业数字化的标配热词。大量中小企业盲目跟风搭建重型数据中台,投入高额成本、耗费数月甚至数年周期,最终落地效果极差:功能冗余、运维复杂、使用率低、投入产出比失衡。大量项目最终沦为“摆设式中…...