工程(十一)——NUC11+D435i+VINS-FUSION+ESDF建图(github代码)
博主的合并代码
git@github.com:huashu996/VINS-FUSION-ESDFmap.git
一、D435i深度相机配置
1.1 SDK+ROS
参考我之前的博客,步骤和所遇见的问题已经写的很详细了
https://blog.csdn.net/HUASHUDEYANJING/article/details/129323834?spm=1001.2014.3001.5501
1.2 相机标定参数
1、相机内参
通过rostopic的camera/info获取
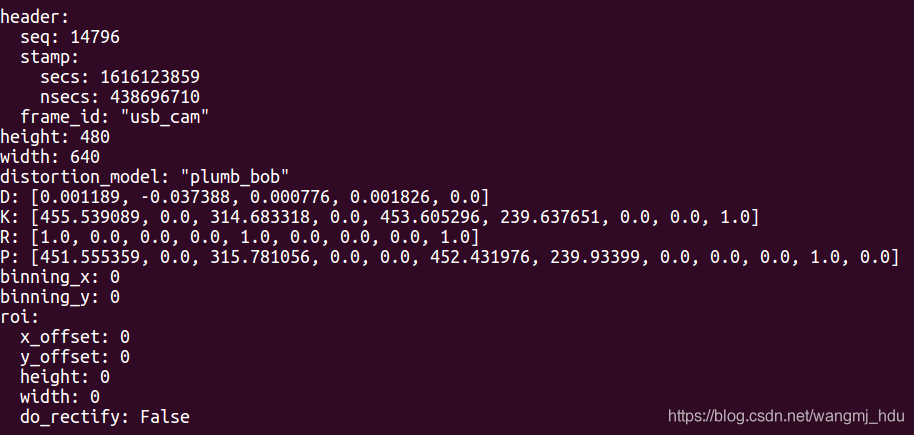
header:标准消息头
seq:序列ID,连续递增的ID号
stamp:两个时间戳
frame_id:与此数据相关联的帧ID
height:图像尺寸,height代表高度,(height*width)相机的分辨率,以像素为单位
width:图像尺寸,width代表宽度,(height*width)相机分辨率,以像素为单位
distortion_model:指定了相机畸变模型,对于大多数相机,"plumb_bob"简单的径向和切向畸变模型就足够了
D(distortion_parameters):畸变参数也叫失真系数,取决于畸变模型,(k1, k2, t1, t2, k3)
K:相机内参矩阵,使用焦距(fx, fy)和主点坐标(cx, cy),单位为像素,内参矩阵可以将相机坐标中的3D点投影到2D像素坐标,数据顺序(fx,cx,fy,cy,1)
R:旋转矩阵,将相机坐标系统对准理想的立体图像平面,使两张立体图像中的极线平行,仅对双目相机有效
P:投影矩阵,左边3*3矩阵是相机的内参矩阵,将相机坐标中的3D点投影到2D像素坐标,可能与相机内参K不同。对于单目相机Tx = Ty = 0。对于双目相机,Tx和Ty有所不同。
binning_x:图像下采样参数,水平方向
binning_y:图像下采样参数,竖直方向
(width / binning_x) x (height / binning_y)
下采样:binning_x = binning_y > 1。缩小图像,生成对应图像的缩略图,使得图像符合显示区域的大小。
roi:感兴趣区域定义,即完整图像上的一个矩形子窗口
2.相机外参标定
https://blog.csdn.net/qq_38364548/article/details/124917067
二、VINS-FUSION环境配置
2.1 重要环境配置如下
ubuntu18.04
ROS
pcl 1.7
opencv3
ceres-solver-1.14.0
整体环境配置还算简单要求不严格,间要说明以下。
ROS
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport ros-melodic-octomap*Ceres
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags-dev libgoogle-glog-dev libeigen3-dev libgtest-dev
git clone https://github.com/ceres-solver/ceres-solver.git
cd ceres-solver/
mkdir build
cd build
cmake ..
make
sudo make install代码安装
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash三、实际测试运行
3.1 D435I launch修改
为了启动IMU,双目摄像头
<launch><arg name="serial_no" default=""/><arg name="usb_port_id" default=""/><arg name="device_type" default=""/><arg name="json_file_path" default=""/><arg name="camera" default="camera"/><arg name="tf_prefix" default="$(arg camera)"/><arg name="external_manager" default="false"/><arg name="manager" default="realsense2_camera_manager"/><arg name="fisheye_width" default="640"/><arg name="fisheye_height" default="480"/><arg name="enable_fisheye" default="false"/><arg name="depth_width" default="640"/><arg name="depth_height" default="480"/><arg name="enable_depth" default="true"/><arg name="infra_width" default="640"/><arg name="infra_height" default="480"/><arg name="enable_infra1" default="true"/><arg name="enable_infra2" default="true"/><arg name="color_width" default="640"/><arg name="color_height" default="480"/><arg name="enable_color" default="true"/><arg name="fisheye_fps" default="30"/><arg name="depth_fps" default="30"/><arg name="infra_fps" default="30"/><arg name="color_fps" default="30"/><arg name="gyro_fps" default="200"/><arg name="accel_fps" default="250"/><arg name="enable_gyro" default="true"/><arg name="enable_accel" default="true"/><arg name="enable_pointcloud" default="false"/><arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/><arg name="pointcloud_texture_index" default="0"/><arg name="enable_sync" default="true"/><arg name="align_depth" default="true"/><arg name="publish_tf" default="true"/><arg name="tf_publish_rate" default="0"/><arg name="filters" default=""/><arg name="clip_distance" default="-2"/><arg name="linear_accel_cov" default="0.01"/><arg name="initial_reset" default="false"/><arg name="unite_imu_method" default="linear_interpolation"/><arg name="topic_odom_in" default="odom_in"/><arg name="calib_odom_file" default=""/><arg name="publish_odom_tf" default="true"/><arg name="allow_no_texture_points" default="false"/><arg name="emitter_enable" default="false"/><!-- rosparam set /camera/stereo_module/emitter_enabled false -->
