Qt版海康MV多相机的采集显示程序
创建对话框工程MultiCamera
工程文件MultiCamera.pro
#-------------------------------------------------
#
# Project created by QtCreator 2023-03-11T16:52:53
#
#-------------------------------------------------QT += core guigreaterThan(QT_MAJOR_VERSION, 4): QT += widgetsTARGET = MultiCamera
TEMPLATE = app# The following define makes your compiler emit warnings if you use
# any feature of Qt which has been marked as deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS# You can also make your code fail to compile if you use deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0CONFIG += c++11SOURCES += \main.cpp \multiplecameradlg.cppHEADERS += \multiplecameradlg.hFORMS += \multiplecameradlg.ui# Default rules for deployment.
qnx: target.path = /tmp/$${TARGET}/bin
else: unix:!android: target.path = /opt/$${TARGET}/bin
!isEmpty(target.path): INSTALLS += target
添加海康相机类CMvCamera
将官方例子程序中的CMvCamera类实现的两个文件拷贝过来
CMvCamera.h
/************************************************************************/
/* 以C++接口为基础,对常用函数进行二次封装,方便用户使用 */
/************************************************************************/#ifndef _MV_CAMERA_H_
#define _MV_CAMERA_H_#include "MvCameraControl.h"
#include <string.h>#ifndef MV_NULL
#define MV_NULL 0
#endifclass CMvCamera
{
public:CMvCamera();~CMvCamera();// ch:获取SDK版本号 | en:Get SDK Versionstatic int GetSDKVersion();// ch:枚举设备 | en:Enumerate Devicestatic int EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList);// ch:判断设备是否可达 | en:Is the device accessiblestatic bool IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode);// ch:打开设备 | en:Open Deviceint Open(MV_CC_DEVICE_INFO* pstDeviceInfo);// ch:关闭设备 | en:Close Deviceint Close();// ch:判断相机是否处于连接状态 | en:Is The Device Connectedbool IsDeviceConnected();// ch:注册图像数据回调 | en:Register Image Data CallBackint RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser);// ch:开启抓图 | en:Start Grabbingint StartGrabbing();// ch:停止抓图 | en:Stop Grabbingint StopGrabbing();// ch:主动获取一帧图像数据 | en:Get one frame initiativelyint GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec);// ch:释放图像缓存 | en:Free image bufferint FreeImageBuffer(MV_FRAME_OUT* pFrame);// ch:显示一帧图像 | en:Display one frame imageint DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo);// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDKint SetImageNodeNum(unsigned int nNum);// ch:获取设备信息 | en:Get device informationint GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo);// ch:获取GEV相机的统计信息 | en:Get detect info of GEV cameraint GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect);// ch:获取U3V相机的统计信息 | en:Get detect info of U3V cameraint GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect);// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetIntValue(IN const char* strKey, OUT MVCC_INTVALUE_EX *pIntValue);int SetIntValue(IN const char* strKey, IN int64_t nValue);// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE *pEnumValue);int SetEnumValue(IN const char* strKey, IN unsigned int nValue);int SetEnumValueByString(IN const char* strKey, IN const char* sValue);// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE *pFloatValue);int SetFloatValue(IN const char* strKey, IN float fValue);// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetBoolValue(IN const char* strKey, OUT bool *pbValue);int SetBoolValue(IN const char* strKey, IN bool bValue);// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint GetStringValue(IN const char* strKey, MVCC_STRINGVALUE *pStringValue);int SetStringValue(IN const char* strKey, IN const char * strValue);// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directoryint CommandExecute(IN const char* strKey);// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)int GetOptimalPacketSize(unsigned int* pOptimalPacketSize);// ch:注册消息异常回调 | en:Register Message Exception CallBackint RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser), void* pUser);// ch:注册单个事件回调 | en:Register Event CallBackint RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO * pEventInfo, void* pUser), void* pUser);// ch:强制IP | en:Force IPint ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay);// ch:配置IP方式 | en:IP configuration methodint SetIpConfig(unsigned int nType);// ch:设置网络传输模式 | en:Set Net Transfer Modeint SetNetTransMode(unsigned int nType);// ch:像素格式转换 | en:Pixel format conversionint ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam);// ch:保存图片 | en:save imageint SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam);int SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstSaveFileParam);private:void* m_hDevHandle;MV_CC_DEVICE_INFO m_stDeviceInfo;};#endif//_MV_CAMERA_H_CMvCamera.cpp
#include "MvCamera.h"CMvCamera::CMvCamera()
{m_hDevHandle = MV_NULL;
}CMvCamera::~CMvCamera()
{if (m_hDevHandle){MV_CC_DestroyHandle(m_hDevHandle);m_hDevHandle = MV_NULL;}
}// ch:获取SDK版本号 | en:Get SDK Version
int CMvCamera::GetSDKVersion()
{return MV_CC_GetSDKVersion();
