vivado DDS学习
实现DDS通常有两种方式,一种是读取ROM存放的正弦/余弦信号的查表法,另一种是用DDS IP核。这篇学习笔记中,我们要讲解说明的是VIVADO DDS IP核的应用。 目前本篇默认Phase Generator and SIN/COS LUT(DDS)的standard模式,至于其他模式,目前没有研究使用过,没有话语权,以后研究明白再来续写。
一、DDS IP配置
下面的配置说明都是本人参考技术手册加上自己的理解,可能会有误解的地方,追求原汁原味的知识点的话还是去看技术手册。
Configuration Tab
Configuration Options:
1.Phase Generator and SIN/COS LUT
2.Phase Generator only
从配置选项的名字就能够清晰的看出每种选项代表的功能,但是有必要注意的是 Phase Generator and SIN/COS LUT才是DDS。
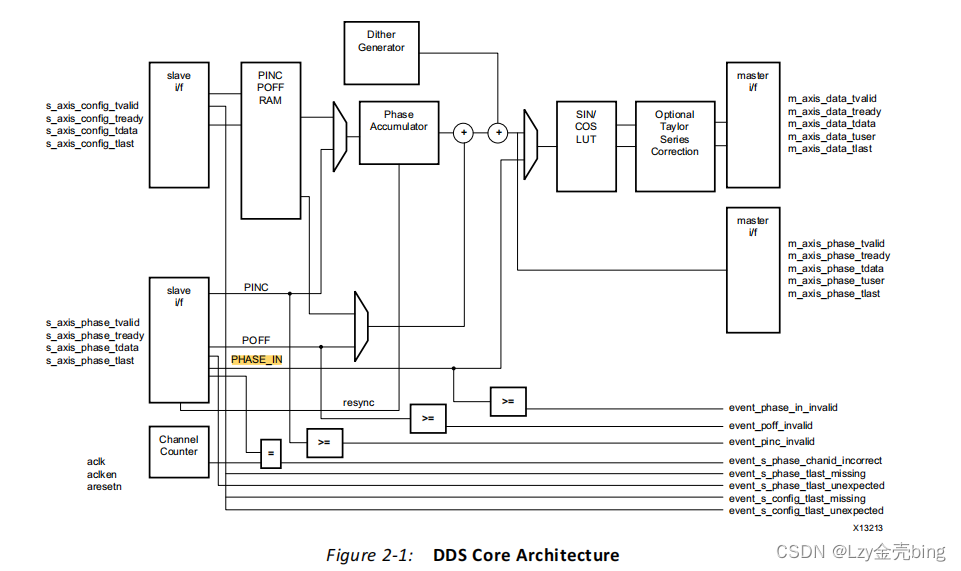
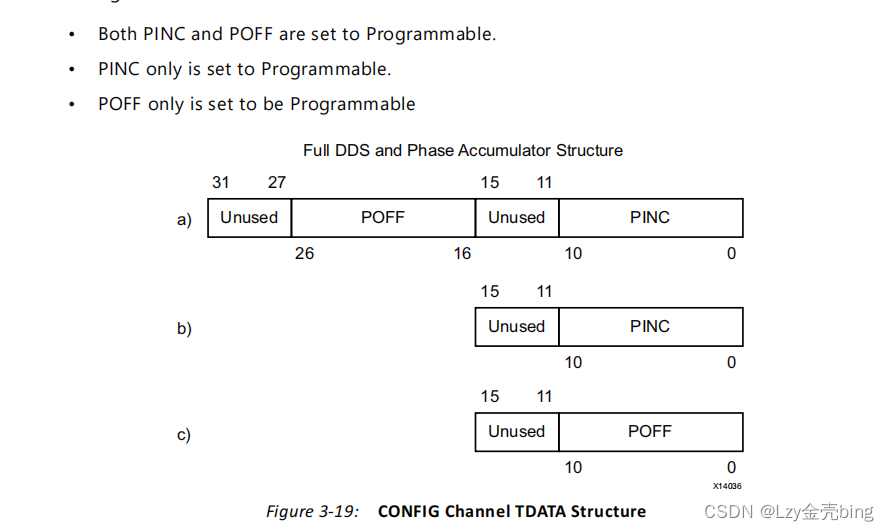
Phase Generator:如上图所示,Phase Generator由一个accumulator和一个可选的adder组成,以提供相位偏移的附加。在制定IP核时,相位增量(PINC)和相位偏移(POFF)可以被配置为fixed、programmable(用config 通道)或者streaming(用phase通道)三种模式。
SIN/COS LUT:当仅配置为SIN/COS LUT,不生成Phase Generator时,PHASE_IN信号通过phase通道输入,并使用look-up table(LUT)转化为sine和cosine信号。IP核可以配置为仅sine输出,仅cosine输出或两者(正交)都输出,每个输出都可以独立配置为反向输出。可使用可选的Taylor series correction(泰勒级数校正)增加精度。
Phase Generator and SIN/COS LUT:Phase Generator与SIN/COS LUT一起使用可以组合成为phase truncated DDS(相位截位DDS)或Taylor series correction DDS(泰勒级数校正DDS),也可以在两个块之间添加一个可选的dither generator组合成phase dithered DDS(相位抖动DDS)。
System Clock:DDS核心的时钟频率。其实就是输出信号的采样率。
Number of Channels:最多支持16个通道,这些通道时间被复用,这降低了每个信道的有效时钟频率。开启多个通道相当于降低采样率。
