Python+Yolov5跌倒检测 摔倒检测 人物目标行为 人体特征识别
Python+Yolov5跌倒检测 摔倒检测 人物目标行为 人体特征识别
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
前言
这篇博客针对<<Python+Yolov5跌倒摔倒人体特征识别>>编写代码,代码整洁,规则,易读。 学习与应用推荐首选。
文章目录
一、所需工具软件
二、使用步骤
1. 引入库
2. 识别图像特征
3. 参数设置
4. 运行结果
三、在线协助
一、所需工具软件
1. Pycharm, Python
2. Qt, OpenCV
二、使用步骤
1.引入库
代码如下(示例):
import cv2
import torch
from numpy import randomfrom models.experimental import attempt_load
from utils.datasets import LoadStreams, LoadImages
from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier, \scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
2.识别图像特征
代码如下(示例):
defdetect(save_img=False):source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_sizewebcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(('rtsp://', 'rtmp://', 'http://'))# Directoriessave_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run(save_dir / 'labels'if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir# Initializeset_logging()device = select_device(opt.device)half = device.type != 'cpu'# half precision only supported on CUDA# Load modelmodel = attempt_load(weights, map_location=device) # load FP32 modelstride = int(model.stride.max()) # model strideimgsz = check_img_size(imgsz, s=stride) # check img_sizeif half:model.half() # to FP16# Second-stage classifierclassify = Falseif classify:modelc = load_classifier(name='resnet101', n=2) # initializemodelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()# Set Dataloadervid_path, vid_writer = None, Noneif webcam:view_img = check_imshow()cudnn.benchmark = True# set True to speed up constant image size inferencedataset = LoadStreams(source, img_size=imgsz, stride=stride)else:save_img = Truedataset = LoadImages(source, img_size=imgsz, stride=stride)# Get names and colorsnames = model.module.names ifhasattr(model, 'module') else model.namescolors = [[random.randint(0, 255) for _ inrange(3)] for _ in names]# Run inferenceif device.type != 'cpu':model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run oncet0 = time.time()for path, img, im0s, vid_cap in dataset:img = torch.from_numpy(img).to(device)img = img.half() if half else img.float() # uint8 to fp16/32img /= 255.0# 0 - 255 to 0.0 - 1.0if img.ndimension() == 3:img = img.unsqueeze(0)# Inferencet1 = time_synchronized()pred = model(img, augment=opt.augment)[0]# Apply NMSpred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)t2 = time_synchronized()# Apply Classifierif classify:pred = apply_classifier(pred, modelc, img, im0s)# Process detectionsfor i, det inenumerate(pred): # detections per imageif webcam: # batch_size >= 1p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.countelse:p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)p = Path(p) # to Pathsave_path = str(save_dir / p.name) # img.jpgtxt_path = str(save_dir / 'labels' / p.stem) + (''if dataset.mode == 'image'elsef'_{frame}') # img.txts += '%gx%g ' % img.shape[2:] # print stringgn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwhiflen(det):# Rescale boxes from img_size to im0 sizedet[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()# Write resultsfor *xyxy, conf, cls inreversed(det):if save_txt: # Write to filexywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywhline = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label formatwithopen(txt_path + '.txt', 'a') as f:f.write(('%g ' * len(line)).rstrip() % line + '\n')if save_img or view_img: # Add bbox to imagelabel = f'{names[int(cls)]}{conf:.2f}'plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)# Print time (inference + NMS)print(f'{s}Done. ({t2 - t1:.3f}s)')# Save results (image with detections)if save_img:if dataset.mode == 'image':cv2.imwrite(save_path, im0)else: # 'video'if vid_path != save_path: # new videovid_path = save_pathifisinstance(vid_writer, cv2.VideoWriter):vid_writer.release() # release previous video writerfourcc = 'mp4v'# output video codecfps = vid_cap.get(cv2.CAP_PROP_FPS)w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*fourcc), fps, (w, h))vid_writer.write(im0)if save_txt or save_img:s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}"if save_txt else''print(f"Results saved to {save_dir}{s}")print(f'Done. ({time.time() - t0:.3f}s)')print(opt)check_requirements()with torch.no_grad():if opt.update: # update all models (to fix SourceChangeWarning)for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:detect()strip_optimizer(opt.weights)else:detect()
3.参数定义
代码如下(示例):
if __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('--weights', nargs='+', type=str, default='yolov5_best_road_crack_recog.pt', help='model.pt path(s)')parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')parser.add_argument('--view-img', action='store_true', help='display results')parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')parser.add_argument('--classes', nargs='+', type=int, default='0', help='filter by class: --class 0, or --class 0 2 3')parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')parser.add_argument('--augment', action='store_true', help='augmented inference')parser.add_argument('--update', action='store_true', help='update all models')parser.add_argument('--project', default='runs/detect', help='save results to project/name')parser.add_argument('--name', default='exp', help='save results to project/name')parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')opt = parser.parse_args()print(opt)check_requirements()with torch.no_grad():if opt.update: # update all models (to fix SourceChangeWarning)for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:detect()strip_optimizer(opt.weights)else:detect()
运行结果如下



三、在线协助:
如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!
