20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850
20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850
2023/12/29 11:10
开发板:Firefly的AIO-3399J【RK3399】
SDK:rk3399-android-11-r20211216.tar.xz【Android11】
Android11.0.tar.bz2.aa【ToyBrick】
Android11.0.tar.bz2.ab
Android11.0.tar.bz2.ac
https://wiki.t-firefly.com/AIO-3399J/prepare_compile_android.html
AIO-3399J产品规格书 立即购买
AIO-3399J 采用 RK3399 六核(A72x2+A53x4) 64 位处理器,主频高达1.8GHz,集成了四核 Mali-T860 GPU,性能优异。
1、简略步骤:
rootroot@rootroot-X99-Turbo:~/3TB$ cat Android11.0.tar.bz2.a* > Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ tar jxvf Android11.0.tar.bz2
rootroot@rootroot-X99-Turbo:~/3TB$ mv Android11.0 64rk3399-android-11
rootroot@rootroot-X99-Turbo:~/3TB$ cd 64rk3399-android-11
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ cd u-boot
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/u-boot$ ./make.sh rk3399
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/u-boot$ cd ..
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ cd kernel/
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/kernel$ make ARCH=arm64 rockchip_defconfig android-11.config -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11/kernel$ make ARCH=arm64 BOOT_IMG=../rockdev/Image-rk3399_Android11/boot.img rk3399-sapphire-excavator-edp-avb.img -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ source build/envsetup.sh
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ lunch
36. rk3399_Android11-userdebug
Which would you like? [aosp_arm-eng] 36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ make -j36
rootroot@rootroot-X99-Turbo:~/3TB/64rk3399-android-11$ ./build.sh -u
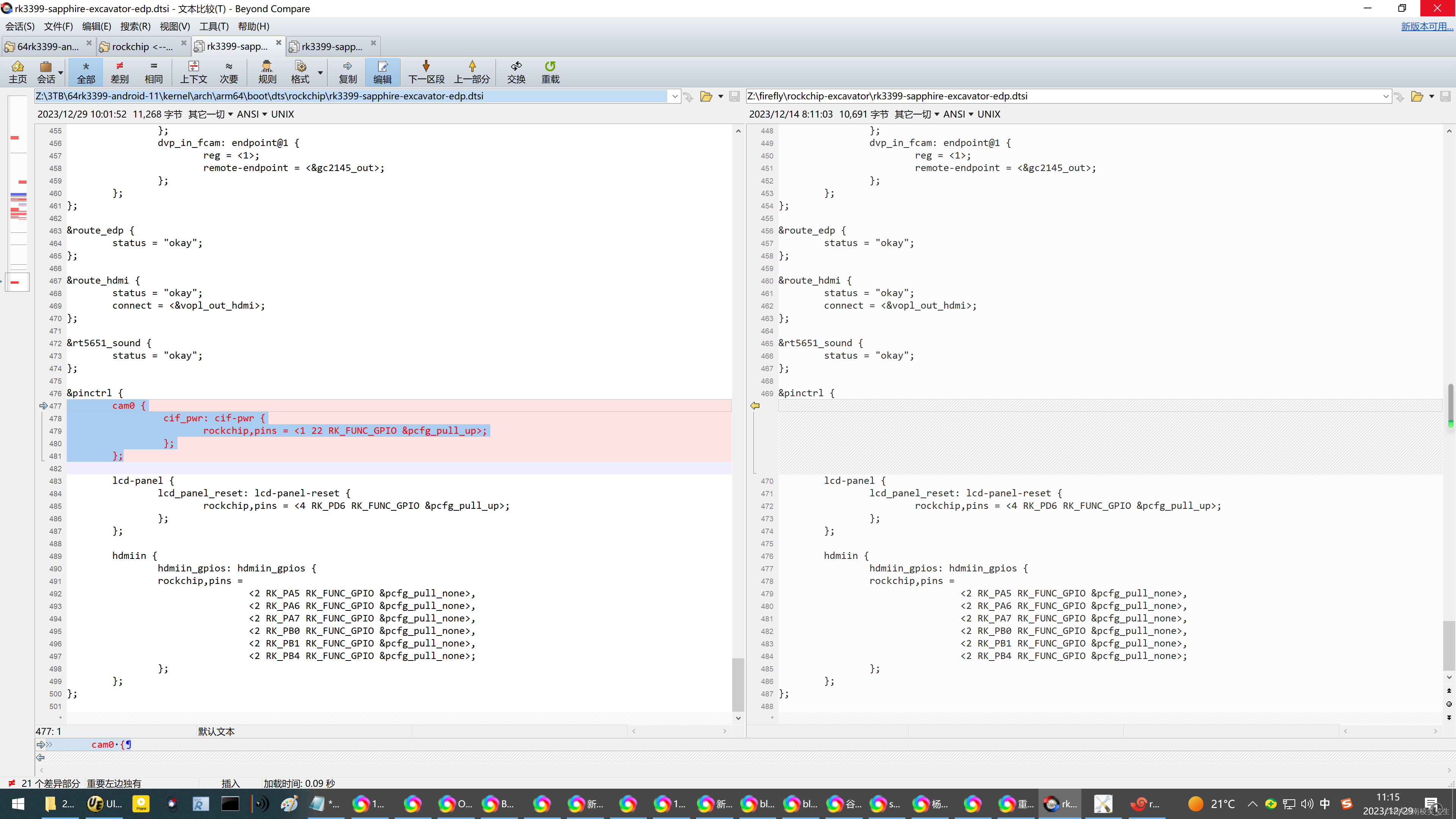
2、挖掘机的DTS修改:
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-sapphire-excavator-edp.dtsi
/*
* Copyright (c) 2018 Fuzhou Rockchip Electronics Co., Ltd
*
* This file is dual-licensed: you can use it either under the terms
* of the GPL or the X11 license, at your option. Note that this dual
* licensing only applies to this file, and not this project as a
* whole.
*
* a) This file is free software; you can redistribute it and/or
* modify it under the terms of the GNU General Public License as
* published by the Free Software Foundation; either version 2 of the
* License, or (at your option) any later version.
*
* This file is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* Or, alternatively,
*
* b) Permission is hereby granted, free of charge, to any person
* obtaining a copy of this software and associated documentation
* files (the "Software"), to deal in the Software without
* restriction, including without limitation the rights to use,
* copy, modify, merge, publish, distribute, sublicense, and/or
* sell copies of the Software, and to permit persons to whom the
* Software is furnished to do so, subject to the following
* conditions:
*
* The above copyright notice and this permission notice shall be
* included in all copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
* EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
* OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND
* NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT
* HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY,
* WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
* FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR
* OTHER DEALINGS IN THE SOFTWARE.
*/
/dts-v1/;
#include "rk3399-excavator-sapphire.dtsi"
#include "rk3399-android.dtsi"
#include "rk3399-vop-clk-set.dtsi"
/ {
vcc_lcd: vcc-lcd {
compatible = "regulator-fixed";
regulator-name = "vcc_lcd";
gpio = <&gpio4 30 GPIO_ACTIVE_HIGH>;
startup-delay-us = <20000>;
enable-active-high;
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
regulator-boot-on;
vin-supply = <&vcc5v0_sys>;
};
panel: panel {
compatible = "simple-panel";
backlight = <&backlight>;
power-supply = <&vcc_lcd>;
enable-gpios = <&gpio1 13 GPIO_ACTIVE_HIGH>;
prepare-delay-ms = <20>;
enable-delay-ms = <20>;
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <200000000>;
hactive = <1536>;
vactive = <2048>;
hfront-porch = <12>;
hsync-len = <16>;
hback-porch = <48>;
vfront-porch = <8>;
vsync-len = <4>;
vback-porch = <8>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
ports {
panel_in: endpoint {
remote-endpoint = <&edp_out>;
};
};
};
test-power {
status = "okay";
};
hdmiin_sound: hdmiin-sound {
compatible = "rockchip,rockchip-rt5651-sound";
rockchip,cpu = <&i2s0>;
rockchip,codec = <&rt5651 &rt5651>;
status = "okay";
};
vcc_mipi: vcc_mipi {
compatible = "regulator-fixed";
enable-active-high;
gpio = <&gpio1 22 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&cif_pwr>;
regulator-name = "vcc_mipi";
};
};
&backlight {
status = "okay";
enable-gpios = <&gpio4 29 GPIO_ACTIVE_HIGH>;
};
&edp {
status = "okay";
force-hpd;
ports {
port@1 {
reg = <1>;
edp_out: endpoint {
remote-endpoint = <&panel_in>;
};
};
};
};
&edp_in_vopl {
status = "disabled";
};
&hdmi_in_vopb {
status = "disabled";
};
&rt5651 {
status = "okay";
};
&cdn_dp {
status = "disabled";
extcon = <&fusb0>;
phys = <&tcphy0_dp>;
};
&hdmi_dp_sound {
status = "okay";
};
&hdmiin_sound {
status = "disabled";
};
&dp_in_vopb {
status = "disabled";
};
&i2s2 {
status = "okay";
};
&i2c1 {
status = "okay";
gsl3673: gsl3673@40 {
compatible = "GSL,GSL3673";
reg = <0x40>;
screen_max_x = <1536>;
screen_max_y = <2048>;
irq_gpio_number = <&gpio1 20 IRQ_TYPE_LEVEL_LOW>;
rst_gpio_number = <&gpio4 22 GPIO_ACTIVE_HIGH>;
};
sgm3784: sgm3784@30 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "sgmicro,gsm3784";
reg = <0x30>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
enable-gpio = <&gpio2 RK_PB4 GPIO_ACTIVE_HIGH>;
strobe-gpio = <&gpio1 RK_PA3 GPIO_ACTIVE_HIGH>;
status = "okay";
sgm3784_led0: led@0 {
reg = <0x0>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
sgm3784_led1: led@1 {
reg = <0x1>;
led-max-microamp = <299200>;
flash-max-microamp = <1122000>;
flash-max-timeout-us = <1600000>;
};
};
tc358749x: tc358749x@0f {
compatible = "toshiba,tc358749x";
reg = <0x0f>;
power-gpios = <&gpio2 6 GPIO_ACTIVE_HIGH>;
power18-gpios = <&gpio2 9 GPIO_ACTIVE_HIGH>;
power33-gpios = <&gpio2 5 GPIO_ACTIVE_HIGH>;
csi-ctl-gpios = <&gpio2 10 GPIO_ACTIVE_HIGH>;
stanby-gpios = <&gpio2 8 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio2 7 GPIO_ACTIVE_HIGH>;
int-gpios = <&gpio2 12 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&hdmiin_gpios>;
status = "disabled";
};
gc2145: gc2145@3c{
status = "okay";
compatible = "galaxycore,gc2145";
reg = <0x3c>;
pinctrl-names = "default";
pinctrl-0 = <&cif_clkout>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
/* avdd-supply = <>; */
/* dvdd-supply = <>; */
/* dovdd-supply = <>; */
pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>; //ok
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CameraKing";
rockchip,camera-module-lens-name = "Largan";
port {
gc2145_out: endpoint {
remote-endpoint = <&dvp_in_fcam>;
};
};
};
vm149c: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13850b: ov13850b@10 {
compatible = "ovti,ov13850";
status = "disabled";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 2 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c>;
port {
ucam_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2>;
};
};
};
vm149c_front: vm149c_front@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
};
ov13850f: ov13850f@10 {
compatible = "ovti,ov13850";
status = "disabled";
reg = <0x10>;
clocks = <&cru SCLK_CIF_OUT>;
clock-names = "xvclk";
//avdd-supply = <&vcc_mipi>; /* VCC28_MIPI */
//dovdd-supply = <&vcc_mipi>; /* VCC18_MIPI */
//dvdd-supply = <&dvdd_1v2>; /* DVDD_1V2 */
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 3 GPIO_ACTIVE_HIGH>;
pinctrl-names = "rockchip,camera_default";
pinctrl-0 = <&cif_clkout>;
firefly,second-enabled-index = <1>;
firefly,clkout-enabled-index = <0>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "CMK-CT0116";
rockchip,camera-module-lens-name = "Largan-50013A1";
lens-focus = <&vm149c_front>;
port {
ucam_out1: endpoint {
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2>;
};
};
};
};
&i2c6 {
cw2015@62 {
status = "disabled";
compatible = "cw201x";
reg = <0x62>;
bat_config_info = <0x15 0x42 0x60 0x59 0x52 0x58 0x4D 0x48
0x48 0x44 0x44 0x46 0x49 0x48 0x32 0x24
0x20 0x17 0x13 0x0F 0x19 0x3E 0x51 0x45
0x08 0x76 0x0B 0x85 0x0E 0x1C 0x2E 0x3E
0x4D 0x52 0x52 0x57 0x3D 0x1B 0x6A 0x2D
0x25 0x43 0x52 0x87 0x8F 0x91 0x94 0x52
0x82 0x8C 0x92 0x96 0xFF 0x7B 0xBB 0xCB
0x2F 0x7D 0x72 0xA5 0xB5 0xC1 0x46 0xAE>;
monitor_sec = <5>;
virtual_power = <0>;
};
};
&isp0_mmu {
status = "okay";
};
&isp1_mmu {
status = "okay";
};
&mipi_dphy_rx0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};
&mipi_dphy_tx1rx1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_tx1rx1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp1_mipi_in>;
};
};
};
};
&vopb {
status = "okay";
assigned-clocks = <&cru DCLK_VOP0_DIV>;
assigned-clock-parents = <&cru PLL_CPLL>;
};
&vopl {
status = "okay";
assigned-clocks = <&cru DCLK_VOP1_DIV>;
assigned-clock-parents = <&cru PLL_VPLL>;
};
&pcie_phy {
status = "okay";
};
&pcie0 {
status = "okay";
};
&rkisp1_0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_mipi_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&dphy_rx0_out>;
};
};
};
&rkisp1_1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp1_mipi_in: endpoint@0 {
reg = <0>;
remote-endpoint = <&dphy_tx1rx1_out>;
};
dvp_in_fcam: endpoint@1 {
reg = <1>;
remote-endpoint = <&gc2145_out>;
};
};
};
&route_edp {
status = "okay";
};
&route_hdmi {
status = "okay";
connect = <&vopl_out_hdmi>;
};
&rt5651_sound {
status = "okay";
};
&pinctrl {
cam0 {
cif_pwr: cif-pwr {
rockchip,pins = <1 22 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
lcd-panel {
lcd_panel_reset: lcd-panel-reset {
rockchip,pins = <4 RK_PD6 RK_FUNC_GPIO &pcfg_pull_up>;
};
};
hdmiin {
hdmiin_gpios: hdmiin_gpios {
rockchip,pins =
<2 RK_PA5 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA6 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB1 RK_FUNC_GPIO &pcfg_pull_none>,
<2 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};



