STM32 LL库 TIM3定时器多通道捕获输入采集
为什么不用HAL库,使用HAL库捕获输入一个通道还尚可,多通道捕获由于HAL的回调函数不符合我的要求,干脆直接切换到LL库。网上找了许多,代码处理写的不符合我的要求,这里记录一下我的调试过程。
TIM2输出1路PWM信号,使用1分3杜邦线接到TIM3的CH2-CH3-CH4通道进行捕获输入。
#include "tim.h"/* TIM2 init function */
void MX_TIM2_Init(void)
{LL_TIM_InitTypeDef TIM_InitStruct = {0};LL_TIM_OC_InitTypeDef TIM_OC_InitStruct = {0};LL_GPIO_InitTypeDef GPIO_InitStruct = {0};/* Peripheral clock enable */LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM2);TIM_InitStruct.Prescaler = 63;TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;TIM_InitStruct.Autoreload = 9999;TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;LL_TIM_Init(TIM2, &TIM_InitStruct);LL_TIM_DisableARRPreload(TIM2);LL_TIM_SetClockSource(TIM2, LL_TIM_CLOCKSOURCE_INTERNAL);LL_TIM_OC_EnablePreload(TIM2, LL_TIM_CHANNEL_CH2);TIM_OC_InitStruct.OCMode = LL_TIM_OCMODE_PWM1;TIM_OC_InitStruct.OCState = LL_TIM_OCSTATE_DISABLE;TIM_OC_InitStruct.OCNState = LL_TIM_OCSTATE_DISABLE;TIM_OC_InitStruct.CompareValue = 5000;TIM_OC_InitStruct.OCPolarity = LL_TIM_OCPOLARITY_HIGH;LL_TIM_OC_Init(TIM2, LL_TIM_CHANNEL_CH2, &TIM_OC_InitStruct);LL_TIM_OC_DisableFast(TIM2, LL_TIM_CHANNEL_CH2);LL_TIM_SetTriggerOutput(TIM2, LL_TIM_TRGO_RESET);LL_TIM_DisableMasterSlaveMode(TIM2);/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOB);/**TIM2 GPIO ConfigurationPB3 ------> TIM2_CH2*/GPIO_InitStruct.Pin = LL_GPIO_PIN_3;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_2;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);//-------------------------------------------LL_TIM_OC_SetCompareCH2(TIM2,2000);LL_TIM_CC_EnableChannel(TIM2,LL_TIM_CHANNEL_CH2);LL_TIM_EnableCounter(TIM2);}
/* TIM3 init function */
void MX_TIM3_Init(void)
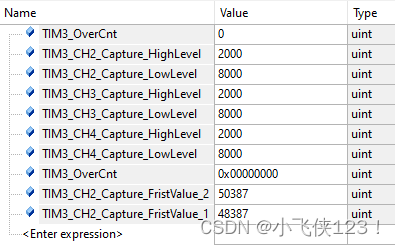
{LL_TIM_InitTypeDef TIM_InitStruct = {0};LL_GPIO_InitTypeDef GPIO_InitStruct = {0};/* Peripheral clock enable */LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM3);LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOA);LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOB);/**TIM3 GPIO ConfigurationPA7 ------> TIM3_CH2PB0 ------> TIM3_CH3PB1 ------> TIM3_CH4*/GPIO_InitStruct.Pin = LL_GPIO_PIN_7;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = LL_GPIO_PIN_0;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = LL_GPIO_PIN_1;GPIO_InitStruct.Mode = LL_GPIO_MODE_ALTERNATE;GPIO_InitStruct.Speed = LL_GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.OutputType = LL_GPIO_OUTPUT_PUSHPULL;GPIO_InitStruct.Pull = LL_GPIO_PULL_NO;GPIO_InitStruct.Alternate = LL_GPIO_AF_1;LL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* TIM3 interrupt Init */NVIC_SetPriority(TIM3_IRQn, 0);NVIC_EnableIRQ(TIM3_IRQn);/* USER CODE BEGIN TIM3_Init 1 *//* USER CODE END TIM3_Init 1 */TIM_InitStruct.Prescaler = 63;TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;TIM_InitStruct.Autoreload = 65535;TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;LL_TIM_Init(TIM3, &TIM_InitStruct);LL_TIM_DisableARRPreload(TIM3);LL_TIM_SetClockSource(TIM3, LL_TIM_CLOCKSOURCE_INTERNAL);LL_TIM_SetTriggerOutput(TIM3, LL_TIM_TRGO_RESET);LL_TIM_DisableMasterSlaveMode(TIM3);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_POLARITY_RISING);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH3, LL_TIM_IC_POLARITY_RISING);LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_ACTIVEINPUT_DIRECTTI);LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_ICPSC_DIV1);LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_IC_FILTER_FDIV1);LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH4, LL_TIM_IC_POLARITY_RISING);/* USER CODE BEGIN TIM3_Init 2 */LL_TIM_EnableIT_UPDATE(TIM3);//更新中断使能LL_TIM_EnableIT_CC2(TIM3);//捕获通道2使能LL_TIM_EnableIT_CC3(TIM3);//捕获通道3使能LL_TIM_EnableIT_CC4(TIM3);//捕获通道4使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH2);//通道2使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH3);//通道3使能LL_TIM_CC_EnableChannel(TIM3,LL_TIM_CHANNEL_CH4);//通道4使能LL_TIM_EnableCounter(TIM3);/* USER CODE END TIM3_Init 2 */}uint32_t TIM3_OverCnt = 0;