}// ch:枚举设备 | en:Enumerate Device
int CMvCamera::EnumDevices(unsigned int nTLayerType, MV_CC_DEVICE_INFO_LIST* pstDevList)
{return MV_CC_EnumDevices(nTLayerType, pstDevList);
}// ch:判断设备是否可达 | en:Is the device accessible
bool CMvCamera::IsDeviceAccessible(MV_CC_DEVICE_INFO* pstDevInfo, unsigned int nAccessMode)
{return MV_CC_IsDeviceAccessible(pstDevInfo, nAccessMode);
}// ch:打开设备 | en:Open Device
int CMvCamera::Open(MV_CC_DEVICE_INFO* pstDeviceInfo)
{if (MV_NULL == pstDeviceInfo){return MV_E_PARAMETER;}if (m_hDevHandle){return MV_E_CALLORDER;}int nRet = MV_CC_CreateHandle(&m_hDevHandle, pstDeviceInfo);if (MV_OK != nRet){return nRet;}nRet = MV_CC_OpenDevice(m_hDevHandle);if (MV_OK != nRet){MV_CC_DestroyHandle(m_hDevHandle);m_hDevHandle = MV_NULL;}memcpy(&m_stDeviceInfo, pstDeviceInfo, sizeof(MV_CC_DEVICE_INFO));return nRet;
}// ch:关闭设备 | en:Close Device
int CMvCamera::Close()
{if (MV_NULL == m_hDevHandle){return MV_E_HANDLE;}MV_CC_CloseDevice(m_hDevHandle);int nRet = MV_CC_DestroyHandle(m_hDevHandle);m_hDevHandle = MV_NULL;return nRet;
}// ch:判断相机是否处于连接状态 | en:Is The Device Connected
bool CMvCamera::IsDeviceConnected()
{return MV_CC_IsDeviceConnected(m_hDevHandle);
}// ch:注册图像数据回调 | en:Register Image Data CallBack
int CMvCamera::RegisterImageCallBack(void(__stdcall* cbOutput)(unsigned char * pData, MV_FRAME_OUT_INFO_EX* pFrameInfo, void* pUser), void* pUser)
{return MV_CC_RegisterImageCallBackEx(m_hDevHandle, cbOutput, pUser);
}// ch:开启抓图 | en:Start Grabbing
int CMvCamera::StartGrabbing()
{return MV_CC_StartGrabbing(m_hDevHandle);
}// ch:停止抓图 | en:Stop Grabbing
int CMvCamera::StopGrabbing()
{return MV_CC_StopGrabbing(m_hDevHandle);
}// ch:主动获取一帧图像数据 | en:Get one frame initiatively
int CMvCamera::GetImageBuffer(MV_FRAME_OUT* pFrame, int nMsec)
{return MV_CC_GetImageBuffer(m_hDevHandle, pFrame, nMsec);
}// ch:释放图像缓存 | en:Free image buffer
int CMvCamera::FreeImageBuffer(MV_FRAME_OUT* pFrame)
{return MV_CC_FreeImageBuffer(m_hDevHandle, pFrame);
}// ch:设置显示窗口句柄 | en:Set Display Window Handle
int CMvCamera::DisplayOneFrame(MV_DISPLAY_FRAME_INFO* pDisplayInfo)
{return MV_CC_DisplayOneFrame(m_hDevHandle, pDisplayInfo);
}// ch:设置SDK内部图像缓存节点个数 | en:Set the number of the internal image cache nodes in SDK
int CMvCamera::SetImageNodeNum(unsigned int nNum)
{return MV_CC_SetImageNodeNum(m_hDevHandle, nNum);
}// ch:获取设备信息 | en:Get device information
int CMvCamera::GetDeviceInfo(MV_CC_DEVICE_INFO* pstDevInfo)
{if (pstDevInfo){memcpy(pstDevInfo, &m_stDeviceInfo, sizeof(MV_CC_DEVICE_INFO));return MV_OK;}return MV_E_PARAMETER;
}// ch:获取GEV相机的统计信息 | en:Get detect info of GEV camera
int CMvCamera::GetGevAllMatchInfo(MV_MATCH_INFO_NET_DETECT* pMatchInfoNetDetect)
{if (MV_NULL == pMatchInfoNetDetect){return MV_E_PARAMETER;}MV_CC_DEVICE_INFO stDevInfo = {0};GetDeviceInfo(&stDevInfo);if (stDevInfo.nTLayerType != MV_GIGE_DEVICE){return MV_E_SUPPORT;}MV_ALL_MATCH_INFO struMatchInfo = {0};struMatchInfo.nType = MV_MATCH_TYPE_NET_DETECT;struMatchInfo.pInfo = pMatchInfoNetDetect;struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_NET_DETECT);memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_NET_DETECT));return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}// ch:获取U3V相机的统计信息 | en:Get detect info of U3V camera
int CMvCamera::GetU3VAllMatchInfo(MV_MATCH_INFO_USB_DETECT* pMatchInfoUSBDetect)
{if (MV_NULL == pMatchInfoUSBDetect){return MV_E_PARAMETER;}MV_CC_DEVICE_INFO stDevInfo = {0};GetDeviceInfo(&stDevInfo);if (stDevInfo.nTLayerType != MV_USB_DEVICE){return MV_E_SUPPORT;}MV_ALL_MATCH_INFO struMatchInfo = {0};struMatchInfo.nType = MV_MATCH_TYPE_USB_DETECT;struMatchInfo.pInfo = pMatchInfoUSBDetect;struMatchInfo.nInfoSize = sizeof(MV_MATCH_INFO_USB_DETECT);memset(struMatchInfo.pInfo, 0, sizeof(MV_MATCH_INFO_USB_DETECT));return MV_CC_GetAllMatchInfo(m_hDevHandle, &struMatchInfo);
}// ch:获取和设置Int型参数,如 Width和Height,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Int type parameters, such as Width and Height, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetIntValue(IN const char* strKey, OUT MVCC_INTVALUE_EX *pIntValue)
{return MV_CC_GetIntValueEx(m_hDevHandle, strKey, pIntValue);
}int CMvCamera::SetIntValue(IN const char* strKey, IN int64_t nValue)
{return MV_CC_SetIntValueEx(m_hDevHandle, strKey, nValue);
}// ch:获取和设置Enum型参数,如 PixelFormat,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Enum type parameters, such as PixelFormat, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetEnumValue(IN const char* strKey, OUT MVCC_ENUMVALUE *pEnumValue)
{return MV_CC_GetEnumValue(m_hDevHandle, strKey, pEnumValue);
}int CMvCamera::SetEnumValue(IN const char* strKey, IN unsigned int nValue)
{return MV_CC_SetEnumValue(m_hDevHandle, strKey, nValue);
}int CMvCamera::SetEnumValueByString(IN const char* strKey, IN const char* sValue)
{return MV_CC_SetEnumValueByString(m_hDevHandle, strKey, sValue);
