嵌入式算法开发系列之卡尔曼滤波算法
卡尔曼滤波算法
文章目录
- 卡尔曼滤波算法
- 前言
- 一、卡尔曼滤波算法原理
- 二、算法应用
- 三、C语言实现
- 总结
前言
在嵌入式系统中,传感器数据通常受到噪声、误差和不确定性的影响,因此需要一种有效的方法来估计系统的状态。卡尔曼滤波算法是一种基于概率理论的优雅而高效的状态估计方法,广泛应用于导航、机器人、自动控制等领域。今天探讨其在嵌入式系统中的实现应用。
一、卡尔曼滤波算法原理
卡尔曼滤波算法基于状态空间模型,通过递归地预测系统状态和观测状态的联合概率分布,来估计系统的状态。其核心思想是将系统的状态表示为一个高斯分布,并利用线性动态系统和线性观测模型进行状态更新和预测。
卡尔曼滤波算法包括两个主要步骤:预测步骤和更新步骤。
- 预测步骤:根据系统的动态模型和上一时刻的状态估计,预测当前时刻的状态和状态协方差。
- 更新步骤:利用当前时刻的观测值,通过贝叶斯更新规则,将预测的状态和测量信息融合,得到最优的状态估计和状态协方差。
通过不断地迭代预测和更新步骤,可以实现对系统状态的准确估计。
二、算法应用
- 传感器数据融合
- 状态估计
例如,将加速度计和陀螺仪的数据融合,可以实现更准确的姿态估计;
将GPS定位数据与惯性导航数据融合,可以提高导航系统的定位精度。
三、C语言实现
//基于卡尔曼滤波算法的C语言实现示例:
#include <stdio.h>// 卡尔曼滤波结构体
typedef struct {float x; // 状态估计float P; // 状态协方差float Q; // 状态过程噪声方差float R; // 观测噪声方差
} KalmanFilter;// 初始化卡尔曼滤波器
void KalmanFilter_init(KalmanFilter *kf, float Q, float R) {kf->x = 0;kf->P = 1;kf->Q = Q;kf->R = R;
}// 卡尔曼滤波更新步骤
float KalmanFilter_update(KalmanFilter *kf, float z) {// 预测步骤float x_pred = kf->x;float P_pred = kf->P + kf->Q;// 更新步骤float K = P_pred / (P_pred + kf->R);kf->x = x_pred + K * (z - x_pred);kf->P = (1 - K) * P_pred;return kf->x;
}int main() {// 初始化卡尔曼滤波器KalmanFilter kf;KalmanFilter_init(&kf, 0.01, 0.1); // 设置过程噪声方差和观测噪声方差// 模拟测量数据float measurements[] = {1.2, 1.5, 1.8, 2.1, 2.4};int num_measurements = sizeof(measurements) / sizeof(measurements[0]);// 对每个测量值进行卡尔曼滤波for (int i = 0; i < num_measurements; i++) {float filtered_value = KalmanFilter_update(&kf, measurements[i]);printf("Measurement: %.2f, Filtered value: %.2f\n", measurements[i], filtered_value);}return 0;
}
总结
卡尔曼滤波算法作为一种高效的状态估计方法,在传感器数据融合和状态估计等领域有着广泛的应用前景。希望这篇博客对您有所帮助!最后希望大家点点关注,订阅,多多支持张工。你们的支持是我持续更新的动力。
相关文章:

嵌入式算法开发系列之卡尔曼滤波算法
卡尔曼滤波算法 文章目录 卡尔曼滤波算法前言一、卡尔曼滤波算法原理二、算法应用三、C语言实现总结 前言 在嵌入式系统中,传感器数据通常受到噪声、误差和不确定性的影响,因此需要一种有效的方法来估计系统的状态。卡尔曼滤波算法是一种基于概率理论的…...

简述对css工程化的理解
一、css工程化解决了哪些问题 1、宏观设计:css如何组织、拆分、设计模块结构 2、编码优化:如何更好地编写css 3、构建:如何处理css,使打包结果最优 4、可维护性:最小化后续的变更成本 二、针对问题,如何解…...

