STM32感应开关盖垃圾桶
目录
项目需求
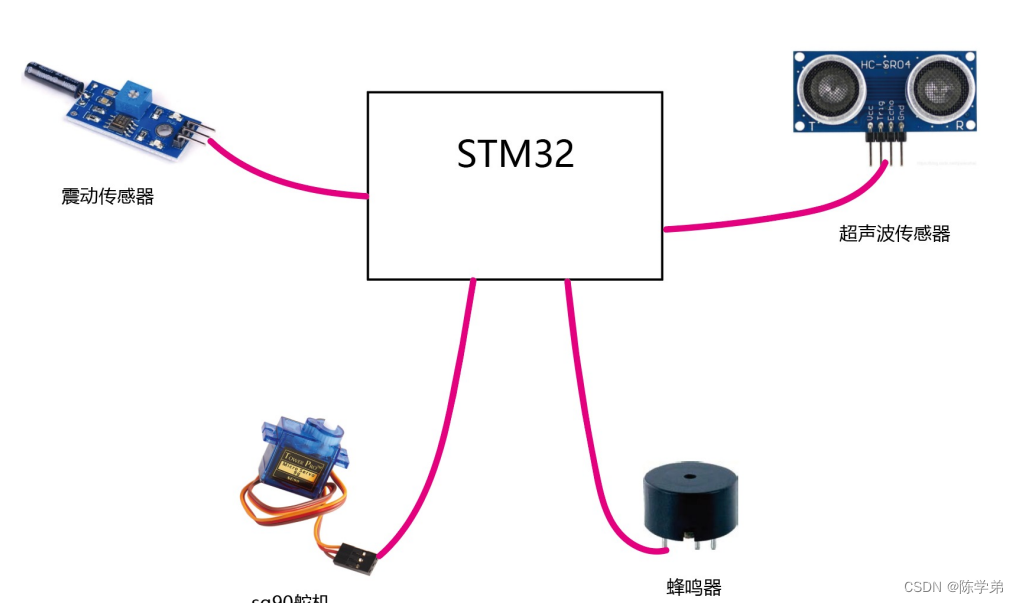
项目框图
编辑
硬件清单
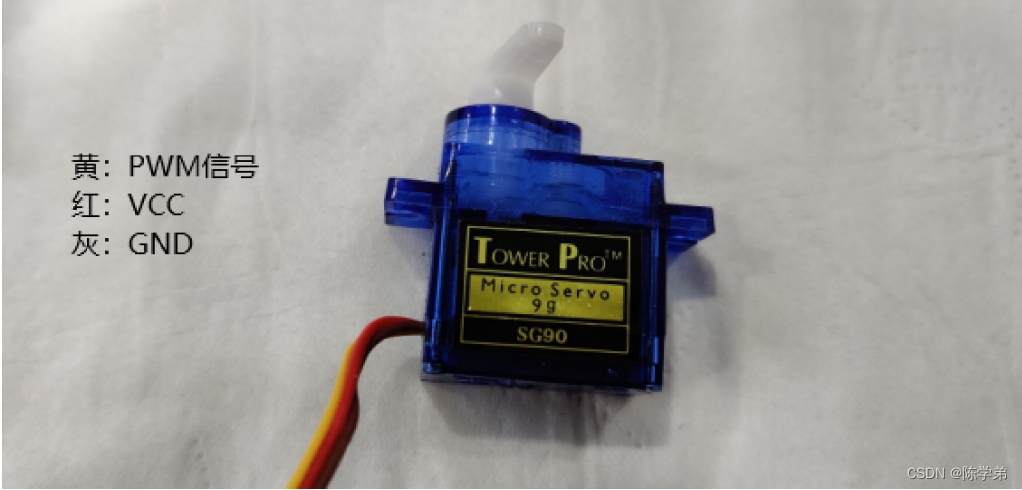
sg90舵机介绍及实战
sg90舵机介绍
角度控制
SG90舵机编程实现
超声波传感器介绍及实战
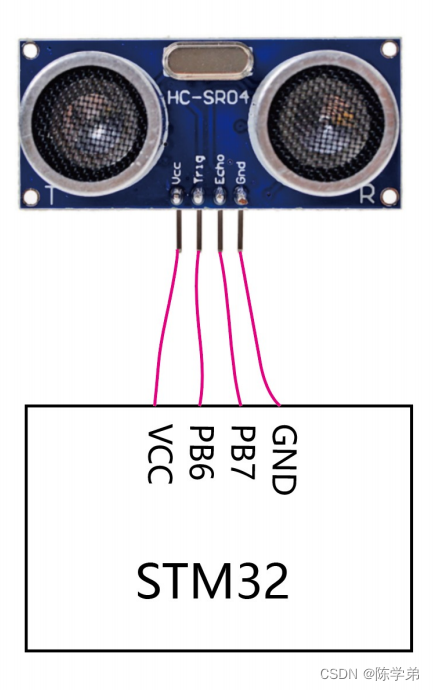
超声波传感器介绍
超声波编程实战
项目设计及实现
项目需求
- 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
- 发生震动时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
- 按下按键时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
项目框图
硬件清单
sg90舵机介绍及实战
sg90舵机介绍
PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右。
确定周期/频率
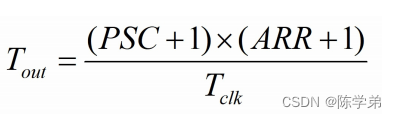
如果周期为20ms,则 PSC=7199,ARR=199
角度控制
- 0.5ms-------------0度; 2.5% 对应函数中CCRx为5
- 1.0ms------------45度; 5.0% 对应函数中CCRx为10
- 1.5ms------------90度; 7.5% 对应函数中CCRx为15
- 2.0ms-----------135度; 10.0% 对应函数中CCRx为20
- 2.5ms-----------180度; 12.5% 对应函数中CCRx为25