3、
Z:\3TB\64rk3399-android-11\kernel\arch\arm64\boot\dts\rockchip\rk3399-sapphire-excavator-edp-avb.dts
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2018 Fuzhou Rockchip Electronics Co., Ltd
*/
/dts-v1/;
#include "rk3399-sapphire-excavator-edp.dtsi"
/ {
model = "Rockchip RK3399 Excavator Board edp avb (Android)";
compatible = "rockchip,android", "rockchip,rk3399-excavator-edp-avb", "rockchip,rk3399";
chosen: chosen {
bootargs = "earlycon=uart8250,mmio32,0xff1a0000 console=ttyFIQ0 androidboot.baseband=N/A androidboot.veritymode=enforcing androidboot.hardware=rk30board androidboot.console=ttyFIQ0 init=/init initrd=0x62000001,0x00800000 coherent_pool=1m";
};
ext_cam_clk: external-camera-clock {
compatible = "fixed-clock";
clock-frequency = <27000000>;
clock-output-names = "CLK_CAMERA_27MHZ";
#clock-cells = <0>;
};
};
&i2c1 {
status = "okay";
/delete-node/ tc358749x@0f;
tc35874x: tc35874x@0f {
status = "disabled";
reg = <0x0f>;
compatible = "toshiba,tc358749";
clocks = <&ext_cam_clk>;
clock-names = "refclk";
reset-gpios = <&gpio2 7 GPIO_ACTIVE_LOW>;
/* interrupt-parent = <&gpio2>; */
/* interrupts = <12 IRQ_TYPE_LEVEL_HIGH>; */
pinctrl-names = "default";
pinctrl-0 = <&tc35874x_gpios>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "TC358749XBG";
rockchip,camera-module-lens-name = "NC";
port {
hdmiin_out0: endpoint {
remote-endpoint = <&hdmi_to_mipi_in>;
data-lanes = <1 2 3 4>;
clock-noncontinuous;
link-frequencies =
/bits/ 64 <297000000>;
};
};
};
ov13850b: ov13850b@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 1 GPIO_ACTIVE_HIGH>;
};
ov13850f: ov13850f@10 {
status = "okay";
avdd-supply = <&vcc_mipi>;
power-gpios = <&gpio1 23 GPIO_ACTIVE_HIGH>;
reset-gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
pwdn-gpios = <&gpio2 28 GPIO_ACTIVE_HIGH>;
};
};
&mipi_dphy_rx0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out0>;
data-lanes = <1 2>;
};
hdmi_to_mipi_in: endpoint@2 {
reg = <2>;
remote-endpoint = <&hdmiin_out0>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_rx0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp0_mipi_in>;
};
};
};
};
&mipi_dphy_tx1rx1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ucam_out1>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
dphy_tx1rx1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&isp1_mipi_in>;
};
};
};
};
&pinctrl {
hdmiin {
tc35874x_gpios: tc35874x_gpios {
rockchip,pins =
/* PWREN_3.3 */
<2 RK_PA5 RK_FUNC_GPIO &pcfg_output_high>,
/* PWREN_1.2 */
<2 RK_PA6 RK_FUNC_GPIO &pcfg_output_high>,
/* HDMIIN_RST */
<2 RK_PA7 RK_FUNC_GPIO &pcfg_pull_none>,
/* HDMIIN_STBY */
<2 RK_PB0 RK_FUNC_GPIO &pcfg_output_high>,
/* MIPI_RST */
<2 RK_PB1 RK_FUNC_GPIO &pcfg_output_high>,
/* CSI_CTL */
<2 RK_PB2 RK_FUNC_GPIO &pcfg_output_low>,
/* HDMIIN_INT */
<2 RK_PB4 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
&rkisp1_0 {
status = "okay";
};
&rkisp1_1 {
status = "okay";
};


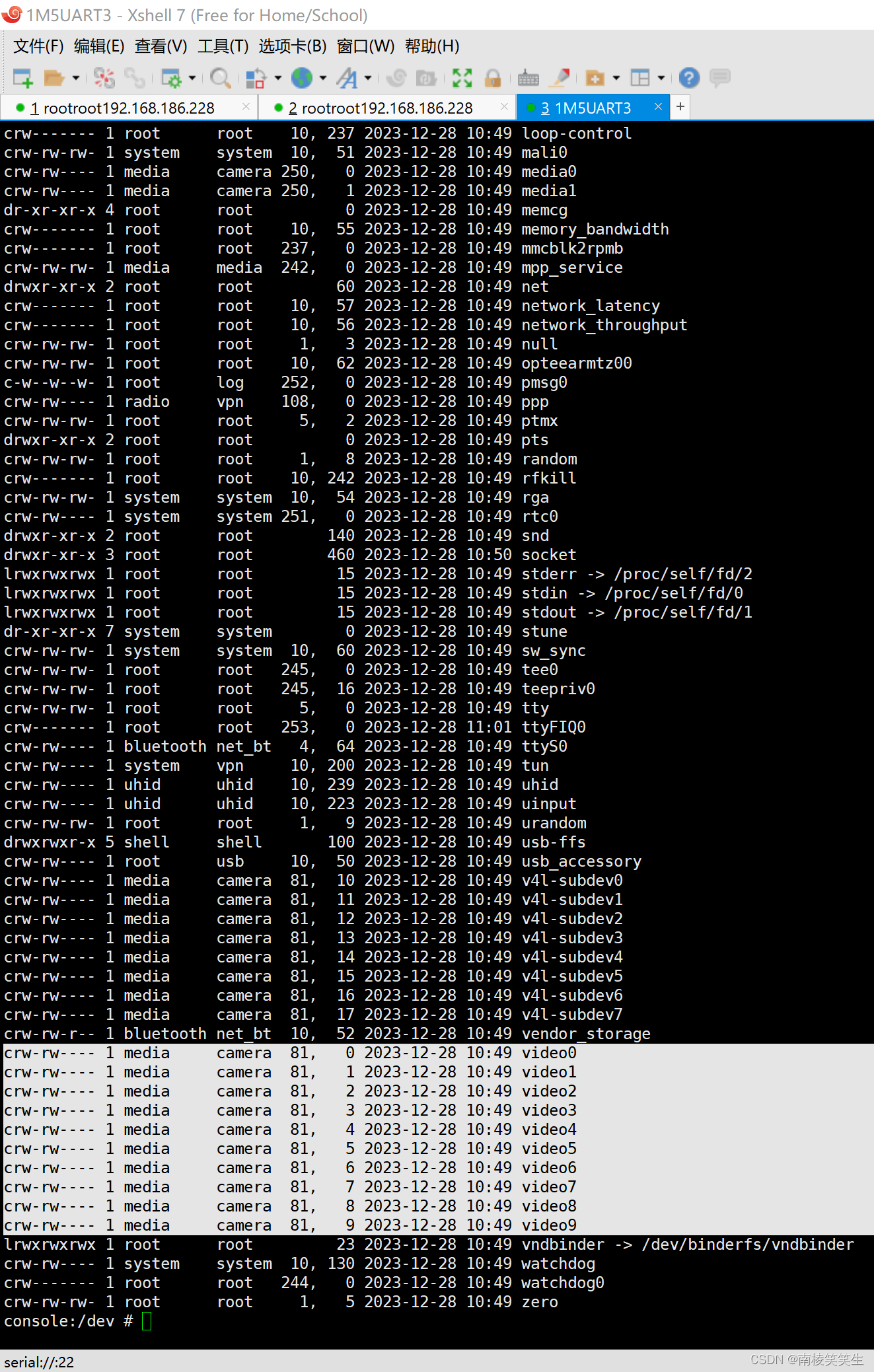
这里【必须】配置mipi_dphy_tx1rx1,如果不配置,出不来/dev/video9,也就是你没有前置摄像头了!