.NET 5种线程安全集合
在.NET中,有许多种线程安全的集合类,下面介绍五种我们常用的线程安全集合以及他们的基本用法。 ConcurrentBag ConcurrentBag 是一个线程安全的无序包。它适用于在多线程环境中频繁添加和移除元素的情况。 ConcurrentBag<int> concurrentBag n…...
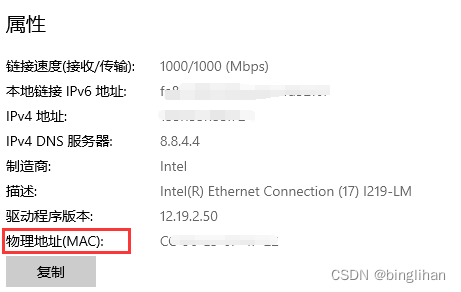
计算机信息自查
文章目录 操作系统安装时间硬盘序列号查询上网IPMAC地址 操作系统安装时间 可以使用命令行形式,查询windows系统安装时间: wmic OS get InstallDate首先显示年份,然后是月份,然后是日期,然后是安装的确切时间 或者w…...

配置vite配置文件更改项目端口、使用@别名
一、配置vite配置文件更改项目端口 vite官方文档地址:开发服务器选项 | Vite 官方中文文档 (vitejs.dev) 使用: 二、使用别名 1. 安装 types/node types/node 包允许您在TypeScript项目中使用Node.js的核心模块和API,并提供了对它们的类型…...