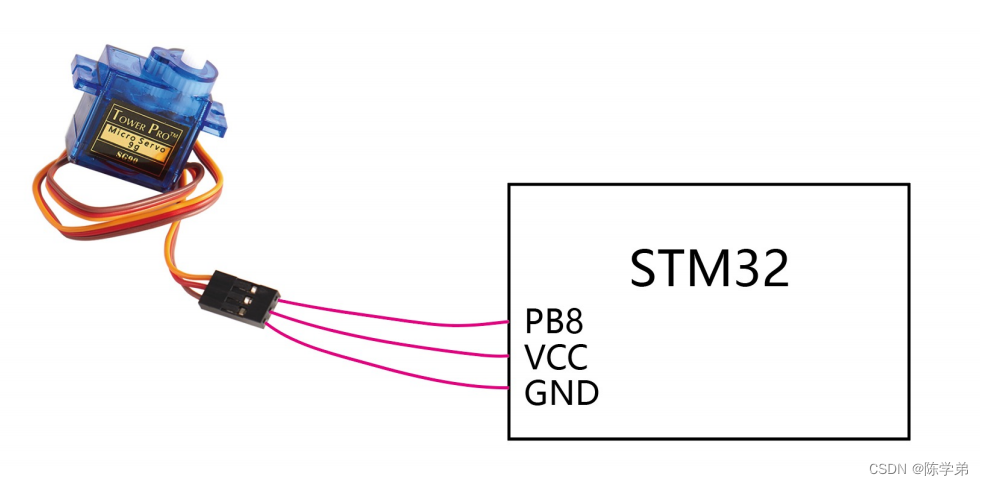
SG90舵机编程实现
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_3);
while (1)
{HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 10);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 15);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20);HAL_Delay(1000);__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 25);
}超声波传感器介绍及实战
超声波传感器介绍

