详解ROS时间戳
ROS(Robot Operating System)是一个用于机器人开发的开源软件框架,其中涉及到了一些与时间相关的概念和工具,如时间戳、计时器等。本文将主要介绍ROS中时间戳的概念和应用,并提供一个Python代码案例演示如何处理ROS时间戳。
ROS时间戳的概念
在ROS中,时间戳(timestamp)是用来表示某个事件发生时间的一种方式。时间戳通常由两部分组成:一个整数表示自某个特定时间点(如1970年1月1日00:00:00 UTC)到事件发生时的秒数(即“秒级时间戳”),以及一个整数表示事件发生时相对于秒级时间戳的纳秒数(即“纳秒偏移量”)。
在ROS中,时间戳通常用一种特定的数据结构rospy.Time来表示。这个数据结构包含两个成员变量secs和nsecs,分别对应秒级时间戳和纳秒偏移量。例如,下面的代码创建了一个时间戳表示2022年3月1日12:34:56.789000000这个时刻:
import rospy t = rospy.Time.from_sec(1646145296.789)其中from_sec方法将秒级时间戳作为参数,返回一个rospy.Time对象。
除了rospy.Time,在ROS中还有另外一个时间戳类型std_msgs/Header,该类型包含一个stamp成员变量,是一个rospy.Time对象,表示消息的时间戳信息。例如,下面是一个带有时间戳的消息:
header:
seq: 1
stamp:
{ secs: 1646145296,
nsecs: 789000000 }
frame_id: "world"
ROS时间戳的应用
在ROS中,时间戳被广泛应用于消息传输、数据记录、控制等方面。其中,一些重要的应用包括:
消息传输
ROS中的消息通常包含一个时间戳stamp,用来表示消息的发送时间。这个时间戳在一些应用中非常重要,例如在多机器人协同、多传感器融合等场景下,需要保证各个消息之间的时间同步,才能正确地进行数据融合和处理。
数据记录
在ROS中,数据记录是一项重要的功能。数据记录器(rosbag)可以记录ROS系统中所有的消息和服务调用,并将它们保存到磁盘上,以供后续的数据处理和分析。在数据记录过程中,时间戳是一个非常重要的信息,可以用来对消息进行排序、匹配、过滤等操作。
时间同步
我们在ROS中使用的时间戳有两种,一种是ROS的系统时间戳(ROS time), 另一种是外部硬件设备的时间戳(例如相机、激光雷达等),也称为硬件时间戳(hardware time)。
ROS时间戳是一个浮点数,以秒为单位,从1970年1月1日00:00:00 UTC开始计算,可以通过rospy.Time.now()获取。ROS时间戳在整个ROS系统中是全局唯一的,也就是说,当ROS系统中的节点(node)需要在时间上进行同步时,ROS时间戳可以作为一个标准,各个节点可以基于它来同步。
硬件时间戳则是由外部设备提供的,它可以是相对时间戳(相对于设备启动时间或者某个固定时间点的时间差),也可以是绝对时间戳(相对于某个固定的时间点的时间)。由于外部设备和ROS系统是
不同的系统,它们的时钟可能会有差异,因此需要进行时间戳转换,将硬件时间戳转换成ROS时间戳,或将ROS时间戳转换成硬件时间戳,以便进行时间同步和数据融合等操作。
在ROS中,时间戳的表示方式有两种:secs和nsecs。其中,secs表示自1970年1月1日00:00:00 UTC开始经过的秒数,是一个32位整数;nsecs表示自1970年1月1日00:00:00 UTC开始经过的纳秒数,是一个32位整数。ROS时间戳可以通过secs和nsecs组合而成。
下面是一个Python代码示例,演示如何将ROS时间戳转换为Python中的datetime对象:
import rospy
from datetime import datetime# 获取ROS时间戳
ros_time = rospy.Time.now()# 将ROS时间戳转换为datetime对象
secs = ros_time.secs
nsecs = ros_time.nsecs
time_in_nanoseconds = secs * 1e9 + nsecs
datetime_obj = datetime.utcfromtimestamp(time_in_nanoseconds / 1e9)# 打印datetime对象
print(datetime_obj)
ROS消息中的meta字段里的时间戳:
header: seq: 86694stamp: secs: 1673860445nsecs: 720726000frame_id: "car"
meta: algorithm_name: "vision_perception"instance_name: "vision_perception_around_view"sensor_timestamp_us: 1673860445491191pipeline_start_timestamp_us: 1673860445624726pipeline_finish_timestamp_us: 1673860445719726relevant_frames: - timestamp_us: 1673860445491191sequence: 13501camera_source: value: 0camera_model: value: 2- timestamp_us: 1673860445491191sequence: 13501camera_source: value: 1camera_model: value: 2-
在这个ROS消息中,meta字段包含了一些额外的元数据信息,其中包括三个时间戳:
sensor_timestamp_us:传感器时间戳,单位为微秒。它表示数据采集的实际时间。pipeline_start_timestamp_us:数据处理管道开始处理的时间戳,单位为微秒。pipeline_finish_timestamp_us:数据处理管道处理完成的时间戳,单位为微秒。
这三个时间戳可以用来评估数据处理管道的性能,例如计算延迟等指标。同时,还可以使用这些时间戳来进行数据同步,例如将传感器数据同步到机器人的其他传感器或执行器。
需要注意的是,这三个时间戳的精度可能会因为硬件、操作系统或其他因素而不同,因此需要进行时间戳转换和校准,以确保数据的准确性和可靠性。
除了这三个时间戳之外,ROS消息中的relevant_frames字段中还包含了一些与时间相关的信息,例如timestamp_us字段表示相关帧的时间戳,sequence表示相关帧的序列号等等。这些信息可以帮助我们对数据进行更加精细的处理和分析。
stamp 和 meta
stamp:
secs: 1673860445
nsecs: 720726000
这个时间戳表示 ROS 消息的创建时间。与此相比,meta 部分中的 timestamp_us 字段用于记录与这个消息相关的其他时间戳,例如传感器采集时间戳、处理流程开始/结束时间戳、相关帧的时间戳等。
因此,如果要在 meta 部分中找到与 stamp 字段对应的时间戳,应该寻找最接近 stamp 时间戳的 timestamp_us 值。在这个例子中,sensor_timestamp_us 字段的值是 1673860445491191,与 stamp 时间戳的值 1673860445.720726000 相差不到 1 毫秒,因此它可能是与 stamp 对应的时间戳。但是需要注意的是,实际上这个时间戳可能对应于消息的创建时间,也可能对应于消息中包含的某个帧的时间戳,具体要看这个消息的含义和上下文。
相关文章:

详解ROS时间戳
ROS(Robot Operating System)是一个用于机器人开发的开源软件框架,其中涉及到了一些与时间相关的概念和工具,如时间戳、计时器等。本文将主要介绍ROS中时间戳的概念和应用,并提供一个Python代码案例演示如何处理ROS时间…...

Android Window、WindowManager
1.窗口Window 在Android中显示一个界面,首先想到的是Activity、Dialog或Toast。但是在有些情况下,比如悬浮球,用Activity会显然多余,这个时候可以直接使用窗口来实现。 Android中所有的视图都是通过Window来呈现的,不管是Activity、Dialog还是Toast,它们的视图实际上都…...

【一天一门编程语言】怎样设计一门编程语言?
怎样设计一门编程语言? 确定目标 确定语言的用途: 是一门通用编程语言,还是一门专门面向某个特定目标的语言?是一门面向对象的语言,还是一门过程化的语言?将语言的最终用户定义为谁? 确定语言…...

微服务保护 -- 初识 Sentinel(雪崩问题,快速入门Sentinel)
大家好,今天我们要来学习阿里巴巴开源的流量控制和熔断降级框架 – Sentinel 。 1、雪崩问题及解决方案 首选我们来了解一下雪崩问题及其解决方案,我们学习这个微服务保护,其实就是为了去应对类似于雪崩问题这样的服务故障。 1.1 什么是雪…...

软件测试面试问答
笔试 笔试的话我们需要揣测具体会考什么内容,我们可以通过招聘信息去了解该公司需要什么样的技能,以此来准备笔试。一般必考的内容会有编程,测试用例设计,工作流程,逻辑思维等内容,除此之外每个公司可能还会…...

【架构】架构师的核心能力-抽象能力
文章目录一、通过归纳法找共性二、通过演绎法找关系三、通过归纳法找特性四、最后架构的核心是管理复杂度,架构师的核心能力是抽象能力,什么是抽象能力?抽象能力就是一种化繁为简的能力。何为化繁为简?就是把一种复杂的事情变得简…...
)
前端一面常见react面试题(持续更新中)
React 组件中怎么做事件代理?它的原理是什么? React基于Virtual DOM实现了一个SyntheticEvent层(合成事件层),定义的事件处理器会接收到一个合成事件对象的实例,它符合W3C标准,且与原生的浏览器…...