4、摄像头ov13850前后兼容的魔改!
Z:\3TB\64rk3399-android-11\kernel\drivers\media\i2c\ov13850.c
// SPDX-License-Identifier: GPL-2.0
/*
* ov13850 driver
*
* Copyright (C) 2017 Fuzhou Rockchip Electronics Co., Ltd.
*
* V0.0X01.0X01 add poweron function.
* V0.0X01.0X02 fix mclk issue when probe multiple camera.
* V0.0X01.0X03 add enum_frame_interval function.
* V0.0X01.0X04 add quick stream on/off
* V0.0X01.0X05 add function g_mbus_config
*/
#include <linux/clk.h>
#include <linux/device.h>
#include <linux/delay.h>
#include <linux/gpio/consumer.h>
#include <linux/i2c.h>
#include <linux/module.h>
#include <linux/pm_runtime.h>
#include <linux/regulator/consumer.h>
#include <linux/sysfs.h>
#include <linux/slab.h>
#include <linux/version.h>
#include <linux/rk-camera-module.h>
#include <media/media-entity.h>
#include <media/v4l2-async.h>
#include <media/v4l2-ctrls.h>
#include <media/v4l2-subdev.h>
#include <linux/pinctrl/consumer.h>
#include <linux/of_gpio.h>
#define DRIVER_VERSION KERNEL_VERSION(0, 0x01, 0x05)
#ifndef V4L2_CID_DIGITAL_GAIN
#define V4L2_CID_DIGITAL_GAIN V4L2_CID_GAIN
#endif
#define OV13850_LINK_FREQ_300MHZ 300000000
/* pixel rate = link frequency * 2 * lanes / BITS_PER_SAMPLE */
#define OV13850_PIXEL_RATE (OV13850_LINK_FREQ_300MHZ * 2 * 2 / 10)
#define OV13850_XVCLK_FREQ 24000000
#define CHIP_ID 0x00d850
#define OV13850_REG_CHIP_ID 0x300a
#define OV13850_REG_CTRL_MODE 0x0100
#define OV13850_MODE_SW_STANDBY 0x0
#define OV13850_MODE_STREAMING BIT(0)
#define OV13850_REG_EXPOSURE 0x3500
#define OV13850_EXPOSURE_MIN 4
#define OV13850_EXPOSURE_STEP 1
#define OV13850_VTS_MAX 0x7fff
#define OV13850_REG_GAIN_H 0x350a
#define OV13850_REG_GAIN_L 0x350b
#define OV13850_GAIN_H_MASK 0x07
#define OV13850_GAIN_H_SHIFT 8
#define OV13850_GAIN_L_MASK 0xff
#define OV13850_GAIN_MIN 0x10
#define OV13850_GAIN_MAX 0xf8
#define OV13850_GAIN_STEP 1
#define OV13850_GAIN_DEFAULT 0x10
#define OV13850_REG_TEST_PATTERN 0x5e00
#define OV13850_TEST_PATTERN_ENABLE 0x80
#define OV13850_TEST_PATTERN_DISABLE 0x0
#define OV13850_REG_VTS 0x380e
#define REG_NULL 0xFFFF
#define OV13850_REG_VALUE_08BIT 1
#define OV13850_REG_VALUE_16BIT 2
#define OV13850_REG_VALUE_24BIT 3
#define OV13850_LANES 2
#define OV13850_BITS_PER_SAMPLE 10
#define OV13850_CHIP_REVISION_REG 0x302A
#define OV13850_R1A 0xb1
#define OV13850_R2A 0xb2
#define OF_CAMERA_PINCTRL_STATE_DEFAULT "rockchip,camera_default"
#define OF_CAMERA_PINCTRL_STATE_SLEEP "rockchip,camera_sleep"
#define OV13850_I2C_ADDR0 0x10
#define OV13850_I2C_ADDR1 0x36
#define OV13850_NAME "ov13850"
static const struct regval *ov13850_global_regs;
static u32 clkout_enabled_index;
static const char * const ov13850_supply_names[] = {
"avdd", /* Analog power */
"dovdd", /* Digital I/O power */
"dvdd", /* Digital core power */
};
#define OV13850_NUM_SUPPLIES ARRAY_SIZE(ov13850_supply_names)
struct regval {
u16 addr;
u8 val;
};
struct ov13850_mode {
u32 width;
u32 height;
struct v4l2_fract max_fps;
u32 hts_def;
u32 vts_def;
u32 exp_def;
const struct regval *reg_list;
};
struct ov13850 {
struct i2c_client *client;
struct clk *xvclk;
struct gpio_desc *power_gpio;
struct gpio_desc *reset_gpio;
struct gpio_desc *pwdn_gpio;
struct regulator_bulk_data supplies[OV13850_NUM_SUPPLIES];
struct pinctrl *pinctrl;
struct pinctrl_state *pins_default;
struct pinctrl_state *pins_sleep;
struct v4l2_subdev subdev;
struct media_pad pad;
struct v4l2_ctrl_handler ctrl_handler;
struct v4l2_ctrl *exposure;
struct v4l2_ctrl *anal_gain;
struct v4l2_ctrl *digi_gain;
struct v4l2_ctrl *hblank;
struct v4l2_ctrl *vblank;
struct v4l2_ctrl *test_pattern;
struct mutex mutex;
bool streaming;
bool power_on;
const struct ov13850_mode *cur_mode;
u32 module_index;
const char *module_facing;
const char *module_name;
const char *len_name;
};
#define to_ov13850(sd) container_of(sd, struct ov13850, subdev)
/*
* Xclk 24Mhz
*/
static const struct regval ov13850_global_regs_r1a[] = {
{0x0103, 0x01},
{0x0300, 0x00},
{0x0301, 0x00},
{0x0302, 0x32},
{0x0303, 0x01},
{0x030a, 0x00},
{0x300f, 0x11},
{0x3010, 0x01},
{0x3011, 0x76},
{0x3012, 0x21},
{0x3013, 0x12},
{0x3014, 0x11},
{0x3015, 0xc0},
{0x301f, 0x03},
{0x3106, 0x00},
{0x3210, 0x47},
{0x3500, 0x00},
{0x3501, 0x60},
{0x3502, 0x00},
{0x3506, 0x00},
{0x3507, 0x02},
{0x3508, 0x00},
{0x350a, 0x00},
{0x350b, 0x80},
{0x350e, 0x00},
{0x350f, 0x10},
{0x3600, 0x40},
{0x3601, 0xfc},
{0x3602, 0x02},
{0x3603, 0x48},
{0x3604, 0xa5},
{0x3605, 0x9f},
{0x3607, 0x00},
{0x360a, 0x40},
{0x360b, 0x91},
{0x360c, 0x49},
{0x360f, 0x8a},
{0x3611, 0x10},
{0x3612, 0x27},
{0x3613, 0x33},
{0x3615, 0x08},
{0x3641, 0x02},
{0x3660, 0x82},
{0x3668, 0x54},
{0x3669, 0x40},
{0x3667, 0xa0},
{0x3702, 0x40},
{0x3703, 0x44},
{0x3704, 0x2c},
{0x3705, 0x24},
{0x3706, 0x50},
{0x3707, 0x44},
{0x3708, 0x3c},
{0x3709, 0x1f},
{0x370a, 0x26},
{0x370b, 0x3c},
{0x3720, 0x66},
{0x3722, 0x84},
{0x3728, 0x40},
{0x372a, 0x00},
{0x372f, 0x90},
{0x3710, 0x28},
{0x3716, 0x03},
{0x3718, 0x10},
{0x3719, 0x08},
{0x371c, 0xfc},
{0x3760, 0x13},
{0x3761, 0x34},
{0x3767, 0x24},
{0x3768, 0x06},
{0x3769, 0x45},
{0x376c, 0x23},
{0x3d84, 0x00},
{0x3d85, 0x17},
{0x3d8c, 0x73},
{0x3d8d, 0xbf},
{0x3800, 0x00},
{0x3801, 0x08},
{0x3802, 0x00},
{0x3803, 0x04},
{0x3804, 0x10},
{0x3805, 0x97},
{0x3806, 0x0c},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3810, 0x00},
{0x3811, 0x04},
{0x3812, 0x00},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x05},
{0x3834, 0x00},
{0x3835, 0x1c},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4000, 0xf1},
{0x4001, 0x00},
{0x400b, 0x0c},
{0x4011, 0x00},
{0x401a, 0x00},
{0x401b, 0x00},
{0x401c, 0x00},
{0x401d, 0x00},
{0x4020, 0x00},
{0x4021, 0xE4},
{0x4022, 0x07},
{0x4023, 0x5F},
{0x4024, 0x08},
{0x4025, 0x44},
{0x4026, 0x08},
{0x4027, 0x47},
{0x4028, 0x00},
{0x4029, 0x02},
{0x402a, 0x04},
{0x402b, 0x08},
{0x402c, 0x02},
{0x402d, 0x02},
{0x402e, 0x0c},
{0x402f, 0x08},
{0x403d, 0x2c},
{0x403f, 0x7f},
{0x4500, 0x82},
{0x4501, 0x38},
{0x4601, 0x04},
{0x4602, 0x22},
{0x4603, 0x01},
{0x4800, 0x24}, //MIPI CLK control
{0x4837, 0x1b},
{0x4d00, 0x04},
{0x4d01, 0x42},
{0x4d02, 0xd1},
{0x4d03, 0x90},
{0x4d04, 0x66},
{0x4d05, 0x65},
{0x5000, 0x0e},
{0x5001, 0x01},
{0x5002, 0x07},
{0x5013, 0x40},
{0x501c, 0x00},
{0x501d, 0x10},
{0x5242, 0x00},
{0x5243, 0xb8},
{0x5244, 0x00},
{0x5245, 0xf9},
{0x5246, 0x00},
{0x5247, 0xf6},
{0x5248, 0x00},
{0x5249, 0xa6},
{0x5300, 0xfc},
{0x5301, 0xdf},
{0x5302, 0x3f},
{0x5303, 0x08},
{0x5304, 0x0c},
{0x5305, 0x10},
{0x5306, 0x20},
{0x5307, 0x40},
{0x5308, 0x08},
{0x5309, 0x08},
{0x530a, 0x02},
{0x530b, 0x01},
{0x530c, 0x01},
{0x530d, 0x0c},
{0x530e, 0x02},
{0x530f, 0x01},
{0x5310, 0x01},
{0x5400, 0x00},
{0x5401, 0x61},
{0x5402, 0x00},
{0x5403, 0x00},
{0x5404, 0x00},
{0x5405, 0x40},
{0x540c, 0x05},
{0x5b00, 0x00},
{0x5b01, 0x00},
{0x5b02, 0x01},
{0x5b03, 0xff},
{0x5b04, 0x02},
{0x5b05, 0x6c},
{0x5b09, 0x02},
{0x5e00, 0x00},
{0x5e10, 0x1c},
{0x0102, 0x01}, //Fast standby enable
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
*/
static const struct regval ov13850_global_regs_r2a[] = {
{0x0300, 0x01},
{0x0301, 0x00},
{0x0302, 0x28},
{0x0303, 0x00},
{0x030a, 0x00},
{0x300f, 0x11},
{0x3010, 0x01},
{0x3011, 0x76},
{0x3012, 0x21},
{0x3013, 0x12},
{0x3014, 0x11},
{0x301f, 0x03},
{0x3106, 0x00},
{0x3210, 0x47},
{0x3500, 0x00},
{0x3501, 0x60},
{0x3502, 0x00},
{0x3506, 0x00},
{0x3507, 0x02},
{0x3508, 0x00},
{0x350a, 0x00},
{0x350b, 0x80},
{0x350e, 0x00},
{0x350f, 0x10},
{0x351a, 0x00},
{0x351b, 0x10},
{0x351c, 0x00},
{0x351d, 0x20},
{0x351e, 0x00},
{0x351f, 0x40},
{0x3520, 0x00},
{0x3521, 0x80},
{0x3600, 0xc0},
{0x3601, 0xfc},
{0x3602, 0x02},
{0x3603, 0x78},
{0x3604, 0xb1},
{0x3605, 0xb5},
{0x3606, 0x73},
{0x3607, 0x07},
{0x3609, 0x40},
{0x360a, 0x30},
{0x360b, 0x91},
{0x360c, 0x09},
{0x360f, 0x02},
{0x3611, 0x10},
{0x3612, 0x27},
{0x3613, 0x33},
{0x3615, 0x0c},
{0x3616, 0x0e},
{0x3641, 0x02},
{0x3660, 0x82},
{0x3668, 0x54},
{0x3669, 0x00},
{0x366a, 0x3f},
{0x3667, 0xa0},
{0x3702, 0x40},
{0x3703, 0x44},
{0x3704, 0x2c},
{0x3705, 0x01},
{0x3706, 0x15},
{0x3707, 0x44},
{0x3708, 0x3c},
{0x3709, 0x1f},
{0x370a, 0x27},
{0x370b, 0x3c},
{0x3720, 0x55},
{0x3722, 0x84},
{0x3728, 0x40},
{0x372a, 0x00},
{0x372b, 0x02},
{0x372e, 0x22},
{0x372f, 0x90},
{0x3730, 0x00},
{0x3731, 0x00},
{0x3732, 0x00},
{0x3733, 0x00},
{0x3710, 0x28},
{0x3716, 0x03},
{0x3718, 0x10},
{0x3719, 0x0c},
{0x371a, 0x08},
{0x371c, 0xfc},
{0x3748, 0x00},
{0x3760, 0x13},
{0x3761, 0x33},
{0x3762, 0x86},
{0x3763, 0x16},
{0x3767, 0x24},
{0x3768, 0x06},
{0x3769, 0x45},
{0x376c, 0x23},
{0x376f, 0x80},
{0x3773, 0x06},
{0x3d84, 0x00},
{0x3d85, 0x17},
{0x3d8c, 0x73},
{0x3d8d, 0xbf},
{0x3800, 0x00},
{0x3801, 0x08},
{0x3802, 0x00},
{0x3803, 0x04},
{0x3804, 0x10},
{0x3805, 0x97},
{0x3806, 0x0c},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3810, 0x00},
{0x3811, 0x04},
{0x3812, 0x00},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x06},
{0x3823, 0x00},
{0x3826, 0x00},
{0x3827, 0x02},
{0x3834, 0x00},
{0x3835, 0x1c},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4000, 0xf1},
{0x4001, 0x00},
{0x4006, 0x04},
{0x4007, 0x04},
{0x400b, 0x0c},
{0x4011, 0x00},
{0x401a, 0x00},
{0x401b, 0x00},
{0x401c, 0x00},
{0x401d, 0x00},
{0x4020, 0x00},
{0x4021, 0xe4},
{0x4022, 0x04},
{0x4023, 0xd7},
{0x4024, 0x05},
{0x4025, 0xbc},
{0x4026, 0x05},
{0x4027, 0xbf},
{0x4028, 0x00},
{0x4029, 0x02},
{0x402a, 0x04},
{0x402b, 0x08},
{0x402c, 0x02},
{0x402d, 0x02},
{0x402e, 0x0c},
{0x402f, 0x08},
{0x403d, 0x2c},
{0x403f, 0x7f},
{0x4041, 0x07},
{0x4500, 0x82},
{0x4501, 0x3c},
{0x458b, 0x00},
{0x459c, 0x00},
{0x459d, 0x00},
{0x459e, 0x00},
{0x4601, 0x83},
{0x4602, 0x22},
{0x4603, 0x01},
{0x4800, 0x24}, //MIPI CLK control
{0x4837, 0x19},
{0x4d00, 0x04},
{0x4d01, 0x42},
{0x4d02, 0xd1},
{0x4d03, 0x90},
{0x4d04, 0x66},
{0x4d05, 0x65},
{0x4d0b, 0x00},
{0x5000, 0x0e},
{0x5001, 0x01},
{0x5002, 0x07},
{0x5013, 0x40},
{0x501c, 0x00},
{0x501d, 0x10},
{0x510f, 0xfc},
{0x5110, 0xf0},
{0x5111, 0x10},
{0x536d, 0x02},
{0x536e, 0x67},
{0x536f, 0x01},
{0x5370, 0x4c},
{0x5400, 0x00},
{0x5400, 0x00},
{0x5401, 0x61},
{0x5402, 0x00},
{0x5403, 0x00},
{0x5404, 0x00},
{0x5405, 0x40},
{0x540c, 0x05},
{0x5501, 0x00},
{0x5b00, 0x00},
{0x5b01, 0x00},
{0x5b02, 0x01},
{0x5b03, 0xff},
{0x5b04, 0x02},
{0x5b05, 0x6c},
{0x5b09, 0x02},
{0x5e00, 0x00},
{0x5e10, 0x1c},
{0x0102, 0x01}, //Fast standby enable
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
* max_framerate 30fps
* mipi_datarate per lane 600Mbps
*/
static const struct regval ov13850_2112x1568_regs[] = {
{0x3612, 0x27},
{0x370a, 0x26},
{0x372a, 0x00},
{0x372f, 0x90},
{0x3801, 0x08},
{0x3805, 0x97},
{0x3807, 0x4b},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x12},
{0x380d, 0xc0},
{0x380e, 0x06},
{0x380f, 0x80},
{0x3813, 0x02},
{0x3814, 0x31},
{0x3815, 0x31},
{0x3820, 0x02},
{0x3821, 0x05},
{0x3836, 0x08},
{0x3837, 0x02},
{0x4601, 0x04},
{0x4603, 0x00},
{0x4020, 0x00},
{0x4021, 0xE4},
{0x4022, 0x07},
{0x4023, 0x5F},
{0x4024, 0x08},
{0x4025, 0x44},
{0x4026, 0x08},
{0x4027, 0x47},
{0x4603, 0x01},
{0x5401, 0x61},
{0x5405, 0x40},
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
* max_framerate 7fps
* mipi_datarate per lane 600Mbps
*/
static const struct regval ov13850_4224x3136_regs[] = {
{0x3612, 0x2f},
{0x370a, 0x24},
{0x372a, 0x04},
{0x372f, 0xa0},
{0x3801, 0x0C},
{0x3805, 0x93},
{0x3807, 0x4B},
{0x3808, 0x10},
{0x3809, 0x80},
{0x380a, 0x0c},
{0x380b, 0x40},
{0x380e, 0x0d},
{0x380f, 0x00},
{0x3813, 0x04},
{0x3814, 0x11},
{0x3815, 0x11},
{0x3820, 0x00},
{0x3821, 0x04},
{0x3836, 0x04},
{0x3837, 0x01},
{0x4601, 0x87},
{0x4603, 0x01},
{0x4020, 0x02},
{0x4021, 0x4C},
{0x4022, 0x0E},
{0x4023, 0x37},
{0x4024, 0x0F},
{0x4025, 0x1C},
{0x4026, 0x0F},
{0x4027, 0x1F},
{0x4603, 0x00},
{0x5401, 0x71},
{0x5405, 0x80},
{REG_NULL, 0x00},
};
static const struct ov13850_mode supported_modes[] = {
{
.width = 2112,
.height = 1568,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0680,
.reg_list = ov13850_2112x1568_regs,
},{
.width = 4224,
.height = 3136,
.max_fps = {
.numerator = 20000,
.denominator = 150000,
},
.exp_def = 0x0600,
.hts_def = 0x12c0,
.vts_def = 0x0d00,
.reg_list = ov13850_4224x3136_regs,
},
};
static const s64 link_freq_menu_items[] = {
OV13850_LINK_FREQ_300MHZ
};
static const char * const ov13850_test_pattern_menu[] = {
"Disabled",
"Vertical Color Bar Type 1",
"Vertical Color Bar Type 2",
"Vertical Color Bar Type 3",
"Vertical Color Bar Type 4"
};
/* Write registers up to 4 at a time */
static int ov13850_write_reg(struct i2c_client *client, u16 reg,
u32 len, u32 val)
{
u32 buf_i, val_i;
u8 buf[6];
u8 *val_p;
__be32 val_be;
dev_dbg(&client->dev, "write reg(0x%x val:0x%x)!\n", reg, val);
if (len > 4)