1)远程安装运行环境,代码调试
2)Qt, C++, Python入门指导
3)界面美化
4)软件制作
博主推荐文章:https://blog.csdn.net/alicema1111/article/details/123851014
个人博客主页:https://blog.csdn.net/alicema1111?type=blog
博主所有文章点这里:https://blog.csdn.net/alicema1111?type=blog
相关文章:
Python+Yolov5跌倒检测 摔倒检测 人物目标行为 人体特征识别
PythonYolov5跌倒检测 摔倒检测 人物目标行为 人体特征识别如需安装运行环境或远程调试,见文章底部个人QQ名片,由专业技术人员远程协助!前言这篇博客针对<<PythonYolov5跌倒摔倒人体特征识别>>编写代码,代码整洁&…...
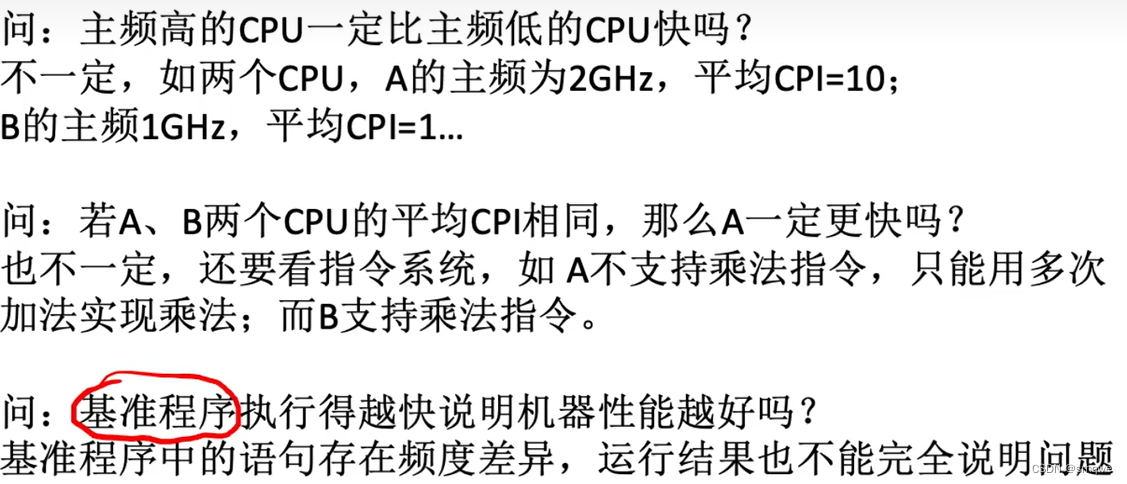
计算机底层:储存器的性能指标(CPU和内存等硬件的性能以及 对比标准)
计算机底层:储存器的性能指标(CPU和内存等硬件的性能以及 对比标准) 内存: MAR是存放地址的寄存器;MDR是存放数据的寄存器。 MAR是存放地址的寄存器,那么其中的二进制位一定是不能重复的,试想,如果有有两个…...

操作留痕功能实现与探讨
操作留痕功能实现与探讨 背景 接手了一个单体应用项目,看系统介绍,说实现了【高性能的操作日志留痕】功能,就有点好奇它是怎么设计的,是阻塞队列还是怎样的线程池。结果我打开代码一看,真的是笑洗个人了。它是做了一…...