亥姆霍兹线圈测量系统
亥姆霍兹线圈[Helmholtz线圈]是指由具有相同线圈匝数、相同线圈绕制方式且线圈半径等于线圈间距的一对或者多对线圈构成的线圈组合。 根据线圈的形状,亥姆霍兹线圈可分为圆形亥姆霍兹线圈和方形亥姆霍兹线圈;根据磁场方向,亥姆霍兹线圈可分为…...

JavaScript 类型转换
Number() 转换为数字, String() 转换为字符串, Boolean() 转化为布尔值。JavaScript 数据类型在 JavaScript 中有 5 种不同的数据类型:stringnumberbooleanobjectfunction3 种对象类型:ObjectDateArray2 个不包含任何值的数据类型…...

Spring Batch 综合案例实战-项目准备
目录 案例需求 分析 项目准备 步骤1:新开spring-batch-example 步骤2:导入依赖 步骤3:配置文件 步骤4:建立employee表与employe_temp表 步骤5:建立基本代码体系-domain-mapper-service-controller-mapper.xml …...
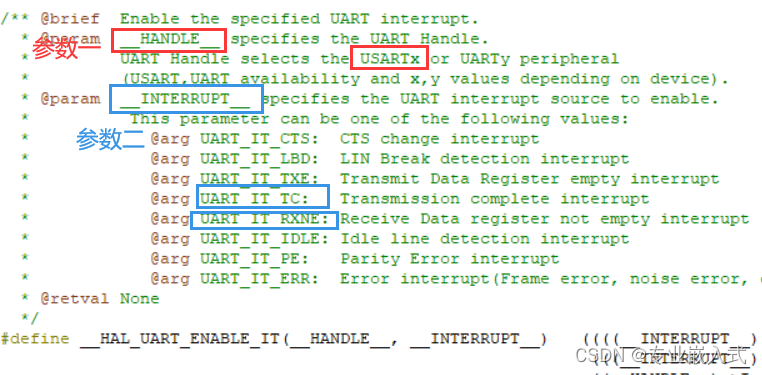
STM32CubeMX串口USART中断发送接收数据
本文代码使用 HAL 库。 文章目录前言一、中断控制二、USART中断使用1. 中断优先级设置 :2. 使能中断3. 使能UART的发送、接收中断4. 中断收发函数5. 中断处理函数6. 中断收发回调函数三、串口中断实验串口中断发送数据点亮 led:实验现象:总结…...