【LeetCode热题100】【链表】环形链表
题目链接:141. 环形链表 - 力扣(LeetCode) 判断一个链表有没有环可以用快慢指针的方法,如果没有环,那么最终可以让两个指针中一个为空,如果有环,那么快指针终会与慢指针相遇 class Solution {…...
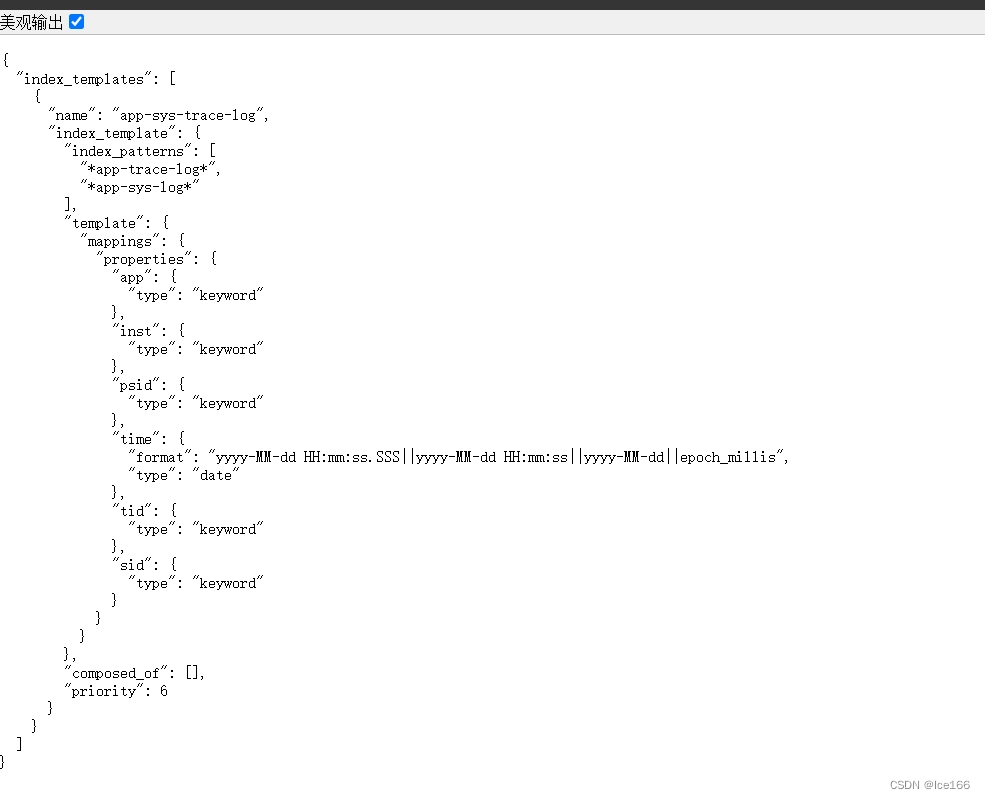
SpringBoot整合ELK8.1.x实现日志中心教程
目录 背景 环境准备 环境安装 1.JDK安装 2.安装Elasticsearch 3.安装zookeeper 4.安装Kafka 5.安装logstash 6.安装file beat 解决方案场景 1.日志采集 1.1 应用日志配置 1.1.1 创建logback-spring.xml文件 1.1.2 创建LoggerFactory 1.1.3 trace日志的记录用法 …...
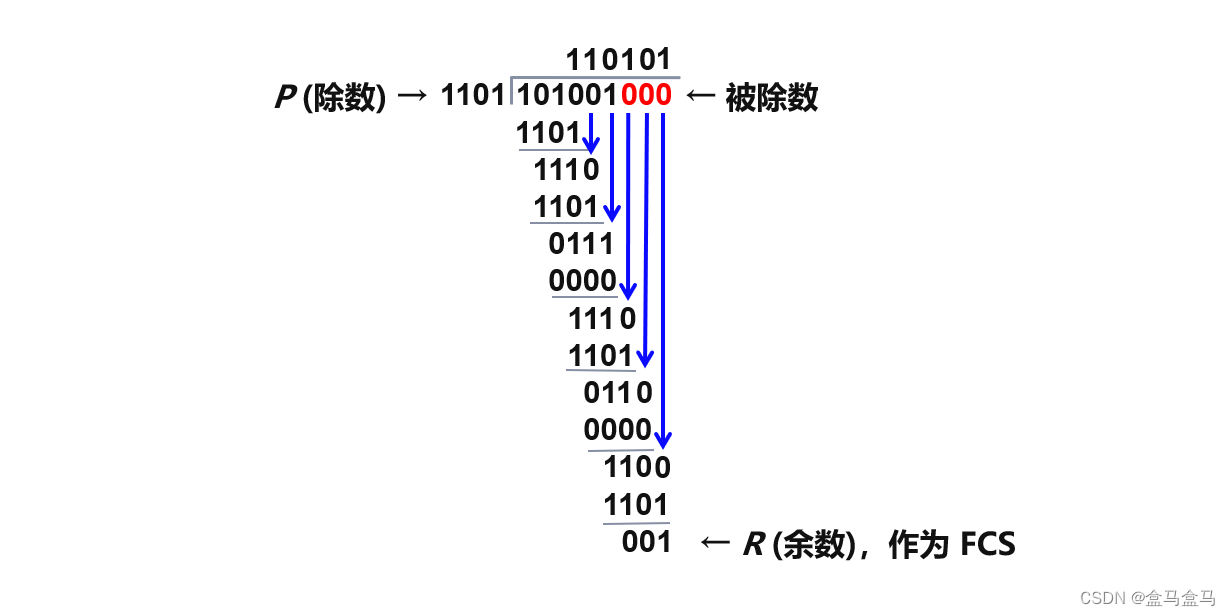
计算机网络:数据链路层 - 封装成帧 透明传输 差错检测
计算机网络:数据链路层 - 封装成帧 & 透明传输 & 差错检测 数据链路层概述封装成帧透明传输差错检测 数据链路层概述 从数据链路层来看,主机 H1 到 H2 的通信可以看成是在四段不同的链路上的通信组成的,所谓链路就是从一个节点到相邻…...