深入浅出消息队列MSMQ
消息队列MSMQ,相信稍有开发经验的小伙伴都了解一些。开始讲解之前,我们先弄清楚一件事,为什么我们要使用MSMQ: 您可能认为您能够通过一个简单的数据库表(一个应用程序往其中写入数据,另一个应用程序从中读取数据)来应用…...
Maven多模块开发
POM主要功能 maven学习教程很多,就不在赘述可以参考以下网站,这里只说明maven实际运用。 https://blog.csdn.net/xwh3165037789/article/details/121545762 菜鸟教程 Maven POM POM是在使用Maven构建项目最重要的部分, POM 中所有信息位于&l…...

QT之OpenGL帧缓冲
QT之OpenGL帧缓冲1. 概述1.1 帧缓冲的创建与删除1.2 帧缓冲的数据来源1.2.1 数据源与帧缓冲的关系1.2.2 纹理Attachment1.2.3 渲染缓冲对象Attachment1.2.4 两者的区别1.2.5 关于两者的使用场景2. Demo3. 后期处理4. 参考1. 概述 OpenGL管线的最终渲染目的地被称作帧缓冲(fram…...
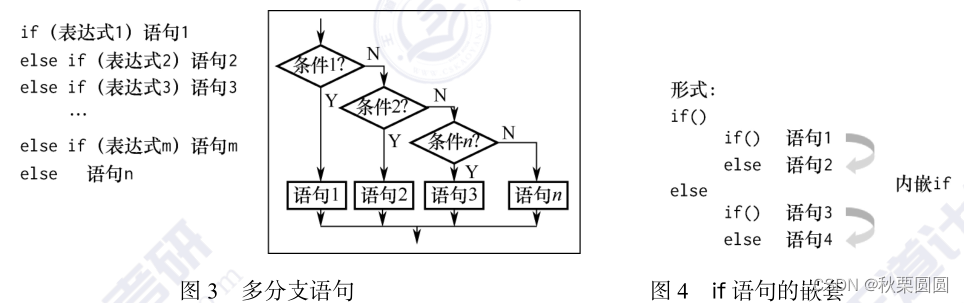
$ 6 :选择、循环
if-else语句 #include <stdio.h> //判断输入值是否大于0 int main() {int i;while (scanf("%d",&i)){if (i > 0)//不要在括号后加分号{printf("i is bigger than O\n");}else {printf("i is not bigger than O\n");}}return O; } …...
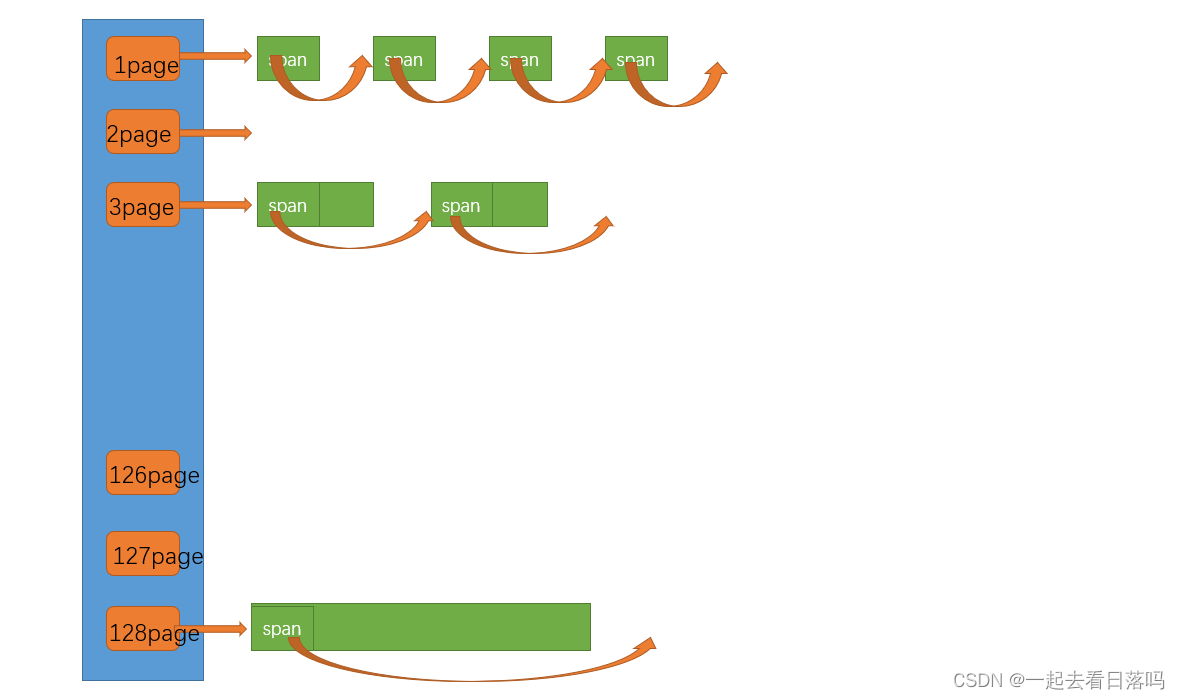
【项目设计】高并发内存池 (四)[pagecache实现]
🎇C学习历程:入门 博客主页:一起去看日落吗持续分享博主的C学习历程博主的能力有限,出现错误希望大家不吝赐教分享给大家一句我很喜欢的话: 也许你现在做的事情,暂时看不到成果,但不要忘记&…...
玩转qsort——“C”
各位CSDN的uu们你们好呀,今天小雅兰的内容还是我们的深度剖析指针呀,上篇博客我们学习了回调函数这个知识点,但是没有写完,因为:小雅兰觉得qsort值得单独写出来!!!好啦,就…...