return -EINVAL;
buf[0] = reg >> 8;
buf[1] = reg & 0xff;
val_be = cpu_to_be32(val);
val_p = (u8 *)&val_be;
buf_i = 2;
val_i = 4 - len;
while (val_i < 4)
buf[buf_i++] = val_p[val_i++];
if (i2c_master_send(client, buf, len + 2) != len + 2)
return -EIO;
return 0;
}
static int ov13850_write_array(struct i2c_client *client,
const struct regval *regs)
{
u32 i;
int ret = 0;
for (i = 0; ret == 0 && regs[i].addr != REG_NULL; i++)
ret = ov13850_write_reg(client, regs[i].addr,
OV13850_REG_VALUE_08BIT,
regs[i].val);
return ret;
}
/* Read registers up to 4 at a time */
static int ov13850_read_reg(struct i2c_client *client, u16 reg,
unsigned int len, u32 *val)
{
struct i2c_msg msgs[2];
u8 *data_be_p;
__be32 data_be = 0;
__be16 reg_addr_be = cpu_to_be16(reg);
int ret;
if (len > 4 || !len)
return -EINVAL;
data_be_p = (u8 *)&data_be;
/* Write register address */
msgs[0].addr = client->addr;
msgs[0].flags = 0;
msgs[0].len = 2;
msgs[0].buf = (u8 *)®_addr_be;
/* Read data from register */
msgs[1].addr = client->addr;
msgs[1].flags = I2C_M_RD;
msgs[1].len = len;
msgs[1].buf = &data_be_p[4 - len];
ret = i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));
if (ret != ARRAY_SIZE(msgs))
return -EIO;
*val = be32_to_cpu(data_be);
return 0;
}
static int ov13850_get_reso_dist(const struct ov13850_mode *mode,
struct v4l2_mbus_framefmt *framefmt)
{
return abs(mode->width - framefmt->width) +
abs(mode->height - framefmt->height);
}
static const struct ov13850_mode *
ov13850_find_best_fit(struct v4l2_subdev_format *fmt)
{
struct v4l2_mbus_framefmt *framefmt = &fmt->format;
int dist;
int cur_best_fit = 0;
int cur_best_fit_dist = -1;
unsigned int i;
for (i = 0; i < ARRAY_SIZE(supported_modes); i++) {
dist = ov13850_get_reso_dist(&supported_modes[i], framefmt);
if (cur_best_fit_dist == -1 || dist < cur_best_fit_dist) {
cur_best_fit_dist = dist;
cur_best_fit = i;
}
}
return &supported_modes[cur_best_fit];
}
static int ov13850_set_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode;
s64 h_blank, vblank_def;
mutex_lock(&ov13850->mutex);
mode = ov13850_find_best_fit(fmt);
fmt->format.code = MEDIA_BUS_FMT_SBGGR10_1X10;
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.field = V4L2_FIELD_NONE;
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
*v4l2_subdev_get_try_format(sd, cfg, fmt->pad) = fmt->format;
#else
mutex_unlock(&ov13850->mutex);
return -ENOTTY;
#endif
} else {
ov13850->cur_mode = mode;
h_blank = mode->hts_def - mode->width;
__v4l2_ctrl_modify_range(ov13850->hblank, h_blank,
h_blank, 1, h_blank);
vblank_def = mode->vts_def - mode->height;
__v4l2_ctrl_modify_range(ov13850->vblank, vblank_def,
OV13850_VTS_MAX - mode->height,
1, vblank_def);
}
mutex_unlock(&ov13850->mutex);
return 0;
}
static int ov13850_get_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode = ov13850->cur_mode;
mutex_lock(&ov13850->mutex);
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
fmt->format = *v4l2_subdev_get_try_format(sd, cfg, fmt->pad);
#else
mutex_unlock(&ov13850->mutex);
return -ENOTTY;
#endif
} else {
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.code = MEDIA_BUS_FMT_SBGGR10_1X10;
fmt->format.field = V4L2_FIELD_NONE;
}
mutex_unlock(&ov13850->mutex);
return 0;
}
static int ov13850_enum_mbus_code(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_mbus_code_enum *code)
{
if (code->index != 0)
return -EINVAL;
code->code = MEDIA_BUS_FMT_SBGGR10_1X10;
return 0;
}
static int ov13850_enum_frame_sizes(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_size_enum *fse)
{
if (fse->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fse->code != MEDIA_BUS_FMT_SBGGR10_1X10)
return -EINVAL;
fse->min_width = supported_modes[fse->index].width;
fse->max_width = supported_modes[fse->index].width;
fse->max_height = supported_modes[fse->index].height;
fse->min_height = supported_modes[fse->index].height;
return 0;
}
static int ov13850_enable_test_pattern(struct ov13850 *ov13850, u32 pattern)
{
u32 val;
if (pattern)
val = (pattern - 1) | OV13850_TEST_PATTERN_ENABLE;
else
val = OV13850_TEST_PATTERN_DISABLE;
return ov13850_write_reg(ov13850->client,
OV13850_REG_TEST_PATTERN,
OV13850_REG_VALUE_08BIT,
val);
}
static int ov13850_g_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_frame_interval *fi)
{
struct ov13850 *ov13850 = to_ov13850(sd);
const struct ov13850_mode *mode = ov13850->cur_mode;
mutex_lock(&ov13850->mutex);
fi->interval = mode->max_fps;
mutex_unlock(&ov13850->mutex);
return 0;
}
static void ov13850_get_module_inf(struct ov13850 *ov13850,
struct rkmodule_inf *inf)
{
memset(inf, 0, sizeof(*inf));
strlcpy(inf->base.sensor, OV13850_NAME, sizeof(inf->base.sensor));
strlcpy(inf->base.module, ov13850->module_name,
sizeof(inf->base.module));
strlcpy(inf->base.lens, ov13850->len_name, sizeof(inf->base.lens));
}
static long ov13850_ioctl(struct v4l2_subdev *sd, unsigned int cmd, void *arg)
{
struct ov13850 *ov13850 = to_ov13850(sd);
long ret = 0;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
ov13850_get_module_inf(ov13850, (struct rkmodule_inf *)arg);
break;
case RKMODULE_SET_QUICK_STREAM:
stream = *((u32 *)arg);
if (stream)
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_STREAMING);
else
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_SW_STANDBY);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#ifdef CONFIG_COMPAT
static long ov13850_compat_ioctl32(struct v4l2_subdev *sd,
unsigned int cmd, unsigned long arg)
{
void __user *up = compat_ptr(arg);
struct rkmodule_inf *inf;
struct rkmodule_awb_cfg *cfg;
long ret;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
inf = kzalloc(sizeof(*inf), GFP_KERNEL);
if (!inf) {
ret = -ENOMEM;
return ret;
}
ret = ov13850_ioctl(sd, cmd, inf);
if (!ret)
ret = copy_to_user(up, inf, sizeof(*inf));
kfree(inf);
break;
case RKMODULE_AWB_CFG:
cfg = kzalloc(sizeof(*cfg), GFP_KERNEL);
if (!cfg) {
ret = -ENOMEM;
return ret;
}
ret = copy_from_user(cfg, up, sizeof(*cfg));
if (!ret)
ret = ov13850_ioctl(sd, cmd, cfg);
kfree(cfg);
break;
case RKMODULE_SET_QUICK_STREAM:
ret = copy_from_user(&stream, up, sizeof(u32));
if (!ret)
ret = ov13850_ioctl(sd, cmd, &stream);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#endif
static int __ov13850_start_stream(struct ov13850 *ov13850)
{
int ret;
ret = ov13850_write_array(ov13850->client, ov13850->cur_mode->reg_list);
if (ret)
return ret;
/* In case these controls are set before streaming */
mutex_unlock(&ov13850->mutex);
ret = v4l2_ctrl_handler_setup(&ov13850->ctrl_handler);
mutex_lock(&ov13850->mutex);
if (ret)
return ret;
return ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_STREAMING);
}
static int __ov13850_stop_stream(struct ov13850 *ov13850)
{
return ov13850_write_reg(ov13850->client,
OV13850_REG_CTRL_MODE,
OV13850_REG_VALUE_08BIT,
OV13850_MODE_SW_STANDBY);
}
static int ov13850_s_stream(struct v4l2_subdev *sd, int on)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct i2c_client *client = ov13850->client;
int ret = 0;
mutex_lock(&ov13850->mutex);
on = !!on;
if (on == ov13850->streaming)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ret = __ov13850_start_stream(ov13850);
if (ret) {
v4l2_err(sd, "start stream failed while write regs\n");
pm_runtime_put(&client->dev);
goto unlock_and_return;
}
} else {
__ov13850_stop_stream(ov13850);
pm_runtime_put(&client->dev);
}
ov13850->streaming = on;
unlock_and_return:
mutex_unlock(&ov13850->mutex);
return ret;
}
static int __ov13850_power_on(struct ov13850 *ov13850);
static void __ov13850_power_off(struct ov13850 *ov13850);
static int ov13850_s_power(struct v4l2_subdev *sd, int on)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct i2c_client *client = ov13850->client;
int ret = 0;
mutex_lock(&ov13850->mutex);
/* If the power state is not modified - no work to do. */
if (ov13850->power_on == !!on)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
__ov13850_power_on(ov13850);
ret = ov13850_write_array(ov13850->client, ov13850_global_regs);
if (ret) {
v4l2_err(sd, "could not set init registers\n");
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ov13850->power_on = true;
/* export gpio */
if (!IS_ERR(ov13850->reset_gpio))
gpiod_export(ov13850->reset_gpio, false);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_export(ov13850->pwdn_gpio, false);
} else {
pm_runtime_put(&client->dev);
__ov13850_power_off(ov13850);
ov13850->power_on = false;
/* unexport gpio */
if (!IS_ERR(ov13850->reset_gpio))
gpiod_unexport(ov13850->reset_gpio);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_unexport(ov13850->pwdn_gpio);
}
unlock_and_return:
mutex_unlock(&ov13850->mutex);
return ret;
}
/* Calculate the delay in us by clock rate and clock cycles */
static inline u32 ov13850_cal_delay(u32 cycles)
{
return DIV_ROUND_UP(cycles, OV13850_XVCLK_FREQ / 1000 / 1000);
}
static int __ov13850_power_on(struct ov13850 *ov13850)
{
int ret;
u32 delay_us;
struct device *dev = &ov13850->client->dev;
if (!IS_ERR_OR_NULL(ov13850->pins_default)) {
ret = pinctrl_select_state(ov13850->pinctrl,
ov13850->pins_default);
if (ret < 0)
dev_err(dev, "could not set pins\n");
}
if (clkout_enabled_index){
ret = clk_set_rate(ov13850->xvclk, OV13850_XVCLK_FREQ);
if (ret < 0)
dev_warn(dev, "Failed to set xvclk rate (24MHz)\n");
if (clk_get_rate(ov13850->xvclk) != OV13850_XVCLK_FREQ)
dev_warn(dev, "xvclk mismatched, modes are based on 24MHz\n");
ret = clk_prepare_enable(ov13850->xvclk);
if (ret < 0) {
dev_err(dev, "Failed to enable xvclk\n");
return ret;
}
}
if (!IS_ERR(ov13850->reset_gpio))
gpiod_set_value_cansleep(ov13850->reset_gpio, 0);
ret = regulator_bulk_enable(OV13850_NUM_SUPPLIES, ov13850->supplies);
if (ret < 0) {
dev_err(dev, "Failed to enable regulators\n");
goto disable_clk;
}
if (!IS_ERR(ov13850->power_gpio))
gpiod_set_value_cansleep(ov13850->power_gpio, 1);
if (!IS_ERR(ov13850->reset_gpio))
gpiod_set_value_cansleep(ov13850->reset_gpio, 1);
usleep_range(500, 1000);
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 1);
/* 8192 cycles prior to first SCCB transaction */
delay_us = ov13850_cal_delay(8192);
usleep_range(delay_us, delay_us * 2);
return 0;
disable_clk:
if (clkout_enabled_index)
clk_disable_unprepare(ov13850->xvclk);
return ret;
}
static void __ov13850_power_off(struct ov13850 *ov13850)
{
int ret;
struct device *dev = &ov13850->client->dev;
if (!IS_ERR(ov13850->pwdn_gpio))
gpiod_set_value_cansleep(ov13850->pwdn_gpio, 0);
if (clkout_enabled_index)
clk_disable_unprepare(ov13850->xvclk);
//if (!IS_ERR(ov13850->power_gpio))
// gpiod_set_value_cansleep(ov13850->power_gpio, 0);
//if (!IS_ERR(ov13850->reset_gpio))
// gpiod_set_value_cansleep(ov13850->reset_gpio, 0);
if (!IS_ERR_OR_NULL(ov13850->pins_sleep)) {
ret = pinctrl_select_state(ov13850->pinctrl,
ov13850->pins_sleep);
if (ret < 0)
dev_dbg(dev, "could not set pins\n");
}
regulator_bulk_disable(OV13850_NUM_SUPPLIES, ov13850->supplies);
}
static int ov13850_runtime_resume(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
return __ov13850_power_on(ov13850);
}
static int ov13850_runtime_suspend(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
__ov13850_power_off(ov13850);
return 0;
}
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static int ov13850_open(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh)
{
struct ov13850 *ov13850 = to_ov13850(sd);
struct v4l2_mbus_framefmt *try_fmt =
v4l2_subdev_get_try_format(sd, fh->pad, 0);
const struct ov13850_mode *def_mode = &supported_modes[0];
mutex_lock(&ov13850->mutex);
/* Initialize try_fmt */
try_fmt->width = def_mode->width;
try_fmt->height = def_mode->height;
try_fmt->code = MEDIA_BUS_FMT_SBGGR10_1X10;
try_fmt->field = V4L2_FIELD_NONE;
mutex_unlock(&ov13850->mutex);
/* No crop or compose */
return 0;
}
#endif
static int ov13850_enum_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_interval_enum *fie)
{
if (fie->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fie->code != MEDIA_BUS_FMT_SBGGR10_1X10)
return -EINVAL;
fie->width = supported_modes[fie->index].width;
fie->height = supported_modes[fie->index].height;
fie->interval = supported_modes[fie->index].max_fps;
return 0;
}
static int ov13850_g_mbus_config(struct v4l2_subdev *sd,
struct v4l2_mbus_config *config)
{
u32 val = 0;
val = 1 << (OV13850_LANES - 1) |
V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK;
config->type = V4L2_MBUS_CSI2;
config->flags = val;
return 0;
}
static const struct dev_pm_ops ov13850_pm_ops = {
SET_RUNTIME_PM_OPS(ov13850_runtime_suspend,
ov13850_runtime_resume, NULL)
};
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static const struct v4l2_subdev_internal_ops ov13850_internal_ops = {
.open = ov13850_open,
};
#endif