JavaScript Web Workers使用流程
背景 Web Workers是一个API,允许在浏览器中运行后台处理任务,而不影响用户界面(UI)线程的稳定性。 Web Workers 可用于消除阻止 UI 的耗时任务,如图表生成,物理模拟或数据分析等: 使用 Web W…...
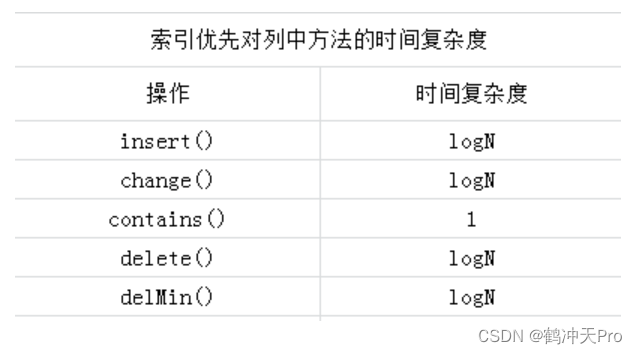
数据结构与算法(五):优先队列
这节总结一下优先队列的常用实现方法。 一、基本概念 普通的队列是一种先进先出的数据结构,元素在队列尾追加,而从队列头删除。在优先队列中,元素被赋予优先级。当访问元素时,具有最高优先级的元素最先删除。优先队列具有最高级…...
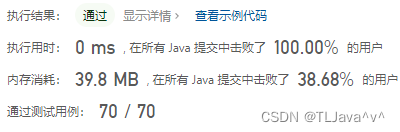
二叉树的前序遍历-java两种方式-力扣144
一、题目描述给你二叉树的根节点 root ,返回它节点值的 前序 遍历。示例 1:输入:root [1,null,2,3]输出:[1,2,3]示例 2:输入:root []输出:[]示例 3:输入:root [1]输出…...
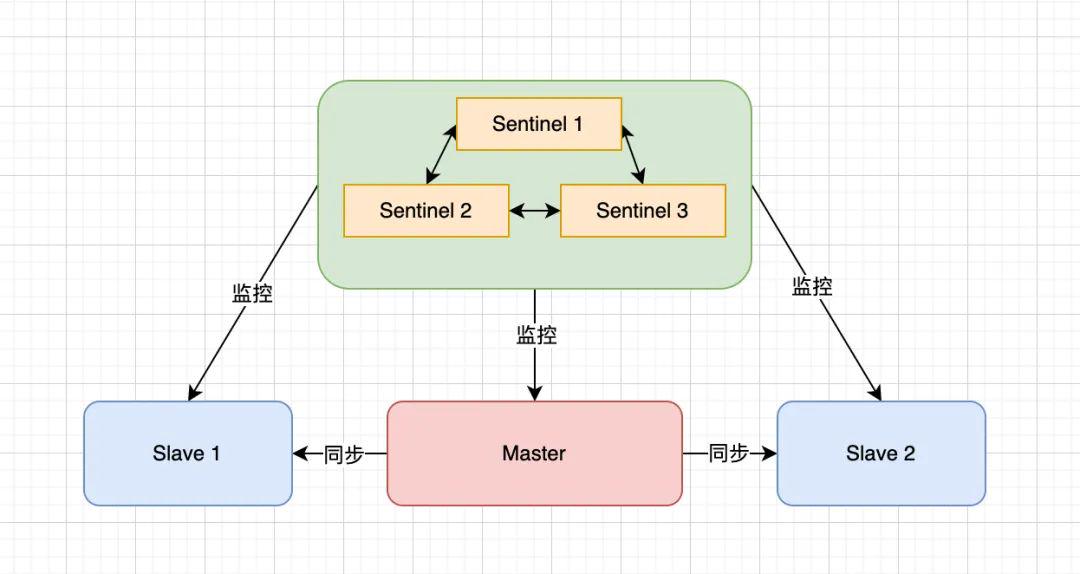
浅析 Redis 主从同步与故障转移原理
我们在生产中使用 Redis,如果只部署一个 Redis 实例,当该实例宕机,到恢复之前都不可用;虽说 Redis 一般都用来做缓存,但不可用给业务系统带来的影响也是不小的,流量大时甚至会导致整个服务宕机。所以 Redis…...
MyBatis学习笔记(七) —— 特殊SQL的执行
7、特殊SQL的执行 7.1、模糊查询 模糊查询的三种方式: 方式1:select * from t_user where username like ‘%${mohu}%’ 方式2:select * from t_user where username like concat(‘%’,#{mohu},‘%’) 方式3:select * from t_u…...
计算机组成原理(1)--计算机系统概论
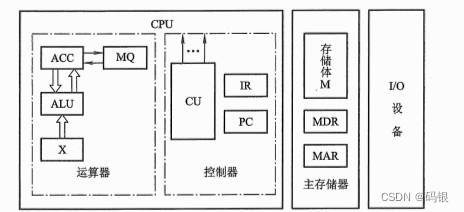
一、计算机系统简介1.计算机系统软硬件概念计算机系统由“硬件”和“软件”两大部分组成。所谓“硬件”,是指计算机的实体部分,它由看得见摸得着的各种电子元器件,各类光、电、机设备的实物组成,如主机、外部设备等。所谓“软件”…...
jdbc模板的基本使用
1.JdbcTemplate的开发步骤 <1>导入spring-jdbc和spring-tx坐标 <2>创建数据库表和实体 <3>创建JdbcTemplate对象 <4>执行数据库 2.JdbcTemplate快速入门 <1>导入坐标 <dependency><groupId>org.springframework</groupId><…...