【干货】又是一年跳槽季!Nginx 10道核心面试题及解析
Nginx是一款轻量级的高性能Web服务器和反向代理服务器,由俄罗斯的Igor Sysoev开发。它具有占用资源少、高并发、稳定性高等优点,被广泛应用于互联网领域。在Nginx的面试过程中,面试官通常会提出一些核心问题,本文将介绍一些常见的…...

【线程安全的HashMap有哪些,CurrentHashMap底层是怎么实现线程安全的】
在 Java 中,线程安全的 HashMap 通常有以下几种实现: Collections.synchronizedMap 方法:该方法可以将 HashMap 转换为线程安全的 Map。 Hashtable 类:Hashtable 是一种线程安全的集合类,它与 HashMap 类似࿰…...
C语言-结构体【详解】
一、 结构体的基础知识 结构是一些值的集合,这些值称为成员变量结构的每个成员可以是不同类型的变量 (1)结构体的声明 写法一: 注: 括号后边的分号不能忘结构体末尾可以不创建变量,在主函数中再创建 struc…...

浏览器输入url到页面渲染完成经历了哪些步骤
一、URL解析 这一步比较容易理解,在浏览器地址栏输入url后,浏览器会判断这个url的合法性 ,以及是否有可用缓存,如果判断是 url 则进行域名解析,如果不是 url ,则直接使用搜索引擎搜索 二、域名解析 输入…...

大数据技术之Hadoop(Yarn)
第1章Yarn资源调度器思考:1)如何管理集群资源?2)如何给任务合理分配资源?Yarn是一个资源调度平台,负责为运算程序提供服务器运算资源,相当于一个分布式的操作系统平台,而MapReduce等…...

5.建造者模式
目录 简介 四个角色 应用场景 实现步骤 和工厂模式的区别 简介 建造者模式也叫生成器模式,是一种对象构建模式;它可以把复杂对象的建造过程抽象出来(抽象类别),使这个抽象过程的不同实现方法可以构造出不同表现(属性)的对象;…...

数据库基础-数据库基本概念(1-1)
你好,欢迎来到数据库基础系列专栏,欢迎留言互动哦~ 目录一、数据库基础1. 数据库基本概念1.1 数据库1.2 什么是数据库管理软件1.3 表1.4 行1.5 列和数据类型1.6 主键1.7 什么是 SQL一、数据库基础 1. 数据库基本概念 1.1 数据库 数据库是一个以某种有…...

