RT-Thread基于AT32单片机的CAN应用
1 硬件电路

2 RT-Thread驱动配置
RT-Studio中没有CAN相关的图形配置,需要手动修改board.h。在board.h的末尾,增加相关的BSP配置。
#define RT_CAN_USING_HDR
#define BSP_USING_CAN1
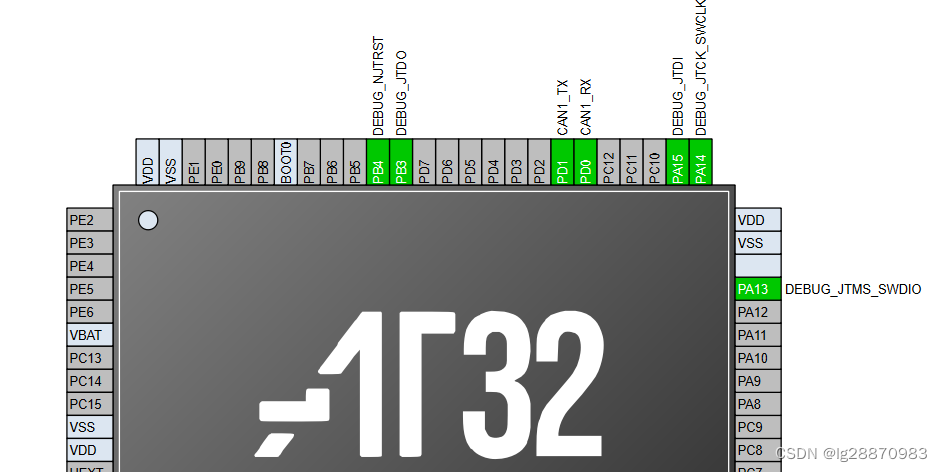
3 IO配置
at32_msp.c中的IO配置是PB9和PB10,掌上实验室V9实际采用的是PD0和PD1,需要修改CAN1相关的IO配置代码。
IO配置代码可以采用AT32_workbench生成,如下图所示。
at32a403a_wk_config.c中找到相关代码,修改RT-Studio中的at32_msp.c的相关代码,如下所示:
void at32_msp_can_init(void *instance)
{
#if defined (BSP_USING_CAN1) || defined (BSP_USING_CAN2)gpio_init_type gpio_init_struct;can_type *can_x = (can_type *)instance;gpio_default_para_init(&gpio_init_struct);gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;
#ifdef BSP_USING_CAN1if(CAN1 == can_x){crm_periph_clock_enable(CRM_CAN1_PERIPH_CLOCK, TRUE);
// crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);
// crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);
//
// gpio_init_struct.gpio_mode = GPIO_MODE_MUX;
// gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;
// gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
// gpio_init_struct.gpio_pins = GPIO_PINS_9;
// gpio_init(GPIOB, &gpio_init_struct);
// gpio_pin_remap_config(CAN1_GMUX_0010, TRUE);
//
// gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;
// gpio_init_struct.gpio_pull = GPIO_PULL_NONE;
// gpio_init_struct.gpio_pins = GPIO_PINS_8;
// gpio_init(GPIOB, &gpio_init_struct);crm_periph_clock_enable(CRM_GPIOD_PERIPH_CLOCK, TRUE);/* configure the CAN1 TX pin */gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_MODERATE;gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;gpio_init_struct.gpio_mode = GPIO_MODE_MUX;gpio_init_struct.gpio_pins = GPIO_PINS_1;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init(GPIOD, &gpio_init_struct);/* configure the CAN1 RX pin */gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;gpio_init_struct.gpio_pins = GPIO_PINS_0;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init(GPIOD, &gpio_init_struct);/* GPIO PIN remap */gpio_pin_remap_config(CAN1_GMUX_0011, TRUE);}
#endif
#ifdef BSP_USING_CAN2if(CAN2 == can_x){crm_periph_clock_enable(CRM_CAN2_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);gpio_init_struct.gpio_mode = GPIO_MODE_MUX;gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init_struct.gpio_pins = GPIO_PINS_6;gpio_init(GPIOB, &gpio_init_struct);gpio_pin_remap_config(CAN2_GMUX_0001, TRUE);gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init_struct.gpio_pins = GPIO_PINS_5;gpio_init(GPIOB, &gpio_init_struct);}
#endif
#endif
}void at32_msp_emac_init(void *instance)
{
#if defined (BSP_USING_EMAC)gpio_init_type gpio_init_struct;crm_periph_clock_enable(CRM_GPIOA_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_GPIOB_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_GPIOC_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_GPIOD_PERIPH_CLOCK, TRUE);crm_periph_clock_enable(CRM_IOMUX_PERIPH_CLOCK, TRUE);gpio_pin_remap_config(EMAC_MUX, TRUE);gpio_default_para_init(&gpio_init_struct);gpio_init_struct.gpio_drive_strength = GPIO_DRIVE_STRENGTH_STRONGER;gpio_init_struct.gpio_mode = GPIO_MODE_MUX;gpio_init_struct.gpio_out_type = GPIO_OUTPUT_PUSH_PULL;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init_struct.gpio_pins = GPIO_PINS_2;gpio_init(GPIOA, &gpio_init_struct);gpio_init_struct.gpio_pins = GPIO_PINS_11 | GPIO_PINS_12 | GPIO_PINS_13;gpio_init(GPIOB, &gpio_init_struct);gpio_init_struct.gpio_pins = GPIO_PINS_1;gpio_init(GPIOC, &gpio_init_struct);gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init_struct.gpio_pins = GPIO_PINS_1;gpio_init(GPIOA, &gpio_init_struct);gpio_init_struct.gpio_mode = GPIO_MODE_INPUT;gpio_init_struct.gpio_pull = GPIO_PULL_NONE;gpio_init_struct.gpio_pins = GPIO_PINS_8 | GPIO_PINS_9 | GPIO_PINS_10;gpio_init(GPIOD, &gpio_init_struct);
#endif
}
4 时钟配置
drv_can.c中给出了can的bitrate配置代码,如下所示:
#ifdef SOC_SERIES_AT32F403A
/* attention !!! baud calculation example: apbclk / ((ss + bs1 + bs2) * brp), ep: 120 / ((1 + 8 + 3) * 10) = 1MHz*/
/* attention !!! default apbclk 120 mhz */
static const struct at32_baud_rate can_baud_rate_tab[] =
{{CAN1MBaud, {10 , CAN_RSAW_3TQ, CAN_BTS1_8TQ, CAN_BTS2_3TQ}},{CAN800kBaud, {15 , CAN_RSAW_2TQ, CAN_BTS1_7TQ, CAN_BTS2_2TQ}},{CAN500kBaud, {20 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},{CAN250kBaud, {40 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},{CAN125kBaud, {80 , CAN_RSAW_2TQ, CAN_BTS1_9TQ, CAN_BTS2_2TQ}},{CAN100kBaud, {75 , CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},{CAN50kBaud, {150, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},{CAN20kBaud, {375, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}},{CAN10kBaud, {750, CAN_RSAW_2TQ, CAN_BTS1_13TQ, CAN_BTS2_2TQ}}
};
这里要特别注意的是,所有计算是基于apbclk=120MHz。要确认RT-Studio生成的代码的时钟正确,否则需重新配置时钟或修改at32_baud_rate can_baud_rate_tab表格内容。
5 RT-Thread应用示例
#include <rtthread.h>
#include "rtdevice.h"#ifdef RT_USING_CAN#define CAN_DEV_NAME "can1" /* CAN 设备名称 */static struct rt_semaphore rx_sem; /* 用于接收消息的信号量 */
static rt_device_t can_dev; /* CAN 设备句柄 */#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5static rt_thread_t tid1 = RT_NULL;
static volatile int running = 0;static int data_buf[10];
static uint32_t data_cnt = 0;rt_err_t lp40_recv(uint16_t id, uint8_t *msg)
{if(crc_high_first(msg,6)){}return RT_EOK;}/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size) {/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */rt_sem_release(&rx_sem);return RT_EOK;
}static void can_rx_thread(void *parameter) {int i;//rt_err_t res;struct rt_can_msg rxmsg = {0};/* 设置接收回调函数 */rt_device_set_rx_indicate(can_dev, can_rx_call);#ifdef RT_CAN_USING_HDRstruct rt_can_filter_item items[5] = {RT_CAN_FILTER_ITEM_INIT(0x100, 0, 0, 1, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x100~0x1ff,hdr 为 - 1,设置默认过滤表 */RT_CAN_FILTER_ITEM_INIT(0x300, 0, 0, 1, 0x700, RT_NULL, RT_NULL), /* std,match ID:0x300~0x3ff,hdr 为 - 1 */RT_CAN_FILTER_ITEM_INIT(0x211, 0, 0, 1, 0x7ff, RT_NULL, RT_NULL), /* std,match ID:0x211,hdr 为 - 1 */RT_CAN_FILTER_STD_INIT(0x486, RT_NULL, RT_NULL), /* std,match ID:0x486,hdr 为 - 1 */{0x555, 0, 0, 1, 0x7ff, 7,} /* std,match ID:0x555,hdr 为 7,指定设置 7 号过滤表 */};struct rt_can_filter_config cfg = {5, 1, items}; /* 一共有 5 个过滤表 *//* 设置硬件过滤表 */res = rt_device_control(can_dev, RT_CAN_CMD_SET_FILTER, &cfg);RT_ASSERT(res == RT_EOK);