Open3D (C++) 计算点云的特征值特征向量
目录 一、算法原理二、代码实现三、结果展示本文由CSDN点云侠原创,原文链接。如果你不是在点云侠的博客中看到该文章,那么此处便是不要脸的爬虫与GPT。 一、算法原理 针对整个点云 P = { p i } i...
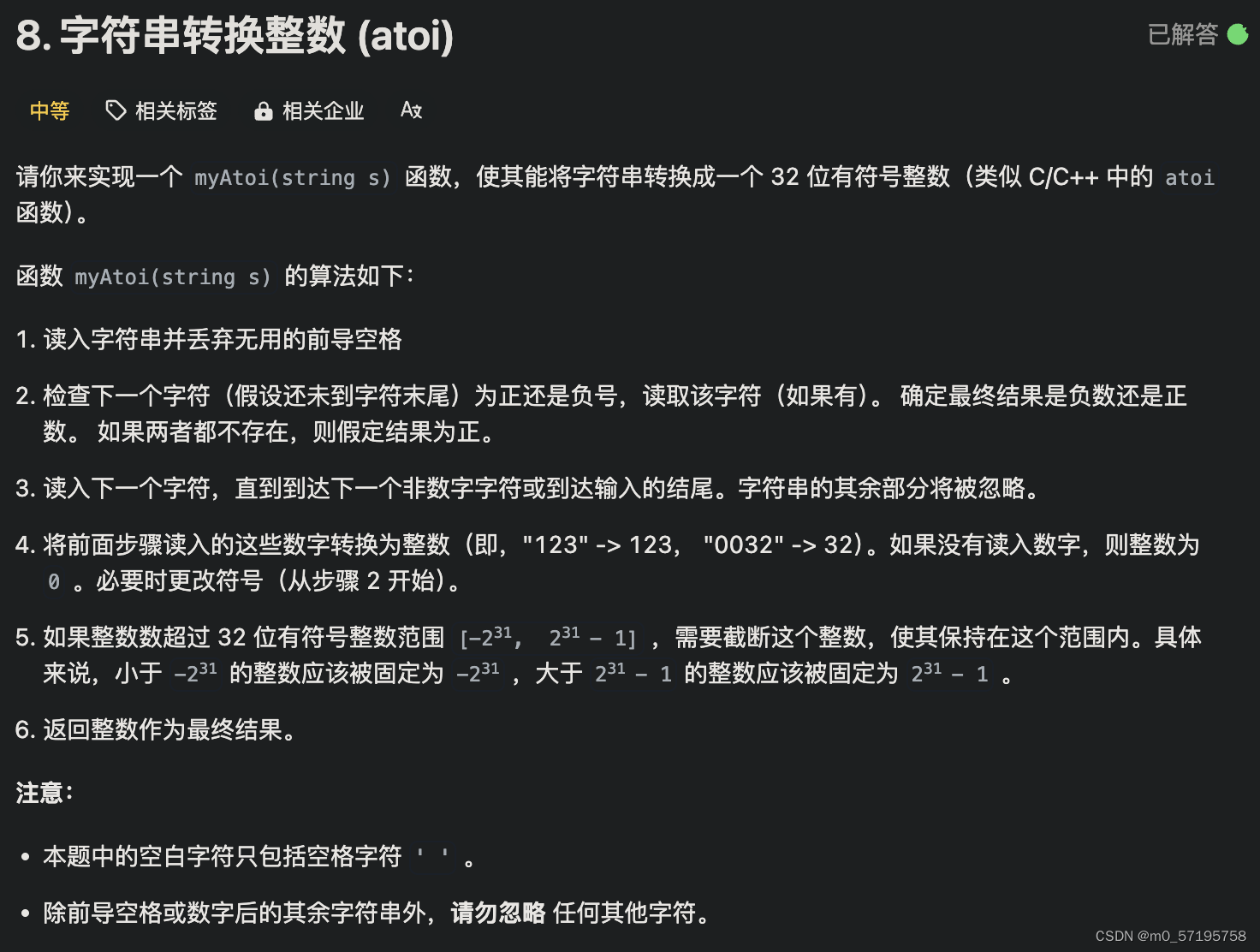
Java | Leetcode Java题解之第8题字符串转换整数atoi
题目: 题解: class Solution {public int myAtoi(String str) {Automaton automaton new Automaton();int length str.length();for (int i 0; i < length; i) {automaton.get(str.charAt(i));}return (int) (automaton.sign * automaton.ans);} …...