int32_t Value_Temp2 = 0;
int32_t Value_Temp3 = 0;
int32_t Value_Temp4 = 0;uint32_t TIM3_CH2_Capture_FristValue_1;
uint32_t TIM3_CH2_Capture_FristValue_2;
uint32_t TIM3_CH2_Capture_FristValue_3;
uint32_t TIM3_CH2_Capture_HighLevel;
uint32_t TIM3_CH2_Capture_LowLevel;
uint8_t TIM3_CH2_CaptureNumber;
//uint32_t TIM3_CH2_Freq = 0;
//float TIM3_CH2_Duty = 0;uint32_t TIM3_CH3_Capture_FristValue_1;
uint32_t TIM3_CH3_Capture_FristValue_2;
uint32_t TIM3_CH3_Capture_FristValue_3;
uint32_t TIM3_CH3_Capture_HighLevel;
uint32_t TIM3_CH3_Capture_LowLevel;
uint8_t TIM3_CH3_CaptureNumber;
//uint32_t TIM3_CH3_Freq = 0;
//float TIM3_CH3_Duty = 0;uint32_t TIM3_CH4_Capture_FristValue_1;
uint32_t TIM3_CH4_Capture_FristValue_2;
uint32_t TIM3_CH4_Capture_FristValue_3;
uint32_t TIM3_CH4_Capture_HighLevel;
uint32_t TIM3_CH4_Capture_LowLevel;
uint8_t TIM3_CH4_CaptureNumber;void TIM3_CallBack(void)
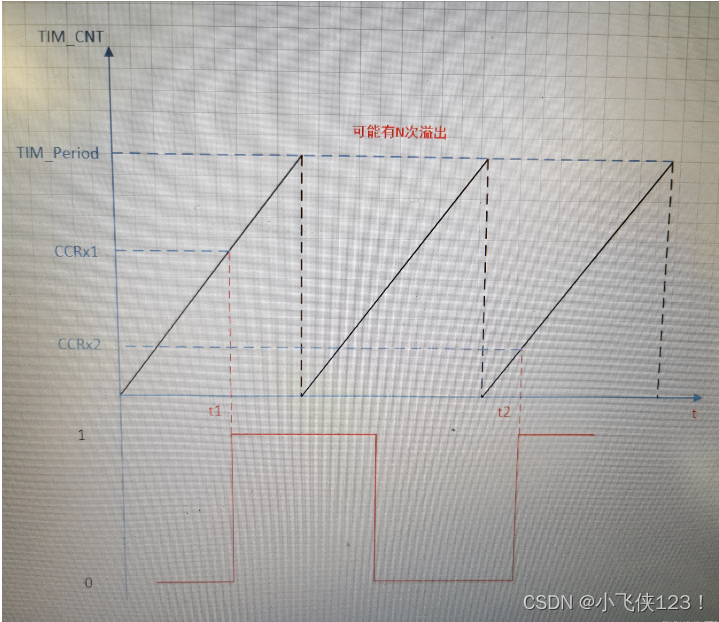
{ //------------------------------------------CC2if(LL_TIM_IsActiveFlag_CC2(TIM3)){ LL_TIM_ClearFlag_CC2(TIM3);if(TIM3_CH2_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH2_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH2_CaptureNumber == 1){ TIM3_CH2_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_FALLING); TIM3_CH2_CaptureNumber = 2;TIM3_OverCnt = 0; }elseif(TIM3_CH2_CaptureNumber == 2){TIM3_CH2_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH2_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH2_Capture_FristValue_2 - TIM3_CH2_Capture_FristValue_1; }else{Value_Temp2 = TIM3_CH2_Capture_FristValue_2 - TIM3_CH2_Capture_FristValue_1;Value_Temp2 = Value_Temp2>0?Value_Temp2:0; TIM3_CH2_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp2;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_RISING); TIM3_CH2_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH2_CaptureNumber == 3){TIM3_CH2_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH2(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){TIM3_CH2_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH2_Capture_FristValue_3 - TIM3_CH2_Capture_FristValue_2; }else{Value_Temp2 = TIM3_CH2_Capture_FristValue_3 - TIM3_CH2_Capture_FristValue_2;Value_Temp2 = Value_Temp2>0?Value_Temp2:0;TIM3_CH2_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp2; }// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_FALLING); TIM3_CH2_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH2_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH2,LL_TIM_IC_POLARITY_RISING); TIM3_CH2_CaptureNumber = 1;TIM3_OverCnt = 0;} } //------------------------------------------CC3if(LL_TIM_IsActiveFlag_CC3(TIM3)){ LL_TIM_ClearFlag_CC3(TIM3);if(TIM3_CH3_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH3_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH3_CaptureNumber == 1){TIM3_OverCnt = 0;TIM3_CH3_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_FALLING); TIM3_CH3_CaptureNumber = 2; }elseif(TIM3_CH3_CaptureNumber == 2){TIM3_CH3_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH3_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH3_Capture_FristValue_2 - TIM3_CH3_Capture_FristValue_1; } else{Value_Temp3 = TIM3_CH3_Capture_FristValue_2 - TIM3_CH3_Capture_FristValue_1;Value_Temp3 = Value_Temp3>0?Value_Temp3:0; TIM3_CH3_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp3;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_RISING); TIM3_CH3_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH3_CaptureNumber == 3){TIM3_CH3_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH3(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH3_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH3_Capture_FristValue_3 - TIM3_CH3_Capture_FristValue_2; } else{Value_Temp3 = TIM3_CH3_Capture_FristValue_3 - TIM3_CH3_Capture_FristValue_2;Value_Temp3 = Value_Temp3>0?Value_Temp3:0; TIM3_CH3_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp3;} // //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_FALLING); TIM3_CH3_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH3_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH3,LL_TIM_IC_POLARITY_RISING); TIM3_CH3_CaptureNumber = 1;TIM3_OverCnt = 0;} }//------------------------------------------CC4if(LL_TIM_IsActiveFlag_CC4(TIM3)){ LL_TIM_ClearFlag_CC4(TIM3);if(TIM3_CH4_CaptureNumber == 0){TIM3_OverCnt = 0;TIM3_CH4_CaptureNumber = 1;
// LL_TIM_SetCounter(TIM3,0); }elseif(TIM3_CH4_CaptureNumber == 1){TIM3_OverCnt = 0;TIM3_CH4_Capture_FristValue_1 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 //设置下降沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_FALLING); TIM3_CH4_CaptureNumber = 2;}elseif(TIM3_CH4_CaptureNumber == 2){TIM3_CH4_Capture_FristValue_2 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH4_Capture_HighLevel = TIM3_OverCnt * 65535 + TIM3_CH4_Capture_FristValue_2 - TIM3_CH4_Capture_FristValue_1; } else{Value_Temp4 = TIM3_CH4_Capture_FristValue_2 - TIM3_CH4_Capture_FristValue_1;Value_Temp4 = Value_Temp4>0?Value_Temp4:0; TIM3_CH4_Capture_HighLevel = TIM3_OverCnt * 65535 + Value_Temp4;} //设置上升沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_RISING); TIM3_CH4_CaptureNumber = 3;TIM3_OverCnt = 0;}elseif(TIM3_CH4_CaptureNumber == 3){TIM3_CH4_Capture_FristValue_3 = LL_TIM_IC_GetCaptureCH4(TIM3); // 获取当前的捕获值. 即CCRx2 if(TIM3_OverCnt >= 1){ TIM3_CH4_Capture_LowLevel = TIM3_OverCnt * 65535 + TIM3_CH4_Capture_FristValue_3 - TIM3_CH4_Capture_FristValue_2; } else{Value_Temp4 = TIM3_CH4_Capture_FristValue_3 - TIM3_CH4_Capture_FristValue_2;Value_Temp4 = Value_Temp4>0?Value_Temp4:0; TIM3_CH4_Capture_LowLevel = TIM3_OverCnt * 65535 + Value_Temp4; } // //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_FALLING); TIM3_CH4_CaptureNumber = 4;TIM3_OverCnt = 0;} elseif(TIM3_CH4_CaptureNumber == 4){// //设置 沿触发LL_TIM_IC_SetPolarity(TIM3,LL_TIM_CHANNEL_CH4,LL_TIM_IC_POLARITY_RISING); TIM3_CH4_CaptureNumber = 1;TIM3_OverCnt = 0;} } //------------------------------------------Updateif(LL_TIM_IsActiveFlag_UPDATE(TIM3)){ LL_TIM_ClearFlag_UPDATE(TIM3); //每次溢出时间为65536usTIM3_OverCnt++;}}#ifndef __TIM_H__
#define __TIM_H__#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "main.h"void MX_TIM2_Init(void);
void MX_TIM3_Init(void);
void TIM3_CallBack(void);#ifdef __cplusplus
}
#endif#endif /* __TIM_H__ */#include "main.h"
#include "tim.h"
#include "gpio.h"void SystemClock_Config(void);int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_TIM2_Init();MX_TIM3_Init();while (1){}}/*** @brief This function handles TIM3 global interrupt.*/
void TIM3_IRQHandler(void)
{TIM3_CallBack();}
相关文章:
STM32 LL库 TIM3定时器多通道捕获输入采集
为什么不用HAL库,使用HAL库捕获输入一个通道还尚可,多通道捕获由于HAL的回调函数不符合我的要求,干脆直接切换到LL库。网上找了许多,代码处理写的不符合我的要求,这里记录一下我的调试过程。 TIM2输出1路PWM信号&#…...

