14 卡尔曼滤波及代码实现
文章目录
- 14 卡尔曼滤波及代码实现
- 14.0 基本概念
- 14.1 公式推导
- 14.2 代码实现
14 卡尔曼滤波及代码实现
14.0 基本概念
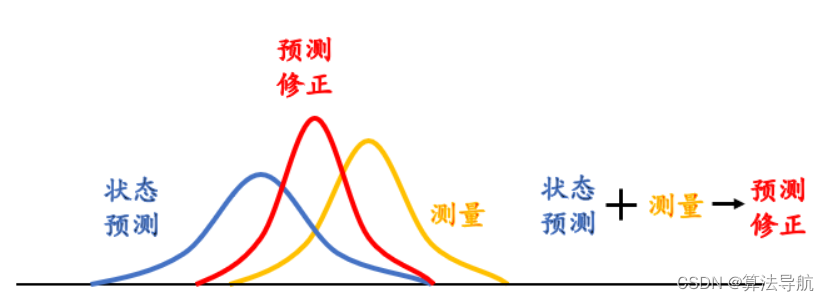
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
通俗来说就是,线性数学模型算出预测值+传感器测量值=更准确的测量值。根据数学模型,由第 k k k 时刻的值递推得到第 k + 1 k+1 k+1 时刻的预测值,结合第 k + 1 k+1 k+1 时刻的观测值,得到第 k + 1 k+1 k+1 时刻更精准的值。
卡尔曼滤波主要用于 线性高斯系统。
14.1 公式推导
(1)线性高斯系统表达
状态方程:
x k = A x k − 1 + B u k + w k \boldsymbol{x}_k = \boldsymbol{A}\boldsymbol{x}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k+\boldsymbol{w}_k xk=Axk−1+Buk+wk
观测方程:
z k = H x k + v k \boldsymbol{z}_k = \boldsymbol{H}\boldsymbol{x}_k+\boldsymbol{v}_k zk=Hxk+vk
其中, x k \boldsymbol{x}_k xk 为状态量, z k \boldsymbol{z}_k zk 为观测量, A \boldsymbol{A} A 为状态转移矩阵, B k \boldsymbol{B}_k Bk 为控制输入矩阵, H \boldsymbol{H} H 为状态观测矩阵。
w k \boldsymbol{w}_k wk 是过程噪声,服从高斯分布, w k \boldsymbol{w}_k wk 是观测噪声,也服从高斯分布,即:
w k ∼ N ( 0 , Q ) \boldsymbol{w}_k \sim N(0, \boldsymbol{Q}) wk∼N(0,Q)
v k ∼ N ( 0 , R ) \boldsymbol{v}_k \sim N(0, \boldsymbol{R}) vk∼N(0,R)
其中 Q \boldsymbol{Q} Q 是过程噪声的协方差, R \boldsymbol{R} R 是观测噪声的协方差。
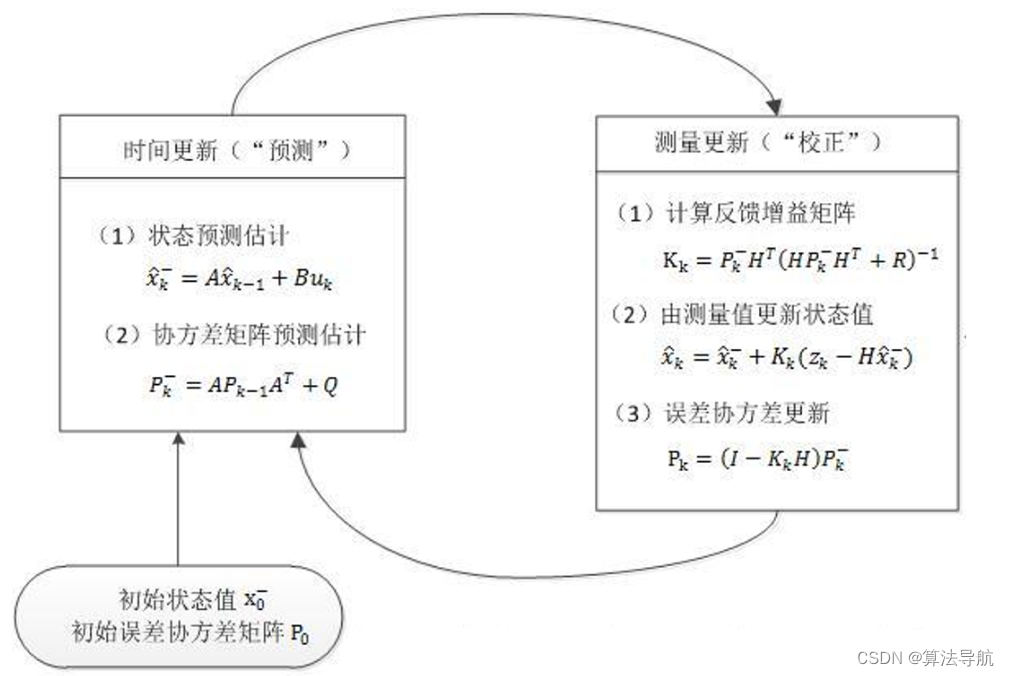
卡尔曼滤波包括预测和更新两步。
(2)预测(先验)
预测是根据上一时刻的状态量,由状态方程预测出下一时刻的状态量 x ^ k − \hat{\boldsymbol{x}}_k^{-} x^k− ,以及状态量误差协方差的先验估计矩阵 P k − \boldsymbol{P}_k^{-} Pk−。这是没有加观测值的。
x ^ k − = A x ^ k − 1 + B u k \hat{\boldsymbol{x}}_k^{-} = \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1}+\boldsymbol{B}\boldsymbol{u}_k x^k−=Ax^k−1+Buk
P k − = A P k − 1 A T + Q \boldsymbol{P}_k^{-}=\boldsymbol{AP}_{k-1}\boldsymbol{A}^T+\boldsymbol{Q} Pk−=APk−1AT+Q
其中, A x ^ k − 1 \boldsymbol{A}\hat{\boldsymbol{x}}_{k-1} Ax^k−1 是上一时刻的最优估计。
(3)更新(后验)
加入观测,对预测值进行更新校正,得到最优后验估计。
首先计算增益矩阵
K k = P k − H T ( H P k − H T + R ) − 1 \boldsymbol{K}_k=\boldsymbol{P}_k^{-}\boldsymbol{H}^T(\boldsymbol{H}\boldsymbol{P}_k^{-}\boldsymbol{H}^T+\boldsymbol{R})^{-1} Kk=Pk−HT(HPk−HT+R)−1
更新状态量及其协方差矩阵
x ^ k = x ^ k − + K k ( z k − H x ^ k − ) \hat{\boldsymbol{x}}_k = \hat{\boldsymbol{x}}_k^{-} + \boldsymbol{K}_k(\boldsymbol{z}_k-\boldsymbol{H}\hat{\boldsymbol{x}}_k^{-}) x^k=x^k−+Kk(zk−Hx^k−)
