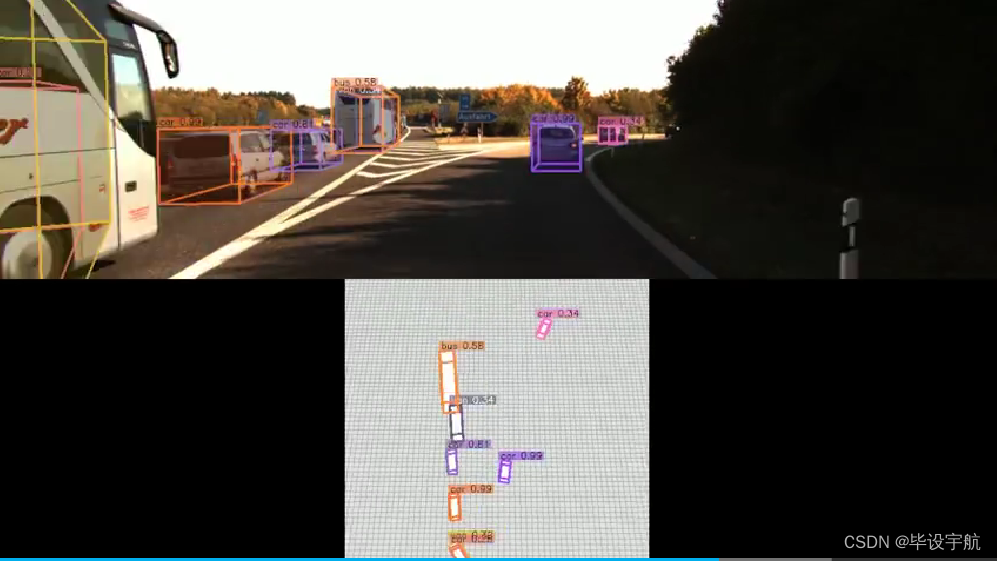
Omni3D目标检测
Omni3D是一个针对现实场景中的3D目标检测而构建的大型基准和模型体系。该项目旨在推动从单一图像中识别3D场景和物体的能力,这对于计算机视觉领域而言是一个长期的研究目标,并且在机器人、增强现实(AR)、虚拟现实(VR)以及其他需要精确定位和理解3D环境中物体的应用中尤为重要。
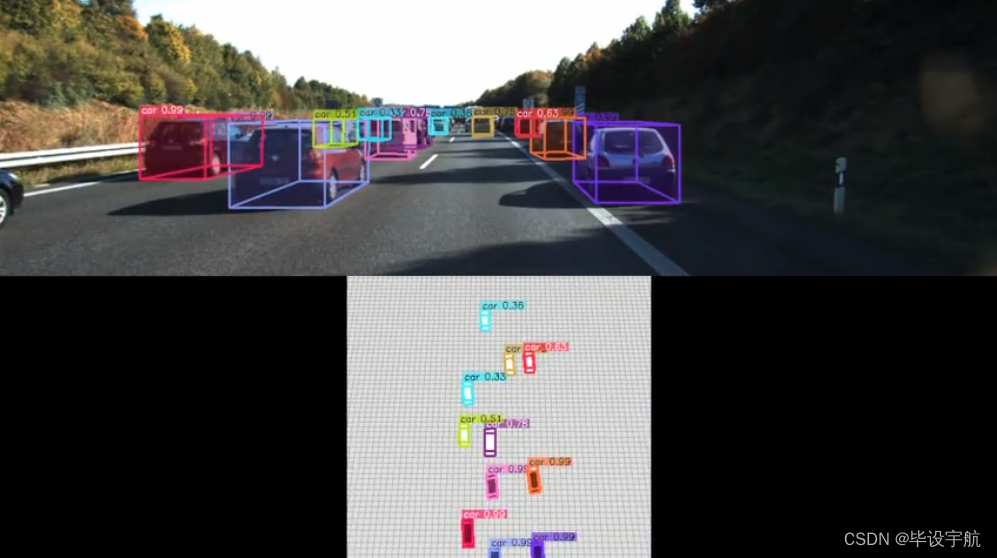
根据场景分为室内、室外、室内和室外统一模型:
关键特点:
-
综合性基准:Omni3D提供了一个广泛的基准测试集,覆盖了多种环境条件和场景类型,包括但不限于室内、室外、城市、乡村等,这有助于评估和比较不同3D目标检测算法的性能。
-
多样化数据:数据集中包含了丰富的标注信息,如3D边界框、类别标签、尺寸和姿态信息,使得研究人员能够在真实复杂场景下训练和测试他们的算法。

-
模型与算法:除了数据集,Omni3D可能还伴随着一些先进的3D目标检测模型,这些模型利用深度学习技术,在统一的框架下展示最新的研究成果。例如,提及的“UniMODE”就是一个试图统一室内和室外单目3D目标检测的模型,它在Omni3D基准上展示了先进水平的性能。
-
促进研究与应用:通过提供这样一套标准化的工具和资源,Omni3D促进了3D视觉领域的研究交流,帮助研究者们快速迭代和优化算法,同时也为实际应用提供了可行的技术参考。
应用前景:
-
自动驾驶汽车:准确检测和识别道路上的障碍物对于自动驾驶安全至关重要。
-
无人机导航与监控:在执行搜索救援或环境监测任务时,无人机需要理解其周围环境的3D结构。
-
AR/VR内容创建:为了提供更加沉浸式的体验,AR/VR应用需要实时感知并理解用户周围的3D空间。
-
机器人操作与物流:在仓库自动化或家庭服务机器人场景中,3D目标检测可以提高物品抓取、搬运的精度和效率。
综上所述,Omni3D作为一个全面的3D目标检测平台,不仅推动了技术进步,也为跨领域的实际应用铺平了道路。


安装:
# setup new evironment
conda create -n cubercnn python=3.8
source activate cubercnn# main dependencies
conda install -c fvcore -c iopath -c conda-forge -c pytorch3d -c pytorch fvcore iopath pytorch3d pytorch=1.8 torchvision=0.9.1 cudatoolkit=10.1# OpenCV, COCO, detectron2
pip install cython opencv-python
pip install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
python -m pip install detectron2 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.8/index.html# other dependencies
conda install -c conda-forge scipy seaborn运行:
## for outdoor
python demo/demo.py \
--config-file ./configs/cubercnn_DLA34_FPN_out.yaml \
--input-folder "/home/spurs/dataset/2011_10_03/2011_10_03_drive_0047_sync/image_02/data" \
--threshold 0.25 --display \
MODEL.WEIGHTS ./cubercnn_DLA34_FPN_outdoor.pth \
OUTPUT_DIR output/demo## for indoor
python demo/demo.py \
--config-file ./configs/cubercnn_DLA34_FPN_in.yaml \
--input-folder "/home/spurs/dataset/2011_10_03/2011_10_03_drive_0047_sync/image_02/data" \