<rosparam>/camera/stereo_module/emitter_enabled: 0
</rosparam><rosparam if="$(arg emitter_enable)">/camera/stereo_module/emitter_enabled: 1
</rosparam><group ns="$(arg camera)"><include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml"><arg name="tf_prefix" value="$(arg tf_prefix)"/><arg name="external_manager" value="$(arg external_manager)"/><arg name="manager" value="$(arg manager)"/><arg name="serial_no" value="$(arg serial_no)"/><arg name="usb_port_id" value="$(arg usb_port_id)"/><arg name="device_type" value="$(arg device_type)"/><arg name="json_file_path" value="$(arg json_file_path)"/><arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/><arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/><arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/><arg name="enable_sync" value="$(arg enable_sync)"/><arg name="align_depth" value="$(arg align_depth)"/><arg name="fisheye_width" value="$(arg fisheye_width)"/><arg name="fisheye_height" value="$(arg fisheye_height)"/><arg name="enable_fisheye" value="$(arg enable_fisheye)"/><arg name="depth_width" value="$(arg depth_width)"/><arg name="depth_height" value="$(arg depth_height)"/><arg name="enable_depth" value="$(arg enable_depth)"/><arg name="color_width" value="$(arg color_width)"/><arg name="color_height" value="$(arg color_height)"/><arg name="enable_color" value="$(arg enable_color)"/><arg name="infra_width" value="$(arg infra_width)"/><arg name="infra_height" value="$(arg infra_height)"/><arg name="enable_infra1" value="$(arg enable_infra1)"/><arg name="enable_infra2" value="$(arg enable_infra2)"/><arg name="fisheye_fps" value="$(arg fisheye_fps)"/><arg name="depth_fps" value="$(arg depth_fps)"/><arg name="infra_fps" value="$(arg infra_fps)"/><arg name="color_fps" value="$(arg color_fps)"/><arg name="gyro_fps" value="$(arg gyro_fps)"/><arg name="accel_fps" value="$(arg accel_fps)"/><arg name="enable_gyro" value="$(arg enable_gyro)"/><arg name="enable_accel" value="$(arg enable_accel)"/><arg name="publish_tf" value="$(arg publish_tf)"/><arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/><arg name="filters" value="$(arg filters)"/><arg name="clip_distance" value="$(arg clip_distance)"/><arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/><arg name="initial_reset" value="$(arg initial_reset)"/><arg name="unite_imu_method" value="$(arg unite_imu_method)"/><arg name="topic_odom_in" value="$(arg topic_odom_in)"/><arg name="calib_odom_file" value="$(arg calib_odom_file)"/><arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/><arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/></include></group>
</launch>3.2 单目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_d435i_config.yaml