P k = ( I − K k H ) P k − \boldsymbol{P}_k=(\boldsymbol{I}-\boldsymbol{K}_k\boldsymbol{H})\boldsymbol{P}_k^{-} Pk=(I−KkH)Pk−
14.2 代码实现
以雷达追踪目标为背景,系统的状态方程为
[ x y V x V y a x a y ] k + 1 = [ 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 0.5 δ t 2 0 0 1 0 δ t 0 1 0 0 1 0 δ t 0 0 0 0 1 0 0 0 0 1 0 1 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&\delta_t&0&0.5\delta_t^2&0\\0&1&0&\delta_t&0&0.5\delta_t^2\\0&0&1&0&\delta_t&0\\1&0&0&1&0&\delta_t\\0&0&0&0&1&0\\0&0&0&1&0&1\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k xyVxVyaxay k+1= 100100010000δt010000δt01010.5δt20δt01000.5δt20δt01 xyVxVyaxay k
观测方程
[ x y ] k + 1 = [ 1 0 0 0 0 0 0 1 0 0 0 0 ] [ x y V x V y a x a y ] k \begin{bmatrix}x\\y\end{bmatrix}_{k+1}=\begin{bmatrix}1&0&0&0&0&0\\0&1&0&0&0&0\end{bmatrix}\begin{bmatrix}x\\y\\Vx\\Vy\\ax\\ay\end{bmatrix}_k [xy]k+1=[100100000000] xyVxVyaxay k
/*********************************************************** *
* Time: 2023/11/26
* Author: xiaocong
* Function: 卡尔曼滤波
***********************************************************/
#ifndef KALMANFILTER_H
#define KALMANFILTER_H#include <eigen3/Eigen/Dense>
#include <iostream>using namespace Eigen;
using namespace std;class KalmanFilter
{
public:KalmanFilter(int stateSize, int measSize, int uSize); // 构造函数void init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q); // 初始化void predict(MatrixXd& A);void predict(MatrixXd& A, MatrixXd& B, VectorXd& u); // 重载,针对有控制输入的情况VectorXd update(MatrixXd& H, VectorXd z_meas); // 更新~KalmanFilter(); // 析构函数private:VectorXd x_; // 状态变量VectorXd z_; // 观测变量MatrixXd A_; // 状态转移矩阵MatrixXd B_; // 控制矩阵VectorXd u_; // 控制变量MatrixXd P_; // 状态值的协方差矩阵MatrixXd H_; // 观测矩阵MatrixXd R_; // 观测噪声协方差矩阵MatrixXd Q_; // 过程噪声协方差矩阵
};#endif //KALMANFILTER_H
#include "../inlude/KalmanFilter.h"// 构造函数
KalmanFilter::KalmanFilter(int stateSize, int measSize, int uSize)