#endifint rx_count = 0;while (running) {/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */rxmsg.hdr_index = -1;/* 阻塞等待接收信号量 */if(rt_sem_take(&rx_sem, RT_WAITING_FOREVER)==RT_EOK){/* 从 CAN 读取一帧数据 */rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));/* 打印数据 ID 及内容 */rt_kprintf("recv %ld : id = %d, ide=%d :", ++rx_count, rxmsg.id, rxmsg.ide);for (i = 0; i < rxmsg.len; i++) {rt_kprintf(" %02x", rxmsg.data[i]);}rt_kprintf("\n");}}
}/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter) {struct rt_can_msg msg = {0};int count = 0;msg.id = 0x123; /* ID 为 0x78 */msg.ide = RT_CAN_STDID; /* 标准格式 *///msg.ide = RT_CAN_EXTID; /* 标准格式 */msg.rtr = RT_CAN_DTR; /* 数据帧 */msg.len = 8; /* 数据长度为 8 *//* 待发送的 8 字节数据 */msg.data[0] = 0x00;msg.data[1] = 0x11;msg.data[2] = 0x22;msg.data[3] = 0x33;msg.data[4] = 0x44;msg.data[5] = 0x55;msg.data[6] = 0x66;msg.data[7] = 0x77;while(running) {/* 线程 1 采用低优先级运行,一直打印计数值 */rt_kprintf("send %d : id = %d, ide=%d :", ++count, msg.id, msg.ide);for(int i=0;i<msg.len;i++)rt_kprintf(" %02x", msg.data[i]);rt_kprintf("\n");rt_device_write(can_dev, 0, &msg, sizeof(msg));for(int i=0;i<100;i++){rt_thread_mdelay(50);if(!running)break;}}rt_device_close(can_dev);
}int can_sample(int argc, char *argv[]) {rt_err_t res;rt_size_t size;rt_thread_t thread;char can_name[RT_NAME_MAX];if (argc == 2) {rt_strncpy(can_name, argv[1], RT_NAME_MAX);} else {rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);}if(running){rt_kprintf("can_sample is running, stop it before restart!\n can_sample_stop\n", can_name);return RT_ERROR;}/* 查找 CAN 设备 */can_dev = rt_device_find(can_name);if (!can_dev) {rt_kprintf("find %s failed!\n", can_name);return RT_ERROR;}running = 1;res = rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);/* 以中断接收及发送方式打开 CAN 设备 */res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);/* 初始化 CAN 接收信号量 *//* 设置 CAN 的工作模式为正常工作模式 */res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void *)RT_CAN_MODE_NORMAL);//res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void *)RT_CAN_MODE_LOOPBACK);res = rt_device_control(can_dev, RT_CAN_CMD_SET_BAUD, (void *)CAN125kBaud);RT_ASSERT(res == RT_EOK);/* 创建数据接收线程 */thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);if (thread != RT_NULL) {rt_thread_startup(thread);} else {rt_kprintf("create can_rx thread failed!\n");}if (size == 0) {rt_kprintf("can dev write data failed!\n");}/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/tid1 = rt_thread_create("thread1",thread1_entry, RT_NULL,THREAD_STACK_SIZE,THREAD_PRIORITY, THREAD_TIMESLICE);/* 如果获得线程控制块,启动这个线程 */if (tid1 != RT_NULL)rt_thread_startup(tid1);elsert_kprintf("start can send fail\n");return res;
}int can_sample_stop(int argc, char *argv[]) {if(running){running = 0;//rt_sem_release(&rx_sem);rt_sem_detach(&rx_sem);}return RT_EOK;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
MSH_CMD_EXPORT(can_sample_stop, can device sample stop);#endif
相关文章:
RT-Thread基于AT32单片机的CAN应用
1 硬件电路 2 RT-Thread驱动配置 RT-Studio中没有CAN相关的图形配置,需要手动修改board.h。在board.h的末尾,增加相关的BSP配置。 #define RT_CAN_USING_HDR #define BSP_USING_CAN13 IO配置 at32_msp.c中的IO配置是PB9和PB10,掌上实验室V…...