学习笔记-架构的演进之服务容错策略-服务发现-3月day01
文章目录前言服务容错容错策略附前言 “容错性设计”(Design for Failure)是微服务的一个核心原则。 使用微服务架构,拆分出的服务越来越多,也逐渐导致以下问题: 某一个服务的崩溃,会导致所有用到这个服务…...
采编式AIGC视频生产流程编排实践
作者 | 百度人工智能创作团队 导读 本文从业务出发,系统介绍了采编式 TTV的实现逻辑和实现路径。结合业务拆解,实现了一个轻量级服务编排引擎,有效实现业务诉求、高效支持业务扩展。 全文6451字,预计阅读时间17分钟。 01 背景 近…...

Leetcode23. 合并k个升序链表
一、题目描述: 给你一个链表数组,每个链表都已经按升序排列。 请你将所有链表合并到一个升序链表中,返回合并后的链表。 示例 1: 输入:lists [[1,4,5],[1,3,4],[2,6]]输出:[1,1,2,3,4,4,5,6]解释&#…...

从用户出发,互联网产品策划方法论
【一】从用户到需求 产品经理需要具备两个非常重要的技能,一个叫策划,一个叫感知用户。 我们在分析问题的时候往往会说“这么做,我认为用户会怎么怎么样”、“用户会认为这样很不爽”,当我们这样说时,很有可能是把自己当成了用户,用某些特定的情感或记忆代表了用户。 当我…...
RocketMQ延迟消息机制
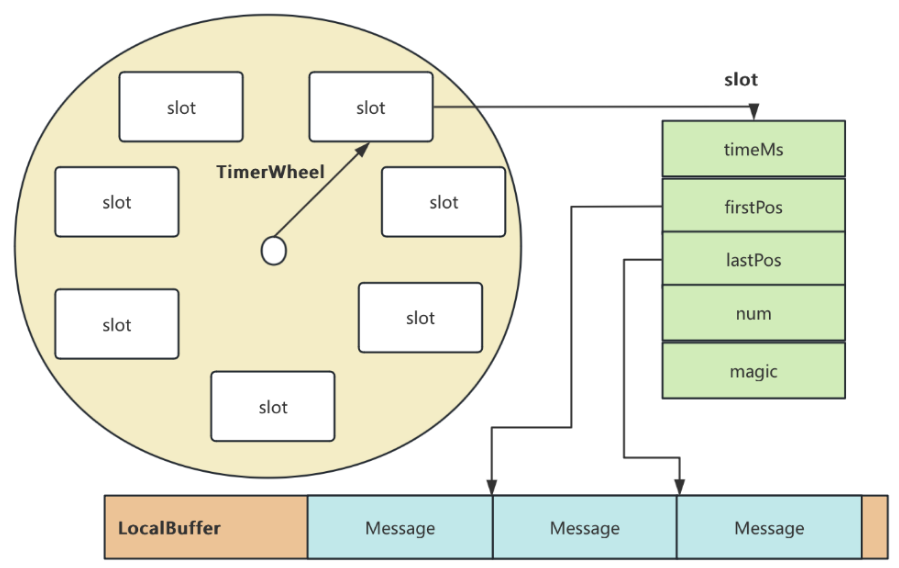
两种延迟消息 RocketMQ中提供了两种延迟消息机制 指定固定的延迟级别 通过在Message中设定一个MessageDelayLevel参数,对应18个预设的延迟级别指定时间点的延迟级别 通过在Message中设定一个DeliverTimeMS指定一个Long类型表示的具体时间点。到了时间点后…...

Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以?
Golang 面试经典题:map 的 key 可以是什么类型?哪些不可以? 在 Golang 的面试中,map 类型的使用是一个常见的考点,其中对 key 类型的合法性 是一道常被提及的基础却很容易被忽视的问题。本文将带你深入理解 Golang 中…...
:にする)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(33):にする 1、前言(1)情况说明(2)工程师的信仰2、知识点(1) にする1,接续:名词+にする2,接续:疑问词+にする3,(A)は(B)にする。(2)復習:(1)复习句子(2)ために & ように(3)そう(4)にする3、…...