{if (stateSize == 0 || measSize == 0){std::cerr << "Error, State size and measurement size must bigger than 0" << endl;}x_.resize(stateSize);x_.setZero();A_.resize(stateSize, stateSize);A_.setIdentity();u_.resize(uSize);u_.setZero();B_.resize(stateSize, uSize);B_.setZero();P_.resize(stateSize, stateSize);P_.setIdentity();H_.resize(measSize, stateSize);H_.setZero();Q_.resize(stateSize, stateSize);Q_.setIdentity();R_.resize(measSize, measSize);R_.setIdentity();
}void KalmanFilter::init(VectorXd& x, MatrixXd& P, MatrixXd& R, MatrixXd& Q)
{x_ = x;P_ = P;R_ = R;Q_ = Q;
}void KalmanFilter::predict(MatrixXd& A) // 没有控制输入u
{A_ = A;x_ = A * x_;P_ = A_ * P_ * A_.transpose() + Q_;
}void KalmanFilter::predict(MatrixXd& A, MatrixXd& B, VectorXd& u) // 有控制输入u
{A_ = A;B_ = B;u_ = u;x_ = A * x_ + B * u_;P_ = A_ * P_ * A_.transpose() + Q_;
}VectorXd KalmanFilter::update(MatrixXd& H, VectorXd z_meas) // 更新
{H_ = H;MatrixXd temp = H_ * P_ * H_.transpose() + R_;MatrixXd K = P_ * H_.transpose() * temp.inverse();x_ = x_ + K * (z_meas - H_ * x_); // 更新 x_kMatrixXd I = MatrixXd::Identity(x_.rows(), x_.rows());P_ = (I - K * H_) * P_;return x_;
}KalmanFilter::~KalmanFilter()
{}
#include "../inlude/KalmanFilter.h"
#include <fstream>#define N 1000
#define T 0.01double data_x[N], data_y[N];// 模型函数
double sample(double x0, double v0, double acc, double t)
{return x0 + v0 * t + 0.5 * acc * t * t;
}double getRand()
{return 0.5 * rand() / RAND_MAX - 0.25; //[-0.25, 0.25)
}int main()
{ofstream fout;fout.open("../data/data.txt");// 生成观测值double t;for (int i = 0; i < N; i++){t = T * i;data_x[i] = sample(0, -4.0, 0.1, t) + getRand();data_y[i] = sample(0.1, 2.0, 0, t) + getRand();}int stateSize = 6;int measSize = 2;int uSize = 0;KalmanFilter kf(stateSize, measSize, uSize);Eigen::MatrixXd A(stateSize, stateSize);A << 1, 0, T, 0, 1 / 2 * T * T, 0,0, 1, 0, T, 0, 1 / 2 * T * T,0, 0, 1, 0, T, 0,0, 0, 0, 1, 0, T,0, 0, 0, 0, 1, 0,0, 0, 0, 0, 0, 1;Eigen::MatrixXd B(0, 0);Eigen::MatrixXd H(measSize, stateSize);H << 1, 0, 0, 0, 0, 0,0, 1, 0, 0, 0, 0;Eigen::MatrixXd