--threshold 0.25 --display \
MODEL.WEIGHTS ./cubercnn_DLA34_FPN_indoor.pth \
OUTPUT_DIR output/demo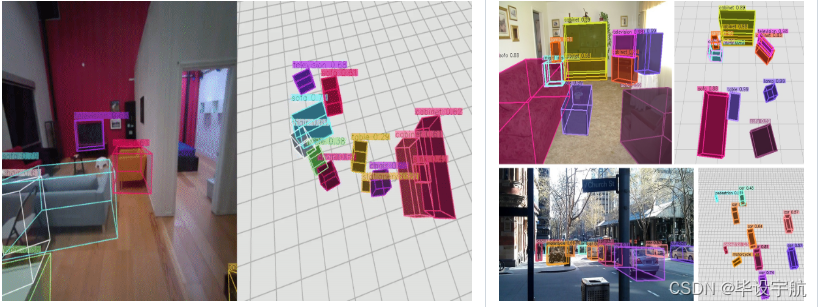
安装:
# setup new evironment
conda create -n cubercnn python=3.8
source activate cubercnn# main dependencies
conda install -c fvcore -c iopath -c conda-forge -c pytorch3d -c pytorch fvcore iopath pytorch3d pytorch=1.8 torchvision=0.9.1 cudatoolkit=10.1# OpenCV, COCO, detectron2
pip install cython opencv-python
pip install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
python -m pip install detectron2 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.8/index.html# other dependencies
conda install -c conda-forge scipy seabornFor reference, we used and for our experiments. We expect that slight variations in versions are also compatible.cuda/10.1cudnn/v7.6.5.32\
示例:To run the Cube R-CNN demo on a folder of input images using our model trained on the full Omni3D dataset,DLA34
# Download example COCO images
sh demo/download_demo_COCO_images.sh# Run an example demo
python demo/demo.py \
--config-file cubercnn://omni3d/cubercnn_DLA34_FPN.yaml \
--input-folder "datasets/coco_examples" \
--threshold 0.25 --display \
MODEL.WEIGHTS cubercnn://omni3d/cubercnn_DLA34_FPN.pth \
OUTPUT_DIR output/demo We train on 48 GPUs using submitit which wraps the following training command,
python tools/train_net.py \--config-file configs/Base_Omni3D.yaml \OUTPUT_DIR output/omni3d_example_runNote that our provided configs specify hyperparameters tuned for 48 GPUs. You could train on 1 GPU (though with no guarantee of reaching the final performance) as follows,