Mode of Operation:有standard和rasterized两种模式选择。(目前默认讲解standard)
Frequency per Channel (Fs):由于分时复用,每个信道的有效时钟是System clock除以Number of Channels。
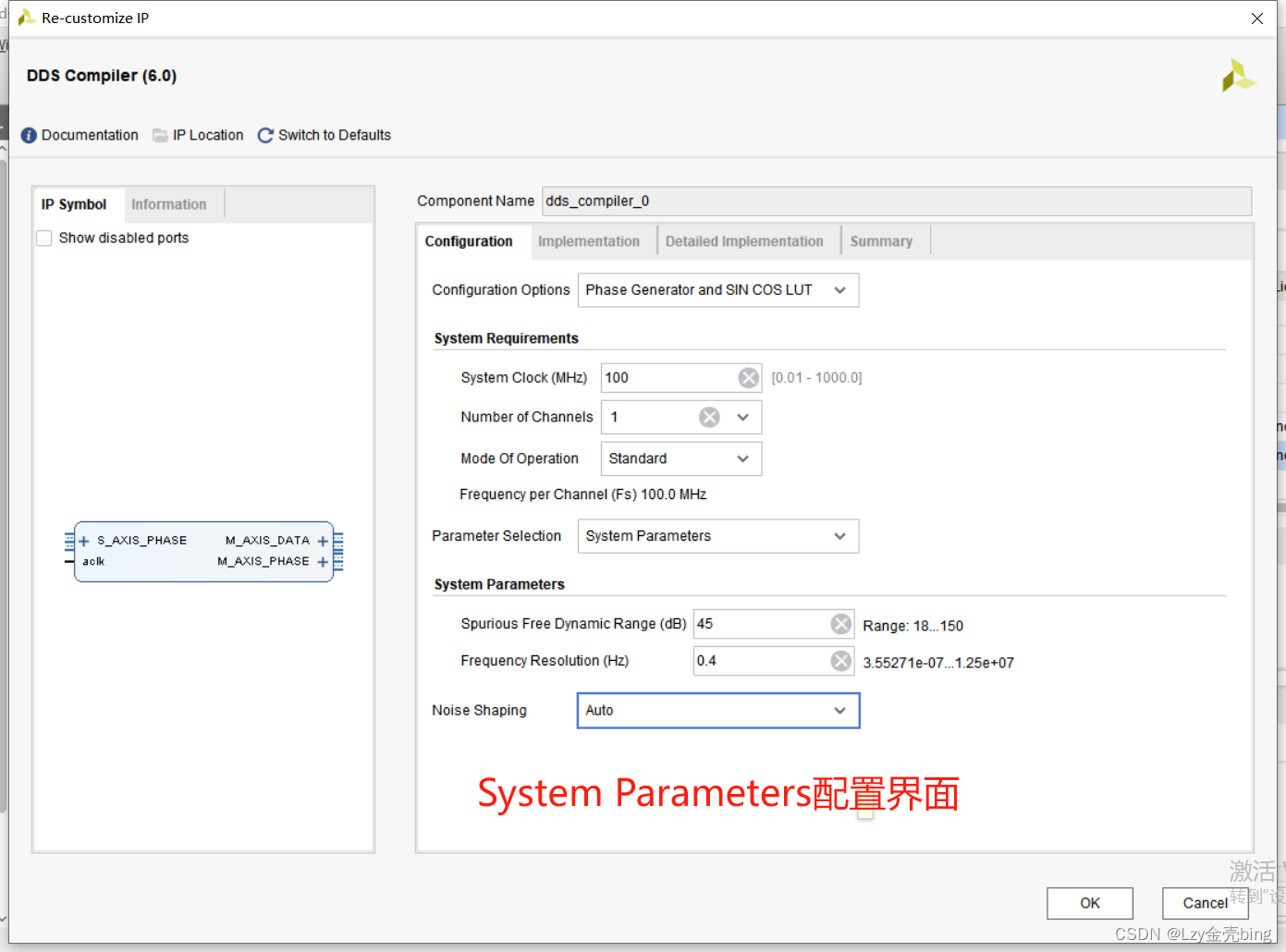
Parameter Selection:DDS关键参数可以使用System parameters来指定,这些参数针对系统架构师(频域参数),也可以使用Hardware parameters,主要针对硬件工程师(时域参数)。这个条件下
Phase Generator和SIN/COS LUT仅根据Hardware parameters指定。
System parameters:如上图System parameters界面,
1.Spurious Free Dynamic Range(SFDR):DDS产生信号的质量,用于设置输出宽度以及内部总线宽度和各种实现决策。
2.Frequency Resolution设置最小频率分辨率,并用于确定相phase accumulator及其相关的相位增量(PINC)和相位偏移(POFF)值所使用的相位宽度(Phase Width)。值越小,分辨率越高,需要更大的累加器。通过选择Noise Shaping可以使Phase Width增加,频率分辨率比指定的更高,
3.Noise Shaping控制是否使用相位截位(phase truncation)、抖动(dithering)或Taylor series correction(泰勒级数校正)。None:Phase truncation DDS。Dithering:相位抖动用于改善SFDR,但代价是增加本底噪声。Taylor Series Corrected:将相位截位中丢弃的bit对Sine/cosine进行插值。Auto:根据SFDR等System parameters自动确定Noise Shaping。
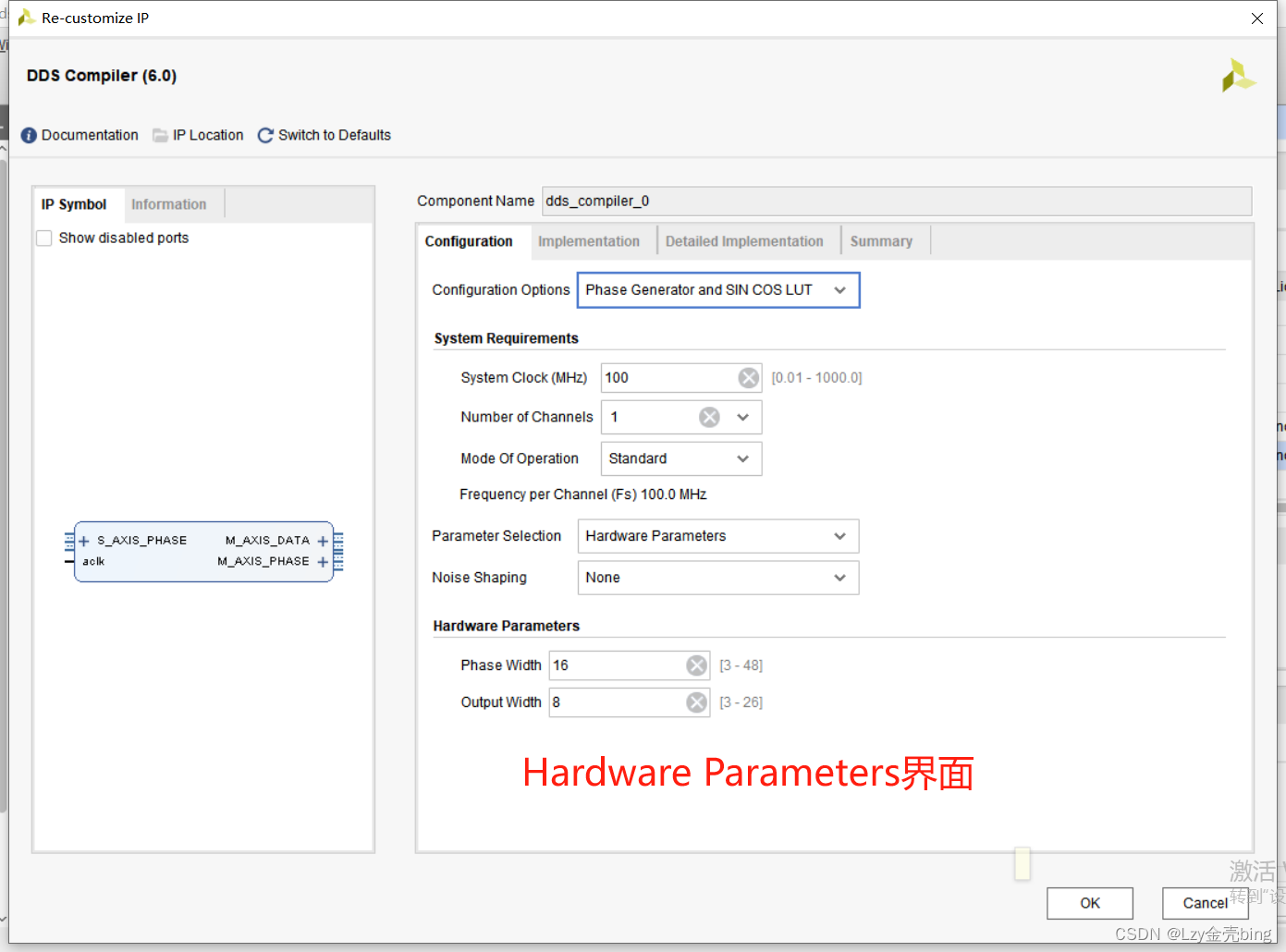
Hardware parameters:如上图Hardware parameters界面。
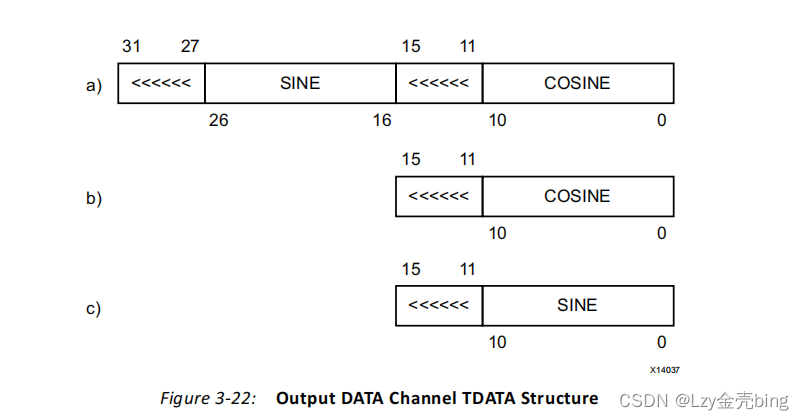
1.Phase Width:设置m_axis_phase_tdata中PHASE_OUT字段的宽度。
2.Output Width:只有在选择DDS或SIN/COS LUT部件时才启用,因为Phase
Generator不需要它,用来设置在m_axis_data_tdata中设置SINE和COSINE字段的宽
度。它提供的SFDR取决于Noise Shaping 的选项,计算方式如图:

Implementation Tab
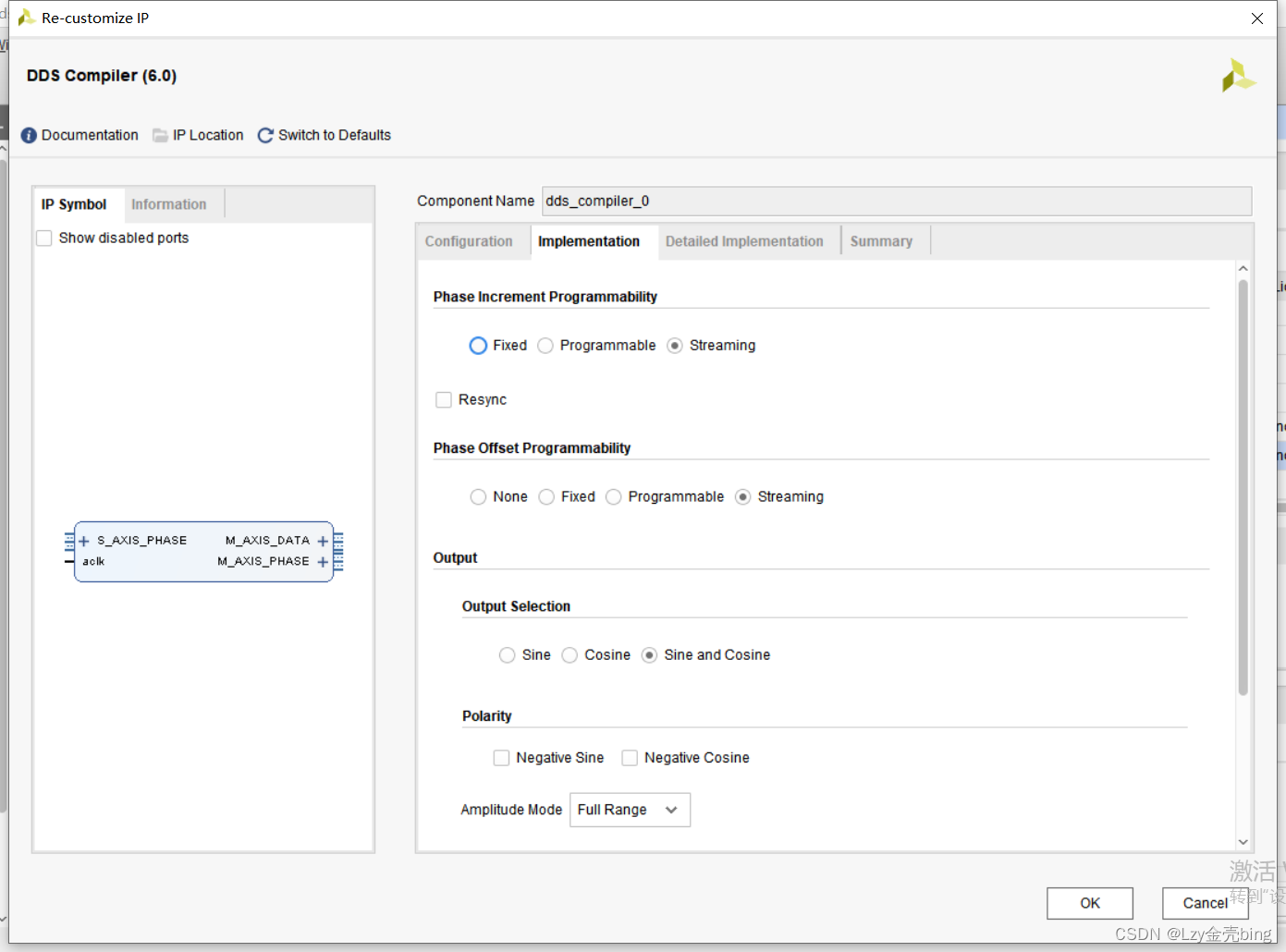
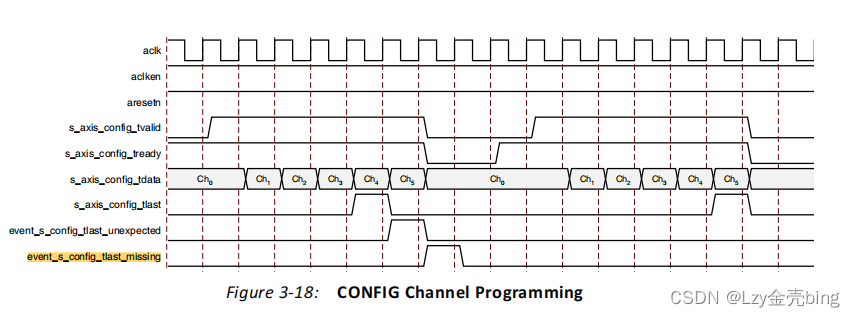
第二个编程周期显示了TLAST的正确应用。