如何为初创企业选择合适的 ERP 系统?
**ERP系统**是制造、分销、供应链、金融、会计、风险管理等多个行业必不可少的企业技术解决方案。不论垂直行业、企业规模或目标受众如何,将ERP作为企业管理战略的核心部分都非常重要。 对于渴望发展的小型企业和初创企业来说,更是如此。大型企业需要对…...

jssip contact的随机字符串的问题
let configuration {sockets: [socket],uri: sip:1001127.0.0.1,}; 如果这样注册freesswitch,那么fs注册信息中的Contact字段信息就是:sip:sdfsdfsdfsfcvdwvdwd.invalid;transportws;fs_natyes;fs_path... 正确的写法是: //URI是jssip内置…...
别再吐槽大学教材了,来看看这些网友强推的数学神作!
前言 关于大学数学教材的吐槽似乎从来没停止过。有人慨叹:数学教材晦涩难懂。错!难懂,起码还可以读懂。数学教材你根本读不懂;也有人说:数学教材简直就是天书。 数学教材有好有坏,这话不假,但更…...

Elasticsearch-汇总
Elasticsearch-基础介绍 跳转 分布式全文搜索引擎:包含【实时搜索】和【分析引擎】 Elasticsearch-倒排索引 跳转 倒排索引 跳转 Elasticsearch-Term Dictionary和Term Index 跳转 lucene-基础介绍 跳转 Elasticsearch-联合索引 跳转 Elasticsearch-Roaring B…...
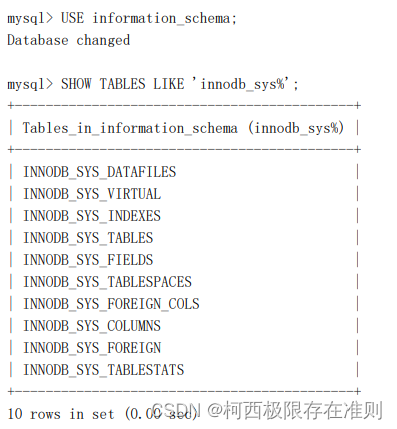
9.3 【MySQL】系统表空间
了解完了独立表空间的基本结构,系统表空间的结构也就好理解多了,系统表空间的结构和独立表空间基本类似,只不过由于整个MySQL进程只有一个系统表空间,在系统表空间中会额外记录一些有关整个系统信息的页面,所以会比独立…...

STM32CUBEIDE生成hex文件 Release版本的下载不启动
现象描述: 使用STM32CUBEIDE生成hex文件,使用脱机下载器或者J-Flash下载到单片机中(STM32F407)单片机不启动。 测试其他的程序是可以启动的。 修改办法: 把Release版本切换到debug版本,重新编写…...

2023年亚太杯数学建模思路 - 复盘:校园消费行为分析
文章目录 0 赛题思路1 赛题背景2 分析目标3 数据说明4 数据预处理5 数据分析5.1 食堂就餐行为分析5.2 学生消费行为分析 建模资料 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 赛题背景 校园一卡通是集…...