}// ch:获取和设置Float型参数,如 ExposureTime和Gain,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Float type parameters, such as ExposureTime and Gain, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetFloatValue(IN const char* strKey, OUT MVCC_FLOATVALUE *pFloatValue)
{return MV_CC_GetFloatValue(m_hDevHandle, strKey, pFloatValue);
}int CMvCamera::SetFloatValue(IN const char* strKey, IN float fValue)
{return MV_CC_SetFloatValue(m_hDevHandle, strKey, fValue);
}// ch:获取和设置Bool型参数,如 ReverseX,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Get Bool type parameters, such as ReverseX, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetBoolValue(IN const char* strKey, OUT bool *pbValue)
{return MV_CC_GetBoolValue(m_hDevHandle, strKey, pbValue);
}int CMvCamera::SetBoolValue(IN const char* strKey, IN bool bValue)
{return MV_CC_SetBoolValue(m_hDevHandle, strKey, bValue);
}// ch:获取和设置String型参数,如 DeviceUserID,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件UserSetSave
// en:Get String type parameters, such as DeviceUserID, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::GetStringValue(IN const char* strKey, MVCC_STRINGVALUE *pStringValue)
{return MV_CC_GetStringValue(m_hDevHandle, strKey, pStringValue);
}int CMvCamera::SetStringValue(IN const char* strKey, IN const char* strValue)
{return MV_CC_SetStringValue(m_hDevHandle, strKey, strValue);
}// ch:执行一次Command型命令,如 UserSetSave,详细内容参考SDK安装目录下的 MvCameraNode.xlsx 文件
// en:Execute Command once, such as UserSetSave, for details please refer to MvCameraNode.xlsx file under SDK installation directory
int CMvCamera::CommandExecute(IN const char* strKey)
{return MV_CC_SetCommandValue(m_hDevHandle, strKey);
}// ch:探测网络最佳包大小(只对GigE相机有效) | en:Detection network optimal package size(It only works for the GigE camera)
int CMvCamera::GetOptimalPacketSize(unsigned int* pOptimalPacketSize)
{if (MV_NULL == pOptimalPacketSize){return MV_E_PARAMETER;}int nRet = MV_CC_GetOptimalPacketSize(m_hDevHandle);if (nRet < MV_OK){return nRet;}*pOptimalPacketSize = (unsigned int)nRet;return MV_OK;
}// ch:注册消息异常回调 | en:Register Message Exception CallBack
int CMvCamera::RegisterExceptionCallBack(void(__stdcall* cbException)(unsigned int nMsgType, void* pUser),void* pUser)
{return MV_CC_RegisterExceptionCallBack(m_hDevHandle, cbException, pUser);
}// ch:注册单个事件回调 | en:Register Event CallBack
int CMvCamera::RegisterEventCallBack(const char* pEventName, void(__stdcall* cbEvent)(MV_EVENT_OUT_INFO * pEventInfo, void* pUser), void* pUser)
{return MV_CC_RegisterEventCallBackEx(m_hDevHandle, pEventName, cbEvent, pUser);
}// ch:强制IP | en:Force IP
int CMvCamera::ForceIp(unsigned int nIP, unsigned int nSubNetMask, unsigned int nDefaultGateWay)
{return MV_GIGE_ForceIpEx(m_hDevHandle, nIP, nSubNetMask, nDefaultGateWay);
}// ch:配置IP方式 | en:IP configuration method
int CMvCamera::SetIpConfig(unsigned int nType)
{return MV_GIGE_SetIpConfig(m_hDevHandle, nType);
}// ch:设置网络传输模式 | en:Set Net Transfer Mode
int CMvCamera::SetNetTransMode(unsigned int nType)
{return MV_GIGE_SetNetTransMode(m_hDevHandle, nType);
}// ch:像素格式转换 | en:Pixel format conversion
int CMvCamera::ConvertPixelType(MV_CC_PIXEL_CONVERT_PARAM* pstCvtParam)
{return MV_CC_ConvertPixelType(m_hDevHandle, pstCvtParam);
}// ch:保存图片 | en:save image
int CMvCamera::SaveImage(MV_SAVE_IMAGE_PARAM_EX* pstParam)
{return MV_CC_SaveImageEx2(m_hDevHandle, pstParam);
}int CMvCamera::SaveImageToFile(MV_SAVE_IMG_TO_FILE_PARAM* pstSaveFileParam)
{return MV_CC_SaveImageToFile(m_hDevHandle, pstSaveFileParam);
}添加SDK,包括上面类CMvCamera程序中缺少的"MvCameraControl.h"
在MVS的安装目录中找到development目录,将include与libraries子目录拷到我们工程文件夹下,重新命名为SDK,如下,

导入外部库,我们这里是64位的MvCameraControl.lib,导入后的工程文件改变如下,
win32: LIBS += -L$$PWD/SDK/Libraries/win64/ -lMvCameraControlINCLUDEPATH += $$PWD/SDK/Includes
DEPENDPATH += $$PWD/SDK/Includeswin32:!win32-g++: PRE_TARGETDEPS += $$PWD/SDK/Libraries/win64/MvCameraControl.lib
else:win32-g++: PRE_TARGETDEPS += $$PWD/SDK/Libraries/win64/libMvCameraControl.a到这里已经添加了海康的SDK库,试着编译一下我们刚刚添加的类CMvCamera,
报没有头文件的错,

原因很简单,是因为我们CMvCamera类的头文件与源文件名字有差别,现在的头文件应该是cmvcamera.h.
修改后,编译正常。下面还有两个事情要做一下:
一个是添加opencv库,我们的下面的程序的图形处理是基于Opencv的;
另一个是仿照例子程序把界面设计出来并实现它们的功能。
添加Opencv库,
本实验平台opencv安装路径在c盘,所以添加外部库后,工程文件修改如下,
win32:CONFIG(release, debug|release): LIBS += -LC:/opencv/build/x64/vc15/lib/ -lopencv_world453
else:win32:CONFIG(debug, debug|release): LIBS += -LC:/opencv/build/x64/vc15/lib/ -lopencv_world453dINCLUDEPATH += C:/opencv/build/include
DEPENDPATH += C:/opencv/build/include设计应用程序界面
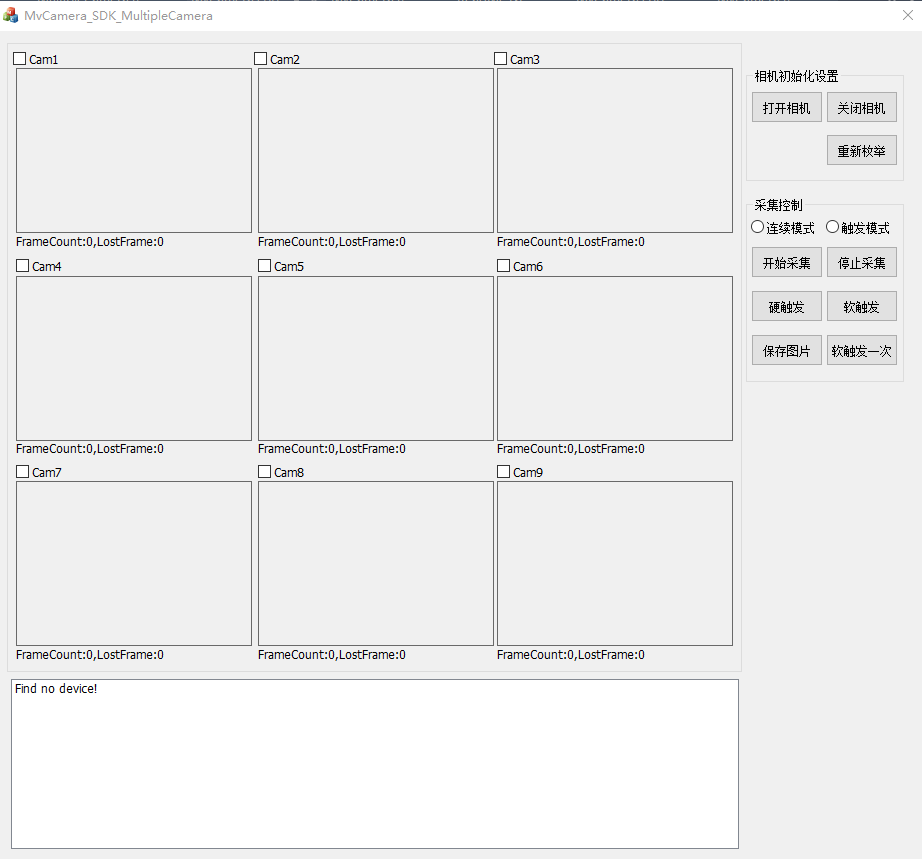
原先的界面(9个相机)
新设计的界面,考虑相机数目少一些4个,功能不增不减。
具体设计与实现,见后续博文
相关文章:
Qt版海康MV多相机的采集显示程序
创建对话框工程MultiCamera工程文件MultiCamera.pro#------------------------------------------------- # # Project created by QtCreator 2023-03-11T16:52:53 # #-------------------------------------------------QT core guigreaterThan(QT_MAJOR_VERSION, 4): …...

2023年江苏省职业院校技能大赛中职网络安全赛项试卷-教师组任务书
2023年江苏省职业院校技能大赛中职网络安全赛项试卷-教师组任务书 一、竞赛时间 9:00-12:00,12:00-15:00,15:00-17:00共计8小时。 二、竞赛阶段 竞赛阶段 任务阶段 竞赛任务 竞赛时间 分值 第一阶段 基础设施设置与安全加固、网络安全事件响应、数…...