static const struct v4l2_subdev_core_ops ov13850_core_ops = {
.s_power = ov13850_s_power,
.ioctl = ov13850_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl32 = ov13850_compat_ioctl32,
#endif
};
static const struct v4l2_subdev_video_ops ov13850_video_ops = {
.s_stream = ov13850_s_stream,
.g_frame_interval = ov13850_g_frame_interval,
.g_mbus_config = ov13850_g_mbus_config,
};
static const struct v4l2_subdev_pad_ops ov13850_pad_ops = {
.enum_mbus_code = ov13850_enum_mbus_code,
.enum_frame_size = ov13850_enum_frame_sizes,
.enum_frame_interval = ov13850_enum_frame_interval,
.get_fmt = ov13850_get_fmt,
.set_fmt = ov13850_set_fmt,
};
static const struct v4l2_subdev_ops ov13850_subdev_ops = {
.core = &ov13850_core_ops,
.video = &ov13850_video_ops,
.pad = &ov13850_pad_ops,
};
static int ov13850_set_ctrl(struct v4l2_ctrl *ctrl)
{
struct ov13850 *ov13850 = container_of(ctrl->handler,
struct ov13850, ctrl_handler);
struct i2c_client *client = ov13850->client;
s64 max;
int ret = 0;
/* Propagate change of current control to all related controls */
switch (ctrl->id) {
case V4L2_CID_VBLANK:
/* Update max exposure while meeting expected vblanking */
max = ov13850->cur_mode->height + ctrl->val - 4;
__v4l2_ctrl_modify_range(ov13850->exposure,
ov13850->exposure->minimum, max,
ov13850->exposure->step,
ov13850->exposure->default_value);
break;
}
if (!pm_runtime_get_if_in_use(&client->dev))
return 0;
switch (ctrl->id) {
case V4L2_CID_EXPOSURE:
/* 4 least significant bits of expsoure are fractional part */
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_EXPOSURE,
OV13850_REG_VALUE_24BIT,
ctrl->val << 4);
break;
case V4L2_CID_ANALOGUE_GAIN:
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_GAIN_H,
OV13850_REG_VALUE_08BIT,
(ctrl->val >> OV13850_GAIN_H_SHIFT) &
OV13850_GAIN_H_MASK);
ret |= ov13850_write_reg(ov13850->client,
OV13850_REG_GAIN_L,
OV13850_REG_VALUE_08BIT,
ctrl->val & OV13850_GAIN_L_MASK);
break;
case V4L2_CID_VBLANK:
ret = ov13850_write_reg(ov13850->client,
OV13850_REG_VTS,
OV13850_REG_VALUE_16BIT,
ctrl->val + ov13850->cur_mode->height);
break;
case V4L2_CID_TEST_PATTERN:
ret = ov13850_enable_test_pattern(ov13850, ctrl->val);
break;
default:
dev_warn(&client->dev, "%s Unhandled id:0x%x, val:0x%x\n",
__func__, ctrl->id, ctrl->val);
break;
}
pm_runtime_put(&client->dev);
return ret;
}
static const struct v4l2_ctrl_ops ov13850_ctrl_ops = {
.s_ctrl = ov13850_set_ctrl,
};
static int ov13850_initialize_controls(struct ov13850 *ov13850)
{
const struct ov13850_mode *mode;
struct v4l2_ctrl_handler *handler;
struct v4l2_ctrl *ctrl;
s64 exposure_max, vblank_def;
u32 h_blank;
int ret;
handler = &ov13850->ctrl_handler;
mode = ov13850->cur_mode;
ret = v4l2_ctrl_handler_init(handler, 8);
if (ret)
return ret;
handler->lock = &ov13850->mutex;
ctrl = v4l2_ctrl_new_int_menu(handler, NULL, V4L2_CID_LINK_FREQ,
0, 0, link_freq_menu_items);
if (ctrl)
ctrl->flags |= V4L2_CTRL_FLAG_READ_ONLY;
v4l2_ctrl_new_std(handler, NULL, V4L2_CID_PIXEL_RATE,
0, OV13850_PIXEL_RATE, 1, OV13850_PIXEL_RATE);
h_blank = mode->hts_def - mode->width;
ov13850->hblank = v4l2_ctrl_new_std(handler, NULL, V4L2_CID_HBLANK,
h_blank, h_blank, 1, h_blank);
if (ov13850->hblank)
ov13850->hblank->flags |= V4L2_CTRL_FLAG_READ_ONLY;
vblank_def = mode->vts_def - mode->height;
ov13850->vblank = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_VBLANK, vblank_def,
OV13850_VTS_MAX - mode->height,
1, vblank_def);
exposure_max = mode->vts_def - 4;
ov13850->exposure = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_EXPOSURE, OV13850_EXPOSURE_MIN,
exposure_max, OV13850_EXPOSURE_STEP,
mode->exp_def);
ov13850->anal_gain = v4l2_ctrl_new_std(handler, &ov13850_ctrl_ops,
V4L2_CID_ANALOGUE_GAIN, OV13850_GAIN_MIN,
OV13850_GAIN_MAX, OV13850_GAIN_STEP,
OV13850_GAIN_DEFAULT);
ov13850->test_pattern = v4l2_ctrl_new_std_menu_items(handler,
&ov13850_ctrl_ops, V4L2_CID_TEST_PATTERN,
ARRAY_SIZE(ov13850_test_pattern_menu) - 1,
0, 0, ov13850_test_pattern_menu);
if (handler->error) {
ret = handler->error;
dev_err(&ov13850->client->dev,
"Failed to init controls(%d)\n", ret);
goto err_free_handler;
}
ov13850->subdev.ctrl_handler = handler;
return 0;
err_free_handler:
v4l2_ctrl_handler_free(handler);
return ret;
}
static int ov13850_check_sensor_id(struct ov13850 *ov13850,
struct i2c_client *client)
{
struct device *dev = &ov13850->client->dev;
u32 id = 0;
int ret;
int time=5;
while (time--){
ret = ov13850_read_reg(client, OV13850_REG_CHIP_ID,
OV13850_REG_VALUE_16BIT, &id);
if (id != CHIP_ID) {
dev_err(dev, "Unexpected sensor id(%06x), ret(%d)\n", id, ret);
if (time==1){
if(client->addr == OV13850_I2C_ADDR1)
client->addr = OV13850_I2C_ADDR0;
else
client->addr = OV13850_I2C_ADDR1;
}
udelay(10);
}
}
ret = ov13850_read_reg(client, OV13850_CHIP_REVISION_REG,
OV13850_REG_VALUE_08BIT, &id);
if (ret) {
dev_err(dev, "Read chip revision register error\n");
return ret;
}
if (id == OV13850_R2A)
ov13850_global_regs = ov13850_global_regs_r2a;
else
ov13850_global_regs = ov13850_global_regs_r1a;
dev_info(dev, "Detected OV%06x sensor, REVISION 0x%x\n", CHIP_ID, id);
return 0;
}
static int ov13850_configure_regulators(struct ov13850 *ov13850)
{
unsigned int i;
for (i = 0; i < OV13850_NUM_SUPPLIES; i++)
ov13850->supplies[i].supply = ov13850_supply_names[i];
return devm_regulator_bulk_get(&ov13850->client->dev,
OV13850_NUM_SUPPLIES,
ov13850->supplies);
}
static void free_gpio(struct ov13850 *ov13850)
{
dev_info(&ov13850->client->dev, "%s(%d) enter!\n", __func__, __LINE__);
if (IS_ERR(ov13850->pwdn_gpio)){
gpio_free(desc_to_gpio(ov13850->pwdn_gpio));
}
if (IS_ERR(ov13850->reset_gpio)){
gpio_free(desc_to_gpio(ov13850->reset_gpio));
}
}
static int ov13850_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct device *dev = &client->dev;
struct device_node *node = dev->of_node;
struct ov13850 *ov13850;
struct v4l2_subdev *sd;
char facing[2];
int ret;
struct gpio_desc *pwdn_gpios = NULL, *reset_gpios = NULL;
unsigned int pwdn = -1, reset = -1;
enum of_gpio_flags flags;
dev_info(dev, "driver version: %02x.%02x.%02x",
DRIVER_VERSION >> 16,
(DRIVER_VERSION & 0xff00) >> 8,
DRIVER_VERSION & 0x00ff);
ov13850 = devm_kzalloc(dev, sizeof(*ov13850), GFP_KERNEL);
if (!ov13850)
return -ENOMEM;
ret = of_property_read_u32(node, RKMODULE_CAMERA_MODULE_INDEX,
&ov13850->module_index);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_FACING,
&ov13850->module_facing);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_NAME,
&ov13850->module_name);
ret |= of_property_read_string(node, RKMODULE_CAMERA_LENS_NAME,
&ov13850->len_name);
if (ret) {
dev_err(dev, "could not get module information!\n");
return -EINVAL;
}
ov13850->client = client;
ov13850->cur_mode = &supported_modes[0];
ret = of_property_read_u32(node, "firefly,clkout-enabled-index", &clkout_enabled_index);
if (ret){
dev_err(dev, "could not get firefly,clkout-enabled-index, default output xvclk .");
clkout_enabled_index = 1;
}
if (clkout_enabled_index){
ov13850->xvclk = devm_clk_get(dev, "xvclk");
if (IS_ERR(ov13850->xvclk)) {
dev_err(dev, "Failed to get xvclk\n");
return -EINVAL;
}
}
ov13850->power_gpio = devm_gpiod_get(dev, "power", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->power_gpio))
dev_warn(dev, "Failed to get power-gpios, maybe no use\n");
ov13850->reset_gpio = devm_gpiod_get(dev, "reset", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->reset_gpio)) {
dev_info(dev, "Failed to get reset-gpios, maybe no use\n");
reset = of_get_named_gpio_flags(node, "reset-gpios", 0, &flags);
reset_gpios = gpio_to_desc(reset);
if (IS_ERR(reset_gpios))
dev_info(dev, "Failed to get reset-gpios again\n");
else
ov13850->reset_gpio = reset_gpios;
}
ov13850->pwdn_gpio = devm_gpiod_get(dev, "pwdn", GPIOD_OUT_LOW);
if (IS_ERR(ov13850->pwdn_gpio)) {
dev_info(dev, "Failed to get pwdn-gpios, maybe no use\n");
pwdn = of_get_named_gpio_flags(node, "pwdn-gpios", 0, &flags);
pwdn_gpios = gpio_to_desc(pwdn);
if (IS_ERR(pwdn_gpios))
dev_info(dev, "Failed to get pwdn-gpios again\n");
else
ov13850->pwdn_gpio = pwdn_gpios;
}
ret = ov13850_configure_regulators(ov13850);
if (ret) {
dev_err(dev, "Failed to get power regulators\n");
return ret;
}
ov13850->pinctrl = devm_pinctrl_get(dev);
if (!IS_ERR(ov13850->pinctrl)) {
ov13850->pins_default =
pinctrl_lookup_state(ov13850->pinctrl,
OF_CAMERA_PINCTRL_STATE_DEFAULT);
if (IS_ERR(ov13850->pins_default))
dev_err(dev, "could not get default pinstate\n");
ov13850->pins_sleep =
pinctrl_lookup_state(ov13850->pinctrl,
OF_CAMERA_PINCTRL_STATE_SLEEP);
if (IS_ERR(ov13850->pins_sleep))
dev_err(dev, "could not get sleep pinstate\n");
}
mutex_init(&ov13850->mutex);
sd = &ov13850->subdev;
v4l2_i2c_subdev_init(sd, client, &ov13850_subdev_ops);
ret = ov13850_initialize_controls(ov13850);
if (ret)
goto err_destroy_mutex;
ret = __ov13850_power_on(ov13850);
if (ret)
goto err_free_handler;
ret = ov13850_check_sensor_id(ov13850, client);
if (ret)
goto err_power_off;
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
sd->internal_ops = &ov13850_internal_ops;
sd->flags |= V4L2_SUBDEV_FL_HAS_DEVNODE;
#endif
#if defined(CONFIG_MEDIA_CONTROLLER)
ov13850->pad.flags = MEDIA_PAD_FL_SOURCE;
sd->entity.function = MEDIA_ENT_F_CAM_SENSOR;
ret = media_entity_pads_init(&sd->entity, 1, &ov13850->pad);
if (ret < 0)
goto err_power_off;
#endif
memset(facing, 0, sizeof(facing));
if (strcmp(ov13850->module_facing, "back") == 0)
facing[0] = 'b';
else
facing[0] = 'f';
snprintf(sd->name, sizeof(sd->name), "m%02d_%s_%s %s",
ov13850->module_index, facing,
OV13850_NAME, dev_name(sd->dev));
ret = v4l2_async_register_subdev_sensor_common(sd);
if (ret) {
dev_err(dev, "v4l2 async register subdev failed\n");
goto err_clean_entity;
}
pm_runtime_set_active(dev);
pm_runtime_enable(dev);
pm_runtime_idle(dev);
return 0;
err_clean_entity:
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
err_power_off:
__ov13850_power_off(ov13850);
free_gpio(ov13850);
err_free_handler:
v4l2_ctrl_handler_free(&ov13850->ctrl_handler);
err_destroy_mutex:
mutex_destroy(&ov13850->mutex);
return ret;
}
static int ov13850_remove(struct i2c_client *client)
{
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13850 *ov13850 = to_ov13850(sd);
v4l2_async_unregister_subdev(sd);
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
v4l2_ctrl_handler_free(&ov13850->ctrl_handler);
mutex_destroy(&ov13850->mutex);
pm_runtime_disable(&client->dev);
if (!pm_runtime_status_suspended(&client->dev))
__ov13850_power_off(ov13850);
pm_runtime_set_suspended(&client->dev);
return 0;
}
#if IS_ENABLED(CONFIG_OF)
static const struct of_device_id ov13850_of_match[] = {
{ .compatible = "ovti,ov13850" },
{},
};
MODULE_DEVICE_TABLE(of, ov13850_of_match);
#endif
static const struct i2c_device_id ov13850_match_id[] = {
{ "ovti,ov13850", 0 },
{ },
};
static struct i2c_driver ov13850_i2c_driver = {
.driver = {
.name = OV13850_NAME,
.pm = &ov13850_pm_ops,
.of_match_table = of_match_ptr(ov13850_of_match),
},
.probe = &ov13850_probe,
.remove = &ov13850_remove,
.id_table = ov13850_match_id,
};
static int __init sensor_mod_init(void)
{
return i2c_add_driver(&ov13850_i2c_driver);
}
static void __exit sensor_mod_exit(void)
{
i2c_del_driver(&ov13850_i2c_driver);
}
device_initcall_sync(sensor_mod_init);
module_exit(sensor_mod_exit);
MODULE_DESCRIPTION("OmniVision ov13850 sensor driver");
MODULE_LICENSE("GPL v2");
参考资料:
http://www.friendlyelec.com.cn/agent.asp
http://www.friendlyelec.com.cn/
https://download.friendlyelec.com/NanoPC-T4
https://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4/zh#.E4.B8.8B.E8.BD.BDAndroid10.E6.BA.90.E4.BB.A3.E7.A0.81
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.37562e8dcotDm6&id=570312633249&_u=7ju3ku004a
友善NanoPC-T4瑞芯微RK3399开发板ROS双摄4K播放开源AI智能安卓10
WiKi维基教程(固件介绍,使用说明,操作步骤等)
http://wiki.friendlyelec.com/wiki/index.php/NanoPC-T4
系统固件下载
https://dl.friendlyelec.com/nanopct4
原理图(pdf格式)
http://wiki.friendlyelec.com/wiki/images/e/e0/NanoPC-T4-1902-Schematic.pdf
尺寸图(dxf格式)
http://wiki.friendlyelec.com/wiki/images/b/bc/NanoPC-T4_1802_Drawing%28dxf%29.zip
http://www.friendlyelec.com.cn/nanopi-m4.asp
NanoPi M4 | NanoPi M4V2
https://wiki.friendlyelec.com/wiki/index.php/NanoPi_M4/zh
15.3 编译Android10源代码
15.3.1 下载Android10源代码
有以下两种途径获取 Android10 的源代码,都需要联网:
使用网盘里的git repo压缩包
网盘下载地址: 点击进入
https://download.friendlyelec.com/NanoPiM4
https://pan.baidu.com/share/init?surl=oBLn9H31hILJKEPQXgrUog
提取码:yn6r
相关文章:
20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850
20231229在Firefly的AIO-3399J开发板的Android11使用挖掘机的DTS配置单前后摄像头ov13850 2023/12/29 11:10 开发板:Firefly的AIO-3399J【RK3399】 SDK:rk3399-android-11-r20211216.tar.xz【Android11】 Android11.0.tar.bz2.aa【ToyBrick】 Android11.…...