ceph集群移除物理节点
1. 概述 ceph分布式存储在生产或者实验环境,经常涉及到物理节点加入或者删除,本文仅对移除物理节点的相关步骤做了操作记录,以方便需要时查阅。 2. 移除物理节点 2.1 out掉相应osd 操作之前通过ceph -s确保整个集群状态是OK的,…...
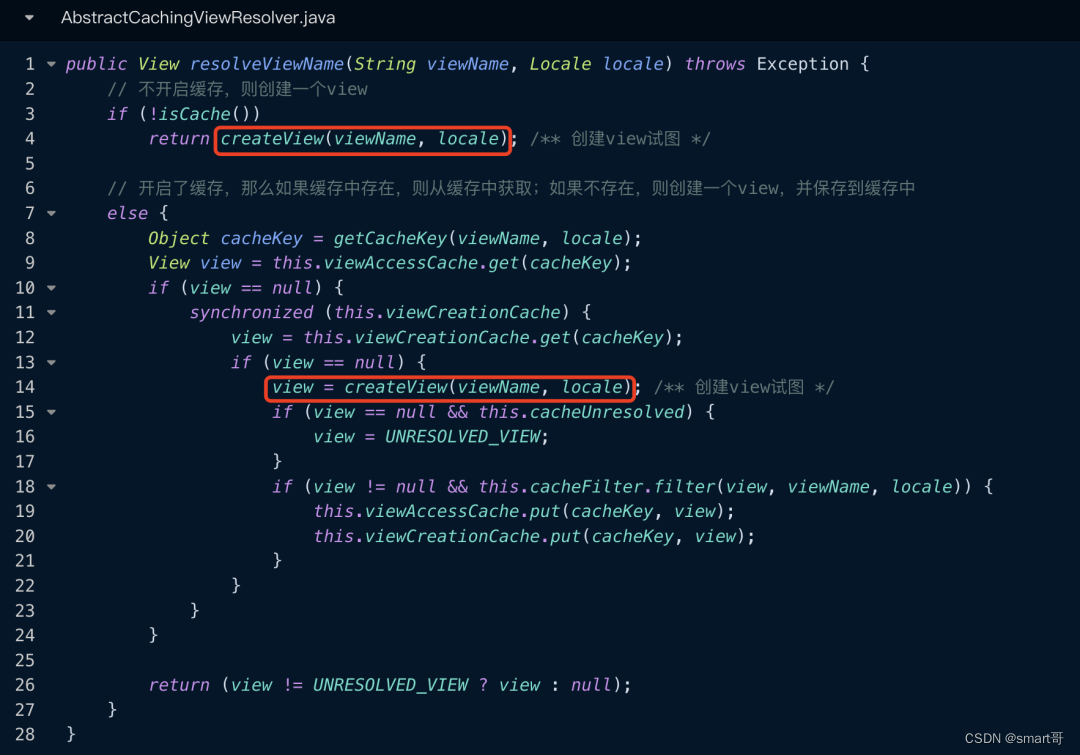
(八)Spring源码解析:Spring MVC
一、Servlet及上下文的初始化 1.1> DispatcherServlet的初始化 对于Spring MVC来说,最核心的一个类就是DispatcherServlet,它负责请求的行为流转。那么在Servlet的初始化阶段,会调用init()方法进行初始化操作,在DispatcherSe…...

maven或者gradle打完jar,jekins启动提示找不到问题
1、记录下遇到的一个问题,maven或者gradle打完jar,然后jekins发布,启动提示找不到实体类,mapper,xml问题 2、首先排查jar包中这些文件是否存在 3、然后排查每层的包名或者文件名是否能对应上 我这次遇到的问题就是本地…...

浏览器缓存sessionStorage、localStorage、Cookie
一、sessionStorage 1、简介 sessionStorage用于在浏览器会话期间存储数据,数据仅在当前会话期间有效。 存储的数据在用户关闭浏览器标签页或窗口后会被清除。 2、方法 使用sessionStorage.setItem(key, value)方法将数据存储在sessionStorage中。使用sessionSt…...

易点易动固定资产管理系统场景应用一:集成ERP/财务系统
在企业的日常运营中,固定资产管理是一个重要而繁琐的任务。传统的手工管理方式往往效率低下且容易出错,给企业带来不必要的成本和风险。为了解决这一问题,易点易动固定资产管理系统应运而生。本文将重点介绍易点易动固定资产管理系统在集成ER…...

k8s部署elk8 直接通过logstash获取日志文件方式
配置文件 kibana [rootnode101 config]# cat kibana.yml # # ** THIS IS AN AUTO-GENERATED FILE ** ## Default Kibana configuration for docker target server.host: "0.0.0.0" server.shutdownTimeout: "5s" elasticsearch.hosts: [ "http:/…...

git 本地多个账号错乱问题解决
当我们在本地有多个git账号时,例如公司的gitlab有一个git账号,自己的开源项目有一个GitHub账号,我们可能会出现账号错乱的情况,例如提交到公司gitlab的代码是github账号 这种情况通常是由于您的git config配置文件中的用户信息未…...