零基础小白如何自学网络安全成为顶尖黑客?
在成为黑客之前,你需要做两点准备: 1、学一门编程语言。学哪一门不重要,但你要参考一下下面的条例: C语言是Unix系统的基础。它(连同汇编语言)能让你学习对黑客非常重要的知识:内存的工作原理…...

外贸建站如何提高搜索引擎排名,吸引更多潜在客户?
在如今全球贸易日益繁荣的背景下,越来越多的企业开始重视外贸建站,并寻求提高搜索引擎排名以吸引更多潜在客户。 那么,如何才能有效地提高外贸网站的搜索引擎排名呢?本文将为您详细介绍几个有效的方法。 一、关键词优化 关键词…...
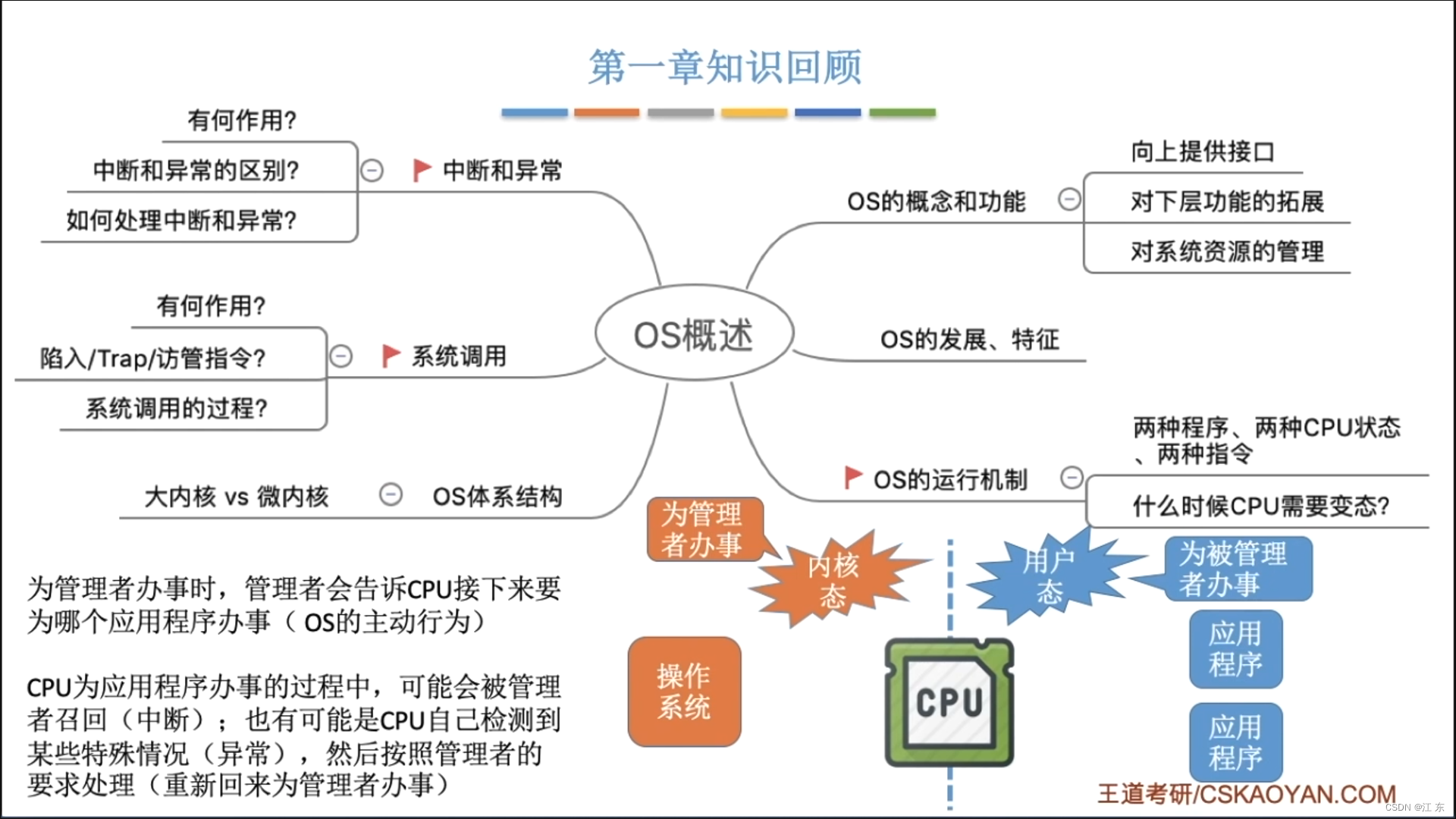
计算机网络考研-第一章学
计算机网学习总结第一章计算机系统概述1.1.1 导学1.1.2 操作系统的特征1.2 操作系统的发展与分类1.3 操作系统的运行环境1.3.1 操作系统的运行机制1.3.2 中断和异常1.3.3系统调用:1.3.4 操作系统的体系结构第一章总结第一章计算机系统概述 1.1.1 导学 1.1.2 操作系…...
【分布式版本控制系统Git】| Git概述、Git安装、Git常用命令
目录 一:概述 1.1. 何为版本控制 1.2. 为什么需要版本控制 1.3. 版本控制工具 1.4. Git 简史 1.5. Git 工作机制 1.6. Git和代码托管中心 二:安装 2.1. Git安装 三:常用命令 3.1 设置用户签名 3.2 初始化本地库 3.3 查看本地库…...

【人脸识别】ssd + opencv Eigenfaces 和 LBPH算法进行人脸监测和识别
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录前言ssd opencv Eigenfaces 和 LBPH算法进行人脸监测和识别1. ssd 目标监测2.opencv的三种人脸识别方法2.1 Eigenfaces2.2 LBPH前言 ssd opencv Eigenfaces 和 LB…...
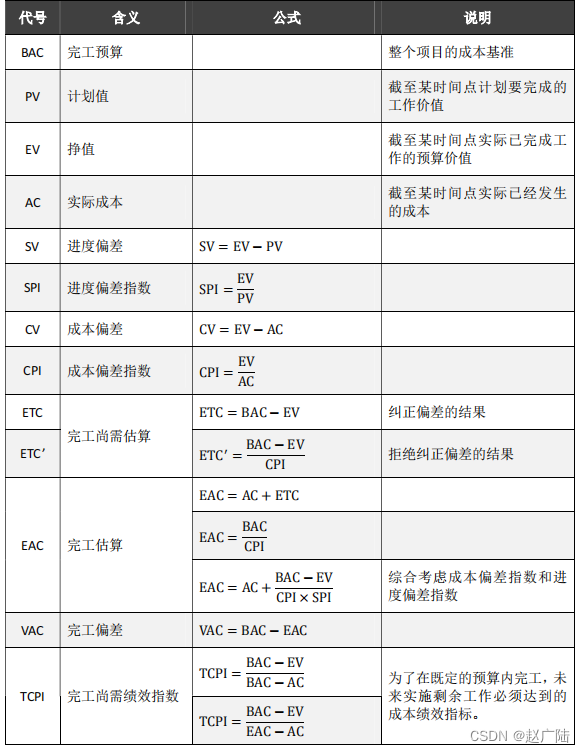
PMP项目管理项目成本管理
目录1 项目成本管理概述2 规划成本管理3 估算成本4 制定预算5 控制成本1 项目成本管理概述 项目成本管理包括为使项目在批准的预算内完成而对成本进行规划、估算、预测、融资、筹资、管理和控制的各个过程,从而确保项目在批准的预算内完工。核心概念 项目成本管理旨…...