JPA 注解及主键生成策略使用指南
JPA 注解 Entity 常用注解 参考:JPA & Spring Data JPA学习与使用小记 指定对象与数据库字段映射时注解的位置:如Id、Column等注解指定Entity的字段与数据库字段对应关系时,注解的位置可以在Field(属性)或Prope…...
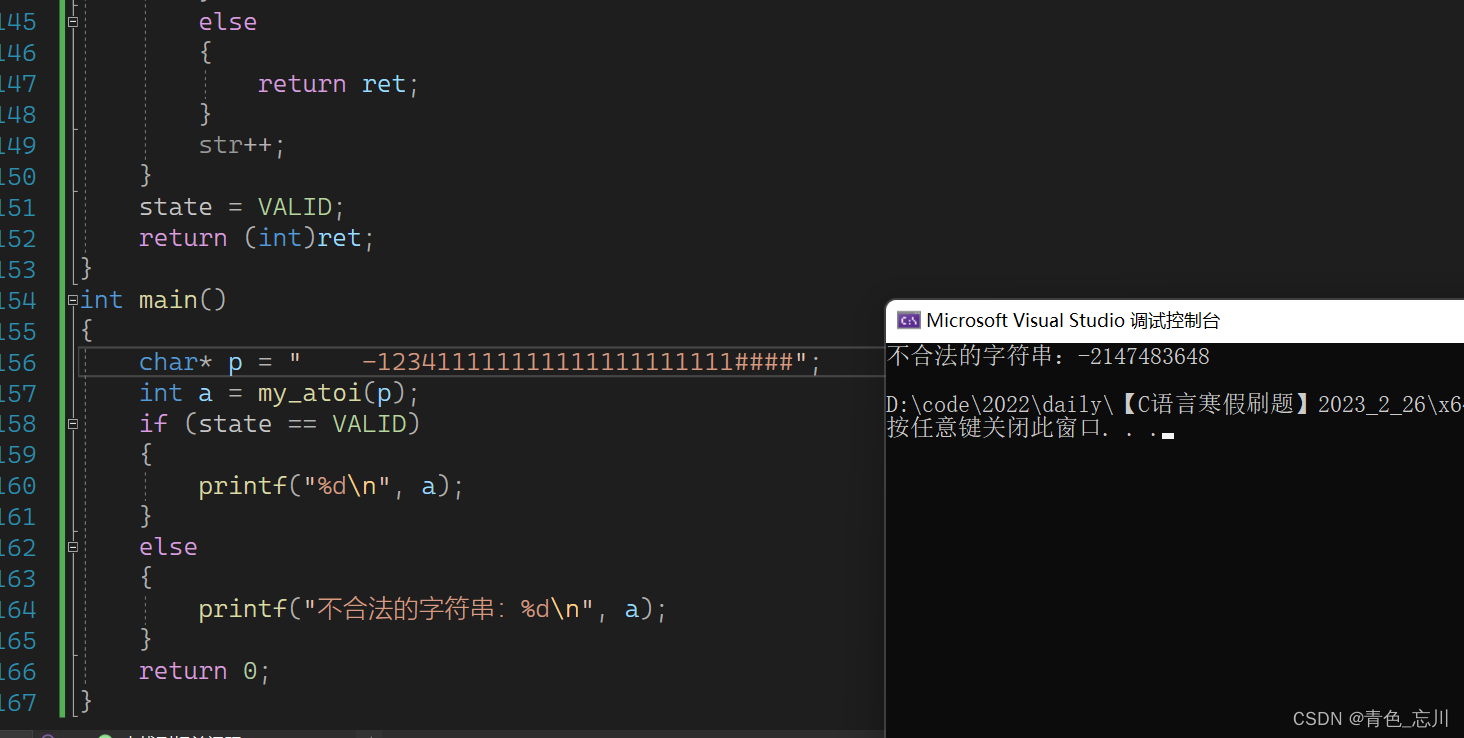
【C语言刷题】找单身狗、模拟实现atoi
目录 一、找单身狗 1.暴力循环法 2.分组异或法 二、模拟实现atoi 1.atoi函数的功能 2.模拟实现atoi 一、找单身狗 题目描述:给定一个数组中只有两个数字是出现一次,其他所有数字都出现了两次。 编写一个函数找出这两个只出现一次的数字。 比如&…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...

Chapter03-Authentication vulnerabilities
文章目录 1. 身份验证简介1.1 What is authentication1.2 difference between authentication and authorization1.3 身份验证机制失效的原因1.4 身份验证机制失效的影响 2. 基于登录功能的漏洞2.1 密码爆破2.2 用户名枚举2.3 有缺陷的暴力破解防护2.3.1 如果用户登录尝试失败次…...

测试markdown--肇兴
day1: 1、去程:7:04 --11:32高铁 高铁右转上售票大厅2楼,穿过候车厅下一楼,上大巴车 ¥10/人 **2、到达:**12点多到达寨子,买门票,美团/抖音:¥78人 3、中饭&a…...

WordPress插件:AI多语言写作与智能配图、免费AI模型、SEO文章生成
厌倦手动写WordPress文章?AI自动生成,效率提升10倍! 支持多语言、自动配图、定时发布,让内容创作更轻松! AI内容生成 → 不想每天写文章?AI一键生成高质量内容!多语言支持 → 跨境电商必备&am…...