九台虚拟机网站流量分析项目启动步骤
文章目录 零、操作概述一、服务器分配二、9台虚拟机相互免密登录三、Nginx(反向代理服务器)四、Tomcat(Web服务器)五、测试Nginx反向代理是否成功六、Flume集群配置七、修改LogDemo项目八、项目1703FluxStorm九、Hadoop集群十、整个集群的启动十一、部署项目十二、测试项目…...

迅软科技助力高科技防泄密:从华为事件中汲取经验教训
近期,涉及华为芯片技术被窃一事引起广泛关注。据报道,华为海思的两个高管张某、刘某离职后成立尊湃通讯,然后以支付高薪、股权支付等方式,诱导多名海思研发人员跳槽其公司,并指使这些人员在离职前通过摘抄、截屏等方式…...
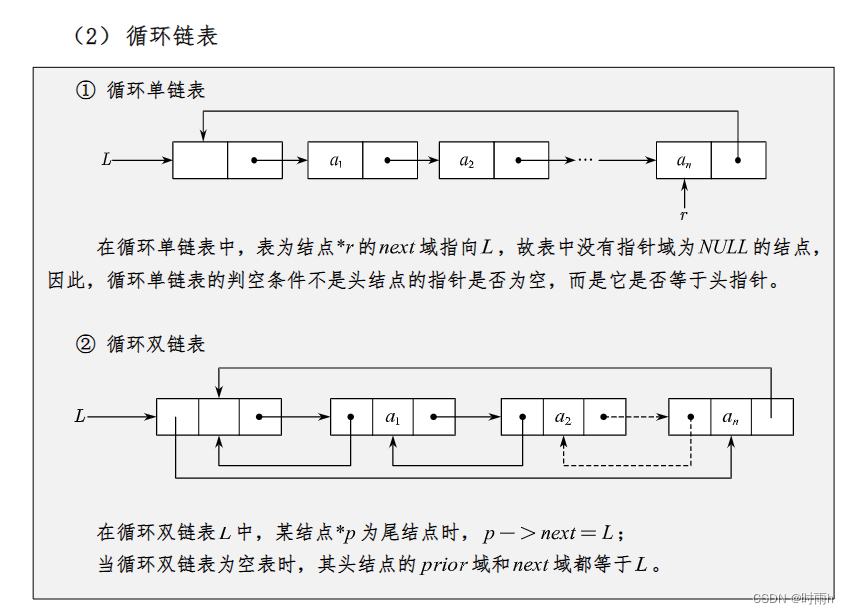
数据结构期末复习(2)链表
链表 链表(Linked List)是一种常见的数据结构,用于存储一系列具有相同类型的元素。链表由节点(Node)组成,每个节点包含两部分:数据域(存储元素值)和指针域(指…...