Vue3视频播放器组件Vue3-video-play入门教程
Vue3-video-play适用于 Vue3 的 hls.js 播放器组件 | 并且支持MP4/WebM/Ogg格式。 1、支持快捷键操作 2、支持倍速播放设置 3、支持镜像画面设置 4、支持关灯模式设置 5、支持画中画模式播放 6、支持全屏/网页全屏播放 7、支持从固定时间开始播放 8、支持移动端,移动…...

操作系统经典问题——消费者生产者问题
今日在学习操作系统的过程中遇到了这个问题,实在是很苦恼一时间对于这种问题以及老师上课根据这个问题衍生的问题实在是一头雾水。在网络上寻找了一些大佬的讲解之后算是暂时有了点茅塞顿开的感觉。 首先第一点什么是生产者——消费者问题: 系统中有一…...
网络安全工程师在面试安全岗位时,哪些内容是加分项?
金三银四已经来了,很多小伙伴都在困惑,面试网络安全工程师的时候,有哪些技能是加分项呢?接下来,我简单说说! 去年我在微博上贴了一些在面试安全工作时会加分的内容,如下: 1. wooyu…...

前端整理 —— vue
1. vue的生命周期 经典爱问,感觉内容挺多的 介绍一下有哪几个 vue2中的生命周期有11个,分别为beforeCreate,created,beforeMount,mounted,beforeUpdate,updated,beforeDestroy&…...
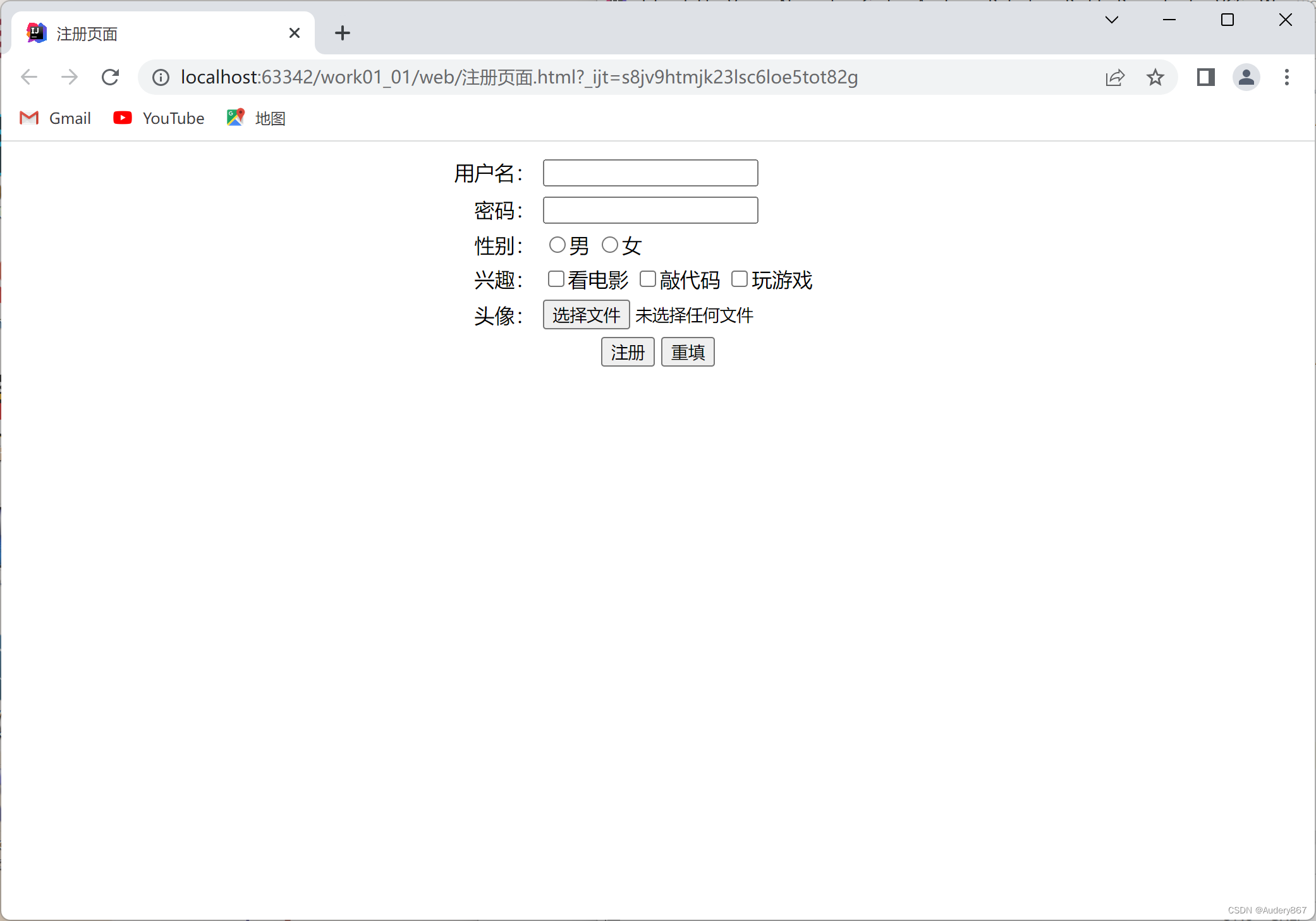
HTML快速入门
目录HTML概念HTML基本格式基本语法常用标签1.文件标签:构成html最基本的标签2.文本标签:和文本有关的标签3.列表标签4.图片标签5.超链接标签6.表格标签7.表单标签HTML概念 HTML是最基础的网页开发语言,Hyper Text Markup Language࿰…...
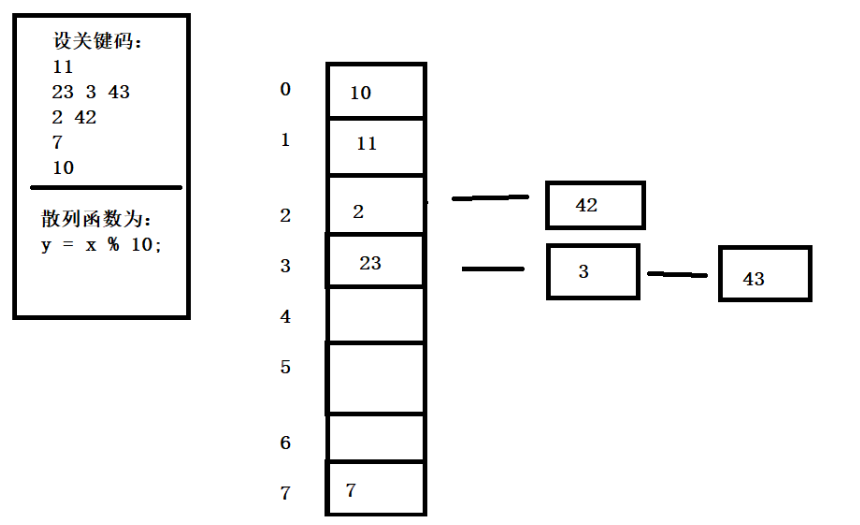
哈希冲突
为什么会有哈希冲突?哈希表通过哈希函数来计算存放数据,在curd数据时不用多次比较,时间复杂度O(1)。但是凡事都有利弊,不同关键字通过相同哈希函数可能计算出来相同的存放地址,这种现象被称为哈…...