主要修改相机的外参矩阵、内参矩阵、topic,不修改也能运行,漂移大。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_d435i_config.yaml3.1 双目+IMU
修改配置文件VINS-FUSION/src/VINS-Fusion-RGBD/config/realsense/realsense_stereo_imu_config.yaml
主要修改两个相机的外参矩阵、内参矩阵、topic。
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml四、ESDF建图
4.1 下载代码编译
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/FIESTA
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash4.2 修改代码
1.修改launch
<launch><node pkg="fiesta" type="test_fiesta" name="fiesta" output="screen"required="true"><param name="resolution" value="0.05"/><param name="update_esdf_every_n_sec" value="0.1"/><!--Hash Table only--><param name="reserved_size" value="1000000"/><!--Array only--><param name="lx" value="-10.0"/><param name="ly" value="-10.0"/><param name="lz" value="-1"/><param name="rx" value="+10.0"/><param name="ry" value="+10.0"/><param name="rz" value="+3"/><!-- raycasting parameters --><param name="min_ray_length" value="0.5"/><param name="max_ray_length" value="5.0"/><!--If hash table is used, make sure the value is 0. In array implementation, 0 means no other thread.--><param name="ray_cast_num_thread" value="0"/><!-- needed when using depth image--><param name="center_x" value="381.91"/><param name="center_y" value="241.553"/><param name="focal_x" value="609.738"/><param name="focal_y" value="608.557"/><!-- probabilistic grid map --><param name="p_hit" value="0.70"/><param name="p_miss" value="0.35"/><param name="p_min" value="0.12"/><param name="p_max" value="0.97"/><param name="p_occ" value="0.80"/><!-- global / local --><param name="global_map" value="true"/><param name="global_update" value="true"/><param name="global_vis" value="true"/><param name="radius_x" value="3.0"/><param name="radius_y" value="3.0"/><param name="radius_z" value="1.5"/><!--depth_filter --><param name="use_depth_filter" value="true"/><param name="depth_filter_tolerance" value="0.1"/><param name="depth_filter_max_dist" value="10.0"/><param name="depth_filter_min_dist" value="0.1"/><!--unit: pixel--><param name="depth_filter_margin" value="0"/><!-- visulization --><!--0 for no visulize--><param name="visualize_every_n_updates" value="10"/><param name="slice_vis_max_dist" value="2.0"/><!-- relative to the lz if array is used, relative to the origin if hash table is used --><param name="slice_vis_level" value="1.6"/><param name="vis_lower_bound" value="0"/><param name="vis_upper_bound" value="+10"/><!-- subsribe source --><remap from="~depth" to="/camera/depth/image_rect_raw"/><remap from="~transform" to="/vins_estimator/camera_pose"/></node><node name="rvizvisualisation" pkg="rviz" type="rviz" output="log" args="-d $(find fiesta)/demo.rviz" />
</launch>2.修改主函数
FIESTA-master/src/FIESTA/test/test_fiesta.cpp,默认是点云输入格式。
#include "Fiesta.h"int main(int argc, char **argv) {ros::init(argc, argv, "FIESTA");ros::NodeHandle node("~");//fiesta::Fiesta<sensor_msgs::PointCloud2::ConstPtr, geometry_msgs::TransformStamped::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);fiesta::Fiesta<sensor_msgs::Image::ConstPtr, nav_msgs::Odometry::ConstPtr> esdf_map(node);ros::spin();return 0;
}4.3 运行
roslaunch fiesta D435i.launch运行效果图
双目
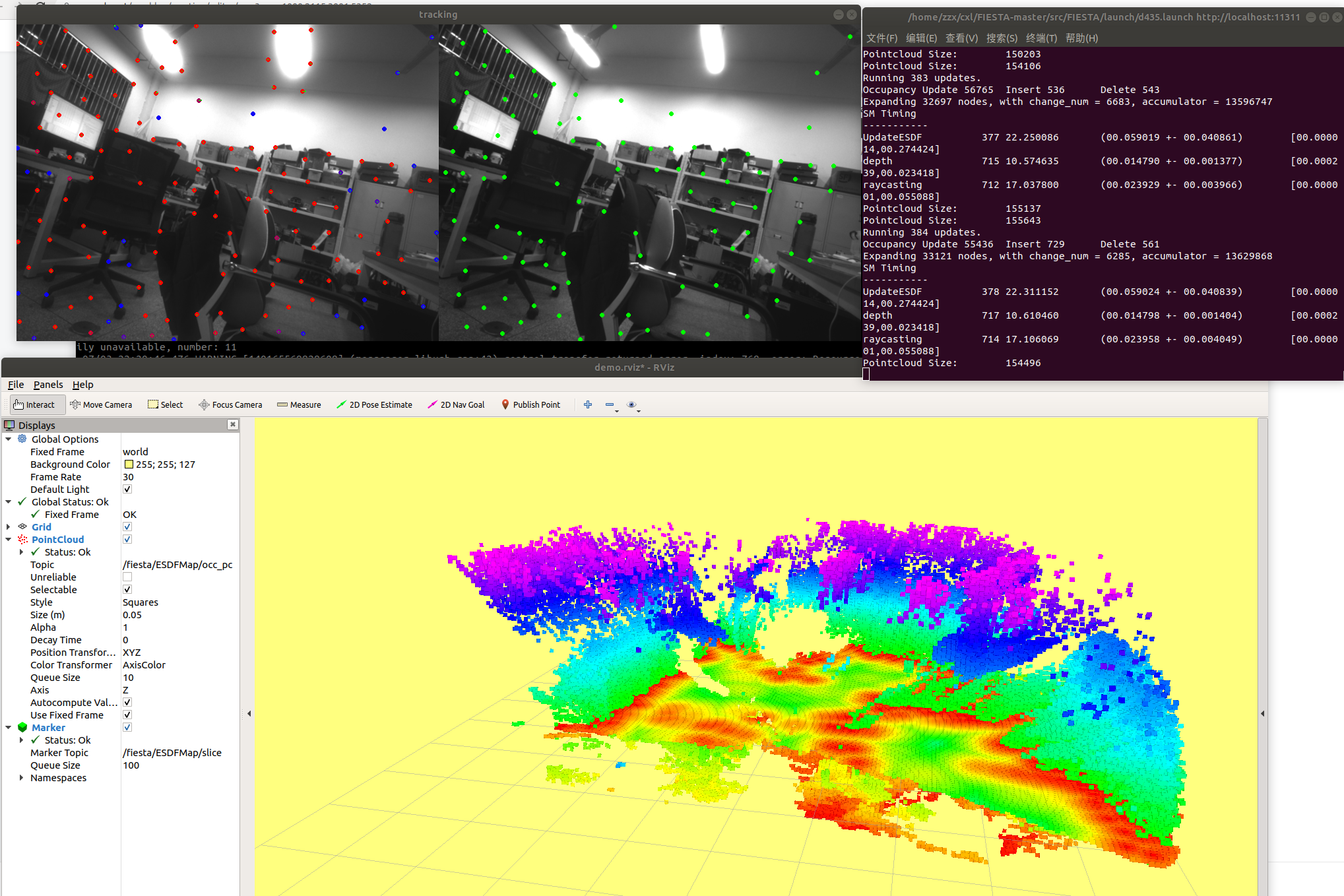
单目