LeetCode---121双周赛---数位dp
题目列表 2996. 大于等于顺序前缀和的最小缺失整数 2997. 使数组异或和等于 K 的最少操作次数 2998. 使 X 和 Y 相等的最少操作次数 2999. 统计强大整数的数目 一、大于等于顺序前缀和的最小缺失整数 简单的模拟题,只要按照题目的要求去写代码即可,…...

RT-Thread I/O设备模型
I/O设备模型 绝大部分的嵌入式系统都包括一些I/O(Input/Output,输入/输出)设备,例如仪器上的数据显示屏、工业设备上的串口通信、数据采集设备上用于保存数据的Flash或SD卡,以及网络设备的以太网接口等,都…...

CloudCompare——拟合空间球
目录 1.拟合球2.软件操作3.算法源码4.相关代码 本文由CSDN点云侠原创,CloudCompare——拟合空间球,爬虫自重。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫与GPT生成的文章。 1.拟合球 源码里用到了四点定球,…...

哪个牌子的护眼台灯适合学生?2024护眼台灯推荐
不知道各位父母对孩子的视力健康有没有关注,我国儿童青少年的近视率高达52.7%,也就是说,平均是个儿童中就有五个儿童存在视力问题,而且近视发生年龄提前至3到7岁。作为一名眼部护理博主,孩子从小看书、看屏幕起&#x…...

适用于动态 IT 环境的服务器流量监控软件
服务器在网络性能中起着至关重要的作用,这意味着保持其最佳容量至关重要。企业需要将 AI、ML 和云技术融入其 IT 中,从而提供充分的敏捷性、安全性和灵活性,在这方面,服务器流量监控已成为当务之急。通过定期监控通信、跟踪流量上…...

Java的Jar包和War包
在Java中,JAR(Java Archive)和WAR(Web Archive)都是用于打包和分发Java应用程序的压缩文件格式。它们在不同的应用场景中使用: JAR(Java Archive): 用途: 主要…...
)
第二十一章 javascript数据代理(数据劫持)
文章目录 一、数据劫持对象的访问器属性 二、Object.defineProperty()三、Proxy()四、补充1. Object类新增方法2. Array类新增方法 一、数据劫持 数据劫持:能够拦截到数据被使用或被修改的时机,在这个时机除了可以获取数据的值或对数据的值进行修改之外…...
苹果电脑RAW图像处理软件Capture One Pro 22 mac软件介绍
Capture One Pro 22 for mac是一款专业的RAW文件转换器和图像编辑软件,拥有更新的处理引擎、市场领先的性能和强大的新功能,可为 500 多台高端相机提供具有美丽色彩和令人难以置信的细节的终极图像质量。 Capture One Pro 22 for Mac版软件介绍 Capture…...

phpcms v9后台添加草稿箱功能
一、后台添加文章模板phpcms/modules/content/templates/content_add.tpl.php中94行增加”保存草稿“按钮: <div class"button"><input value"<?php echo L(save_draft);?>" type"submit" name"dosubmit_draf…...
机器人持续学习基准LIBERO系列5——获取显示深度图
0.前置 机器人持续学习基准LIBERO系列1——基本介绍与安装测试机器人持续学习基准LIBERO系列2——路径与基准基本信息机器人持续学习基准LIBERO系列3——相机画面可视化及单步移动更新机器人持续学习基准LIBERO系列4——robosuite最基本demo 1.更改环境设置 LIBERO-master/l…...

Java 面试题 - 多线程并发篇
线程基础 创建线程有几种方式 继承Thread类 可以创建一个继承自Thread类的子类,并重写其run()方法来定义线程的行为。然后可以通过创建该子类的实例来启动线程。 示例代码: class MyThread extends Thread {public void run() {// 定义线程的行为} …...