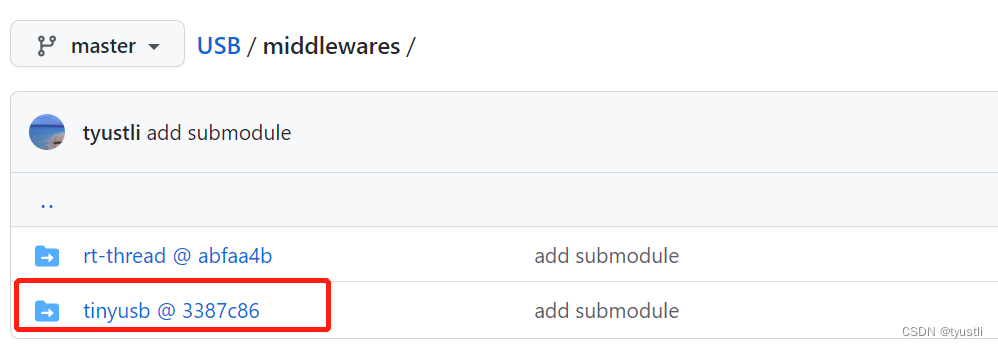
git添加子模块(submodule)
git添加子模块(submodule) 背景 有时候自己的项目需要用到别人的开源代码,例如 freertos 和 tinyusb 这个时候有两种选择 将开源的代码下载下来放到自己的 git 中管理 缺点:如果远端仓库更新,自己仓库的代码不会更新 将开源代码通过子模块…...
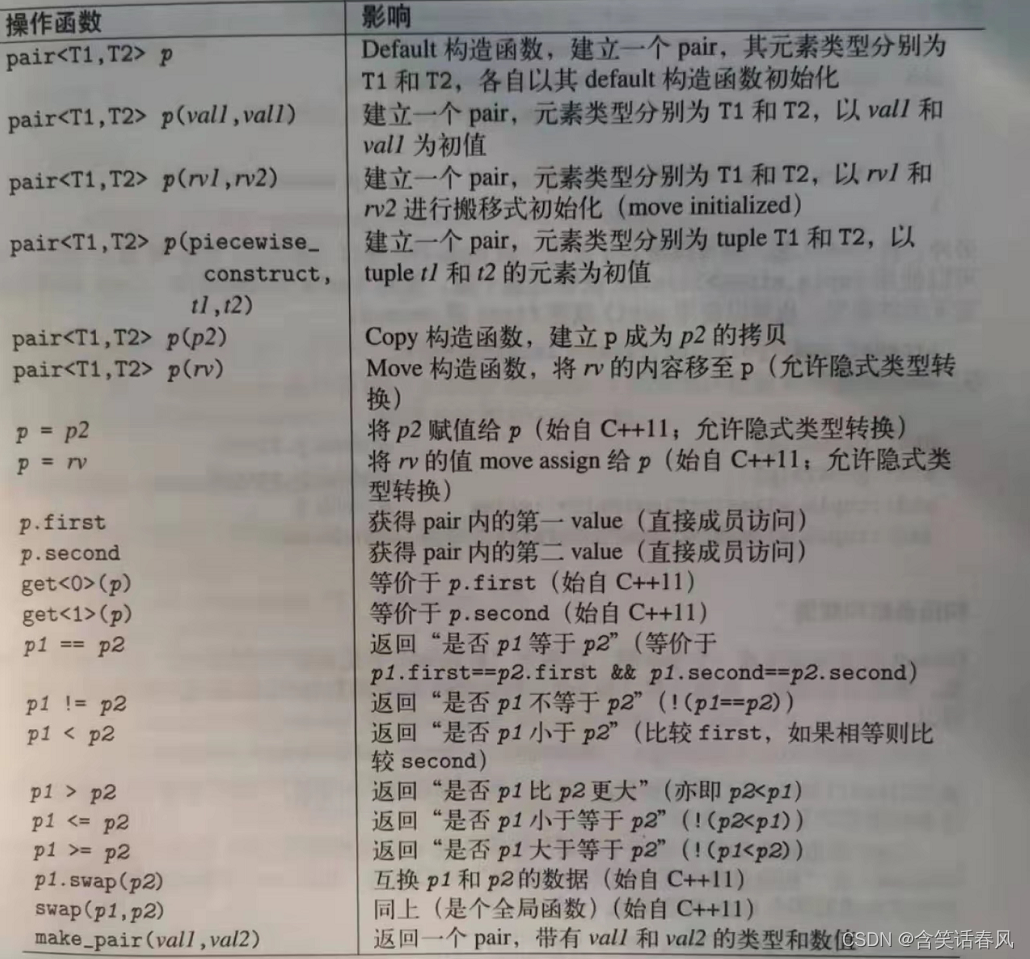
C++ 11 pair
class pair 可将两个 value视为一个单元。C标准库内多处用到了这个 class 。尤其是容器 map、multimap、unordered_map和 unordered_multimap就是使用 pair 来管理其以 key/value pair形式存在的元素。任何函数如果需要返回两个 value,也需要用到 pair,例…...

反向传播与随机梯度下降
反向传播实际上就是在算各个阶段梯度,每层的传入实际是之前各层根据链式法则梯度相乘的结果。反向传播最初传入的Δout是1,Δ通常表示很少量的意思,Δout1的时候这样在反向传播的时候算出来的dw和dx刚好就是当前梯度。深度神经网络中每层都会…...

一个conda引起的CPU异常
03/11/2023 登陆访问用户CPU异常 错误描述 早上向往常一样打开机器,突然感觉CPU有点"乱飙",因为是个人机器,没有别人使用,所以感觉有点问题。 排错流程 首先查看各个进程的资源占用情况 top # 按住P,以CPU的…...