相关文章:
工程(十一)——NUC11+D435i+VINS-FUSION+ESDF建图(github代码)
博主的合并代码gitgithub.com:huashu996/VINS-FUSION-ESDFmap.git一、D435i深度相机配置1.1 SDKROS参考我之前的博客,步骤和所遇见的问题已经写的很详细了https://blog.csdn.net/HUASHUDEYANJING/article/details/129323834?spm1001.2014.3001.55011.2 相机标定参数…...

第十四届蓝桥杯三月真题刷题训练——第 4 天
目录 题目 1 :九数算式_dfs回溯(全排列) 题目描述 运行限制 代码: 题目2:完全平方数 问题描述 输入格式 输出格式 样例输入 1 样例输出 1 样例输入 2 样例输出 2 评测用例规模与约定 运行限制 代码: 题目 1 &am…...

Hadoop 运行环境搭建(开发重点)
文章目录Hadoop 运行环境搭建(开发重点)一、安装JDK二、安装配置 Hadoop1、安装 hadoop2、hadoop 目录结构3、设置免密登录4、完全分布式模式(开发重点)1)分发jdk2)集群配置(1) 集群部署规划(2) 配置文件说…...

在社交媒体上行之有效的个人IP趋势
如果您认为无论是获得一份工作、建立一家企业还是推动个人职业发展,社交媒体都是帮助您实现目标的可靠工具,那么个人IP就是推动这一工具前进的燃料。个人IP反映了您是谁,您在所处领域的专业程度,以及您与他人的区别。社交媒体将有…...