P(stateSize, stateSize);P.setIdentity();Eigen::MatrixXd R(measSize, measSize);R.setIdentity() * 0.01;Eigen::MatrixXd Q(stateSize, stateSize);Q.setIdentity() * 0.001;Eigen::VectorXd x(stateSize);Eigen::VectorXd u(0);Eigen::VectorXd z_meas(measSize);z_meas.setZero();Eigen::VectorXd res(stateSize); // 存储预测结果for (int i = 0; i < N; i++){if (i == 0) // 初始值{x << data_x[i], data_y[i], 0, 0, 0, 0;kf.init(x, P, R, Q);continue;}kf.predict(A); // 预测z_meas << data_x[i], data_y[i]; // 观测res << kf.update(H, z_meas); // 更新fout << data_x[i] << " " << data_y[i] << " " << res[0] << " " << res[1] << " " << res[2] << " " << res[3] << " " << res[4] << " " << res[5] << endl;}fout.close();return 0;}
相关文章:
14 卡尔曼滤波及代码实现
文章目录 14 卡尔曼滤波及代码实现14.0 基本概念14.1 公式推导14.2 代码实现 14 卡尔曼滤波及代码实现 14.0 基本概念 卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中的噪声和…...
计算机视觉 图像融合技术概览
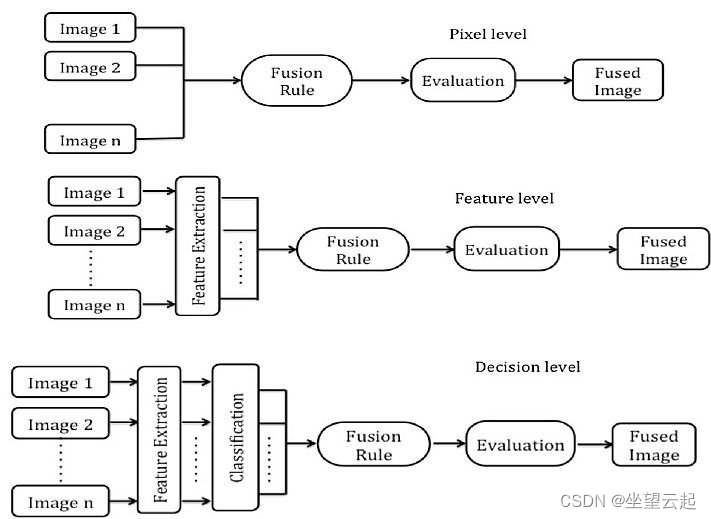
在许多计算机视觉应用中(例如机器人运动和医学成像),需要将来自多幅图像的相关信息集成到一幅图像中。这种图像融合将提供更高的可靠性、准确性和数据质量。 多视图融合可以提高图像的分辨率,同时恢复场景的 3D 表示。多模态融合结合了来自不同传感器的图像,称为多传感器融…...
计算机网络课程实训:局域网方案设计与实现(基于ensp)
文章目录 前言基本要求操作分公司1分公司2总部核心交换机配置实现内部服务器的搭建acl_deny部分用户与服务器出口出口防火墙配置 前言 本篇文章是小编实训部分内容,内容可能会有错误,另外ensp对电脑兼容性及其挑剔,在使用之前一定要安装好。…...
【安全开发】内网扫描器
文章目录 前言现实现的功能较少后序开发会逐步加入简单漏洞探探测和代理功能。 一、开发过程1.项目结构2.main.go3.core模块3.1 scanner.go3.2 service.go 4.bruteforc4.1 bruteforce.go 二、使用步骤 前言 为什么要写这个? fscna被杀的概率太高(哪天二…...
)
ESP32-C3模组上跑通MQTT(5)
接前一篇文章:ESP32-C3模组上跑通MQTT(4) 本文内容参考: 《ESP32-C3 物联网工程开发实战》 一分钟了解MQTT协议 ESP32 MQTT API指南-CSDN博客 ESP-IDF MQTT 示例入门_mqtt outbox-CSDN博客 ESP32用自签CA进行MQTT的TLS双向认证通信_esp32 mqtt ssl-CSDN博客 特此致谢!…...
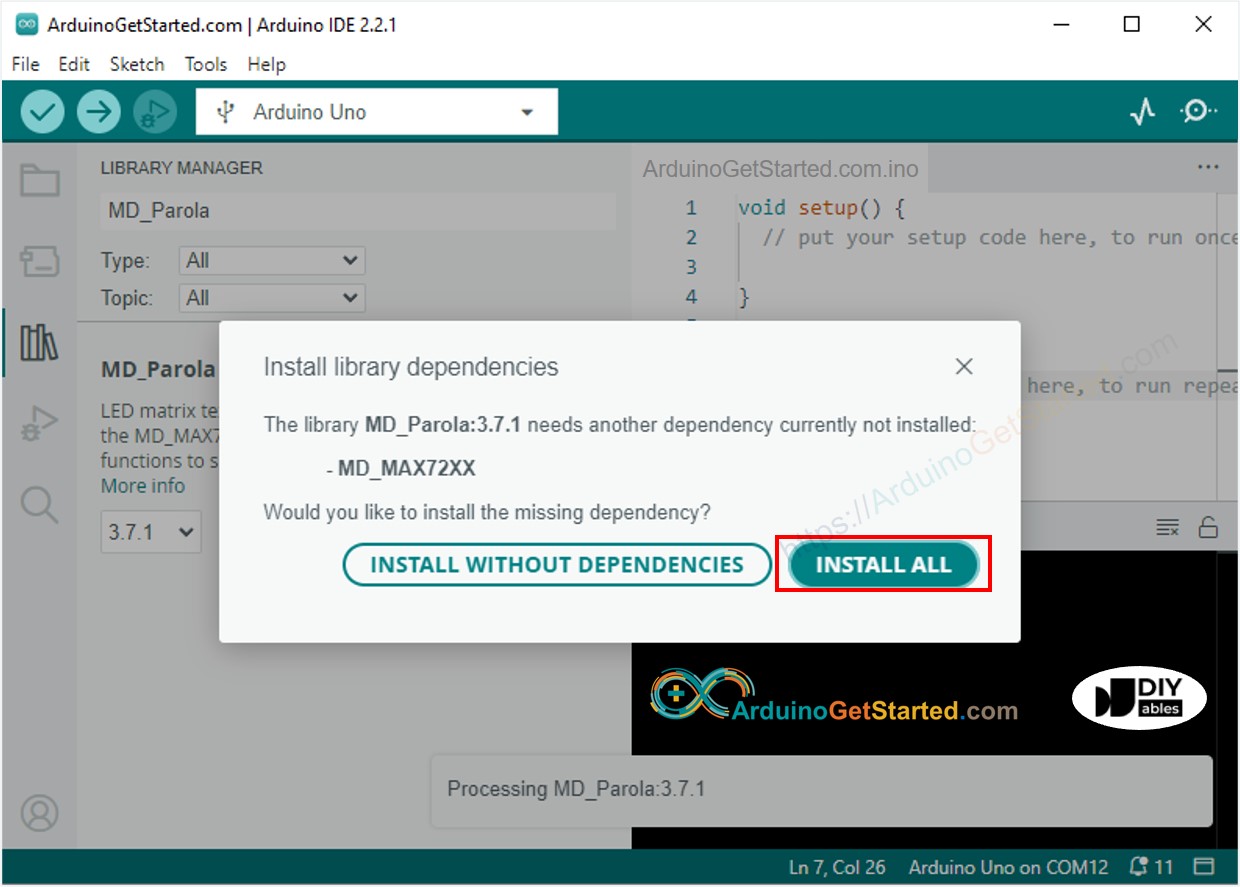
Arduino - LED 矩阵
Arduino - LED 矩阵 Arduino - LED Matrix LED matrix display, also known as LED display, or dot matrix display, are wide-used. In this tutorial, we are going to learn: LED矩阵显示器,也称为LED显示器,或点阵显示器,应用广泛。在…...
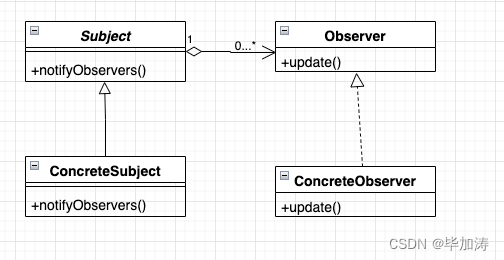
设计模式 - Observer Pattern 观察者模式
文章目录 定义观察者模式的实现构成构成UML图 观察者模式的代码实现场景代码实现 总结优点缺点应用场景 其他设计模式文章: 定义 观察者模式是行为型模式的一种,它定义对象间的一种一对多的依赖关系,使得每当一个对象改变状态,它…...