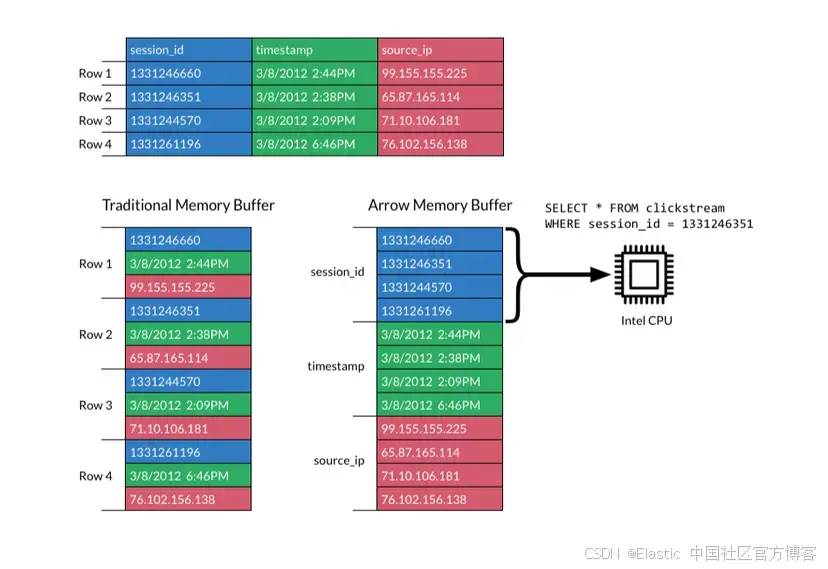
JavaScript 中的 ES|QL:利用 Apache Arrow 工具
作者:来自 Elastic Jeffrey Rengifo 学习如何将 ES|QL 与 JavaScript 的 Apache Arrow 客户端工具一起使用。 想获得 Elastic 认证吗?了解下一期 Elasticsearch Engineer 培训的时间吧! Elasticsearch 拥有众多新功能,助你为自己…...
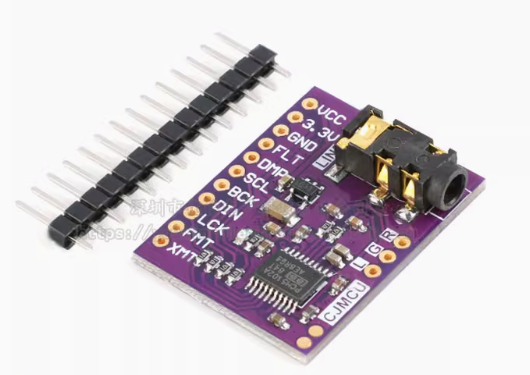
ESP32 I2S音频总线学习笔记(四): INMP441采集音频并实时播放