Java网络编程
网络编程 什么是网络编程? 可以让设备中的程序与网络上其他设备中的程序进行数据交互(实现网络通信) Java.net. 包下提供了网络编程的解决方案* 基本的通信架构 基本的通信架构有两种方式:CS架构(Client客户端/Se…...
)
PTA:L1-001 Hello World、L1-002 打印沙漏、L1-003 个位数统计(C++)
目录 L1-001 Hello World 问题描述: 实现代码: L1-002 打印沙漏 问题描述: 实现代码: 原理思路: L1-003 个位数统计 题目描述: 实现代码: 原理思路: 过于简单的就不再写题…...

构造HTTP请求
使用formform使用如下:<body><!-- 表单标签,允许用户和服务器之间交互数据 --><form action"https://www.sogou.com" method"get"><!-- 要求提交的数据以键值对的结构来组织 --><input type"text" name"stduent…...
转速/线速度/角速度计算FC
工业应用中很多设备控制离不开转速、线速度的计算,这篇博客给大家汇总整理。张力控制的开环闭环方法中也离不开转速和线速度的计算,详细内容请参看下面的文章链接: PLC张力控制(开环闭环算法分析)_plc的收卷张力控制系统_RXXW_Dor的博客-CSDN博客里工业控制张力控制无处不…...

学习笔记:Java并发编程(补)ThreadLocal
【尚硅谷】学习视频:https://www.bilibili.com/video/BV1ar4y1x727【黑马程序员】学习视频:https://www.bilibili.com/video/BV15b4y117RJ 参考书籍 《实战 JAVA 高并发程序设计》 葛一鸣 著《深入理解 JAVA 虚拟机 | JVM 高级特性与最佳实践》 周志明 著…...

HashMap底层实现原理及面试题
文章目录1. 常见的数据结构有三种结构1.1 各自数据结构的特点2. HashMap2.1 概述2.2 底层结构2.2.1 HashMa实现原理:2.2.1.1 map.put(k,v)实现原理2.2.1.2 map.get(k)实现原理2.2.1.3 resize源码2.2.2 HashMap常用的变量2.2.3 HashMap构造函数2.3 JDK1.8之前存在的问…...
:DMA+ADC实现模拟量检测)
【STM32】进阶(二):DMA+ADC实现模拟量检测
1、简述 DMA:Direct Memory Access,直接内存访问 ADC:Analog to Digital Converter,模数转换器,模拟信号转换成数字信号的电路(采样-量化-编码) 参考博客: STM32DMA功能详解 STM32…...
Lab2_Simple Shell_2020
Lab2: 实验目的:给xv6添加新的系统调用 并理解系统调用是如何工作的,并理解xv6内核的一些内部特征 实验准备: 阅读xv6的第2章以及第4章的4.3,4.3小节熟悉下面的源码 用户态相关的代码:user/user.h和user/usys.pl内核态相关的代…...
2023最全电商API接口 高并发请求 实时数据 支持定制 电商数据 买家卖家数据
电商日常运营很容易理解,就是店铺商品维护,上下架,评价维护,库存数量,协助美工完成制作详情页。店铺DSR,好评率,提升客服服务等等,这些基础而且每天都必须做循环做的工作。借助电商A…...

MySQL 的索引类型
1. 按照功能划分 按照功能来划分,索引主要有四种: 普通索引唯一性索引主键索引全文索引 普通索引就是最最基础的索引,这种索引没有任何的约束作用,它存在的主要意义就是提高查询效率。 普通索引创建方式如下: CREATE…...

< Linux > 进程信号
目录 1、信号入门 生活角度的信号 技术应用角度的信号 前台进程 && 后台进程 信号概念 用kill -l命令察看系统定义的信号列表 信号处理的方式 2、信号产生前 用户层产生信号的方式 3、产生信号 3.1、通过终端按键产生信号 3.2、核心转储core dump 3.3、调用系统函数…...

Pyspark基础入门7_RDD的内核调度
Pyspark 注:大家觉得博客好的话,别忘了点赞收藏呀,本人每周都会更新关于人工智能和大数据相关的内容,内容多为原创,Python Java Scala SQL 代码,CV NLP 推荐系统等,Spark Flink Kafka Hbase Hi…...

C/C++每日一练(20230307)
目录 1. 国名排序 ★★ 2. 重复的DNA序列 ★★★ 3. 买卖股票的最佳时机 III ★★★ 🌟 每日一练刷题专栏 C/C 每日一练 专栏 Python 每日一练 专栏 1. 国名排序 小李在准备明天的广交会,明天有来自世界各国的客房跟他们谈生意,…...