BL200耦合器数据采集模块
BL200耦合器数据采集模块是一个数据采集和控制系统,基于强大的32 位ARM926EJ-S™ 微处理器设计,采用Linux操作系统,支持Modbus TCP协议,可以快速接入现场PLC、MES、Ignition和SCADA以及ERP系统,同时也能快速连接到AWS云…...

基于Uni-app的体育场馆预约系统的设计与实现
个人介绍 hello hello~ ,这里是 code袁~💖💖 ,欢迎大家点赞🥳🥳关注💥💥收藏🌹🌹🌹 🦁作者简介:一名喜欢分享和记录学习的…...
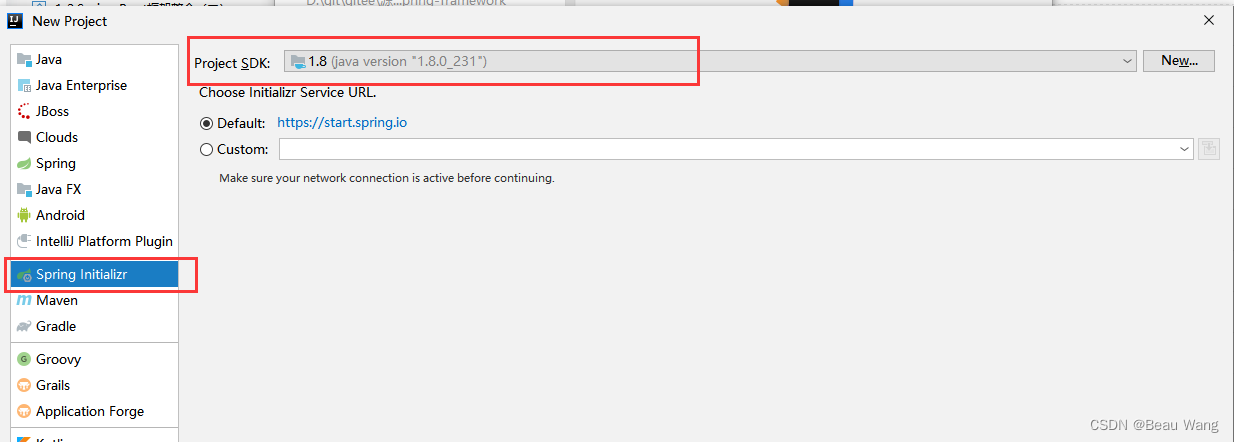
1.Spring Boot框架整合
Spring Boot项目创建(约定大于配置) 2.1.3.RELEASE版本示例 idea创建 从官网下载(https://start.spring.io/)单元测试默认依赖不对时,直接删除即可 Web支持(SpringMVC) <dependency>&…...

如何在 Debian VPS 上添加、删除和授予用户 sudo 权限
简介 当你启动一个新的服务器时,会创建一个名为 root 的默认账户。这个用户拥有完全的系统访问权限,应该仅用于管理任务。作为 root 用户,你基本上可以对系统做任何操作,这很强大,但也极其危险。Linux 没有“撤销”按…...

openlayers 入门教程(九):overlay 篇
还是大剑师兰特:曾是美国某知名大学计算机专业研究生,现为航空航海领域高级前端工程师;CSDN知名博主,GIS领域优质创作者,深耕openlayers、leaflet、mapbox、cesium,canvas,webgl,ech…...

基于Python的高考志愿辅助填报系统
基于Python的高考志愿辅助填报系统是一个利用数据分析和机器学习技术帮助高考生进行志愿填报决策的工具。该系统可以根据考生的分数、兴趣、专业偏好、历史录取数据等因素,为考生提供科学合理的志愿填报建议。以下是设计这样一个系统的步骤和要点。 ### 1. 数据收集…...