【面试系列】C++ 高频面试题
欢迎来到我的博客,很高兴能够在这里和您见面!欢迎订阅相关专栏: ⭐️ 全网最全IT互联网公司面试宝典:收集整理全网各大IT互联网公司技术、项目、HR面试真题. ⭐️ AIGC时代的创新与未来:详细讲解AIGC的概念、核心技术、…...

程序猿大战Python——实现简单的图书馆系统操作
步骤1:安装和导入库 首先,确保已经安装了 pymysql 库。如果没有安装,请执行以下命令: pip install pymysql 然后,导入必要的库: import pymysql 步骤2:创建数据库和表的函数 编写一个函数来…...

液体粒子计数器的原理及常见型号选择 lighthouse代理商北京中邦兴业
液体颗粒计数用于测量液体样品中颗粒的大小和分布。通过用激光二极管照射液体样品并检测散射光来测量颗粒分布和尺寸。散射光的性质与粒子大小的大小有关。液体颗粒计数器可用于批量取样或在线(连续监测)应用,如水处理厂,或用于…...

Java知识点整理 16 — Spring Bean
在之前的文章 Java知识点整理 8 — Spring 简介 中介绍了 Spring 的两大核心概念 IoC 和 AOP,但对 Spring Bean 的介绍不全面,本文将补充 Spring 中 Bean 的概念。 一. 什么是 Spring Bean 在 Spring 官方文档中,对 bean 的定义为…...

