0开始配置Cartographer建图和导航定位
0开始配置Cartographer
日期:12-19
硬件:激光雷达+IMU
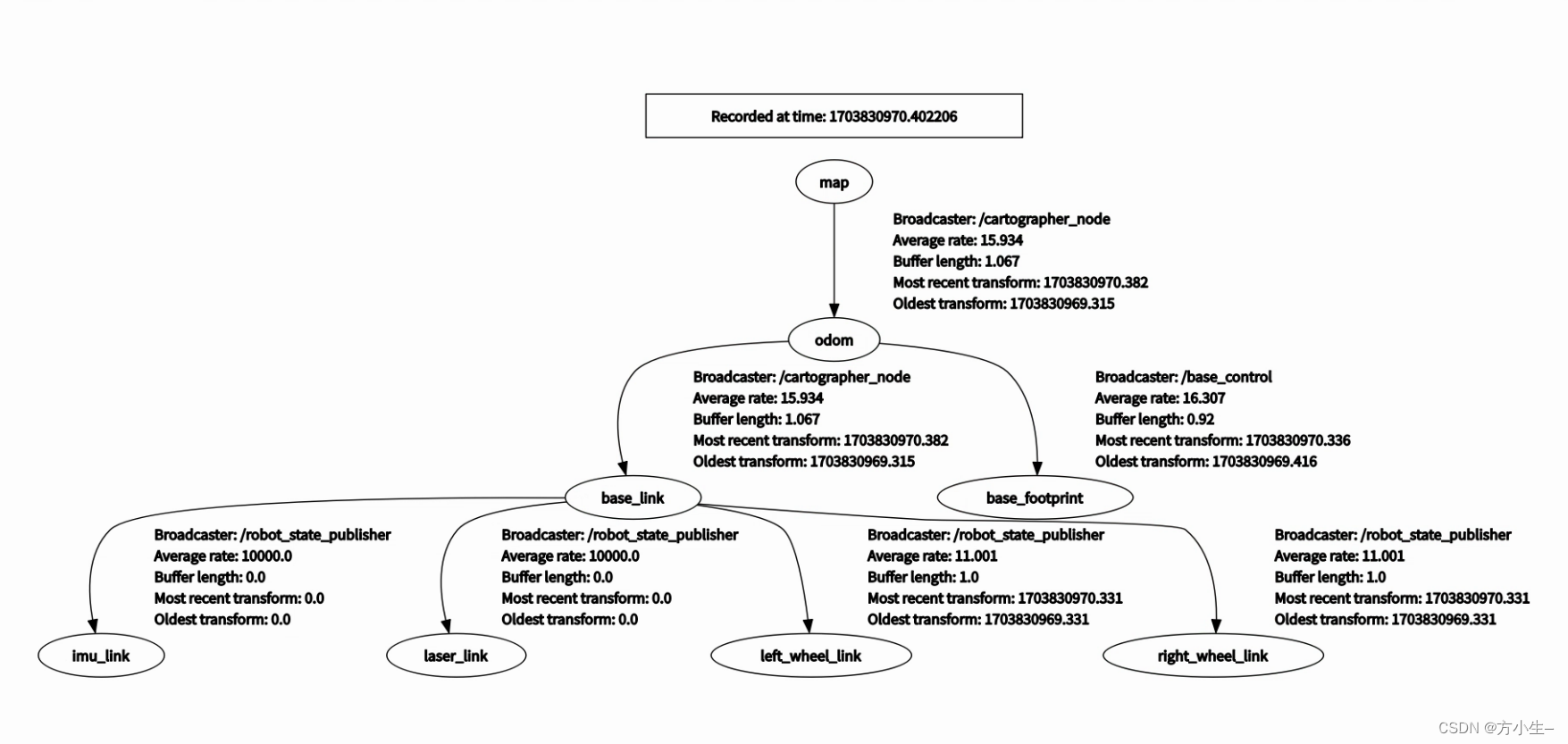
小车的tf变换:
建图配置
lua文件配置:my_robot.lua
include "map_builder.lua"
include "trajectory_builder.lua"options = {map_builder = MAP_BUILDER,trajectory_builder = TRAJECTORY_BUILDER,map_frame = "map",tracking_frame = "imu_link",published_frame = "base_link",odom_frame = "odom",provide_odom_frame = true,publish_frame_projected_to_2d = true,use_pose_extrapolator = false,use_odometry = false,use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 10,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,
}MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 10return optionslaunch配置:my_robot_map.launch
<launch><!-- <param name="robot_description"textfile="$(find cartographer_ros)/urdf/my_robot_2d.urdf" /><node name="robot_state_publisher" pkg="robot_state_publisher"type="robot_state_publisher" /> --><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename my_robot.lua"output="screen"><remap from="scan" to="scan" /><remap from="imu" to="imu" /><!-- <remap from="odom" to="odom" /> --></node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" /><node name="rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>源码修改
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
建图需要取消注释
// 注释不发送地图// occupancy_grid_publisher_.publish(*msg_ptr);
重新编译
catkin_make_isolated --install --use-ninja
source环境
catkin_make_isolated --install --use-ninja
运行并建图
启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动建图:
roslaunch cartographer_ros my_robot_map.launch
启动键盘控制:
roslaunch castlex_keyboard_control keyboard_control.launch
停止接收地图数据:
rosservice call /finish_trajectory 0