2401d,讨论d串滑动参数
原文 因为对编译时执行的i串的兴趣,我一直在考虑搞个通用用例,而不是相关i串的用例. 滑动模板参数 请考虑以下模板: void pluto(string s)() {pragma(msg, s); } void test() {pluto!"hello"(); }因为s是编译时参数,这编译,而pragma(msg,s) 期望s为编译时值. voi…...

etcd官方docker镜像及dockerfile问题处理
解决下我之前etcd使用docker镜像启动的坑 1、问题镜像docker-file: 这个dockerfile看着看不出来问题,但如果有人真的执行我之前两篇文章的文件,就会有问题,什么问题呢,无法连接到etcd,由于我是刚装上docker,排查了一圈,包括docker网络及是否是本地docker的网络问题,…...

2023 IoTDB Summit:天谋科技高级开发工程师苏宇荣《汇其流:如何用 IoTDB 流处理框架玩转端边云融合》...
12 月 3 日,2023 IoTDB 用户大会在北京成功举行,收获强烈反响。本次峰会汇集了超 20 位大咖嘉宾带来工业互联网行业、技术、应用方向的精彩议题,多位学术泰斗、企业代表、开发者,深度分享了工业物联网时序数据库 IoTDB 的技术创新…...
Pygame程序的屏幕显示
不同对象的绘制与显示过程 在Pygame中,需要将所有需要在屏幕上显示的内容都绘制在一个display surface上。该Surface通常称为screen surface,它是pygame.display.set_mode()函数返回的Surface对象。 在绘制不同对象时,可以使用不同的绘制方…...
LVGL的List控件的触摸按键和实体按键的处理
在LVGL的List控件使用过程中,虽然通过触摸按键选择item,但是有些场景需要实体按键选取item,但是LVGL 的V8.3中没有像Emwin那样有函数选择list item的函数。LVGL中List引入了Group的概念,把列表项都添加到同一个group中。然后通过更…...
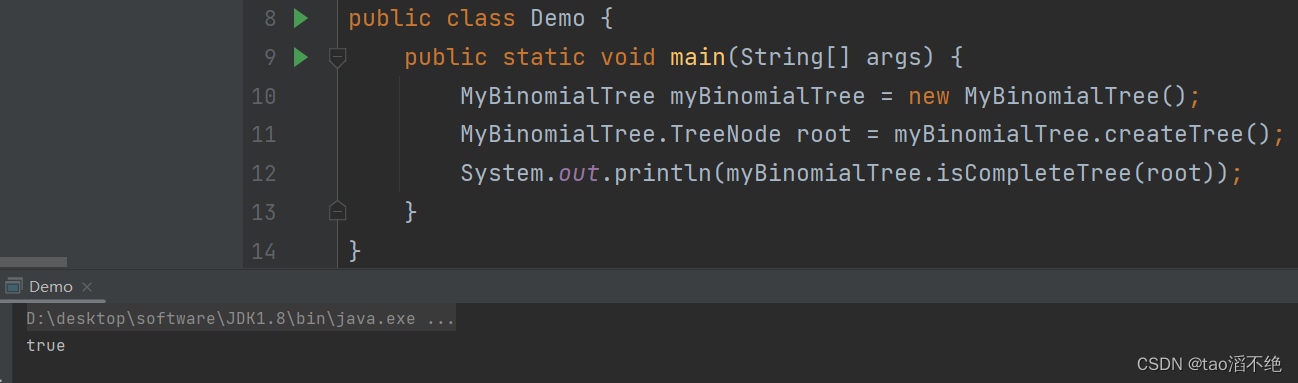
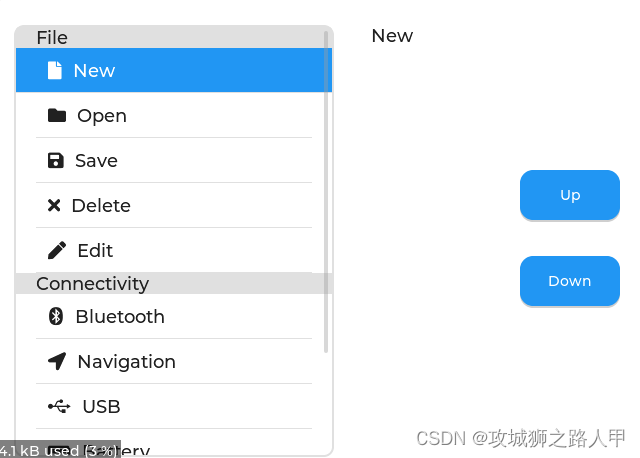
数据结构 模拟实现二叉树(孩子表示法)
目录 一、二叉树的简单概念 (1)关于树的一些概念 (2)二叉树的一些概念及性质 定义二叉树的代码: 二、二叉树的方法实现 (1)createTree (2)preOrder (…...