Nvidia Jetson/RK3588+AI双目立体相机,适合各种割草机器人、扫地机器人、AGV等应用
双目立体视觉是基于视差原理,依据成像设备从不同位置获取的被测物体的图像,匹配对应点的位置偏移,得到视差数据,进而计算物体的空间三维信息。为您带来高图像质量的双目立体相机,具有高分辨率、低功耗、远距离等优点&a…...

springboot使用feign调用不依赖cloud
在使用spring boot调用第三方api中,常用的是okhttp、apache http client等,但是直接使用下来还是有点繁琐,需要手动转换实体。 在springcloud中有个openfeign调用,第一次体验到调用接口还能这么丝滑。注解写道接口上,…...
springboot中使用springboot cache
前言:SpringBoot中使用Cache缓存可以提高对缓存的开发效率 此图片是SpringBootCache常用注解 Springboot Cache中常用注解 第一步:引入依赖 <!--缓存--><dependency><groupId>org.springframework.boot</groupId><artifactId…...

Promise,async/await的运用
一,了解Promise Promise是异步编程的一种解决方案,它是一个对象,可以获取异步操作的消息,它的出现避免了地狱回调。 (1)Promise的实例有三个状态: Pending(进行中) Re…...

图论·多源最短路径Floyddijsktra
例题地址 多源最短路径 多个源点多个终点可以使用Floyd算法直接求各源点到终点的最短距离,也可以直接多次使用dijsktra算法求单源点到终点的最短距离 Floyd算法 使用条件 多源最短路径权值正负皆可 核心思想:动态规划 子问题: 设(A,B)…...
微服务 | Springboot整合GateWay+Nacos实现动态路由
1、简介 路由转发 执行过滤器链。 网关,旨在为微服务架构提供一种简单有效的统一的API路由管理方式。同时,基于Filter链的方式提供了网关的基本功能,比如:鉴权、流量控制、熔断、路径重写、黑白名单、日志监控等。 基本功能…...

做google SEO 有哪些好用的工具?这12款谷歌SEO工具值得收藏!
1、Google Trends 谷歌旗下一款基于搜索数据推出的一款免费分析工具 外贸人有句老话,七分靠选品,三分靠运营。在你开始做独立站之前,在你不清楚你的行业在Google上面能否有足够的流量时,那么Google Trends则是你最好的工具。 你只…...

【变频调速在锅炉引风机控制中的应用】
变频调速在锅炉引风机控制中的应用 变频器的选型 变频器是利用电力半导体器件的通断作用将工频电源变换为另一种频率的电能控制装置,能宏观对交流异步电机软启动,变频调速,提高运转精度,改变功率因数,过流/过压/过载保护等功能,国内技术较领先的品牌有汇川、欧瑞(原烟台…...

网络配置(IP、NETMASK、GATEWAY、DNS、DHCP) <持续更新中>
参考: 初学Linux之网络配置(IP、NETMASK、GATEWAY、DNS、DHCP)-CSDN博客【学习笔记】网关 & 路由_网关和路由-CSDN博客【学习笔记】计算机网络 IP地址与MAC地址_根据mac分配ip-CSDN博客【学习笔记】TCP 和 UDP 协议_tcp 发送 syn 应答没有syn ack-CSDN博客 一…...
idea大量爆红问题解决
问题描述 在学习和工作中,idea是程序员不可缺少的一个工具,但是突然在有些时候就会出现大量爆红的问题,发现无法跳转,无论是关机重启或者是替换root都无法解决 就是如上所展示的问题,但是程序依然可以启动。 问题解决…...
(二)TensorRT-LLM | 模型导出(v0.20.0rc3)
0. 概述 上一节 对安装和使用有个基本介绍。根据这个 issue 的描述,后续 TensorRT-LLM 团队可能更专注于更新和维护 pytorch backend。但 tensorrt backend 作为先前一直开发的工作,其中包含了大量可以学习的地方。本文主要看看它导出模型的部分&#x…...