简介 前面两期文章我们介绍了I2S的读取和写入,一个是通过INMP441麦克风模块采集音频,一个是通过PCM5102A模块播放音频,那如果我们将两者结合起来,将麦克风采集到的音频通过PCM5102A播放,是不是就可以做一个扩音器了呢…...
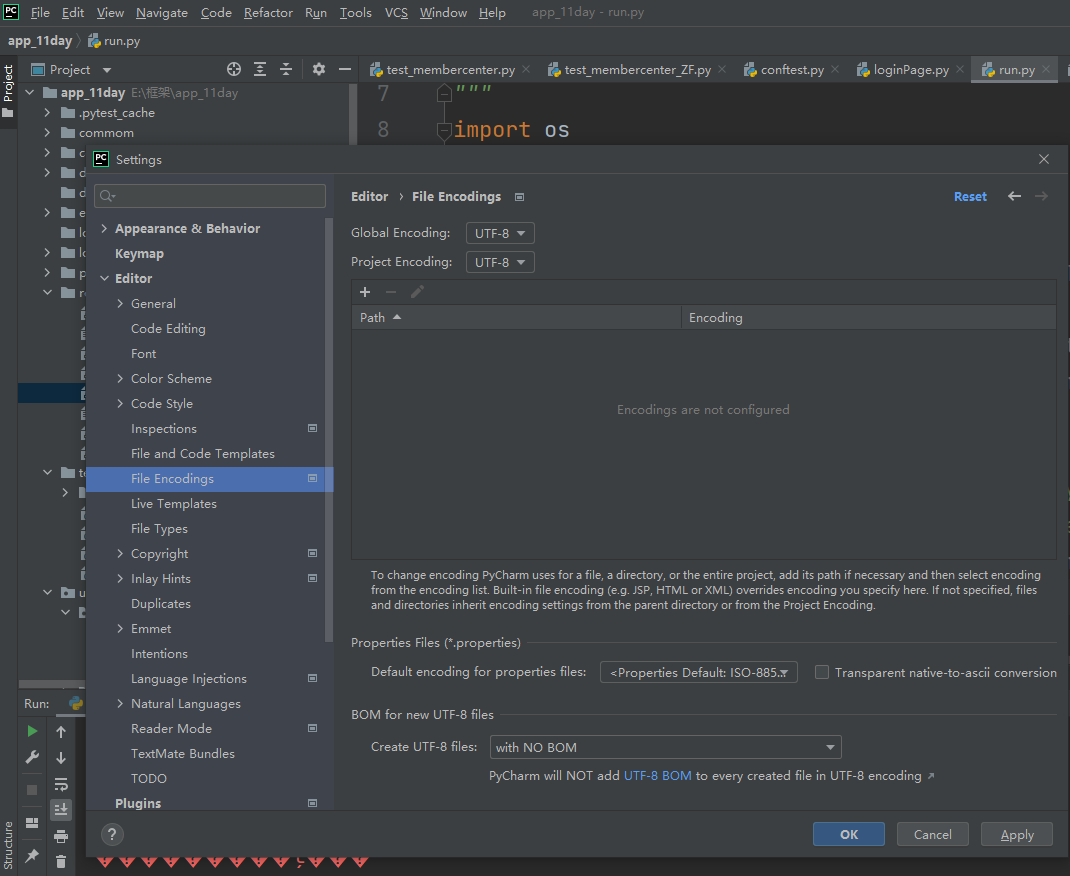
python执行测试用例,allure报乱码且未成功生成报告
allure执行测试用例时显示乱码:‘allure’ �����ڲ����ⲿ���Ҳ���ǿ�&am…...
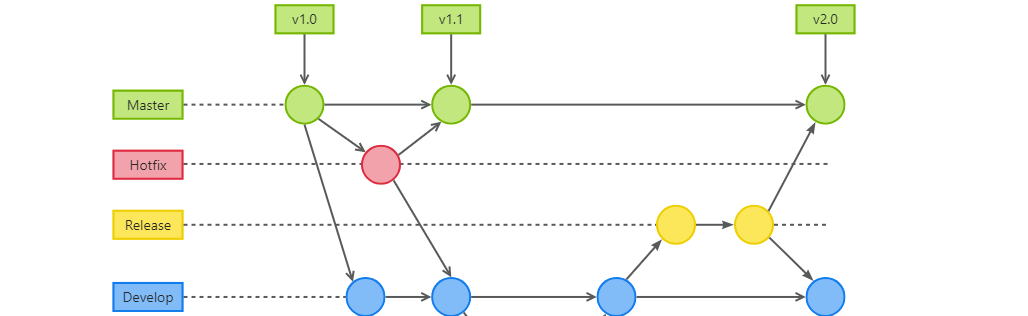
GitFlow 工作模式(详解)
今天再学项目的过程中遇到使用gitflow模式管理代码,因此进行学习并且发布关于gitflow的一些思考 Git与GitFlow模式 我们在写代码的时候通常会进行网上保存,无论是github还是gittee,都是一种基于git去保存代码的形式,这样保存代码…...