Android14之解决刷机报错:Can not load Android system. Your data may be corrupt(一百七十七)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 优质专栏:多媒…...

二阶贝塞尔曲线生成弧线
概述 本文分享一个二阶贝塞尔曲线曲线生成弧线的算法。 效果 实现 1. 封装方法 class ArcLine {constructor(from, to, num 100) {this.from from;this.to to;this.num num;return this.getPointList();}getPointList() {const { from, to } thisconst ctrlPoint thi…...

Linux简单的操作
ls ls 查看当前目录 ll 查看详细内容 ls -a 查看所有的内容 ls --help 查看方法文档 pwd pwd 查看当前路径 cd cd 转路径 cd .. 转上一级路径 cd 名 转换路径 …...
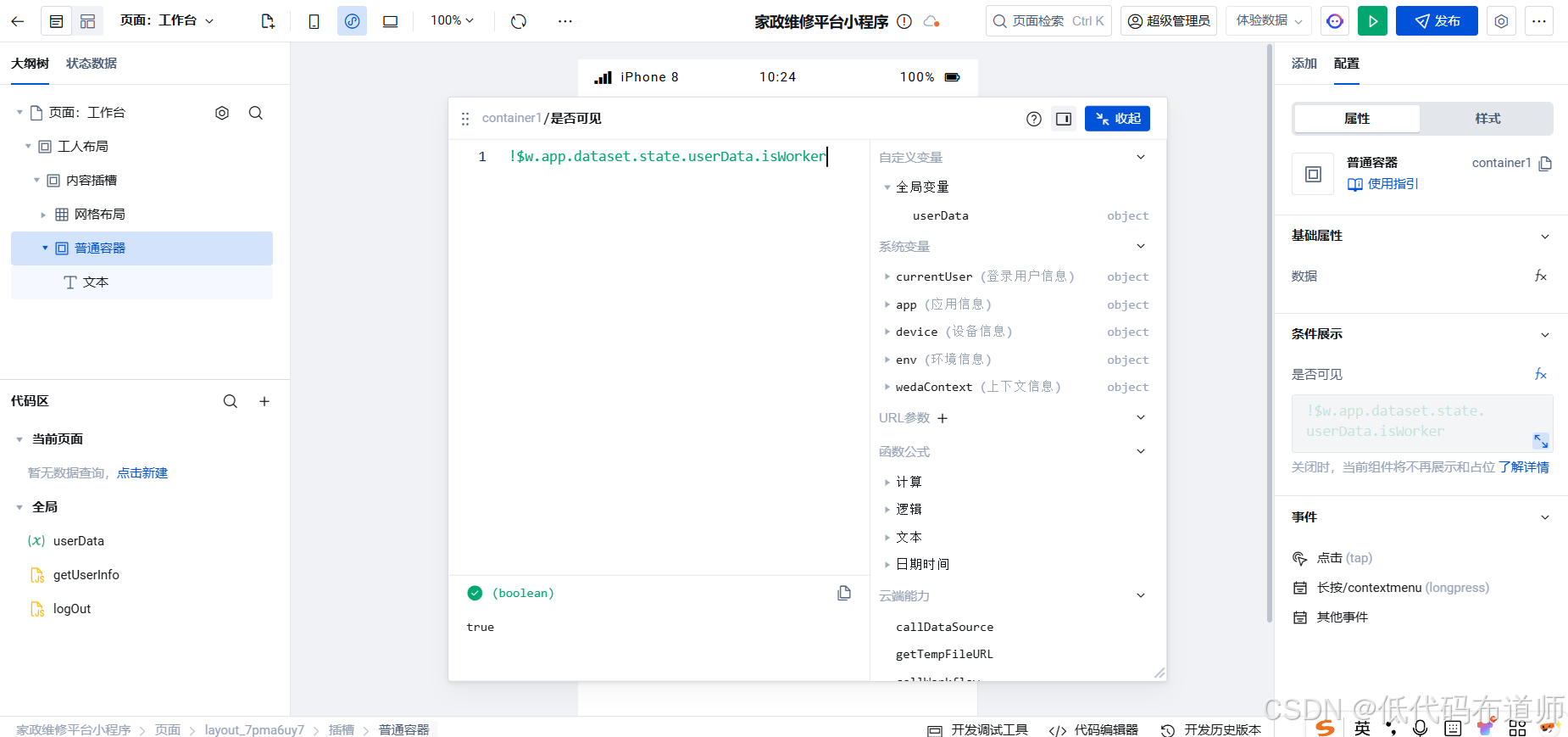
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

生成 Git SSH 证书
🔑 1. 生成 SSH 密钥对 在终端(Windows 使用 Git Bash,Mac/Linux 使用 Terminal)执行命令: ssh-keygen -t rsa -b 4096 -C "your_emailexample.com" 参数说明: -t rsa&#x…...