Golang dig框架与GraphQL的完美结合
将 Go 的 Dig 依赖注入框架与 GraphQL 结合使用,可以显著提升应用程序的可维护性、可测试性以及灵活性。 Dig 是一个强大的依赖注入容器,能够帮助开发者更好地管理复杂的依赖关系,而 GraphQL 则是一种用于 API 的查询语言,能够提…...
全球首个30米分辨率湿地数据集(2000—2022)
数据简介 今天我们分享的数据是全球30米分辨率湿地数据集,包含8种湿地亚类,该数据以0.5X0.5的瓦片存储,我们整理了所有属于中国的瓦片名称与其对应省份,方便大家研究使用。 该数据集作为全球首个30米分辨率、覆盖2000–2022年时间…...
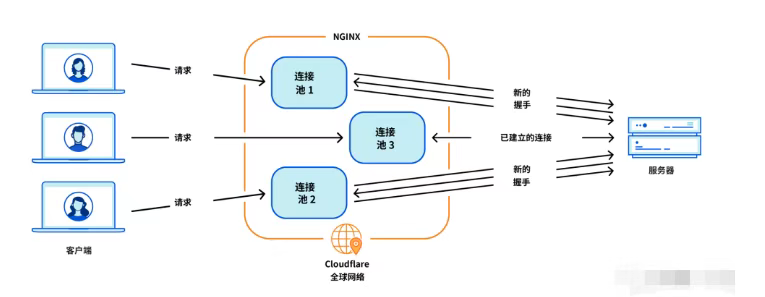
Cloudflare 从 Nginx 到 Pingora:性能、效率与安全的全面升级
在互联网的快速发展中,高性能、高效率和高安全性的网络服务成为了各大互联网基础设施提供商的核心追求。Cloudflare 作为全球领先的互联网安全和基础设施公司,近期做出了一个重大技术决策:弃用长期使用的 Nginx,转而采用其内部开发…...