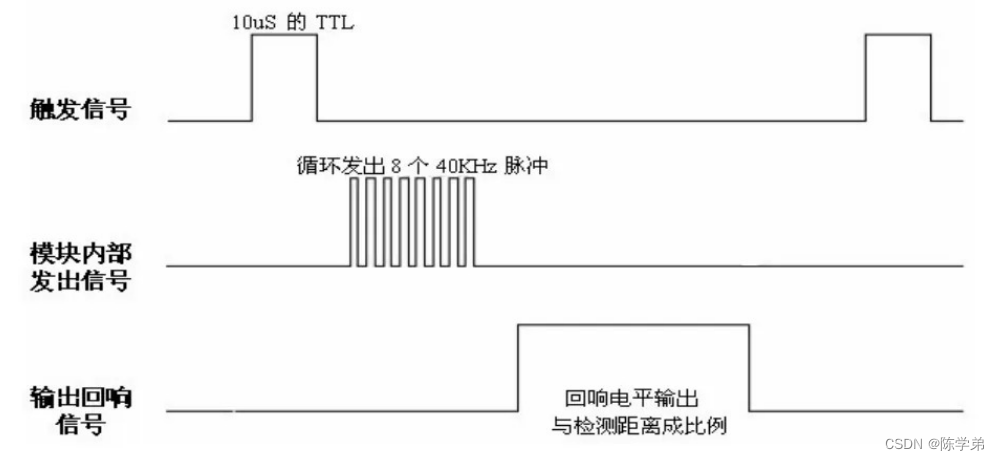
- 怎么让它发送波
Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了
Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波
Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间
Echo引脚维持高电平的时间!
- 波发出去的那一下,开始启动定时器
波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离
距离 = 速度 (340m/s)* 时间/2
超声波编程实战
定时器配置:
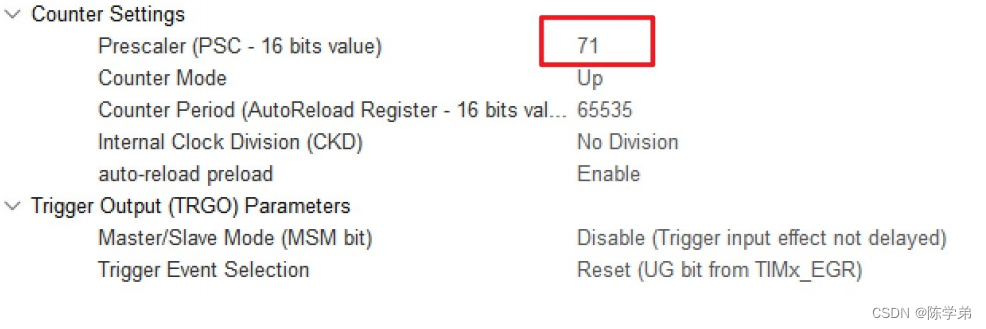
编写微秒级函数:
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{/* 使能定时器2计数 */__HAL_TIM_ENABLE(&htim2);__HAL_TIM_SetCounter(&htim2, 0);while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );/* 关闭定时器2计数 */__HAL_TIM_DISABLE(&htim2);
}主函数:
int cnt;
float distance;
while (1)
{//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)distance = cnt*340/2*0.000001*100; //单位:cmif(distance < 5)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);//每500毫秒测试一次距离HAL_Delay(500);
}项目设计及实现
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2023 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes *//* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define OPEN 1
#define CLOSE 0
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
char flag=CLOSE;
/* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim4;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM4_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 *///使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
double get_distance()
{int cnt;//1. Trig ,给Trig端口至少10us的高电平HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);//拉高TIM2_Delay_us(20);HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);//拉低//2. echo由低电平跳转到高电平,表示开始发送波//波发出去的那一下,开始启动定时器while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_RESET);//等待输入电平拉高HAL_TIM_Base_Start(&htim2);__HAL_TIM_SetCounter(&htim2,0);//3. 由高电平跳转回低电平,表示波回来了while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET);//等待输入电平变低//波回来的那一下,我们开始停止定时器HAL_TIM_Base_Stop(&htim2);//4. 计算出中间经过多少时间cnt = __HAL_TIM_GetCounter(&htim2);//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)return (cnt*340/2*0.000001*100); //单位:cm
}
void openStatusLight()
{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
}
void closeStatusLight()
{HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
}
void initSG90_0()
{HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4);//启动定时器4__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);//将舵机置0°
}
void openDusbin()
{if(flag==CLOSE){flag=OPEN;__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 15);//将舵机置90°HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_RESET);HAL_Delay(100);HAL_GPIO_WritePin(GPIOB,GPIO_PIN_4,GPIO_PIN_SET);}HAL_Delay(2000);
}void closeDusbin()
{__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5);//将舵机置0°flag=CLOSE;HAL_Delay(150);
}void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{if(GPIO_Pin==GPIO_PIN_0||GPIO_Pin==GPIO_PIN_5){if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==GPIO_PIN_RESET ||HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5)==GPIO_PIN_RESET){openStatusLight();openDusbin();}}}/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */float distance;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();MX_TIM4_Init();/* USER CODE BEGIN 2 */initSG90_0();HAL_NVIC_SetPriority(SysTick_IRQn,0,0);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///超声波测距distance=get_distance();if(distance < 10){openStatusLight();//开盖openDusbin();}else{closeStatusLight();//关盖closeDusbin();}}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief TIM2 Initialization Function* @param None* @retval None*/
static void MX_TIM2_Init(void)
{/* USER CODE BEGIN TIM2_Init 0 *//* USER CODE END TIM2_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};/* USER CODE BEGIN TIM2_Init 1 *//* USER CODE END TIM2_Init 1 */htim2.Instance = TIM2;htim2.Init.Prescaler = 71;htim2.Init.CounterMode = TIM_COUNTERMODE_UP;htim2.Init.Period = 65535;htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim2) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM2_Init 2 *//* USER CODE END TIM2_Init 2 */}/*** @brief TIM4 Initialization Function* @param None* @retval None*/
static void MX_TIM4_Init(void)
{/* USER CODE BEGIN TIM4_Init 0 *//* USER CODE END TIM4_Init 0 */TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};/* USER CODE BEGIN TIM4_Init 1 *//* USER CODE END TIM4_Init 1 */htim4.Instance = TIM4;htim4.Init.Prescaler = 7199;htim4.Init.CounterMode = TIM_COUNTERMODE_UP;htim4.Init.Period = 199;htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim4) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim4) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK){Error_Handler();}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_4) != HAL_OK){Error_Handler();}/* USER CODE BEGIN TIM4_Init 2 *//* USER CODE END TIM4_Init 2 */HAL_TIM_MspPostInit(&htim4);}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4|GPIO_PIN_8, GPIO_PIN_SET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);/*Configure GPIO pin : PA0 */GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pins : PB4 PB6 PB8 */GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_6|GPIO_PIN_8;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pin : PB5 */GPIO_InitStruct.Pin = GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/*Configure GPIO pin : PB7 */GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* EXTI interrupt init*/HAL_NVIC_SetPriority(EXTI0_IRQn, 2, 0);HAL_NVIC_EnableIRQ(EXTI0_IRQn);HAL_NVIC_SetPriority(EXTI9_5_IRQn, 2, 0);HAL_NVIC_EnableIRQ(EXTI9_5_IRQn);}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
相关文章:
STM32感应开关盖垃圾桶
目录 项目需求 项目框图 编辑 硬件清单 sg90舵机介绍及实战 sg90舵机介绍 角度控制 SG90舵机编程实现 超声波传感器介绍及实战 超声波传感器介绍 超声波编程实战 项目设计及实现 项目需求 检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖…...

进程跟线程的区别
进程跟线程的区别 文章目录进程跟线程的区别前言一.什么线程二.线程与进程的联系三.线程与进程有什么不同前言 现代所有计算机都能同时做几件事情,当一个用户程序正在运行时,计算机还能同时读取磁盘,并向屏幕打印输出正文.在一个多道操作程序中,cpu由一道程序向另外一道程的切…...

[ICLR 2016] Unsupervised representation learning with DCGANs
目录 IntroductionModel ArchitectureReferencesIntroduction 作者提出了用 CNN 搭建 GAN,使得 GAN 训练更加稳定的一系列准则,并将满足这些设计理念的模型称为 DCGANs (Deep Convolutional GANs). 此外,作者将 trained discriminators 用于图像分类任务,相比于其他无监督算…...

QT编程从入门到精通之十五:“第五章:Qt GUI应用程序设计”之“5.1 UI文件设计与运行机制”之“5.1.2 项目管理文件”
目录 第五章:Qt GUI应用程序设计 5.1 UI文件设计与运行机制 5.1.2 项目管理文件 第五章:Qt GUI应用程序设计 在“Qt 程序创建基础”上,本章将继续深入地介绍Qt Creator设计GUI应用程序的方法...