Hive中支持毫秒级别的时间精度
实际上,Hive 在较新的版本中已经支持毫秒级别的时间精度。你可以通过设置 hive.exec.default.serialization.format 和 mapred.output.value.format 属性为 1,启用 Hive 的时间精度为毫秒级。可以使用以下命令进行设置: set hive.exec.defau…...
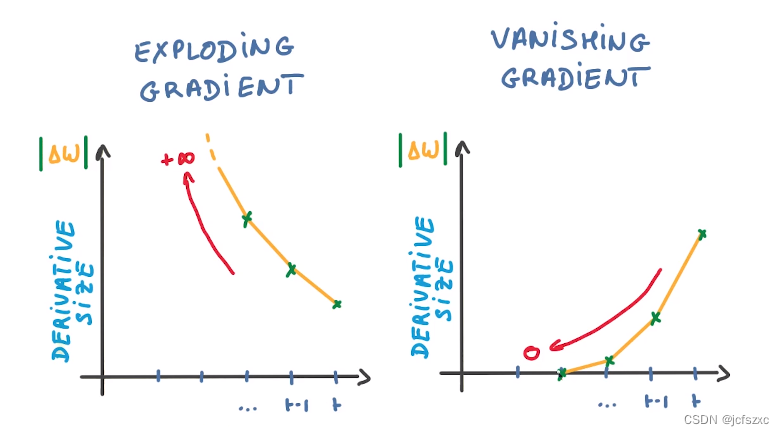
【深度学习:Recurrent Neural Networks】循环神经网络(RNN)的简要概述
【深度学习】循环神经网络(RNN):连接过去与未来的桥梁 循环神经网络简介什么是循环神经网络 (RNN)?传统 RNN 的架构循环神经网络如何工作?常用激活函数RNN的优点和缺点RNN 的优点:RNN 的缺点: 循…...
HTML 基础
文章目录 01-标签语法标签结构 03-HTML骨架04-标签的关系05-注释06-标题标签07-段落标签08-换行和水平线09-文本格式化标签10-图像标签图像属性 11-路径相对路径绝对路径 12-超链接标签13-音频14-视频 01-标签语法 HTML 超文本标记语言——HyperText Markup Language。 超文本…...
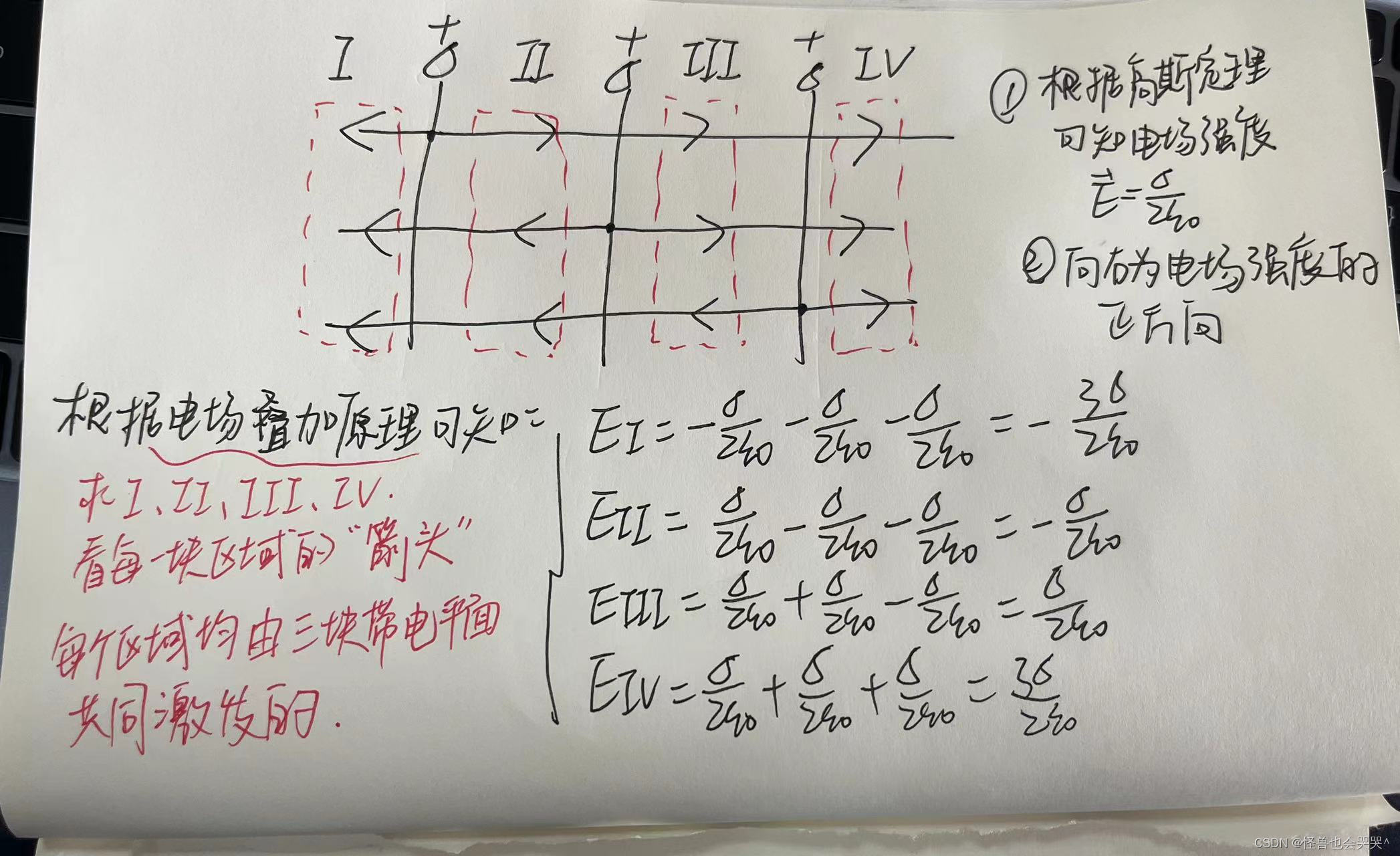
大学物理II-作业1【题解】
1.【单选题】——考查高斯定理 下面关于高斯定理描述正确的是(D )。 A.高斯面上的电场强度是由高斯面内的电荷激发的 B.高斯面上的各点电场强度为零时,高斯面内一定没有电荷 C.通过高斯面的电通量为零时,高斯面上各点电场强度…...