使用CMake搭建简单的Qt程序
目录结构 代码 CMakeLists.txt: cmake_minimum_required(VERSION 3.15)set(CMAKE_AUTOUIC ON) set(CMAKE_AUTOMOC ON) set(CMAKE_AUTORCC ON)# set the project name project(xxx)# 设置Qt的路径 # 例如 E:/Qt/Qt/aaa/msvc2019_64 # aaa 为Qt的版本号 set(QT_PATH…...
Qt + VS2017 创建一个简单的图片加载应用程序
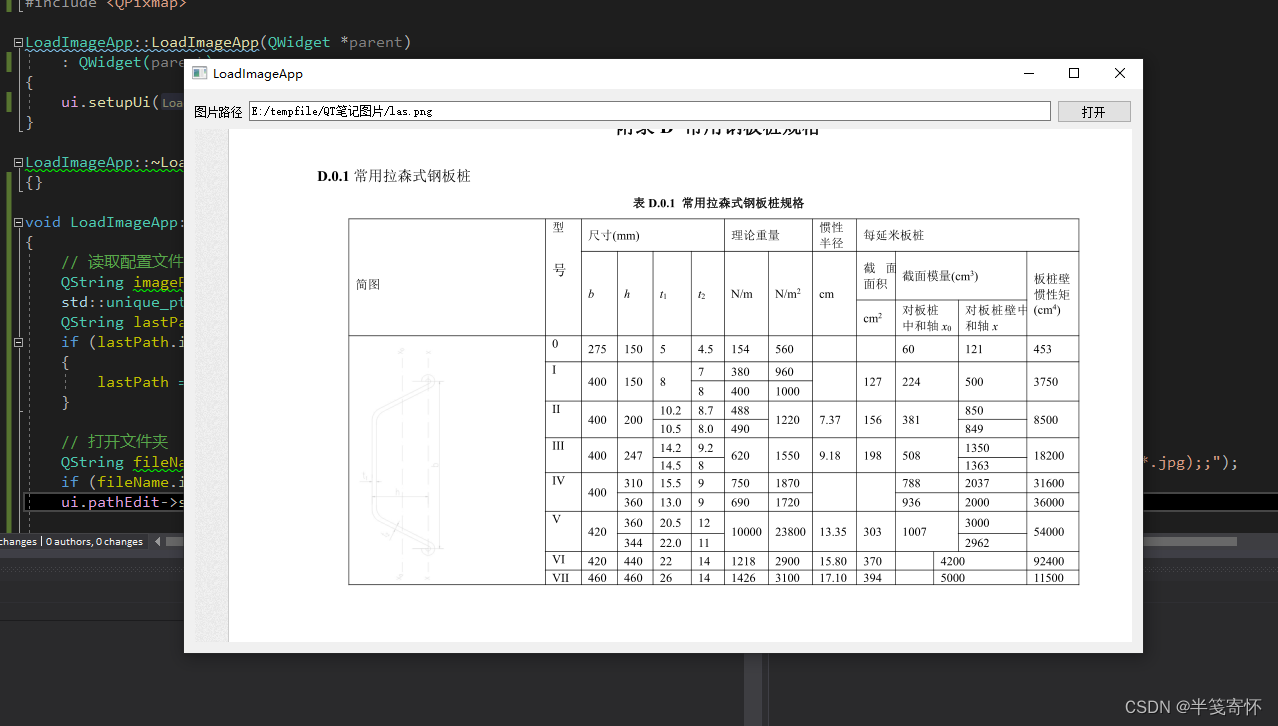
简介: 本文介绍了如何使用Qt创建一个简单的图片加载应用程序。该应用程序可以打开图片文件并在界面上显示选定的图片,并保存用户上次选择的图片路径。 1. 创建项目: 首先,在VS中创建一个新的Qt Widgets应用程序项目,并…...

Linux文件搜索工具(gnome-search-tool)
opensuse下安装: sudo zypper install gnome-search-tool 操作界面:...
c++20协程详解(三)
前言 前面两节我们已经能够实现一个可用的协程框架了。但我们一定还想更深入的了解协程,于是我们就想尝试下能不能co_await一个协程。下面会涉及到部分模板编程的知识,主要包括(模板偏特化,模板参数列表传值,模板函数…...