基于Three.js和MindAR实现的网页端WebAR人脸识别追踪功能的京剧换脸Demo(含源码)
前言 近段时间一直在玩MindAR的功能,之前一直在弄图片识别追踪的功能,发现其强大的功能还有脸部识别和追踪的功能,就基于其面部网格的例子修改了一个国粹京剧的换脸程序。如果你不了解MindAR的环境配置可以先参考这篇文章:基于Mi…...

动态规划思路
拉勾教育版权所有:https://kaiwu.lagou.com/course/courseInfo.htm?courseId3 动态规划思路 1.最优子结构 2.重复计算子机构 3.依靠递归,层层向上传值,所以编程时初始化子结构很重要 动态规划步骤 1.判断动态规划的类型 1.线性规划 >&…...

HTTPS关键词语解释和简单通讯流程
1、 什么是HTTPS HTTPS是基于HTTP的上层添加了一个叫做TLS的安全层,对数据的加密等操作都是在这个安全层中进行处理的,其底层还是应用的HTTP。 2、 什么是对称加密; 加密和解密都是用同一个秘钥 3、 什么是非对称加密; 加密和…...

“前端开发中的三种定时任务及其应用“
前端定时任务是指在一定时间间隔内,自动执行指定的操作或函数。在前端开发中,定时任务被广泛应用于诸如数据更新、定时提醒、定时刷新页面等方面。在本文中,我们将介绍前端中常见的三种定时任务,分别是 setTimeout、setInterval 和…...
| 机考必刷)
华为OD机试题 - 猜字谜(JavaScript)| 机考必刷
更多题库,搜索引擎搜 梦想橡皮擦华为OD 👑👑👑 更多华为OD题库,搜 梦想橡皮擦 华为OD 👑👑👑 更多华为机考题库,搜 梦想橡皮擦华为OD 👑👑👑 华为OD机试题 最近更新的博客使用说明本篇题解:猜字谜题目输入输出描述备注示例一输入输出示例二输入输出思路C…...
python@pyside样式化
文章目录refWidget类创建样式化文件qss引用样式并启动应用ref Styling the Widgets Application - Qt for PythonQt Style Sheets Reference | Qt Widgets 5.15.12 Widget类创建 创建一个简单界面(菜单主要内容)它们是水平布局 主要内容包括一段文本和一个按钮,它们是垂直布…...
)
C++经典15道面试题目(文末含大题)
今天给大家找了几个C面试里很有可能被问的哦,赶紧收藏下来去背!!! 目录 1)C中有malloc/free,为什么还需要new/delete? 2)C中explicit关键字的作用? 3)C中static关键字的作用&a…...

自动计算30天内的股价最高价源代码
我可以回答这个问题。您可以使用以下代码来计算30天内股价的最高价: 复制 import pandas as pd import yfinance as yf # 设置股票代码和日期范围 symbol "AAPL" start_date "2021-01-01" end_date "2021-06-30" # 获取股票…...