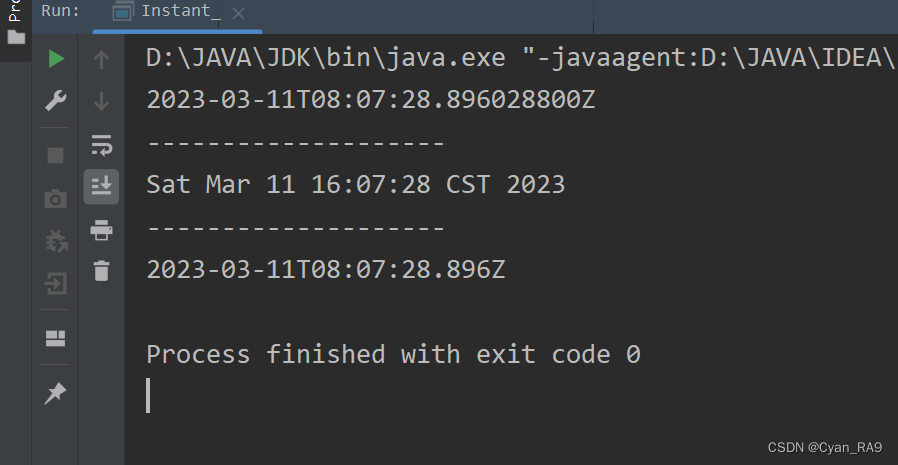
java Date 和 Calendar类 万字详解(通俗易懂)
Date类介绍及使用关于SimpleDateFormat类Calendar类介绍及使用LocalDateTime类介绍及使用关于DateTimeFormatter类一、前言本节内容是我们《API-常用类》专题的第五小节了。本节内容主要讲Date 类 和 Calendar 类,内容包括但不限于Date类简介,Date类使用…...
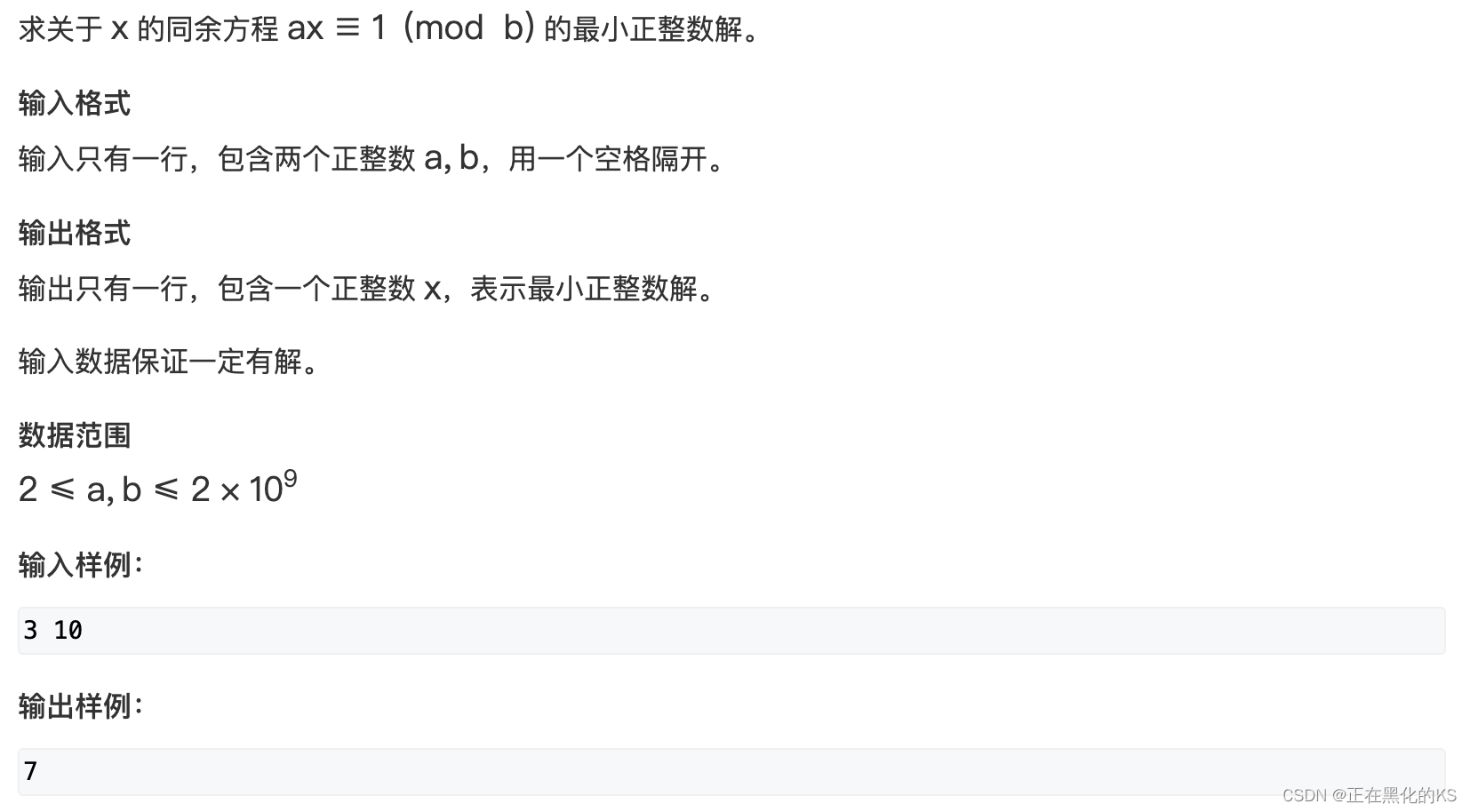
扩展欧几里得算法及其应用
前言 由于数论的板子真的很抽象,也很难背,所以特此记录扩展欧几里得算法的板子和它的用途 本篇文章只涉及应用,不涉及证明,如需理解证明还请各位移步其他优秀的讲解! 扩展欧几里得算法 先粘一下板子的代码 typedef lo…...
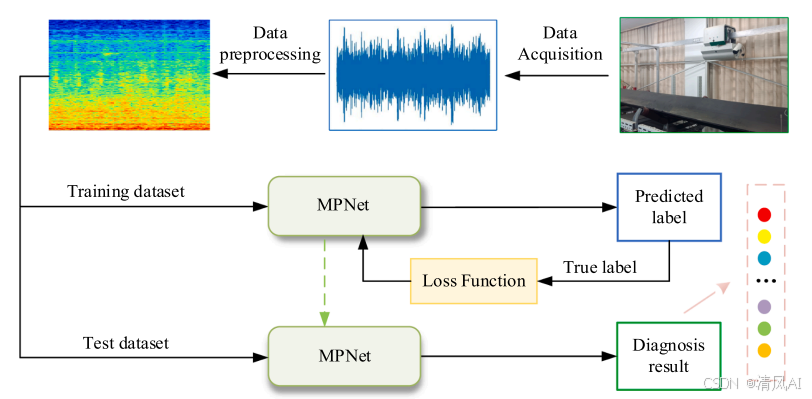
MPNet:旋转机械轻量化故障诊断模型详解python代码复现
目录 一、问题背景与挑战 二、MPNet核心架构 2.1 多分支特征融合模块(MBFM) 2.2 残差注意力金字塔模块(RAPM) 2.2.1 空间金字塔注意力(SPA) 2.2.2 金字塔残差块(PRBlock) 2.3 分类器设计 三、关键技术突破 3.1 多尺度特征融合 3.2 轻量化设计策略 3.3 抗噪声…...