保存地图:
rosservice call /write_state "{filename: '/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream'}"
将地图转成png:
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/hgrobot/ws/src/castlex_navigation/maps/map -pbstream_filename=/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream -resolution=0.05
导航配置
源码修改:
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
导航需要注释
// 注释不发送地图// occupancy_grid_publisher_.publish(*msg_ptr);
launch配置:my_robot_2d_localization.launch
<launch><arg name="load_state_filename" default="/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream"/><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename my_robot_location.lua-load_state_filename $(arg load_state_filename)"output="screen"><remap from="scan" to="scan" /><remap from="imu" to="imu" /></node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05 " /> <!-- 增加是否纯定位模式参数pure_localization --></launch>lua文件配置:
include "my_robot.lua"TRAJECTORY_BUILDER.pure_localization_trimmer = {max_submaps_to_keep = 3,}POSE_GRAPH.optimize_every_n_nodes =100return options启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动定位:
注意小车启动位置要和开始位置一样
roslaunch cartographer_ros my_robot_2d_localization.launch
启动导航:
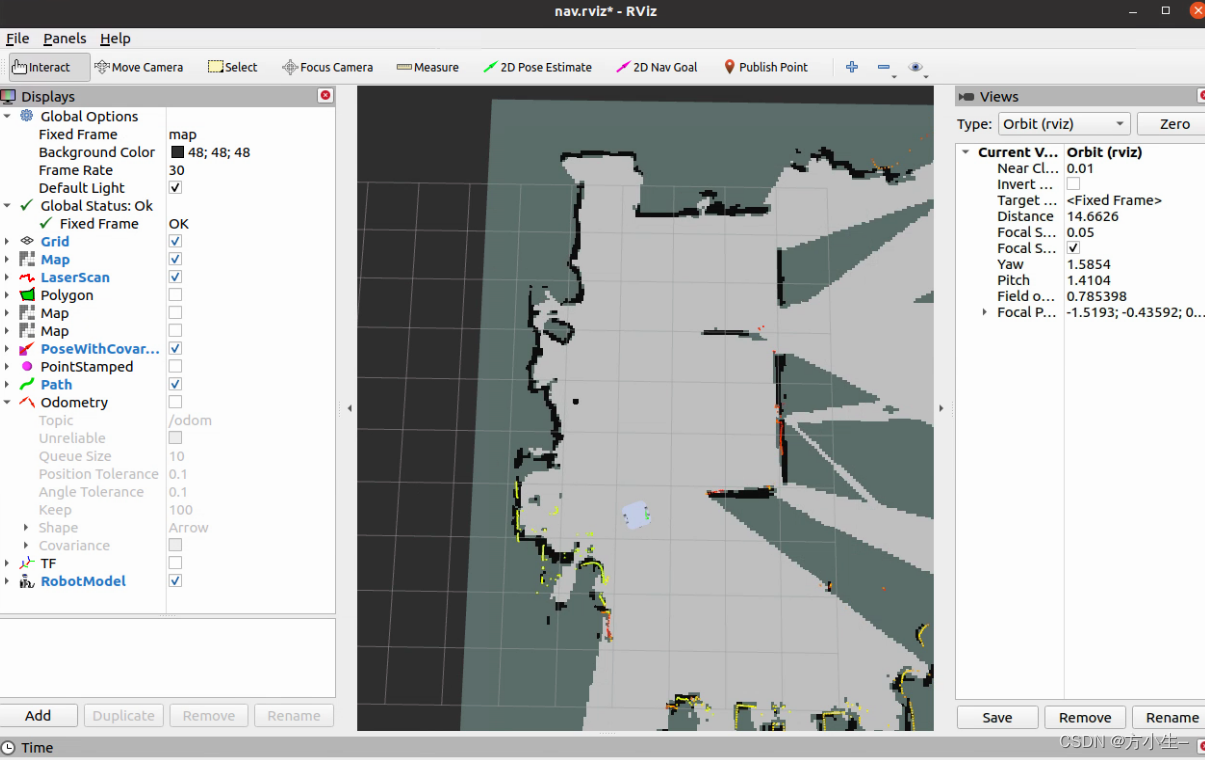
roslaunch castlex_navigation teb_nav.launch
遇到的问题:
编译错误—解决方法:删除build,重新编译
小车跳变—tf有问题,小车底盘发布的是odom-base_footprint的tf变换,没有发布base_footprint-base_link的变换,move_base设置的是base_link,map,odom。使用的是teb算法。
存在问题:
1.建图和定位切换需要修改源码
2.不能自动重定位
相关文章:
0开始配置Cartographer建图和导航定位
0开始配置Cartographer 日期:12-19 硬件:激光雷达IMU 小车的tf变换: 建图配置 lua文件配置:my_robot.lua include "map_builder.lua" include "trajectory_builder.lua"options {map_builder MAP_BUILDE…...