国外SEO升级攻略!一看就懂!
SEO是搜索引擎优化的缩写,它是指通过优化网站内容和结构,提升网站在搜索引擎中的排名,从而获得更多的有价值的流量。 而关键词研究和选择是SEO优化中最基础也是最关键的环节,它决定了网站将面向哪些用户、哪些关键词和词组将被优…...
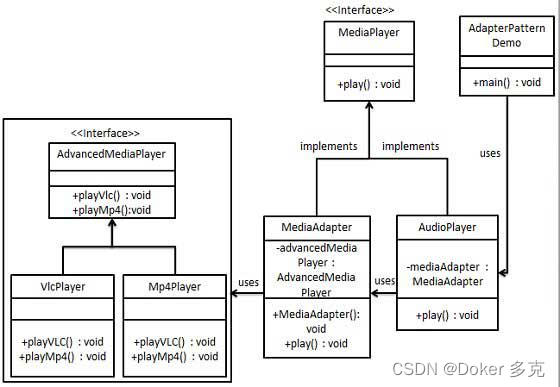
设计模式—适配器模式
适配器模式(Adapter Pattern)是作为两个不兼容的接口之间的桥梁。这种类型的设计模式属于结构型模式,它结合了两个独立接口的功能。这种模式涉及到一个单一的类,该类负责加入独立的或不兼容的接口功能。举个真实的例子,…...
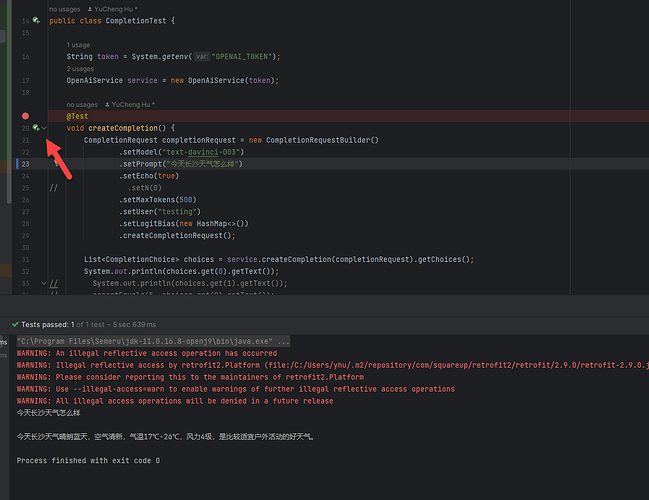
OpenAI-J 如何进行测试
当你检出 OpenAI-J 项目以后,你可以对 OpenAI-J 进行测试。在测试之前你首先需要获得 OpenAI 的 API Key。OpenAI 的 Key通常是以 sk 开头的字符串。最简单粗暴的办法就是把获得的 key 替换掉上面的字符串,然后进行测试就可以了。运行 Unit 测试在我们的…...
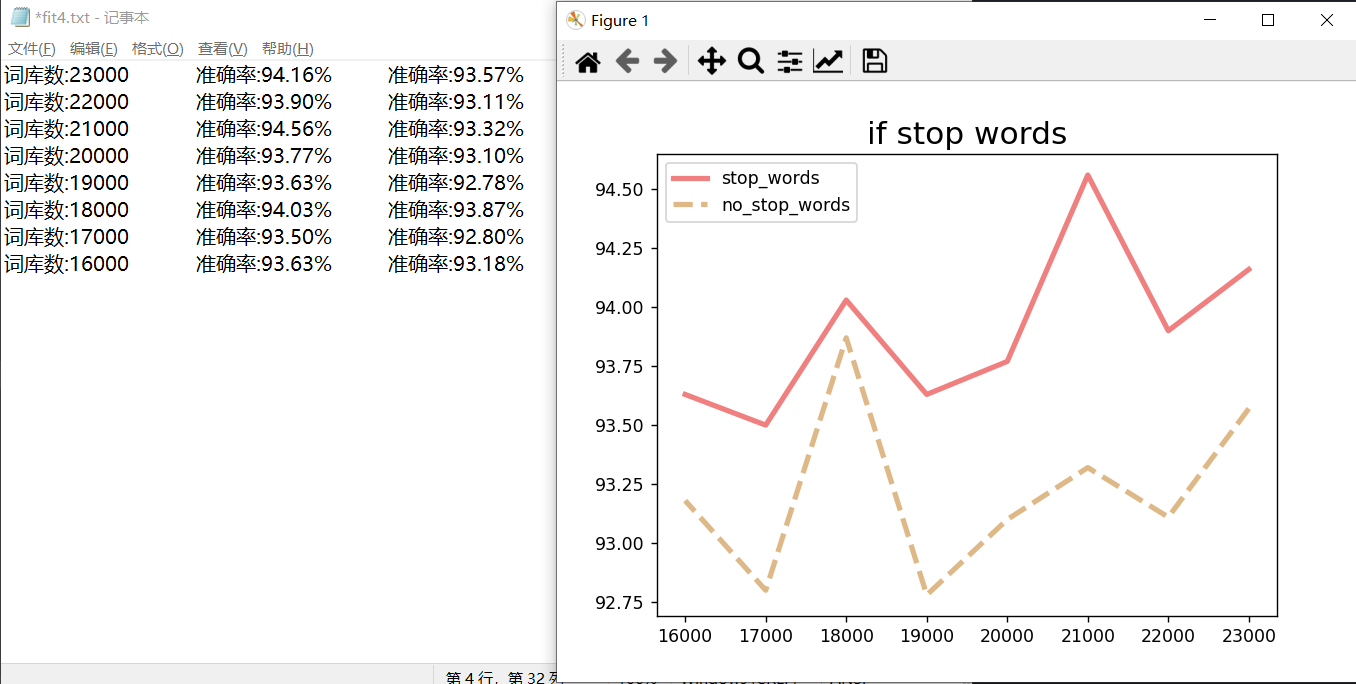
课设-机器学习课设-实现新闻分类
✅作者简介:CSDN内容合伙人、信息安全专业在校大学生🏆 🔥系列专栏 :课设-机器学习 📃新人博主 :欢迎点赞收藏关注,会回访! 💬舞台再大,你不上台,…...

关于异常控制流和系统级 I/O:进程
💭 写在前面:本文将学习《深入理解计算机系统》的第六章 - 关于异常控制流和系统级 I/O 的 进程部分。CSAPP 是计算机科学经典教材《Computer Systems: A Programmers Perspective》的缩写,该教材由Randal E. Bryant和David R. OHallaron 合著…...
)
Unet 基于TCGA颅脑肿瘤MRI分割(交叉熵损失+多通道输出)
目录 1. 介绍 2. Unet 2.1 unet 代码 2.2 测试网络 3. dataset 数据加载 4. train 训练...
)
货物摆放(蓝桥杯C/C++省赛)
题目描述 小蓝有一个超大的仓库,可以摆放很多货物。 现在,小蓝有 nn 箱货物要摆放在仓库,每箱货物都是规则的正方体。小蓝规定了长、宽、高三个互相垂直的方向,每箱货物的边都必须严格平行于长、宽、高。 小蓝希望所有的货物最…...