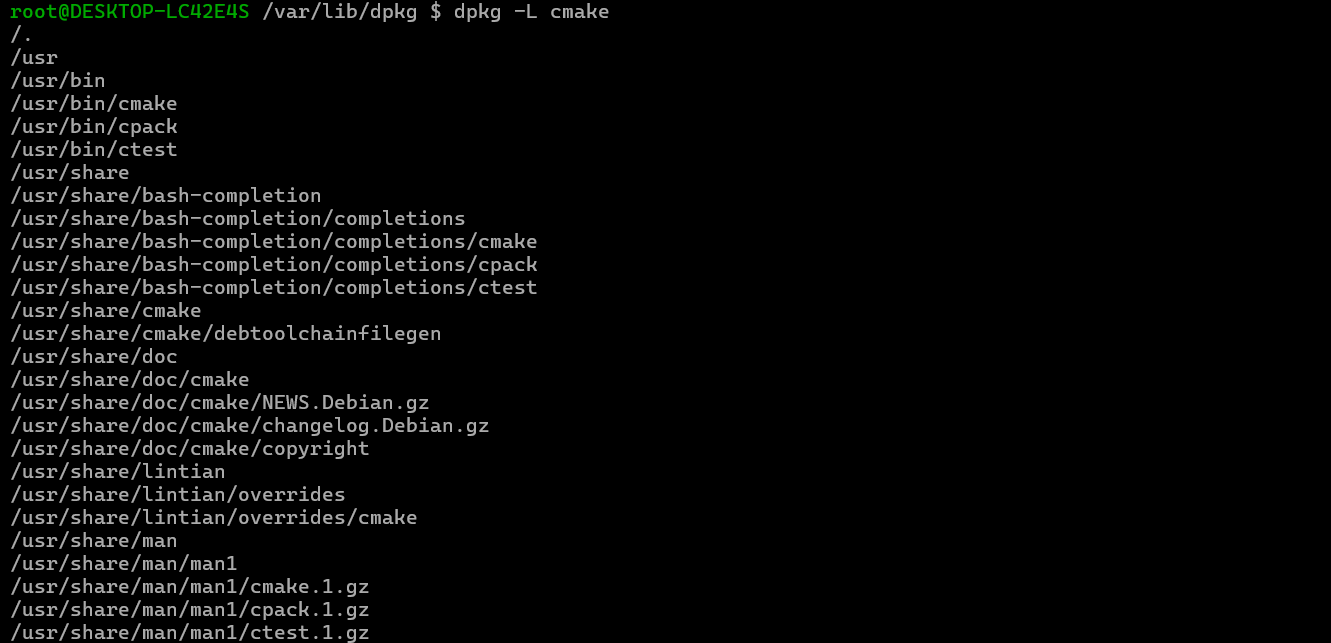
Debian系统简介
目录 Debian系统介绍 Debian版本介绍 Debian软件源介绍 软件包管理工具dpkg dpkg核心指令详解 安装软件包 卸载软件包 查询软件包状态 验证软件包完整性 手动处理依赖关系 dpkg vs apt Debian系统介绍 Debian 和 Ubuntu 都是基于 Debian内核 的 Linux 发行版ÿ…...
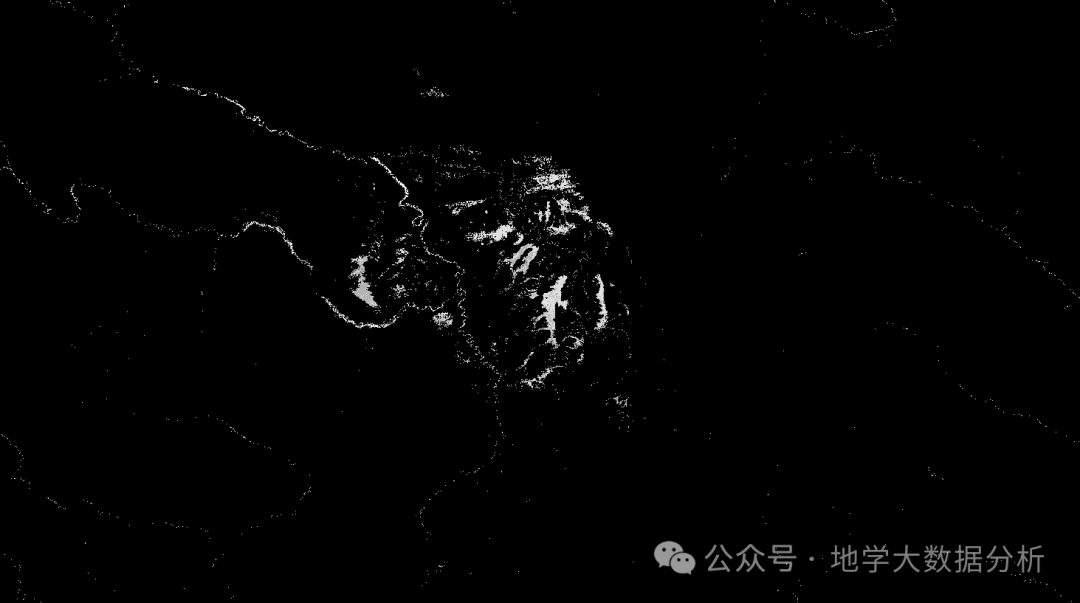
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...

vue3 定时器-定义全局方法 vue+ts
1.创建ts文件 路径:src/utils/timer.ts 完整代码: import { onUnmounted } from vuetype TimerCallback (...args: any[]) > voidexport function useGlobalTimer() {const timers: Map<number, NodeJS.Timeout> new Map()// 创建定时器con…...

【python异步多线程】异步多线程爬虫代码示例
claude生成的python多线程、异步代码示例,模拟20个网页的爬取,每个网页假设要0.5-2秒完成。 代码 Python多线程爬虫教程 核心概念 多线程:允许程序同时执行多个任务,提高IO密集型任务(如网络请求)的效率…...

汇编常见指令
汇编常见指令 一、数据传送指令 指令功能示例说明MOV数据传送MOV EAX, 10将立即数 10 送入 EAXMOV [EBX], EAX将 EAX 值存入 EBX 指向的内存LEA加载有效地址LEA EAX, [EBX4]将 EBX4 的地址存入 EAX(不访问内存)XCHG交换数据XCHG EAX, EBX交换 EAX 和 EB…...
多模态大语言模型arxiv论文略读(108)
CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文标题:CROME: Cross-Modal Adapters for Efficient Multimodal LLM ➡️ 论文作者:Sayna Ebrahimi, Sercan O. Arik, Tejas Nama, Tomas Pfister ➡️ 研究机构: Google Cloud AI Re…...
:邮件营销与用户参与度的关键指标优化指南)
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南
精益数据分析(97/126):邮件营销与用户参与度的关键指标优化指南 在数字化营销时代,邮件列表效度、用户参与度和网站性能等指标往往决定着创业公司的增长成败。今天,我们将深入解析邮件打开率、网站可用性、页面参与时…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...

2025季度云服务器排行榜
在全球云服务器市场,各厂商的排名和地位并非一成不变,而是由其独特的优势、战略布局和市场适应性共同决定的。以下是根据2025年市场趋势,对主要云服务器厂商在排行榜中占据重要位置的原因和优势进行深度分析: 一、全球“三巨头”…...