Python中使用SQLite数据库的方法2-2
3.3.2 创建表单及字段 通过“3.2 创建Cursor类的对象”中创建的Cursor类的对象cur创建表单及字段,代码如图5所示。 图5 创建表单及字段 从图5中可以看出,通过Cursor类的对象cur调用了Cursor类的execute()方法来执行SQL语句。该方法的参数即为要指定的S…...
零代码也能玩出花:Mugeda在H5设计中的魔法力量
文章目录 一、Mugeda零代码可视化H5设计工具简介二、Mugeda零代码可视化H5设计实战案例1. 注册并登录Mugeda账号2. 选择模板3. 编辑页面内容4. 添加动画效果5. 预览和发布 三、Mugeda零代码可视化H5设计的优势《Mugeda零代码可视化H5设计实战》内容简介作者简介目录前言/序言 随…...
分布式、CAP 和 BASE 理论
在计算机科学领域,分布式系统是一门极具挑战性的研究方向,也是互联网应用中必不可少的优化实践,而 CAP 理论和 BASE 理论则是分布式系统中的两个关键的概念。 什么是分布式系统 首先,让我们来谈谈分布式系统。你可以将分布式系统…...

django之drf框架(两个视图基类、5个扩展视图类、9个视图子类)
两个视图基类 APIView和GenericAPIView drf提供的最顶层的父类就是APIView,以后所有的类都继承自他 GenericAPIView继承自APIView,他里面封装了一些工能 基于APIViewModelSerializerResposne写5个接口 子路由:app01>>>urls.py …...

23种设计模式学习
设计模式的分类 总体来说设计模式分为三大类: 创建型模式,共五种:工厂方法模式、抽象工厂模式、单例模式、建造者模式、原型模式。 结构型模式,共七种:适配器模式、装饰器模式、代理模式、外观模式、桥接模式、组合…...

php 8.4 xdebug扩展编译安装方法
最新版php8.4 xdebug扩展只能通过编译方式安装, pecl是安装不了的, 编译方法如下 下载最新版xdebug git clone https://github.com/xdebug/xdebug.git 却换入xdebug目录执行编译安装xdebug cd xdebug phpize./configure --enable-xdebugmakemake install3. 配置启用xdebug 这…...