linux 下常用变更-8
1、删除普通用户 查询用户初始UID和GIDls -l /home/ ###家目录中查看UID cat /etc/group ###此文件查看GID删除用户1.编辑文件 /etc/passwd 找到对应的行,YW343:x:0:0::/home/YW343:/bin/bash 2.将标红的位置修改为用户对应初始UID和GID: YW3…...
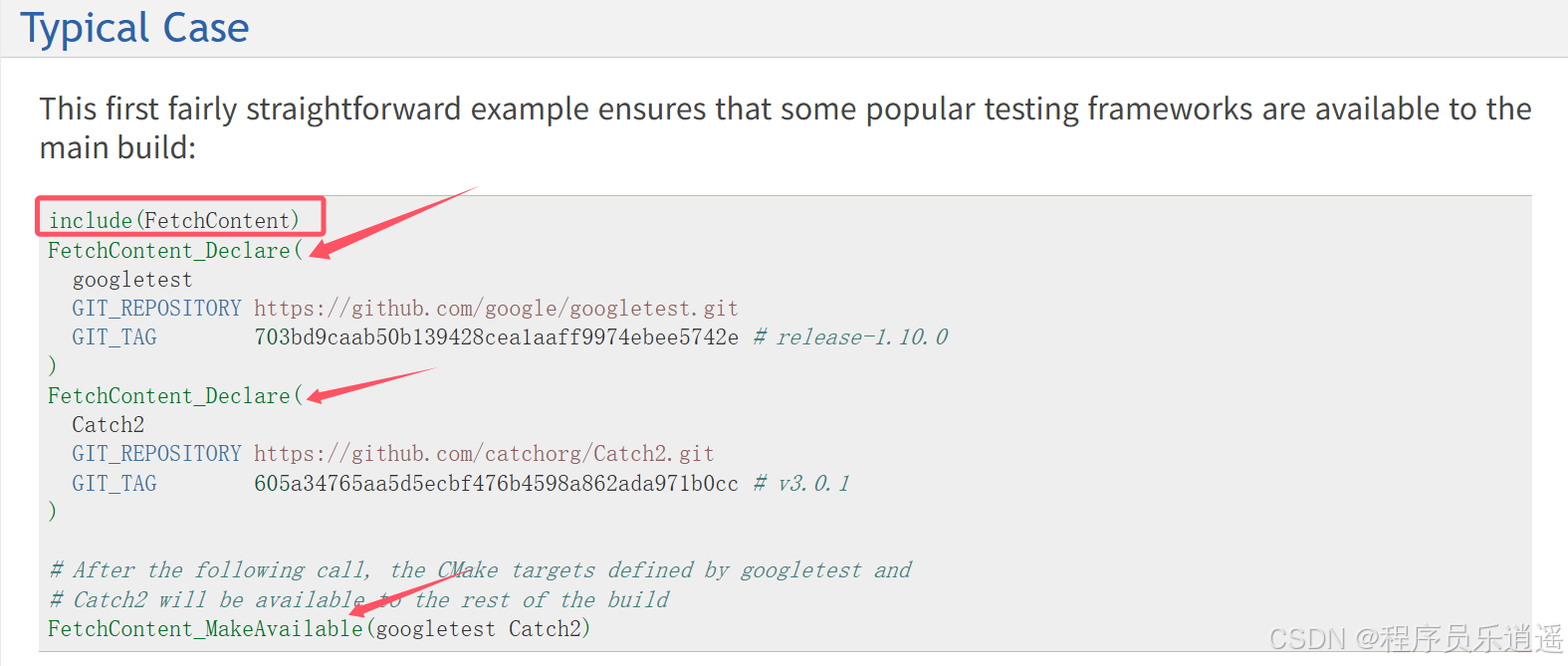
CMake 从 GitHub 下载第三方库并使用
有时我们希望直接使用 GitHub 上的开源库,而不想手动下载、编译和安装。 可以利用 CMake 提供的 FetchContent 模块来实现自动下载、构建和链接第三方库。 FetchContent 命令官方文档✅ 示例代码 我们将以 fmt 这个流行的格式化库为例,演示如何: 使用 FetchContent 从 GitH…...
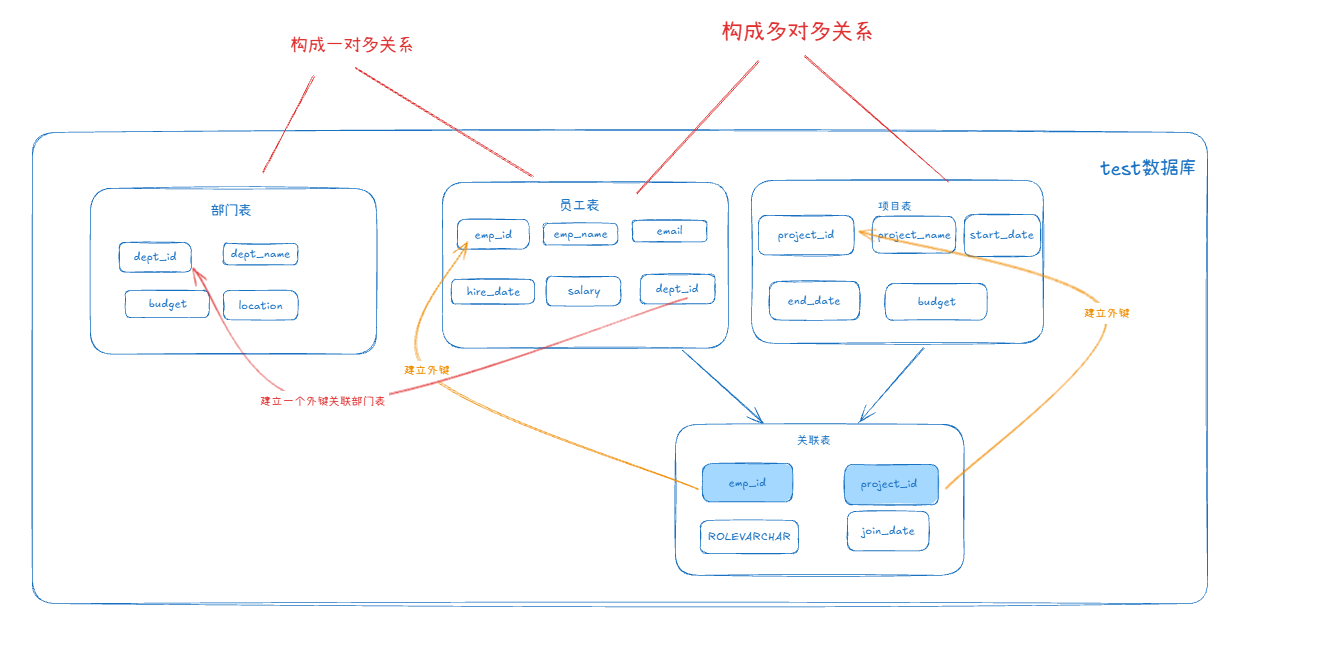
MySQL 知识小结(一)
一、my.cnf配置详解 我们知道安装MySQL有两种方式来安装咱们的MySQL数据库,分别是二进制安装编译数据库或者使用三方yum来进行安装,第三方yum的安装相对于二进制压缩包的安装更快捷,但是文件存放起来数据比较冗余,用二进制能够更好管理咱们M…...

比较数据迁移后MySQL数据库和OceanBase数据仓库中的表
设计一个MySQL数据库和OceanBase数据仓库的表数据比较的详细程序流程,两张表是相同的结构,都有整型主键id字段,需要每次从数据库分批取得2000条数据,用于比较,比较操作的同时可以再取2000条数据,等上一次比较完成之后,开始比较,直到比较完所有的数据。比较操作需要比较…...

Spring Security 认证流程——补充
一、认证流程概述 Spring Security 的认证流程基于 过滤器链(Filter Chain),核心组件包括 UsernamePasswordAuthenticationFilter、AuthenticationManager、UserDetailsService 等。整个流程可分为以下步骤: 用户提交登录请求拦…...