wu-ui-uniapp 多平台快速开发的UI框架
WU-UI 多平台快速开发的UI框架(无论平台,一致体验) 官方群 wu-ui官方1群: 767943089 说明 wu-ui(如虎添翼) 是 全面兼容多端的uniapp生态框架,基于vue2、vue3和nvue开发。丰富组件库,便捷工具库,简单高效。无论平台&#x…...
Spring Boot Actuator:自定义端点
要在Spring Boot Actuator中实现自定义端点,可以按照以下步骤进行操作: 1.创建一个自定义端点类 该类需要使用Endpoint注解进行标记,并使用Component注解将其作为Spring Bean进行管理。 package com.example.highactuator.point;import lo…...
实时音视频方案汇总
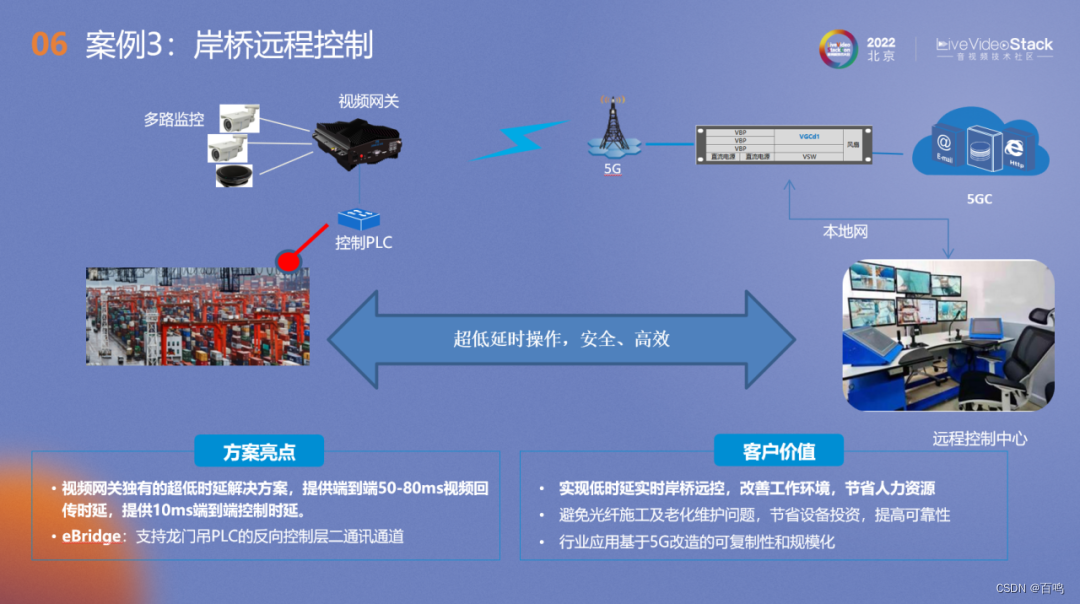
若有好的方案欢迎留言讨论,非常感谢,汇总了一些,从市面上了解的一些低时延的端到端的方案,仅供参照,若有问题,也欢迎留言更正! 方案 方案描述 时延 备注 1大华同轴高清电缆200米电缆…...

vue3.0中实现excel文件的预览
最近开发了一个需求,要求实现预览图片、pdf、excel、word、txt等格式的文件; 每种格式的文件想要实现预览的效果需要使用对应的插件,如果要实现excel格式文件的预览,要用到哪种插件呢? 答案:xlsx.full.min…...

信息学奥赛一本通 1435:【例题3】曲线 | 洛谷 洛谷 P1883 函数
【题目链接】 ybt 1435:【例题3】曲线 洛谷 P1883 函数 【题目考点】 1. 三分 【解题思路】 每个 S i ( x ) S_i(x) Si(x)是一个二次函数, F ( x ) m a x ( S i ( x ) ) F(x) max(S_i(x)) F(x)max(Si(x)),即为所有二次函数当自变量…...