66biolinks v42.0.0 已注册 – 生物短链接、URL 缩短器、QR 码和 Web 工具 (SAAS) 源码
66biolinks v42.0.0:全能生物短链接与网络工具平台 一、开篇介绍 66biolinks v42.0.0是一款集生物链接、URL缩短器、二维码和网络工具于一体的综合性软件解决方案。作为社交生物链接平台的佼佼者,66biolinks提供了全方位的功能,旨在满足用户…...

《Vue2.X 进阶知识点》- 防 ElementUI Divider 分割线
前言 使用 el-divider 背景为白色是没问题的。 但当背景换成其它颜色,问题就出现了!! 仔细看原来是两层,默认背景色是白色。 想着把背景色改为透明应该能用,结果发现背面是一条实线,难怪要用白色遮挡…不符…...

【第十二课】KMP算法(acwing-831 / c++代码 / 思路 / 视频+博客讲解推荐)
目录 暴力做法 代码如下 KMP算法 不同的next求法-----视频讲解/博客推荐 视频推荐 博客推荐 课本上的方法- prefix的方法- 求next数组思路---next数组存放前缀表的方式 s和p匹配思路 代码如下 暴力做法 遍历s主串中每一个元素,如果该元素等于模板串p中…...

JSON 简介
JSON是什么?(了解) JSON(JavaScript Object Notation)是一种轻量级的数据交换格式,常用于Web应用程序之间的数据传输。 JSON格式是一种文本格式,用于描述数据的结构和内容。它由两种基本元素组成:键值对和…...

Impala4.x源码阅读笔记(三)——Impala如何管理Iceberg表元数据
前言 本文为笔者个人阅读Apache Impala源码时的笔记,仅代表我个人对代码的理解,个人水平有限,文章可能存在理解错误、遗漏或者过时之处。如果有任何错误或者有更好的见解,欢迎指正。 上一篇文章Impala4.x源码阅读笔记࿰…...

Ubuntu2204配置samba
0.前情说明 samba服务器主要是用来局域网共享文件的,如果想公网共享可能行不通,我已经踩坑一天了 所以说如果你想满足公网samba共享你就可以不要看下去了 1.参考连接 Ubuntu 安装 Samba 服务器_ubuntu安装samba服务器-CSDN博客 2.安装samba服务 sud…...
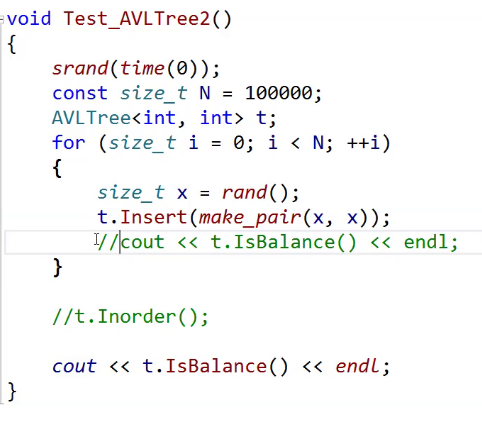
AVL树(超详解)
文章目录 前言AVL树的概念AVL树的实现定义AVL树insert 单旋左单旋右单旋左单旋代码右单旋代码 双旋左右双旋右左双旋 测试AVL树的性能 前言 AVL树是怎么来的呢? 我们知道搜索二叉树会存在退化问题,退化以后就变成单支或者接近单支。 它的效率就变成O(N)…...