一条SQL查询语句是如何执行的?
平时我们使用数据库,看到的通常都是一个整体。比如,你有个最简单的表,表里只有一个ID字段,在执行下面这个查询语句时: mysql> select * from T where ID10; 我们看到的只是输入一条语句,返…...
tcsh常用配置
查看当前的shell类型 在 Linux 的世界中,有着许多 shell 程序。常见的有: Bourne shell (sh) C shell (csh) TC shell (tcsh) Korn shell (ksh) Bourne Again shell (bash) 其中,最常用的就是bash和tcsh,本次文章介绍tcsh的…...
YOLOv5源码逐行超详细注释与解读(2)——推理部分detect.py
前言 前面简单介绍了YOLOv5的项目目录结构(直通车:YOLOv5源码逐行超详细注释与解读(1)——项目目录结构解析),对项目整体有了大致了解。 今天要学习的是detect.py。通常这个文件是用来预测一张图片或者一…...

从API Key管理视角看Taotoken平台的安全与审计功能
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 从API Key管理视角看Taotoken平台的安全与审计功能 对于依赖大模型API进行开发的团队而言,API Key的管理与安全是项目稳…...

AI写文章,你的创作新伙伴
你有没有想过,有一天写文章这件事可以变得像聊天一样轻松?别急着摇头,前阵子我在一个写作论坛里翻到一篇帖子,楼主问大家每天写稿累不累,结果底下好多人分享说,他们现在都靠工具来辅助了。而其中被提到最多…...

机器学习预测细菌耐药性:从全基因组数据到公共卫生预警
1. 项目概述与核心价值抗菌药物耐药性(AMR)这事儿,现在谁提起来都头疼。它不再是实验室报告上的一个数字,而是直接关系到我们每个人生病了还有没有药可用的现实问题。弯曲杆菌,这个听起来有点拗口的名字,其…...

如何让旧电脑联网?安卓手机以太网共享来帮忙!
通过安卓手机以太网共享让旧电脑联网2026 年 5 月 21 日,阅读时长 3 分钟。有人喜欢摆弄 90 年代和 21 世纪初的旧电脑和软件,比如童年时的 Amiga 500 电脑至今仍被保留且让人爱不释手。不过,Windows 9x/XP 时代的计算机使用经历最让人怀念&a…...

5分钟上手G-Helper:彻底告别Armoury Crate臃肿的终极指南
5分钟上手G-Helper:彻底告别Armoury Crate臃肿的终极指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook,…...
(Google drive存储解密密钥,加密聊天记录还是存储在Meta服务器上)聊天加密)
Messenger端到端加密机制(end-to-end encryption)(Google drive存储解密密钥,加密聊天记录还是存储在Meta服务器上)聊天加密
Messenger有个save key in google drive选项,这是什么,是指把聊天记录存于google drive吗?还是只存一个key?只存一个key有啥用啊? 文章目录解释为什么只存 key 就够了?如果没有这个 key 会怎样?…...

技术方案:基于Spring Boot的智能茅台预约系统架构解析
技术方案:基于Spring Boot的智能茅台预约系统架构解析 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://…...

构建 AI Agent Harness Engineering 时常见的十个错误
构建 AI Agent Harness Engineering 时常见的十个错误 | 从翻车案例到生产级落地最佳实践 引入:85%的Agent上线失败,问题都出在「缰绳」上 2024年Q2,国内某股份制银行上线的智能理财顾问Agent,上线仅3天就触发了3起严重合规事故:风险承受能力等级为C1(最低风险等级)的用…...

Construct3新手避坑指南:做完第一个射击游戏后,这5个进阶技巧必须知道
Construct3新手避坑指南:做完第一个射击游戏后,这5个进阶技巧必须知道当你完成第一个Construct3射击游戏时,那种成就感一定很棒。但很快你会发现,基础教程里的游戏显得过于简陋——敌人只会直线移动,爆炸效果像纸片&am…...

解锁iOS设备无限可能:2026最新越狱技术深度解析与实战指南
解锁iOS设备无限可能:2026最新越狱技术深度解析与实战指南 【免费下载链接】Jailbreak iOS 26.4 - 26, 17 - 17.7.5 & iOS 18 - 18.7.3 Jailbreak Tools, Cydia/Sileo/Zebra Tweaks & Jailbreak News Updates || AI Jailbreak Finder 👇 项目地…...