Mondrian高级应用:参数化查询与动态报表生成实战
Mondrian高级应用:参数化查询与动态报表生成实战 【免费下载链接】mondrian Mondrian is an Online Analytical Processing (OLAP) server that enables business users to analyze large quantities of data in real-time. 项目地址: https://gitcode.com/gh_mir…...

Janus-Pro-7B教育落地:试卷扫描图识别+知识点标注+错题归因
Janus-Pro-7B教育落地:试卷扫描图识别知识点标注错题归因 1. 引言:当AI老师遇上纸质试卷 想象一下这个场景:一位老师批改完一个班级的数学试卷,面对几十份试卷,他需要手动统计每道题的得分情况,分析每个学…...

本地部署千问大模型
下载千问大模型大家可以从魔搭社区平台,下载各种版本的各种大模型,尽量能在自己的电脑上运行,所以这边下载1.5B的版本下载后的文件夹里的东西不要动即可环境准备在开始之前,先统一环境。本文基于transformersPyTorch,支…...

基于ESP32与ESP-NOW的智能门锁系统设计:双模块无线交互与多模态控制详解
基于ESP32与ESP-NOW的智能门锁系统设计:双模块无线交互与多模态控制详解 最近有不少朋友在问,想自己动手做一个智能门锁,但市面上的方案要么太贵,要么功能单一,能不能用ESP32做一个功能全面、成本可控的?正…...

Local Moondream2零基础上手:无Python经验也能玩转本地视觉AI
Local Moondream2零基础上手:无Python经验也能玩转本地视觉AI 让你的电脑真正拥有"眼睛",无需编程基础也能玩转AI视觉对话 1. 开篇:给电脑装上"智能眼睛" 你有没有想过,让电脑像人一样"看懂"图片&…...

Blue Topaz Obsidian主题:打造个性化笔记体验的蓝色美学方案
Blue Topaz Obsidian主题:打造个性化笔记体验的蓝色美学方案 【免费下载链接】Blue-Topaz_Obsidian-css A blue theme for Obsidian. 项目地址: https://gitcode.com/gh_mirrors/bl/Blue-Topaz_Obsidian-css Blue Topaz是Obsidian平台上备受欢迎的蓝色系主题…...

在AspNetCore中理解依赖注入生命周期冲突与解决方案
本文详细讲解AspNetCore依赖注入生命周期冲突问题,通过BackgroundService后台托管服务示例,分析Singleton、Scoped、Transient三种生命周期的区别及注入规则,重点说明为什么Singleton不能直接依赖Scoped服务,以及如何使用IService…...

【实时Linux工业PLC解决方案系列】第三十一篇 - 实时Linux PLC容器化部署实践
一、简介:为什么PLC需要容器化?传统痛点:产线换型时,PLC程序需逐台烧录,停机2小时起。不同项目依赖冲突(库版本、内核模块),"这台能跑,那台报错"。现场调试出差…...
-从“帮我买抽纸”到自动下单支付——大模型驱动全链路自动购物系统实战)
灵机一物AI智能电商小程序(已上线)-从“帮我买抽纸”到自动下单支付——大模型驱动全链路自动购物系统实战
作者:vx:Maris5188摘要:传统电商购物需要用户手动搜索、对比、选规格、下单、支付,操作路径长、决策成本高。本文基于大模型LangGraph状态机Chainlit任务编排,实现一套从自然语言指令到支付完成的端到端自动购物系统。用户只需一句…...

拒绝加班!这套一键生成建筑模型的方法,让甲方当场傻眼
一、概述 在智慧城市建设、城市规划设计、游戏场景搭建以及数字孪生应用等领域,三维建筑模型的构建始终是基础且关键的一环。传统建模方式依赖人工描图、手动拉伸,不仅耗时耗力,而且难以保证数据的现势性与准确性。尤其是面对大范围城市级别…...