禁止浏览器记住密码和自动填充 element-ui+vue
vue 根据element-ui 自定义密码输入框,防止浏览器 记住密码和自动填充 <template><divclass"el-password el-input":class"[size ? el-input-- size : , { is-disabled: disabled }]"><inputclass"el-input__inner"…...
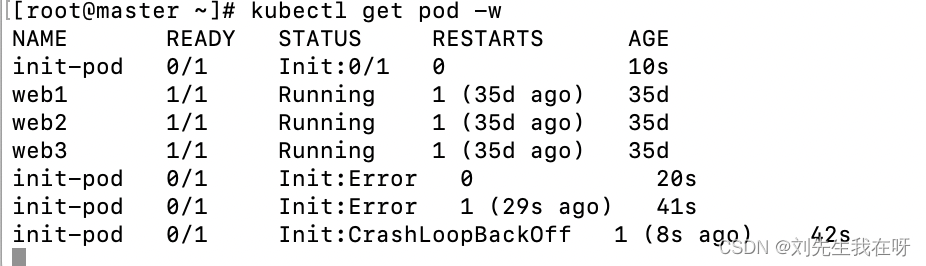
K8s实战-init容器
概念: 初始化容器的概念 比如一个容器A依赖其他容器,可以为A设置多个 依赖容易A1,A2,A3 A1,A2,A3要按照顺序启动,A1没有启动启动起来的 话,A2,A3是不会启动的,直到所有的静态容器全 部启动完毕…...

Vue3.2 自定义指令详解与实战
一、介绍 在Vue3中,自定义指令为开发者提供了一种灵活的方式来扩展Vue的HTML模板语法,使其能够执行特定的DOM操作或组件逻辑。不同于Vue2.x中的全局和局部指令注册方式,Vue3引入了Composition API,这使得自定义指令的编写和使用更…...

XV-3510CB振动陀螺仪传感器
XV-3510CB传感器是一款振动陀螺仪传感器,具有卓越的稳定性和可靠性,超小的封装尺寸SMD53.21.3mm,密封提供了良好的可持续环保能力,采用振动晶体,该传感器具有稳定的性能和超长的寿命。振动晶体的振动能够提供更为精确的…...

设计模式Java向
设计原则: 开闭原则: 用例对象和提供抽象功能进行分割,用例不变,抽象功能被实现,用于不断的扩展,于是源代码不需要进行修改,只在原有基础上进行抽象功能的实现从而进行代码扩展。不变源于代码…...
图片素材管理软件Eagle for mac提高素材整理维度
Eagle for mac是一款图片素材管理软件,支持藏网页图片,网页截屏,屏幕截图和标注,自动标签和筛选等功能,让你设计师方便存储需要的素材和查找,提供工作效率。 Eagle mac软件介绍 Eagle mac帮助你成为更好、…...
:OpenBCI_GUI:从环境搭建到数据可视化(下))
脑机新手指南(八):OpenBCI_GUI:从环境搭建到数据可视化(下)
一、数据处理与分析实战 (一)实时滤波与参数调整 基础滤波操作 60Hz 工频滤波:勾选界面右侧 “60Hz” 复选框,可有效抑制电网干扰(适用于北美地区,欧洲用户可调整为 50Hz)。 平滑处理&…...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...
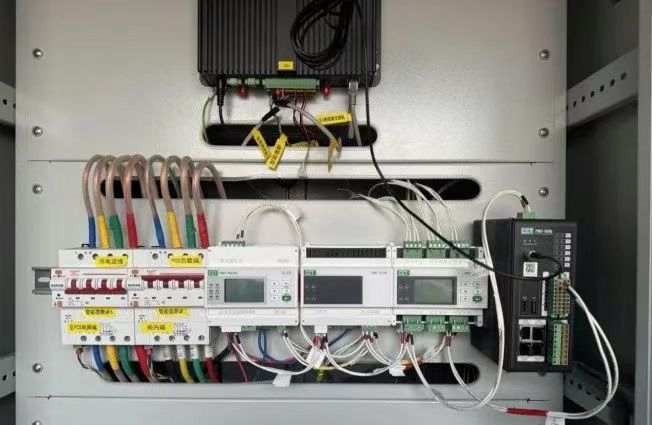
IT供电系统绝缘监测及故障定位解决方案
随着新能源的快速发展,光伏电站、储能系统及充电设备已广泛应用于现代能源网络。在光伏领域,IT供电系统凭借其持续供电性好、安全性高等优势成为光伏首选,但在长期运行中,例如老化、潮湿、隐裂、机械损伤等问题会影响光伏板绝缘层…...