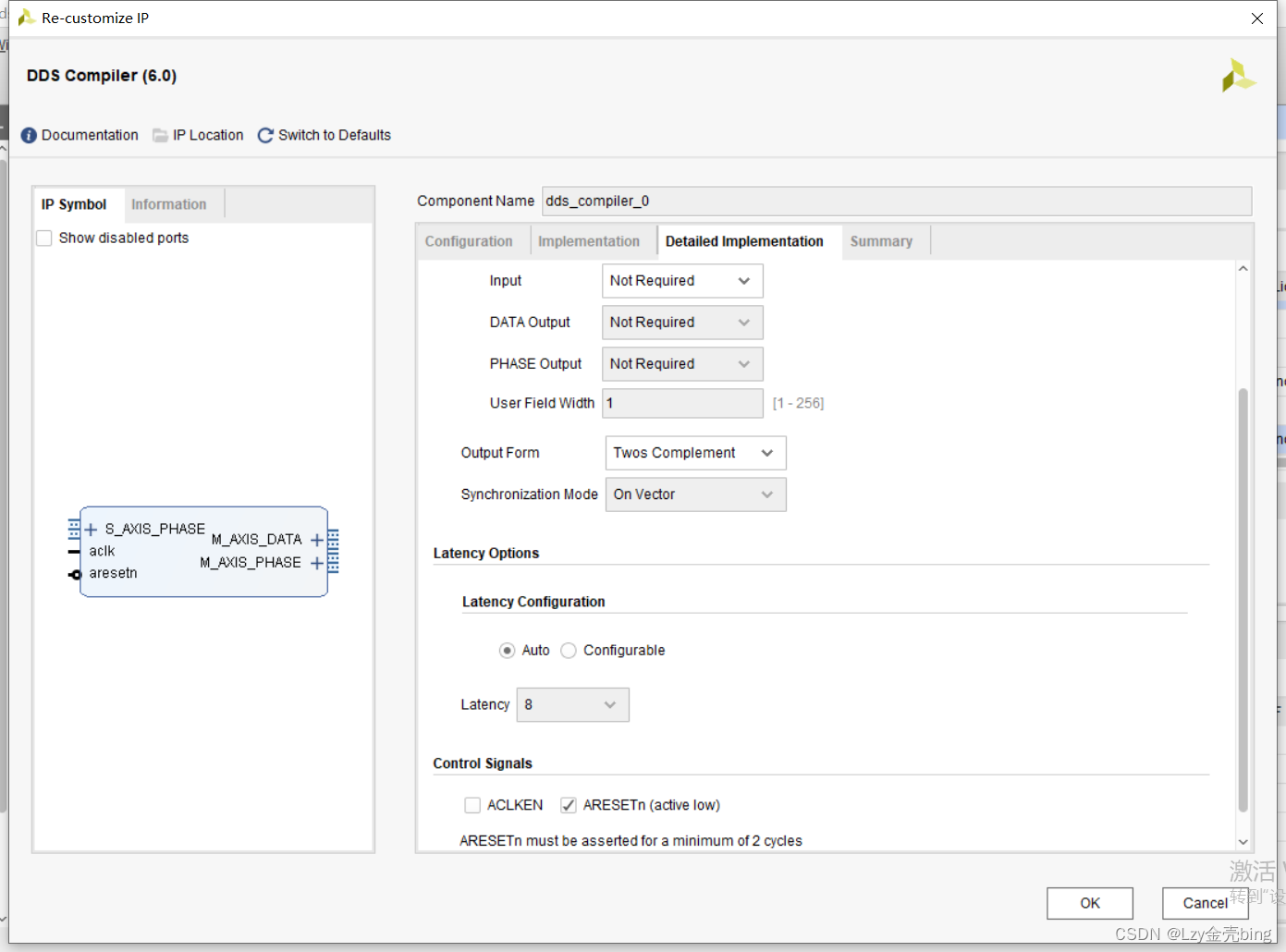
Detailed Implementation Tab
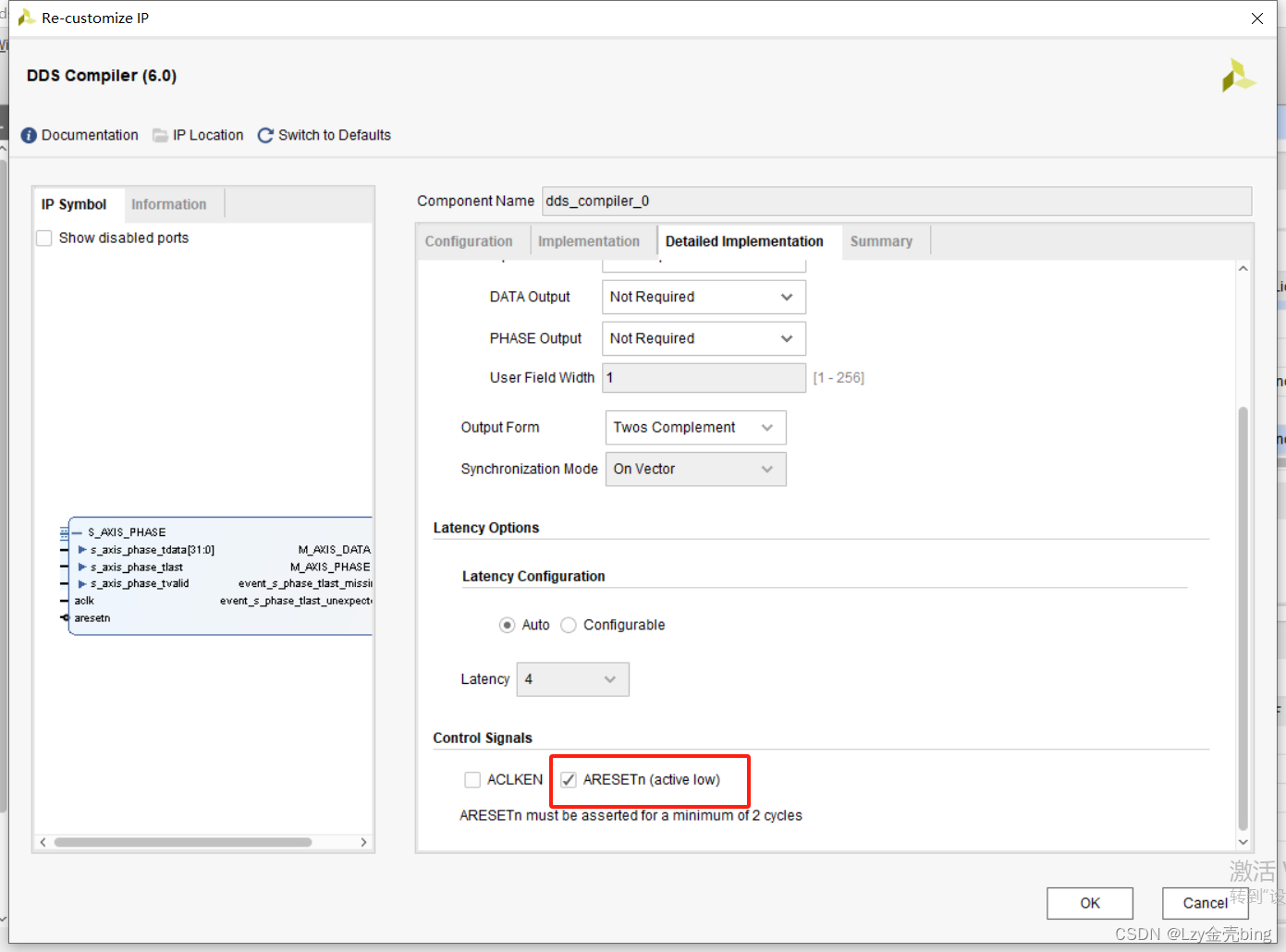
举例:


dds_compiler_0 your_instance_name (.aclk(aclk), // input wire aclk.aresetn(aresetn), // input wire aresetn.s_axis_phase_tvalid(s_axis_phase_tvalid), // input wire s_axis_phase_tvalid.s_axis_phase_tdata(s_axis_phase_tdata), // input wire [63 : 0] s_axis_phase_tdata.m_axis_data_tvalid(m_axis_data_tvalid), // output wire m_axis_data_tvalid.m_axis_data_tdata(m_axis_data_tdata), // output wire [31 : 0] m_axis_data_tdata.m_axis_phase_tvalid(m_axis_phase_tvalid), // output wire m_axis_phase_tvalid.m_axis_phase_tdata(m_axis_phase_tdata) // output wire [31 : 0] m_axis_phase_tdata
);
拓展延申

genvar i;
generatefor(i=0; i<channal; i=i+1)begin:channal_i always @(posedge clk or posedge rst)beginif(rst)beginPINC[i] <= 'h0; POFF[i] <= 'h0; s_axis_phase_tvalid[i] <= 1'b0;end else beginPINC[i] <= PINC_adjust;POFF[i] <= (PINC_adjust/channal)*i; s_axis_phase_tvalid[i] <= 1'b1; endend dds_compiler_0 dds_compiler_0 (.aclk(clk), .aresetn(aresetn), .s_axis_phase_tvalid(s_axis_phase_tvalid[i]), .s_axis_phase_tdata({POFF[i],PINC[i]}), .m_axis_data_tvalid(m_axis_data_tvalid[i]),.m_axis_data_tdata({sine[i],cosine[i]}), .m_axis_phase_tvalid(m_axis_phase_tvalid[i]), .m_axis_phase_tdata(m_axis_phase_tdata[i]) );end
endgenerate相关文章:
vivado DDS学习
实现DDS通常有两种方式,一种是读取ROM存放的正弦/余弦信号的查表法,另一种是用DDS IP核。这篇学习笔记中,我们要讲解说明的是VIVADO DDS IP核的应用。 目前本篇默认Phase Generator and SIN/COS LUT(DDS)的standard模式…...