mysql 索引原理
文章目录 1、索引的本质2、索引的分类2.1、Hash 索引2.2、二叉树2.4、B树(二三树)2.5、B+树3、主键目录4、索引页5、索引页的分层6、非主键索引7.回表1、索引的本质 索引的本质是一种排好序的数据结构。 2、索引的分类 在数据库中,索引是分很多种类的(千万不要狭隘的认为…...
docker详细操作--未完待续
docker介绍 docker官网: Docker:加速容器应用程序开发 harbor官网:Harbor - Harbor 中文 使用docker加速器: Docker镜像极速下载服务 - 毫秒镜像 是什么 Docker 是一种开源的容器化平台,用于将应用程序及其依赖项(如库、运行时环…...
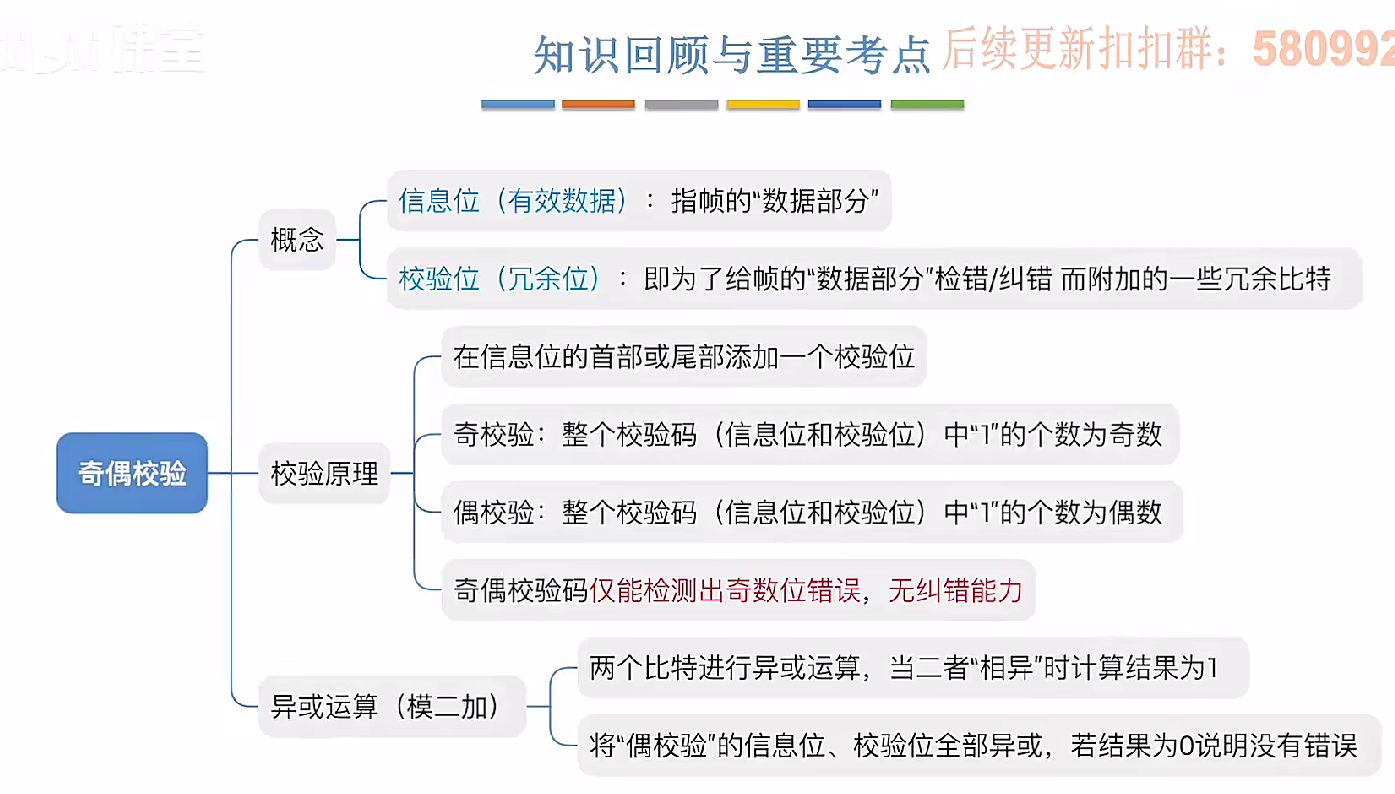
3.3.1_1 检错编码(奇偶校验码)
从这节课开始,我们会探讨数据链路层的差错控制功能,差错控制功能的主要目标是要发现并且解决一个帧内部的位错误,我们需要使用特殊的编码技术去发现帧内部的位错误,当我们发现位错误之后,通常来说有两种解决方案。第一…...
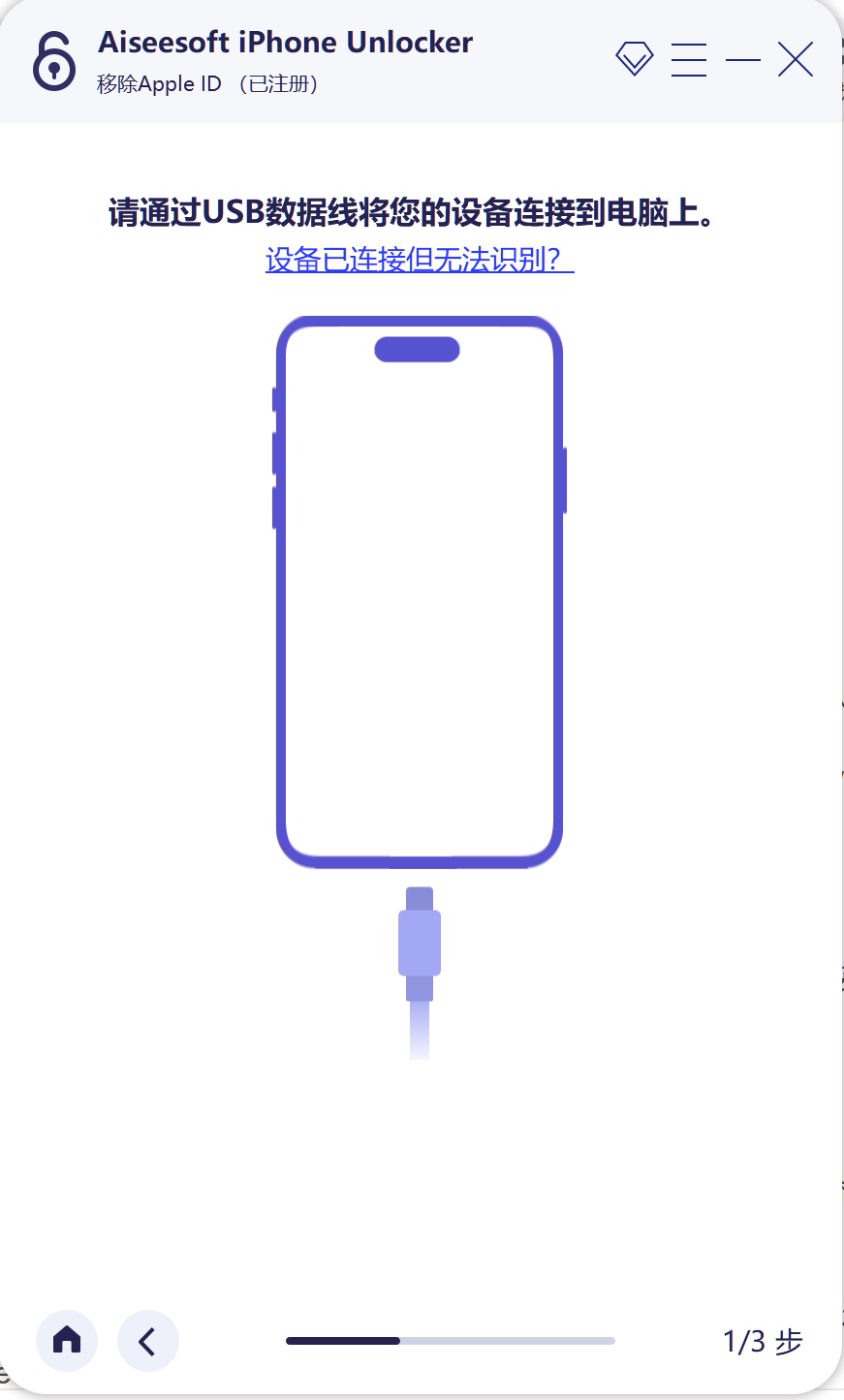
iPhone密码忘记了办?iPhoneUnlocker,iPhone解锁工具Aiseesoft iPhone Unlocker 高级注册版分享
平时用 iPhone 的时候,难免会碰到解锁的麻烦事。比如密码忘了、人脸识别 / 指纹识别突然不灵,或者买了二手 iPhone 却被原来的 iCloud 账号锁住,这时候就需要靠谱的解锁工具来帮忙了。Aiseesoft iPhone Unlocker 就是专门解决这些问题的软件&…...