conda相比python好处
Conda 作为 Python 的环境和包管理工具,相比原生 Python 生态(如 pip 虚拟环境)有许多独特优势,尤其在多项目管理、依赖处理和跨平台兼容性等方面表现更优。以下是 Conda 的核心好处: 一、一站式环境管理:…...
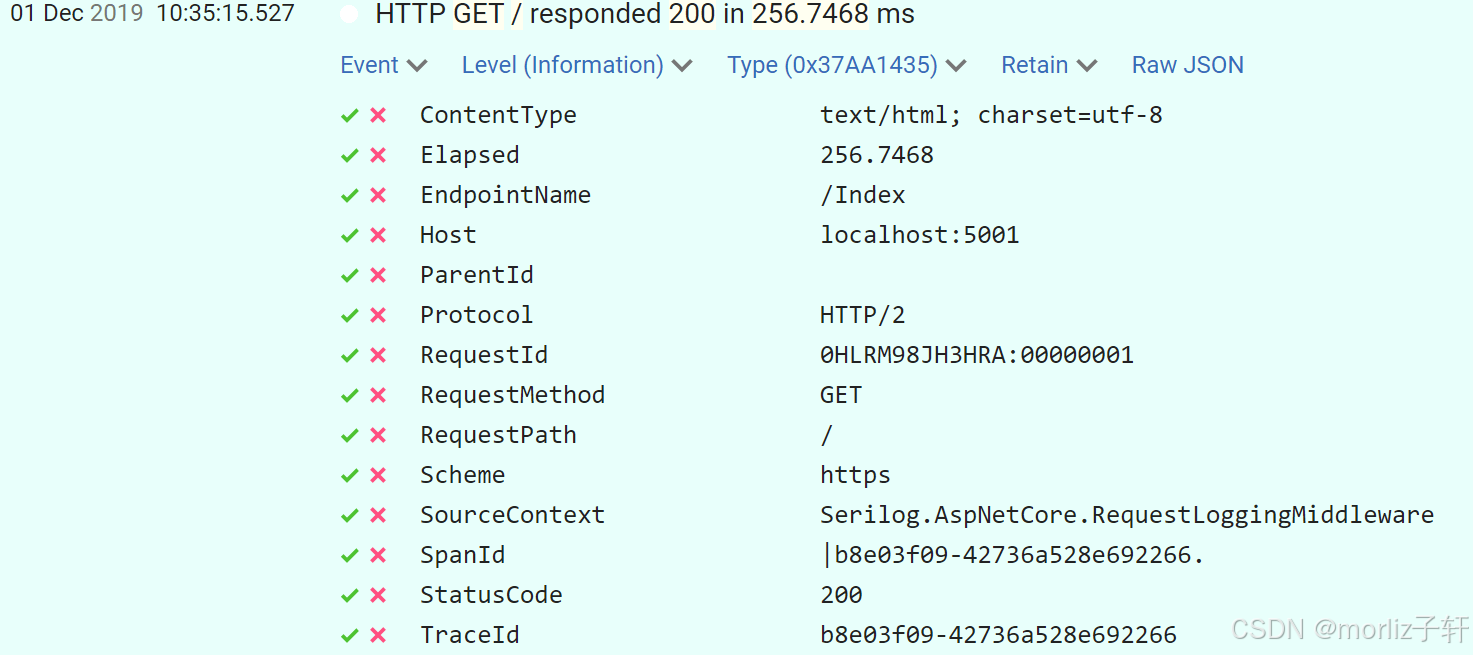
深入浅出Asp.Net Core MVC应用开发系列-AspNetCore中的日志记录
ASP.NET Core 是一个跨平台的开源框架,用于在 Windows、macOS 或 Linux 上生成基于云的新式 Web 应用。 ASP.NET Core 中的日志记录 .NET 通过 ILogger API 支持高性能结构化日志记录,以帮助监视应用程序行为和诊断问题。 可以通过配置不同的记录提供程…...
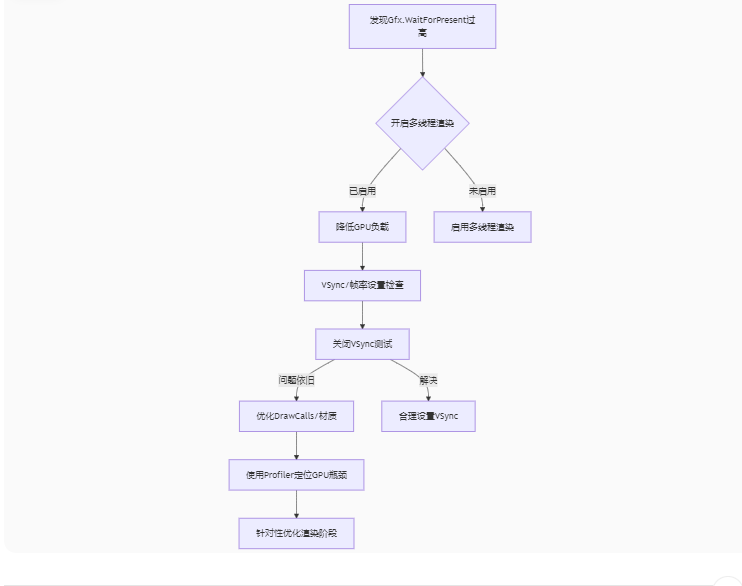
Unity3D中Gfx.WaitForPresent优化方案
前言 在Unity中,Gfx.WaitForPresent占用CPU过高通常表示主线程在等待GPU完成渲染(即CPU被阻塞),这表明存在GPU瓶颈或垂直同步/帧率设置问题。以下是系统的优化方案: 对惹,这里有一个游戏开发交流小组&…...