Axios请求超时重发机制
Axios 超时重新请求实现方案 在 Axios 中实现超时重新请求可以通过以下几种方式: 1. 使用拦截器实现自动重试 import axios from axios;// 创建axios实例 const instance axios.create();// 设置超时时间 instance.defaults.timeout 5000;// 最大重试次数 cons…...

c#开发AI模型对话
AI模型 前面已经介绍了一般AI模型本地部署,直接调用现成的模型数据。这里主要讲述讲接口集成到我们自己的程序中使用方式。 微软提供了ML.NET来开发和使用AI模型,但是目前国内可能使用不多,至少实践例子很少看见。开发训练模型就不介绍了&am…...

ArcGIS Pro制作水平横向图例+多级标注
今天介绍下载ArcGIS Pro中如何设置水平横向图例。 之前我们介绍了ArcGIS的横向图例制作:ArcGIS横向、多列图例、顺序重排、符号居中、批量更改图例符号等等(ArcGIS出图图例8大技巧),那这次我们看看ArcGIS Pro如何更加快捷的操作。…...
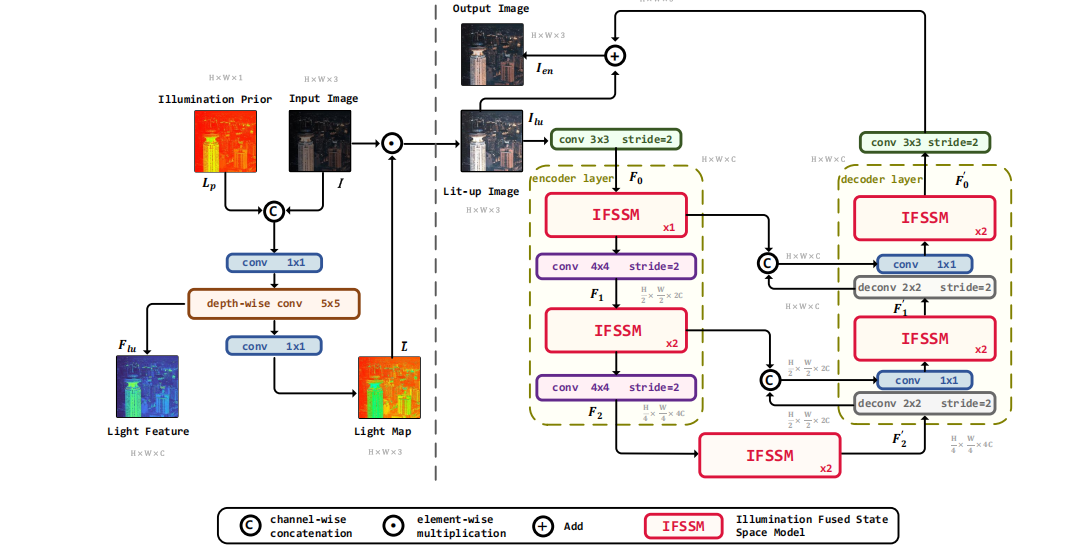
深度学习水论文:mamba+图像增强
🧀当前视觉领域对高效长序列建模需求激增,对Mamba图像增强这方向的研究自然也逐渐火热。原因在于其高效长程建模,以及动态计算优势,在图像质量提升和细节恢复方面有难以替代的作用。 🧀因此短时间内,就有不…...