Unity引擎有哪些优点
Unity引擎是一款跨平台的游戏引擎,拥有很多的优点,如跨平台支持、强大的工具和编辑器、灵活的脚本支持、丰富的资源库和强大的社区生态系统等,让他成为众多开发者选择的游戏开发引擎。下面我简单的介绍一下Unity引擎的优点。 跨平台支持 跨…...

【华为机试】2023年真题B卷(python)-猴子爬山
一、题目 题目描述: 一天一只顽猴想去从山脚爬到山顶,途中经过一个有个N个台阶的阶梯,但是这猴子有一个习惯: 每一次只能跳1步或跳3步,试问猴子通过这个阶梯有多少种不同的跳跃方式? 二、输入输出 输入描述…...
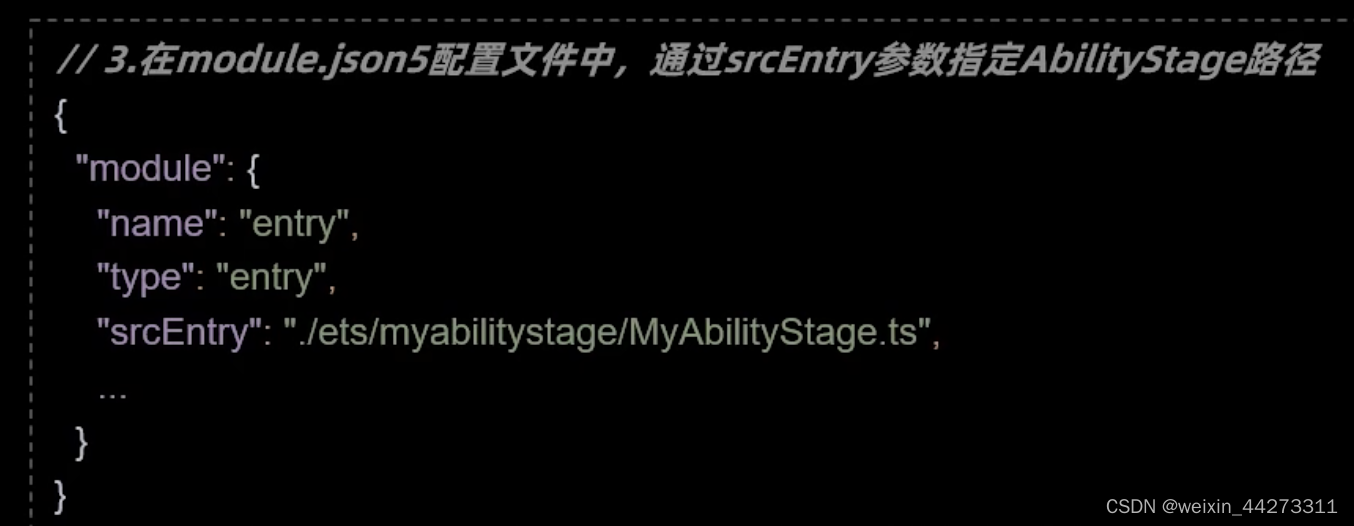
【Harmony OS - Stage应用模型】
基本概念 大类分为: Ability Module: 功能模块 、Library Module: 共享功能模块 编译时概念: Ability Module在编译时打包生成HAP(Harmony Ability Package),一个应用可能会有多个HAP…...
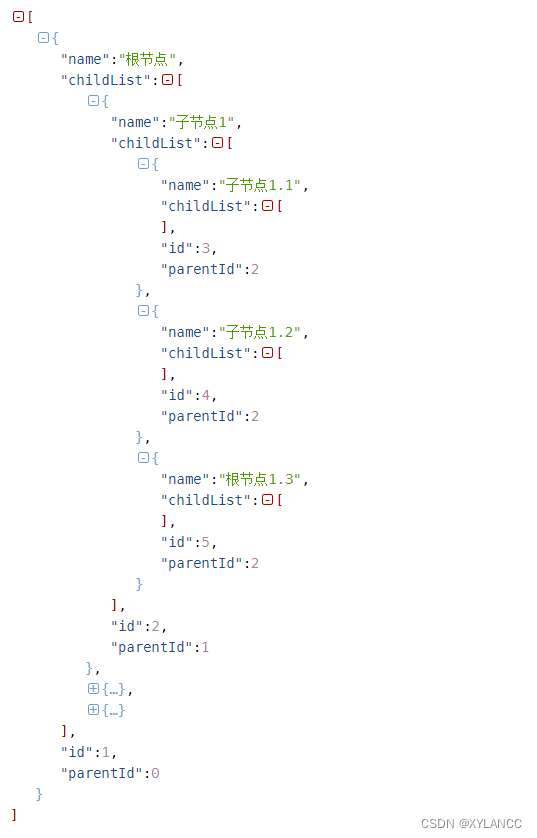
Java 8 中的 Stream 轻松遍历树形结构!
可能平常会遇到一些需求,比如构建菜单,构建树形结构,数据库一般就使用父id来表示,为了降低数据库的查询压力,我们可以使用Java8中的Stream流一次性把数据查出来,然后通过流式处理,我们一起来看看…...
Openwrt修改Dropbear ssh root密码
使用ssh工具连接路由器 输入:passwd root 输入新密码 重复新密码 设置完成 rootImmortalWrt:~# passwd root Changing password for root New password:...
js 对象
js 对象定义 <!DOCTYPE html> <html> <body><h1>JavaScript 对象创建</h1><p id"demo1"></p> <p>new</p> <p id"demo"></p><script> // 创建对象: var persona {fi…...
【SpringBoot】常用注解
RequestBody:自动将请求体中的 json 数据转换为实体类对象。 这个例子凑巧传入的json属性键名和User键名一致,可以直接使用User实体类对象,如果键名不一致则需要用一个Map 类接收参数: PutMapping("/update")public R…...
【模拟电路】软件Circuit JS
一、模拟电路软件Circuit JS 二、Circuit JS软件配置 三、Circuit JS 软件 常见的快捷键 四、Circuit JS软件基础使用 五、Circuit JS软件使用讲解 欧姆定律电阻的串联和并联电容器的充放电过程电感器和实现理想超导的概念电容阻止电压的突变,电感阻止电流的突变LR…...
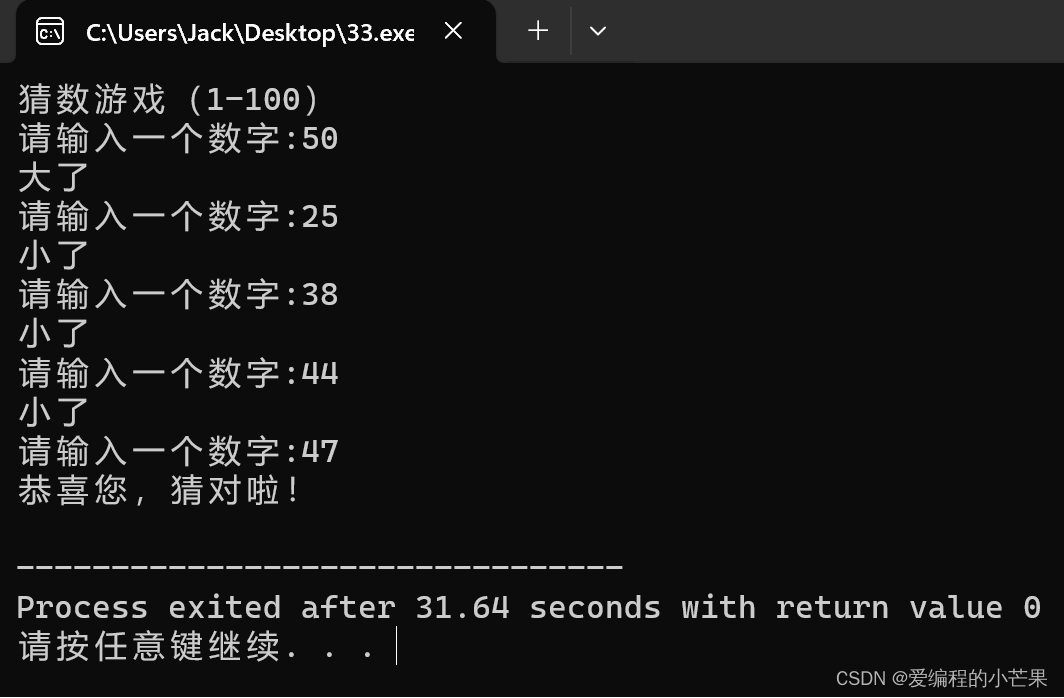
从入门到精通,30天带你学会C++【第十天:猜数游戏】
目录 Everyday English 前言 实战1——猜数游戏 综合指标 游玩方法 代码实现 最终代码 试玩时间 必胜策略 具体演示 结尾 Everyday English All good things come to those who wait. 时间不负有心人 前言 今天是2024年的第一天,新一年,新…...
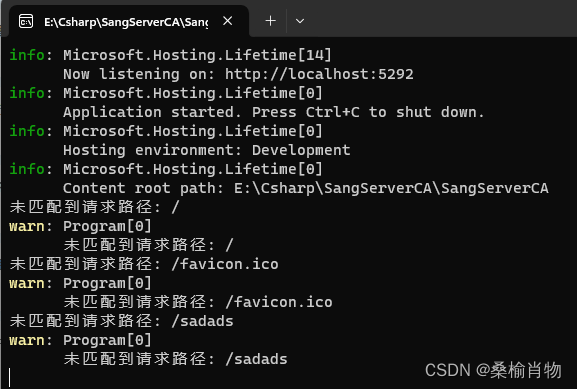
使用ASP.NET MiniAPI 调试未匹配请求路径
本文将介绍如何在使用ASP.NET MiniAPI时调试未匹配到的请求路径。我们将详细讨论使用MapFallback方法、中间件等工具来解决此类问题。 1. 引言 ASP.NET MiniAPI是一个轻量级的Web API框架,它可以让我们快速地构建和部署RESTful服务。然而,在开发过程中如…...

数据结构: 位图
位图 概念 用一个bit为来标识数据在不在 功能 节省空间快速查找一个数在不在一个集合中排序 去重求两个集合的交集,并集操作系统中的磁盘标记 简单实现 1.设计思想:一个bit位标识一个数据, 使用char(8bit位)集合来模拟 2.预备工作:a.计算这个数在第几个char b.是这个ch…...
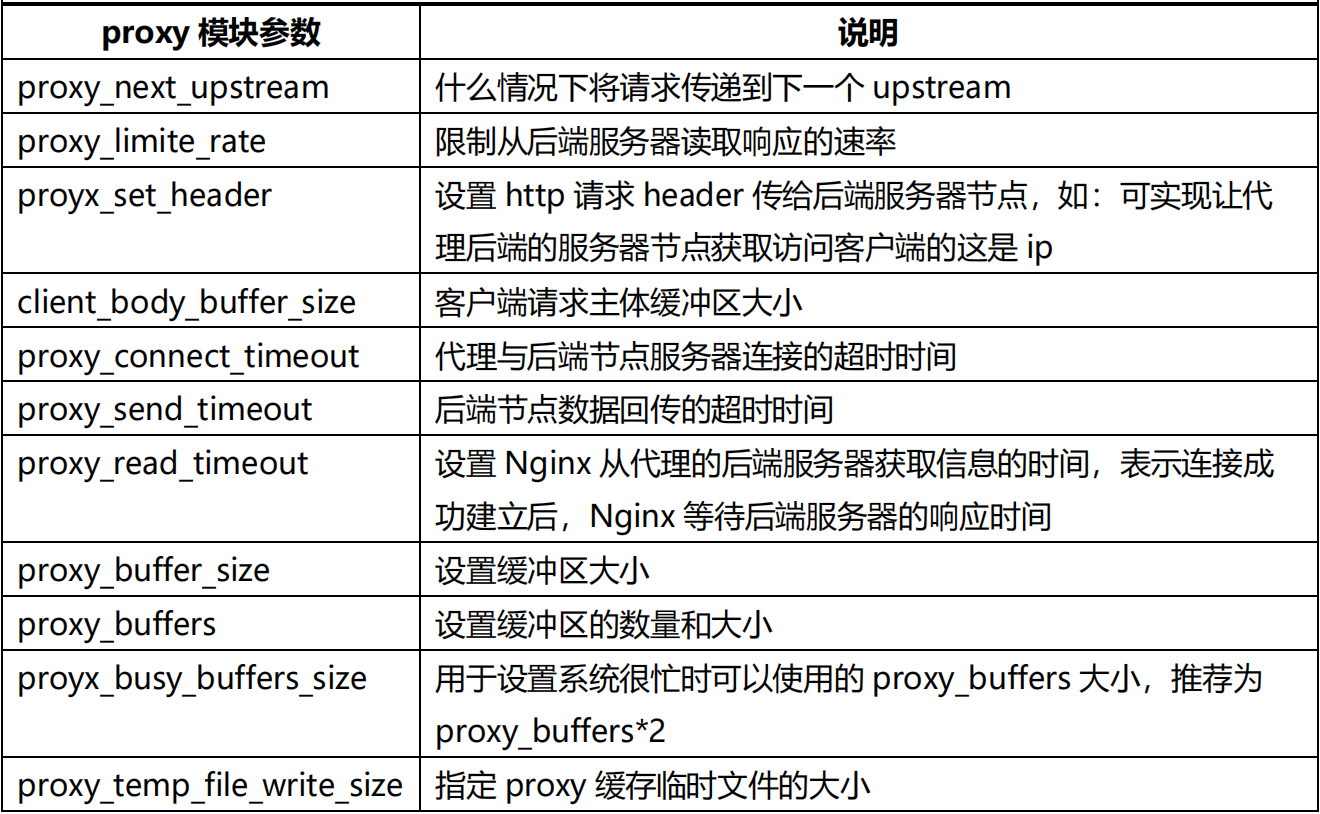
Nginx 反向代理负载均衡
Nginx 反向代理负载均衡 普通的负载均衡软件,如 LVS,其实现的功能只是对请求数据包的转发、传递,从负载均衡下的节点服务器来看,接收到的请求还是来自访问负载均衡器的客户端的真实用户;而反向代理就不一样了…...

研究生必看!千笔AI,多场景适配降重神器
在AI技术迅猛发展的今天,越来越多的学生和研究人员开始借助AI工具提升写作效率,但随之而来的“AI率超标”问题也日益凸显。随着各大查重系统对AI生成内容的识别能力不断提升,论文中若存在明显的AI痕迹,不仅可能导致重复率过高&…...
)
JAVA面试个人简历模板 ——(2026年最新版)
个人简历 基本资料 姓 名:Monster 籍 贯:地球 联系电话:135*****157 电子邮件:steven****163.com 博客:https://blog.csdn.net/Monsterof 工作年限:四年 教育背景 湖南理工学院 计算机科学与技术 本…...

WarcraftHelper:魔兽争霸3现代系统适配引擎
WarcraftHelper:魔兽争霸3现代系统适配引擎 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 引言:经典游戏的现代重生 Warcraf…...

VSCode+ESP-IDF环境搭建避坑指南:解决pip版本导致的安装失败问题
VSCode与ESP-IDF开发环境配置全攻略:从零避坑到高效开发 作为一名长期使用ESP32系列芯片的开发者,我深知搭建一个稳定可靠的开发环境有多么重要。还记得第一次接触ESP-IDF时,光是环境配置就折腾了整整两天,其中pip版本问题是最常见…...

Windows API Hook全攻略:从IAT到Inline Hook的Rust实现对比
Windows API Hook技术深度解析:Rust实现与工程实践指南 在系统级编程领域,API Hook技术一直是开发者手中的瑞士军刀。无论是安全审计、性能分析还是功能扩展,这项技术都展现出惊人的灵活性。本文将带您深入探索Windows平台下四种主流Hook技术…...

AI时代认知三部曲:从底层能力到价值生态
——筑基划界变现,普通人驾驭AI的完整地图 AI浪潮席卷而来,技术迭代日新月异,在这样的时代背景下,一套清晰的认知体系,是普通人站稳脚跟、驾驭变化的关键。 本文以“筑基划界变现”为完整脉络,为你铺开一…...

74HC595避坑指南:LED点阵显示残影消除的3种实战方法
74HC595实战精要:彻底解决LED点阵残影的3大技术方案 LED点阵显示屏在嵌入式系统中应用广泛,但动态扫描时出现的残影问题常常困扰开发者。本文将深入剖析残影成因,并提供三种经过验证的解决方案,帮助您实现专业级的显示效果。 1. 残…...
)
解决Keil中AT32单片机缺失问题的3种方法(附详细操作截图)
解决Keil中AT32单片机支持包缺失的实战指南 当你第一次在Keil MDK中创建AT32单片机项目时,可能会遇到一个令人沮丧的问题——软件提示找不到对应的设备支持包。这种情况在尝试使用较新型号的国产单片机时尤为常见。作为一位长期使用Keil进行嵌入式开发的工程师&…...
)
从MATLAB到FPGA:手把手教你用Verilog实现图像直方图统计(附仿真对比)
从MATLAB到FPGA:手把手教你用Verilog实现图像直方图统计(附仿真对比) 在数字图像处理领域,直方图统计是最基础也是最重要的分析工具之一。它能够直观展示图像中各个灰度级的分布情况,为后续的图像增强、分割等操作提供…...

解锁DeepSeek API的无限可能:从入门到全场景集成
1. 从零开始认识DeepSeek API 第一次听说DeepSeek API时,我和大多数开发者一样好奇:这玩意儿到底能干什么?简单来说,它就像是一个超级智能的"问答机器人",你可以通过编程的方式让它帮你处理各种文本相关的任…...