【HTTP三个基础问题】
面试官您好!HTTP是超文本传输协议,是互联网上客户端和服务器之间传输超文本数据(比如文字、图片、音频、视频等)的核心协议,当前互联网应用最广泛的版本是HTTP1.1,它基于经典的C/S模型,也就是客…...

DeepSeek 技术赋能无人农场协同作业:用 AI 重构农田管理 “神经网”
目录 一、引言二、DeepSeek 技术大揭秘2.1 核心架构解析2.2 关键技术剖析 三、智能农业无人农场协同作业现状3.1 发展现状概述3.2 协同作业模式介绍 四、DeepSeek 的 “农场奇妙游”4.1 数据处理与分析4.2 作物生长监测与预测4.3 病虫害防治4.4 农机协同作业调度 五、实际案例大…...

Python 包管理器 uv 介绍
Python 包管理器 uv 全面介绍 uv 是由 Astral(热门工具 Ruff 的开发者)推出的下一代高性能 Python 包管理器和构建工具,用 Rust 编写。它旨在解决传统工具(如 pip、virtualenv、pip-tools)的性能瓶颈,同时…...
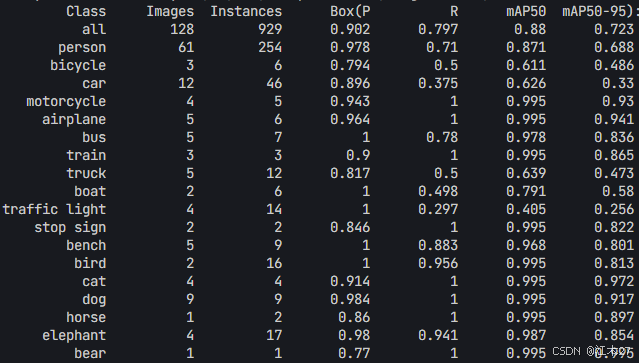
Yolov8 目标检测蒸馏学习记录
yolov8系列模型蒸馏基本流程,代码下载:这里本人提交了一个demo:djdll/Yolov8_Distillation: Yolov8轻量化_蒸馏代码实现 在轻量化模型设计中,**知识蒸馏(Knowledge Distillation)**被广泛应用,作为提升模型…...

【Go语言基础【12】】指针:声明、取地址、解引用
文章目录 零、概述:指针 vs. 引用(类比其他语言)一、指针基础概念二、指针声明与初始化三、指针操作符1. &:取地址(拿到内存地址)2. *:解引用(拿到值) 四、空指针&am…...
CSS3相关知识点
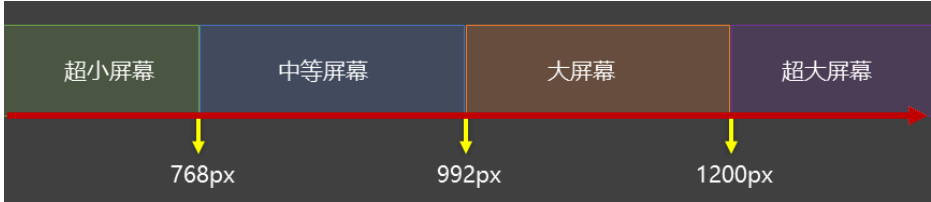
CSS3相关知识点 CSS3私有前缀私有前缀私有前缀存在的意义常见浏览器的私有前缀 CSS3基本语法CSS3 新增长度单位CSS3 新增颜色设置方式CSS3 新增选择器CSS3 新增盒模型相关属性box-sizing 怪异盒模型resize调整盒子大小box-shadow 盒子阴影opacity 不透明度 CSS3 新增背景属性ba…...

边缘计算网关提升水产养殖尾水处理的远程运维效率
一、项目背景 随着水产养殖行业的快速发展,养殖尾水的处理成为了一个亟待解决的环保问题。传统的尾水处理方式不仅效率低下,而且难以实现精准监控和管理。为了提升尾水处理的效果和效率,同时降低人力成本,某大型水产养殖企业决定…...