微信小程序(十六)slot插槽
注释很详细,直接上代码 上一篇 温馨提醒:此篇需要自定义组件的基础,如果不清楚请先看上一篇 新增内容: 1.单个插槽 2.多个插槽 单个插糟 源码: myNav.wxml <view class"navigationBar custom-class">…...

gtest 单元测试
文章目录 前言一、Google Test介绍1.1 gtest源码下载编译1.2 常用API介绍1.3 gtest运行参数介绍 二、Google Mock参考资料 前言 Google Test(简称gtest)是一个开源的C单元测试框架。和常见的测试工具一样,gtest提供了单体测试常见的工具和组…...
掌握assert的使用:断言在错误检查和调试中不可或缺
断言在错误检查和调试中不可或缺 一、简介二、断言的基本语法和用法三、错误检查与断言四、 调试与断言五、避免滥用断言六、总结 一、简介 断言是一种在程序中用于检查特定条件是否满足的工具。一般用于验证开发者的假设,如果条件不成立,就会导致程序报…...
)
概念杂记--到底啥是啥?(数据库篇)
文章目录 1.聚集索引(clustered index)2.非聚集索引(Non-clustered index)3.聚集索引和非聚集索引区别?4.覆盖索引(covering index)5、复合索引 (Composite Index)6.索引…...

Ubuntu20.4 Mono C# gtk 编程习练笔记(四)
连续实时绘图 图看上去不是很清晰,KAZAM录屏AVI尺寸80MB, 转换成gif后10MB, 按CSDN对GIF要求,把它剪裁缩小压缩成了上面的GIF,图像质量大不如原屏AVI,但应该能说明原意:随机数据随时间绘制在 gtk 的 drawin…...