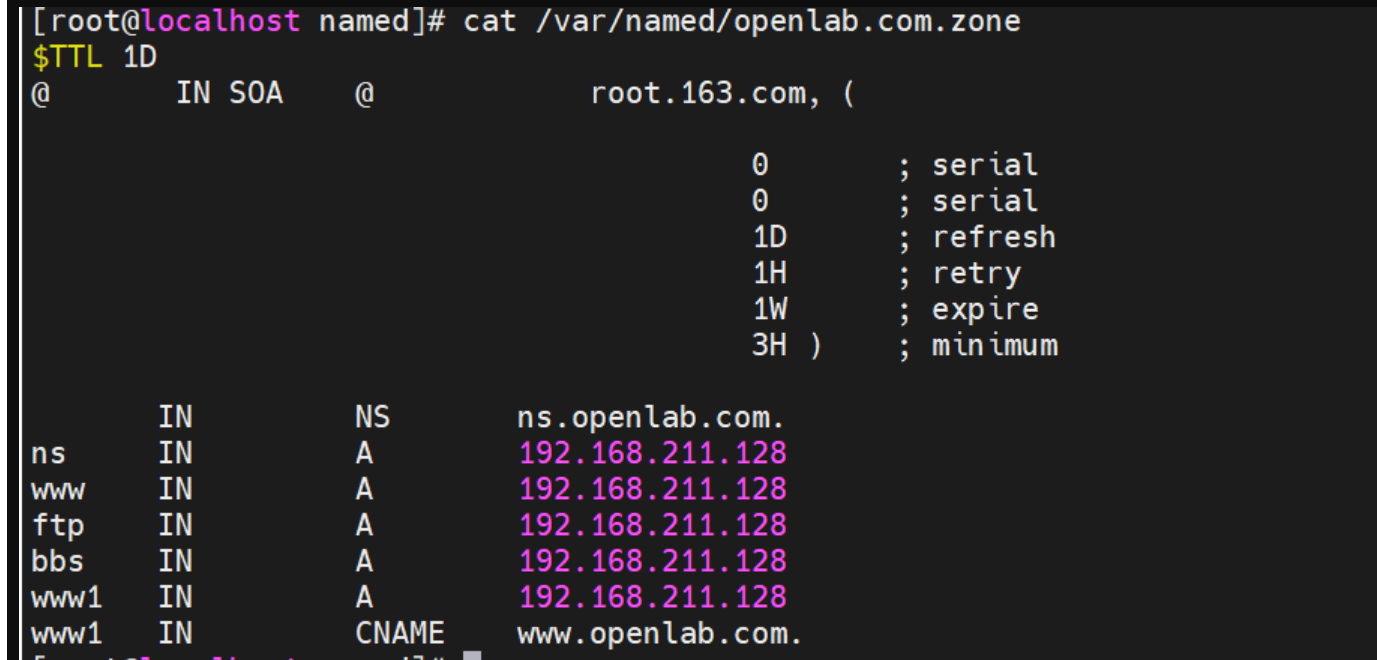
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
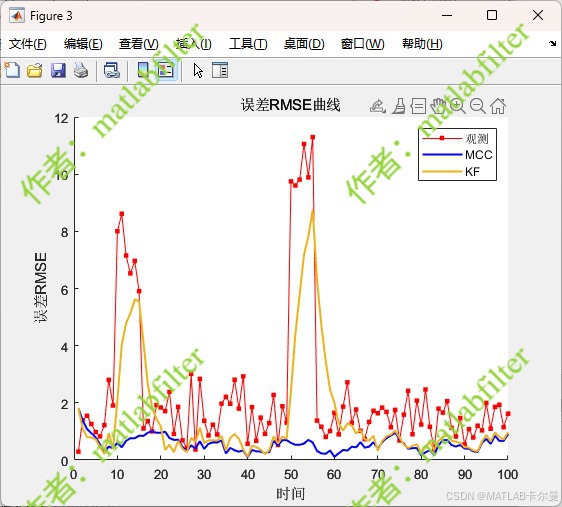
【MATLAB代码】基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),附源代码|订阅专栏后可直接查看
文章所述的代码实现了基于最大相关熵准则(MCC)的三维鲁棒卡尔曼滤波算法(MCC-KF),针对传感器观测数据中存在的脉冲型异常噪声问题,通过非线性加权机制提升滤波器的抗干扰能力。代码通过对比传统KF与MCC-KF在含异常值场景下的表现,验证了后者在状态估计鲁棒性方面的显著优…...

4. TypeScript 类型推断与类型组合
一、类型推断 (一) 什么是类型推断 TypeScript 的类型推断会根据变量、函数返回值、对象和数组的赋值和使用方式,自动确定它们的类型。 这一特性减少了显式类型注解的需要,在保持类型安全的同时简化了代码。通过分析上下文和初始值,TypeSc…...