Kafka主题运维全指南:从基础配置到故障处理
#作者:张桐瑞 文章目录 主题日常管理1. 修改主题分区。2. 修改主题级别参数。3. 变更副本数。4. 修改主题限速。5.主题分区迁移。6. 常见主题错误处理常见错误1:主题删除失败。常见错误2:__consumer_offsets占用太多的磁盘。 主题日常管理 …...
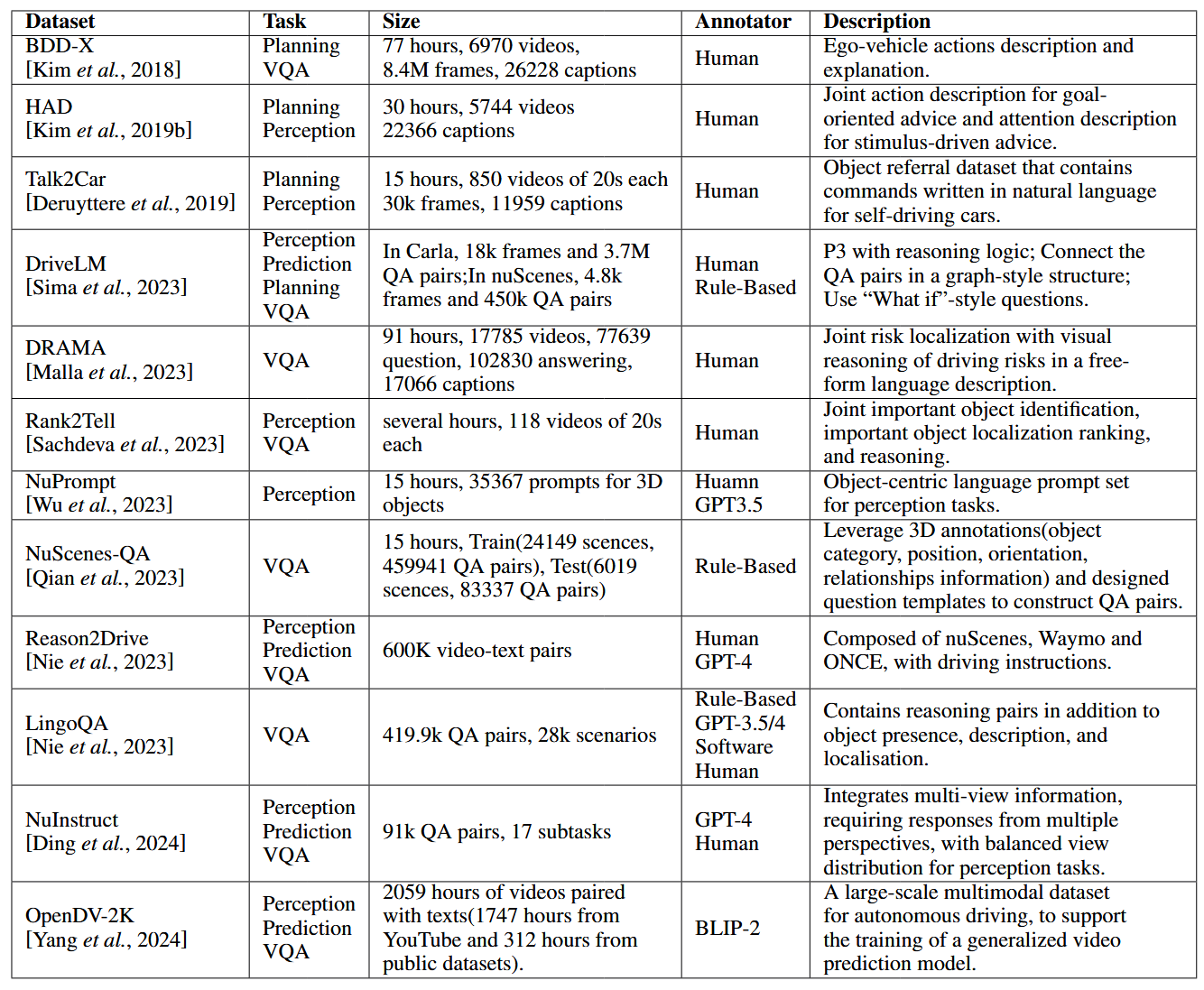
论文阅读:LLM4Drive: A Survey of Large Language Models for Autonomous Driving
地址:LLM4Drive: A Survey of Large Language Models for Autonomous Driving 摘要翻译 自动驾驶技术作为推动交通和城市出行变革的催化剂,正从基于规则的系统向数据驱动策略转变。传统的模块化系统受限于级联模块间的累积误差和缺乏灵活性的预设规则。…...

Vue 3 + WebSocket 实战:公司通知实时推送功能详解
📢 Vue 3 WebSocket 实战:公司通知实时推送功能详解 📌 收藏 点赞 关注,项目中要用到推送功能时就不怕找不到了! 实时通知是企业系统中常见的功能,比如:管理员发布通知后,所有用户…...