1 月 26日算法练习
文章目录 九宫幻方穿越雷区走迷宫 九宫幻方 小明最近在教邻居家的小朋友小学奥数,而最近正好讲述到了三阶幻方这个部分,三阶幻方指的是将1~9不重复的填入一个33的矩阵当中,使得每一行、每一列和每一条对角线的和都是相同的。 三阶幻方又被称…...
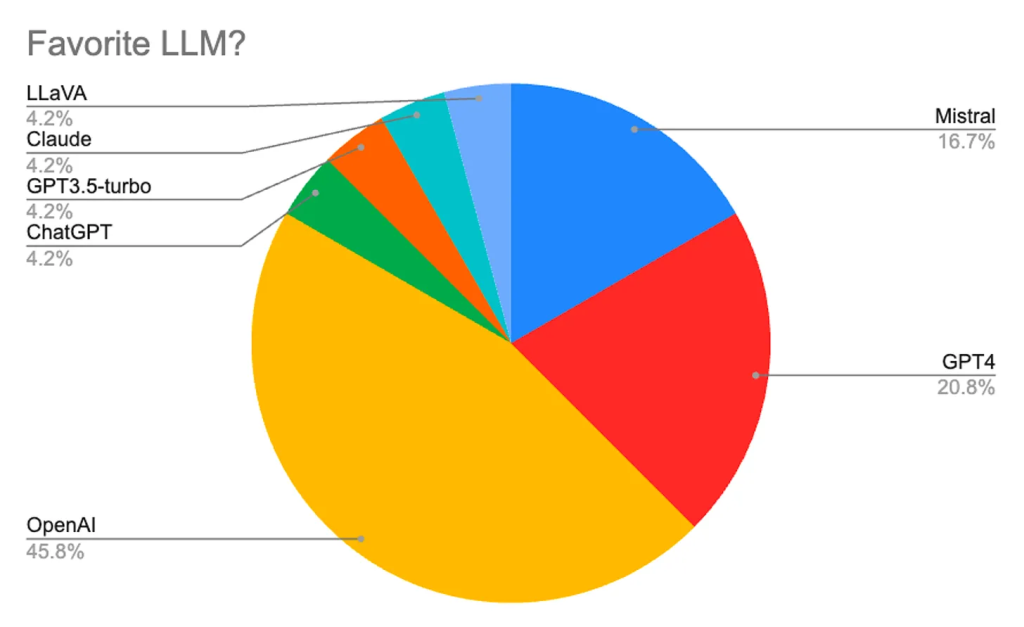
今日AI大热潮,明日智能风向标
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...
03 SB实战 -微头条之首页门户模块(跳转某页面自动展示所有信息+根据hid查询文章全文并用乐观锁修改阅读量)
1.1 自动展示所有信息 需求描述: 进入新闻首页portal/findAllType, 自动返回所有栏目名称和id 接口描述 url地址:portal/findAllTypes 请求方式:get 请求参数:无 响应数据: 成功 {"code":"200","mes…...

Abaqus许可分析工具
在当今的知识产权保护和许可管理领域,一款高效、精准的许可分析工具对于企业来说至关重要。Abaqus许可分析工具凭借其强大的功能和卓越的性能,成为了企业优化知识产权许可管理的得力助手。 一、Abaqus许可分析工具的核心优势 1.全面性:Abaqus…...

【开发工具】从eclipse到idea的过度
背景 随着eclipse相比以前性能慢了不少,idea在开发工具领域越战越猛,市场份额也逐年增加,其体验得了软件工程师的热爱。 概要 本文只是做了一个简要的记录,简单描述下本人从eclipse到idea的过度的心态。 正文 在大厂都会研发自…...
【QT+QGIS跨平台编译】之十一:【libzip+Qt跨平台编译】(一套代码、一套框架,跨平台编译)
文章目录 一、libzip介绍二、文件下载三、文件分析四、pro文件五、编译实践一、libzip介绍 libzip是一个开源C库,用于读取,创建和修改zip文件。 libzip可以从数据缓冲区,文件或直接从其他zip归档文件直接复制的压缩数据中添加文件。在不关闭存档的情况下所做的更改可以还原…...

openlayers+vue实现缓冲区
文章目录 前言一、准备二、初始化地图1、创建一个地图容器2、引入必须的类库3、地图初始化4、给地图增加底图 三、创建缓冲区1、引入需要的工具类库2、绘制方法 四、完整代码总结 前言 缓冲区是地理空间目标的一种影响范围或服务范围,是对选中的一组或一类地图要素(点、线或面…...
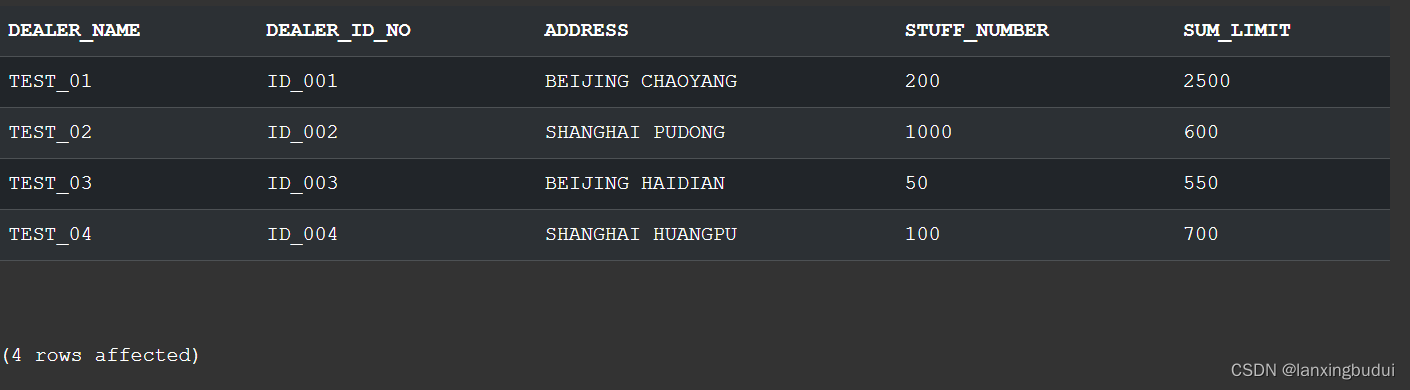
(大众金融)SQL server面试题(3)-客户已用额度总和
今天,面试了一家公司,什么也不说先来三道面试题做做,第三题。 那么,我们就开始做题吧,谁叫我们是打工人呢。 题目是这样的: DEALER_INFO经销商授信协议号码经销商名称经销商证件号注册地址员工人数信息维…...

c语言笔记
1. c语言部分算法列举 1.1 找数 二分查找(前提是数据必须有序) 1.2 求极值 1.3 数组逆序 1.4 排序法(***重点***) 1.4.1 选择排序法 1.4.2 冒泡排序法 1.4.3 插入排序法 2. 字符型数组 2.1 使用格式 char s[10]; …...
6轴机器人运动正解-逆解控制【1】——三种控制位姿的方式
概览: 通过运动学正解控制机器人运动通过运动学逆解控制机器人运动一个简单的物体搬运(沿轨迹运动) 后续会陆续更新(本例仅供学习交流用) 一、6轴机器人 二、运动正解控制 通过修改各个轴的角度,实现末…...

c# Microsoft UI Automation
Microsoft UI Automation(UIA)是一种用于自动化Windows应用程序用户界面(UI)的框架。它允许开发人员编写自动化测试脚本、辅助技术应用程序和其他需要与应用程序交互的工具。以下是一些关于Microsoft UI Automation的重要信息&…...