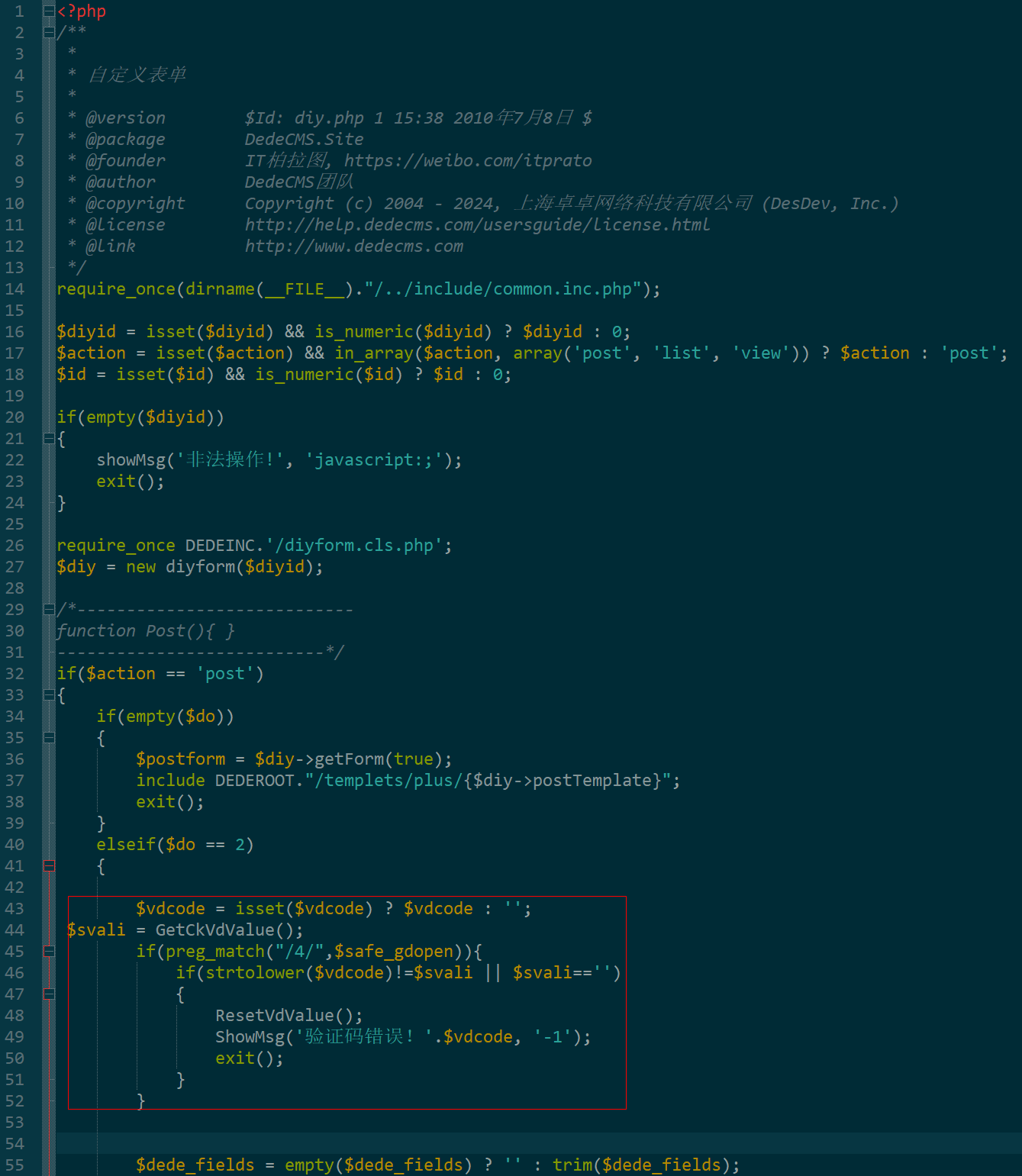
dedecms 织梦自定义表单留言增加ajax验证码功能
增加ajax功能模块,用户不点击提交按钮,只要输入框失去焦点,就会提前提示验证码是否正确。 一,模板上增加验证码 <input name"vdcode"id"vdcode" placeholder"请输入验证码" type"text&quo…...
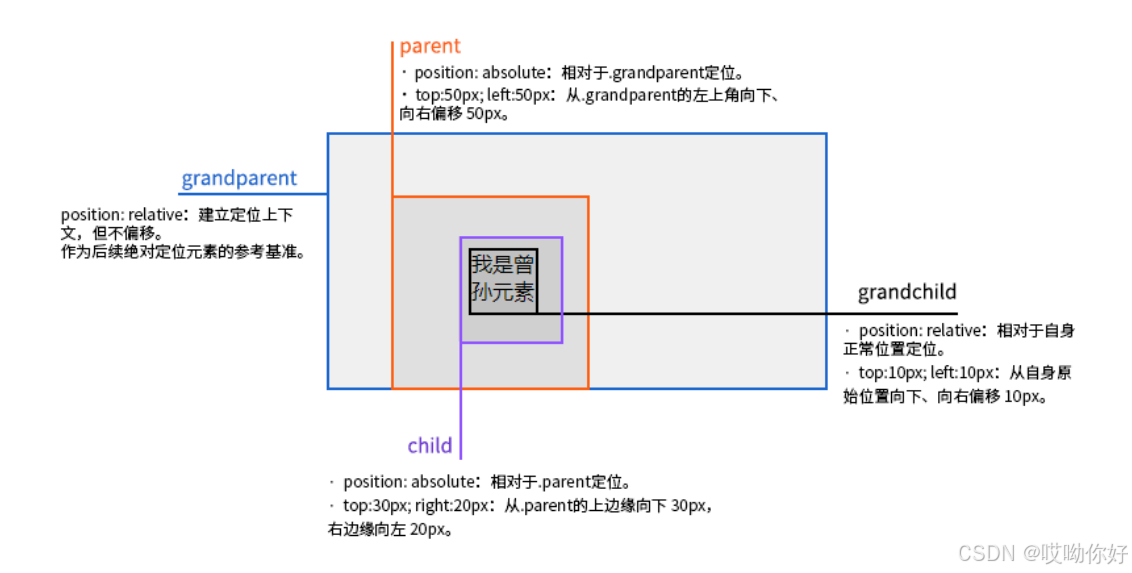
【CSS position 属性】static、relative、fixed、absolute 、sticky详细介绍,多层嵌套定位示例
文章目录 ★ position 的五种类型及基本用法 ★ 一、position 属性概述 二、position 的五种类型详解(初学者版) 1. static(默认值) 2. relative(相对定位) 3. absolute(绝对定位) 4. fixed(固定定位) 5. sticky(粘性定位) 三、定位元素的层级关系(z-i…...
Python实现prophet 理论及参数优化
文章目录 Prophet理论及模型参数介绍Python代码完整实现prophet 添加外部数据进行模型优化 之前初步学习prophet的时候,写过一篇简单实现,后期随着对该模型的深入研究,本次记录涉及到prophet 的公式以及参数调优,从公式可以更直观…...