AI Agent与Agentic AI:原理、应用、挑战与未来展望
文章目录 一、引言二、AI Agent与Agentic AI的兴起2.1 技术契机与生态成熟2.2 Agent的定义与特征2.3 Agent的发展历程 三、AI Agent的核心技术栈解密3.1 感知模块代码示例:使用Python和OpenCV进行图像识别 3.2 认知与决策模块代码示例:使用OpenAI GPT-3进…...

转转集团旗下首家二手多品类循环仓店“超级转转”开业
6月9日,国内领先的循环经济企业转转集团旗下首家二手多品类循环仓店“超级转转”正式开业。 转转集团创始人兼CEO黄炜、转转循环时尚发起人朱珠、转转集团COO兼红布林CEO胡伟琨、王府井集团副总裁祝捷等出席了开业剪彩仪式。 据「TMT星球」了解,“超级…...
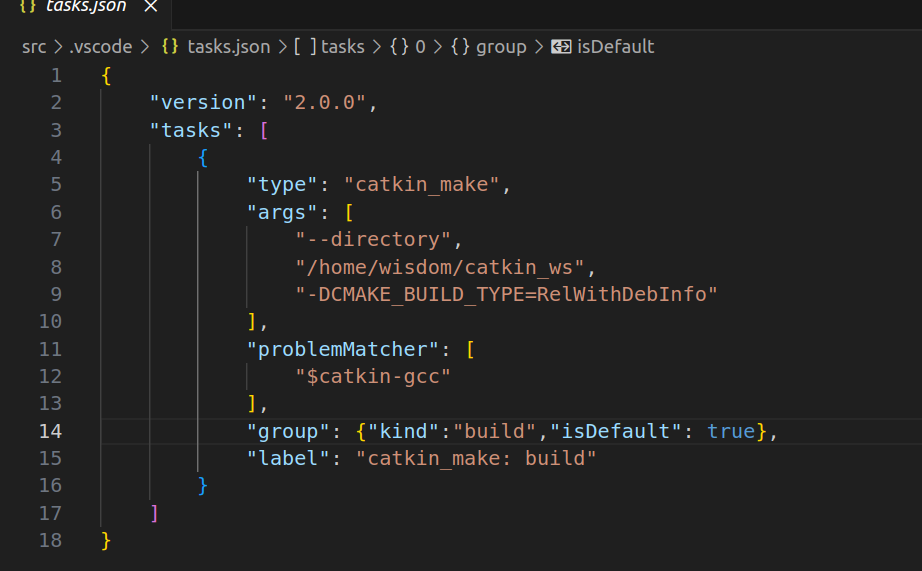
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...
)
安卓基础(Java 和 Gradle 版本)
1. 设置项目的 JDK 版本 方法1:通过 Project Structure File → Project Structure... (或按 CtrlAltShiftS) 左侧选择 SDK Location 在 Gradle Settings 部分,设置 Gradle JDK 方法2:通过 Settings File → Settings... (或 CtrlAltS)…...
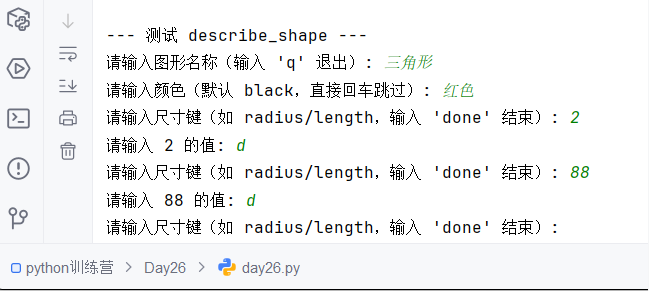
Python训练营-Day26-函数专题1:函数定义与参数
题目1:计算圆的面积 任务: 编写一个名为 calculate_circle_area 的函数,该函数接收圆的半径 radius 作为参数,并返回圆的面积。圆的面积 π * radius (可以使用 math.pi 作为 π 的值)要求:函数接收一个位置参数 radi…...

Pydantic + Function Calling的结合
1、Pydantic Pydantic 是一个 Python 库,用于数据验证和设置管理,通过 Python 类型注解强制执行数据类型。它广泛用于 API 开发(如 FastAPI)、配置管理和数据解析,核心功能包括: 数据验证:通过…...