土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测;从基础到高级,涵盖ArcGIS数据处理、ENVI遥感解译与CLUE模型情景模拟等
🔍 土地利用/土地覆盖数据是生态、环境和气象等诸多领域模型的关键输入参数。通过遥感影像解译技术,可以精准获取历史或当前任何一个区域的土地利用/土地覆盖情况。这些数据不仅能够用于评估区域生态环境的变化趋势,还能有效评价重大生态工程…...

C++八股 —— 单例模式
文章目录 1. 基本概念2. 设计要点3. 实现方式4. 详解懒汉模式 1. 基本概念 线程安全(Thread Safety) 线程安全是指在多线程环境下,某个函数、类或代码片段能够被多个线程同时调用时,仍能保证数据的一致性和逻辑的正确性…...

管理学院权限管理系统开发总结
文章目录 🎓 管理学院权限管理系统开发总结 - 现代化Web应用实践之路📝 项目概述🏗️ 技术架构设计后端技术栈前端技术栈 💡 核心功能特性1. 用户管理模块2. 权限管理系统3. 统计报表功能4. 用户体验优化 🗄️ 数据库设…...
day36-多路IO复用
一、基本概念 (服务器多客户端模型) 定义:单线程或单进程同时监测若干个文件描述符是否可以执行IO操作的能力 作用:应用程序通常需要处理来自多条事件流中的事件,比如我现在用的电脑,需要同时处理键盘鼠标…...
springboot 日志类切面,接口成功记录日志,失败不记录
springboot 日志类切面,接口成功记录日志,失败不记录 自定义一个注解方法 import java.lang.annotation.ElementType; import java.lang.annotation.Retention; import java.lang.annotation.RetentionPolicy; import java.lang.annotation.Target;/***…...
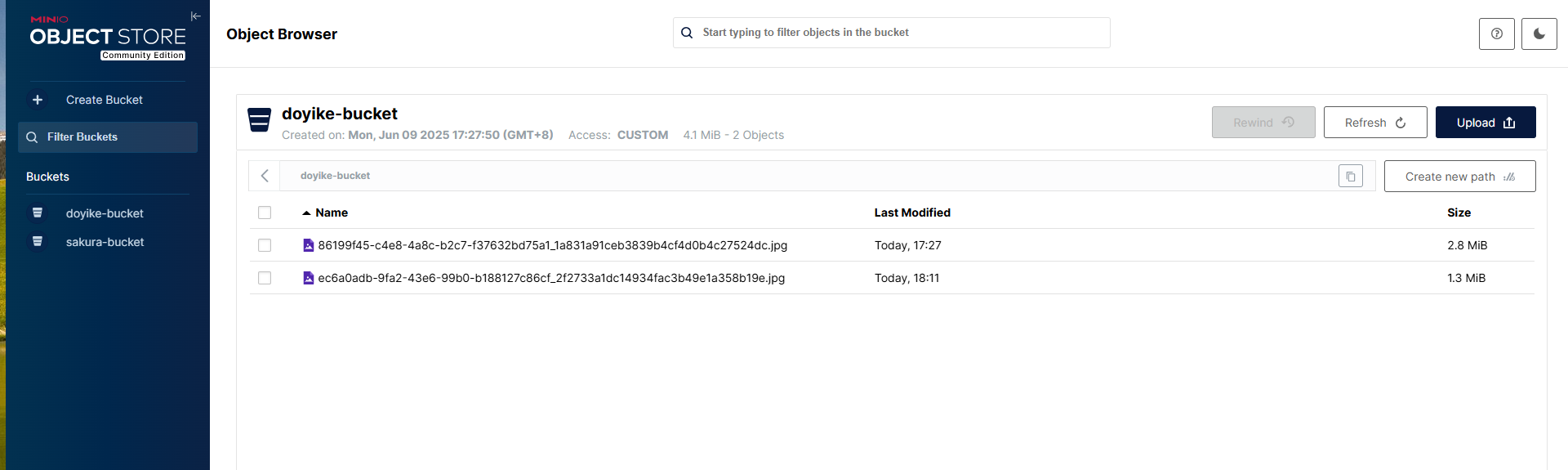
Linux部署私有文件管理系统MinIO
最近需要用到一个文件管理服务,但是又不想花钱,所以就想着自己搭建一个,刚好我们用的一个开源框架已经集成了MinIO,所以就选了这个 我这边对文件服务性能要求不是太高,单机版就可以 安装非常简单,几个命令就…...