智能分布式爬虫的数据处理流水线优化:基于深度强化学习的数据质量控制
在数字化浪潮席卷全球的今天,数据已成为企业和研究机构的核心资产。智能分布式爬虫作为高效的数据采集工具,在大规模数据获取中发挥着关键作用。然而,传统的数据处理流水线在面对复杂多变的网络环境和海量异构数据时,常出现数据质…...

今日学习:Spring线程池|并发修改异常|链路丢失|登录续期|VIP过期策略|数值类缓存
文章目录 优雅版线程池ThreadPoolTaskExecutor和ThreadPoolTaskExecutor的装饰器并发修改异常并发修改异常简介实现机制设计原因及意义 使用线程池造成的链路丢失问题线程池导致的链路丢失问题发生原因 常见解决方法更好的解决方法设计精妙之处 登录续期登录续期常见实现方式特…...

在web-view 加载的本地及远程HTML中调用uniapp的API及网页和vue页面是如何通讯的?
uni-app 中 Web-view 与 Vue 页面的通讯机制详解 一、Web-view 简介 Web-view 是 uni-app 提供的一个重要组件,用于在原生应用中加载 HTML 页面: 支持加载本地 HTML 文件支持加载远程 HTML 页面实现 Web 与原生的双向通讯可用于嵌入第三方网页或 H5 应…...

基于Java Swing的电子通讯录设计与实现:附系统托盘功能代码详解
JAVASQL电子通讯录带系统托盘 一、系统概述 本电子通讯录系统采用Java Swing开发桌面应用,结合SQLite数据库实现联系人管理功能,并集成系统托盘功能提升用户体验。系统支持联系人的增删改查、分组管理、搜索过滤等功能,同时可以最小化到系统…...