C#-前后端分离连接mysql数据库封装接口
C#是世界上最好的语言 新建项目 如下图所示选择框红的项目 然后新建 文件夹 Common 并新建类文件 名字任意 文件内容如下 因为要连接的是mysql数据库 所以需要安装 MySql.Data.MySqlClient 依赖; using MySql.Data.MySqlClient; using System.Data;namespace WebApplication1.…...

yolov8 opencv dnn部署自己的模型
源码地址 本人使用的opencv c github代码,代码作者非本人 使用github源码结合自己导出的onnx模型推理自己的视频 推理条件 windows 10 Visual Studio 2019 Nvidia GeForce GTX 1070 opencv4.7.0 (opencv4.5.5在别的地方看到不支持yolov8的推理,所以只使用opencv…...
插槽(64-67)
文章目录 插槽1.插槽 - 默认插槽(组件内可以定制一处结构)2.插槽 - 后备内容(默认值)3.插槽 - 具名插槽(组件内可以定制多处结构)4.作用域插槽(插槽的一个传参语法) 插槽 插槽分类:默认插槽和具名插槽 1.插槽 - 默认插槽(组件内可以定制一处结构) 作用…...

推荐系统工程师必看:如何高效追踪RecSys/KDD/SIGIR顶会论文中的工业落地技术?
推荐系统工程师必看:如何高效追踪RecSys/KDD/SIGIR顶会论文中的工业落地技术? 在算法驱动的互联网时代,推荐系统工程师的竞争力不仅在于代码能力,更在于对技术前沿的敏锐嗅觉。每年RecSys、KDD、SIGIR三大顶会产出的上千篇论文中&…...
)
【愚公系列】《剪映+DeepSeek+即梦:短视频制作》020-声音:让短视频更加动听(音频素材处理)
💎【行业认证权威头衔】 ✔ 华为云天团核心成员:特约编辑/云享专家/开发者专家/产品云测专家 ✔ 开发者社区全满贯:CSDN博客&商业化双料专家/阿里云签约作者/腾讯云内容共创官/掘金&亚马逊&51CTO顶级博主 ✔ 技术生态共建先锋&am…...

Nunchaku FLUX.1 CustomV3效果展示:多角色互动场景中姿态/光影/透视一致性保障
Nunchaku FLUX.1 CustomV3效果展示:多角色互动场景中姿态/光影/透视一致性保障 1. 引言:当AI绘画遇上复杂场景 你有没有试过让AI画一张多个人物互动的图?比如两个人在咖啡馆聊天,或者一群朋友在公园里野餐。结果常常让人哭笑不得…...

OpenClaw配置优化指南:提升GLM-4.7-Flash任务执行稳定性
OpenClaw配置优化指南:提升GLM-4.7-Flash任务执行稳定性 1. 问题背景与挑战 去年冬天,当我第一次尝试用OpenClaw对接GLM-4.7-Flash模型完成自动化文档整理任务时,遇到了令人头疼的问题——任务执行到一半突然中断,控制台只留下一…...

我试了试用 SQL查 Linux日志,好用到飞起
最近发现点好玩的工具,迫不及待的想跟大家分享一下。大家平时都怎么查Linux日志呢?像我平时会用tail、head、cat、sed、more、less这些经典系统命令,或者awk这类三方数据过滤工具,配合起来查询效率很高。但在使用过程中有一点让我…...

Grbl CNC固件终极配置指南:从零到精通的完整教程
Grbl CNC固件终极配置指南:从零到精通的完整教程 【免费下载链接】grbl grbl: 一个高性能、低成本的CNC运动控制固件,适用于Arduino,支持多种G代码命令,适用于CNC铣削。 项目地址: https://gitcode.com/gh_mirrors/grb/grbl …...

BilibiliDown音频高效解决方案:从无损提取到批量管理的全流程指南
BilibiliDown音频高效解决方案:从无损提取到批量管理的全流程指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/g…...

从入门到实战:Python 在网络安全领域的全栈应用指南
Python 在网络安全领域扮演着极其重要的角色——它语法简洁、生态丰富,能快速将想法转化为工具。无论是渗透测试、漏洞研究、安全自动化,还是逆向工程与取证,Python 都是安全从业者的“瑞士军刀”。下面我将从应用领域、常用库、学习路径和实…...

SGLang-v0.5.6环境安全手册:利用快照功能,构建稳定AI开发工作流
SGLang-v0.5.6环境安全手册:利用快照功能,构建稳定AI开发工作流 你有没有过这样的经历?花了大半天时间,终于把SGLang环境配置好,模型也加载成功了,正准备大展拳脚做几个有趣的推理实验。结果因为一个手滑&…...

PreMo库:Arduino差速机器人纯追踪虚拟路径跟随实现
1. PreMo-Virtual Path Following 库技术解析:面向差速驱动机器人的纯追踪虚拟路径跟随实现1.1 库定位与工程价值PreMo(PreciseMovement)库是专为Arduino平台设计的嵌入式运动控制中间件,其核心目标并非替代底层电机驱动或PID闭环…...