python tools/train_net.py \--config-file configs/Base_Omni3D.yaml --num-gpus 1 \SOLVER.IMS_PER_BATCH 4 SOLVER.BASE_LR 0.0025 \SOLVER.MAX_ITER 5568000 SOLVER.STEPS (3340800, 4454400) \SOLVER.WARMUP_ITERS 174000 TEST.EVAL_PERIOD 1392000 \VIS_PERIOD 111360 OUTPUT_DIR output/omni3d_example_runThe evaluator relies on the detectron2 MetadataCatalog for keeping track of category names and contiguous IDs. Hence, it is important to set these variables appropriately.
# (list[str]) the category names in their contiguous order
MetadataCatalog.get('omni3d_model').thing_classes = ... # (dict[int: int]) the mapping from Omni3D category IDs to the contiguous order
MetadataCatalog.get('omni3d_model').thing_dataset_id_to_contiguous_id = ...In summary, the evaluator expects a list of image-level predictions in the format of:
{"image_id": <int> the unique image identifier from Omni3D,"K": <np.array> 3x3 intrinsics matrix for the image,"width": <int> image width,"height": <int> image height,"instances": [{"image_id": <int> the unique image identifier from Omni3D,"category_id": <int> the contiguous category prediction IDs, which can be mapped from Omni3D's category ID's usingMetadataCatalog.get('omni3d_model').thing_dataset_id_to_contiguous_id"bbox": [float] 2D box as [x1, y1, x2, y2] used for IoU2D,"score": <float> the confidence score for the object,"depth": <float> the depth of the center of the object,"bbox3D": list[list[float]] 8x3 corner vertices used for IoU3D,}...]
}Please use the following BibTeX entry if you use Omni3D and/or Cube R-CNN in your research or refer to our results.
@inproceedings{brazil2023omni3d,author = {Garrick Brazil and Abhinav Kumar and Julian Straub and Nikhila Ravi and Justin Johnson and Georgia Gkioxari},title = {{Omni3D}: A Large Benchmark and Model for {3D} Object Detection in the Wild},booktitle = {CVPR},address = {Vancouver, Canada},month = {June},year = {2023},organization = {IEEE},
}相关文章:
Omni3D目标检测
Omni3D是一个针对现实场景中的3D目标检测而构建的大型基准和模型体系。该项目旨在推动从单一图像中识别3D场景和物体的能力,这对于计算机视觉领域而言是一个长期的研究目标,并且在机器人、增强现实(AR)、虚拟现实(VR&a…...
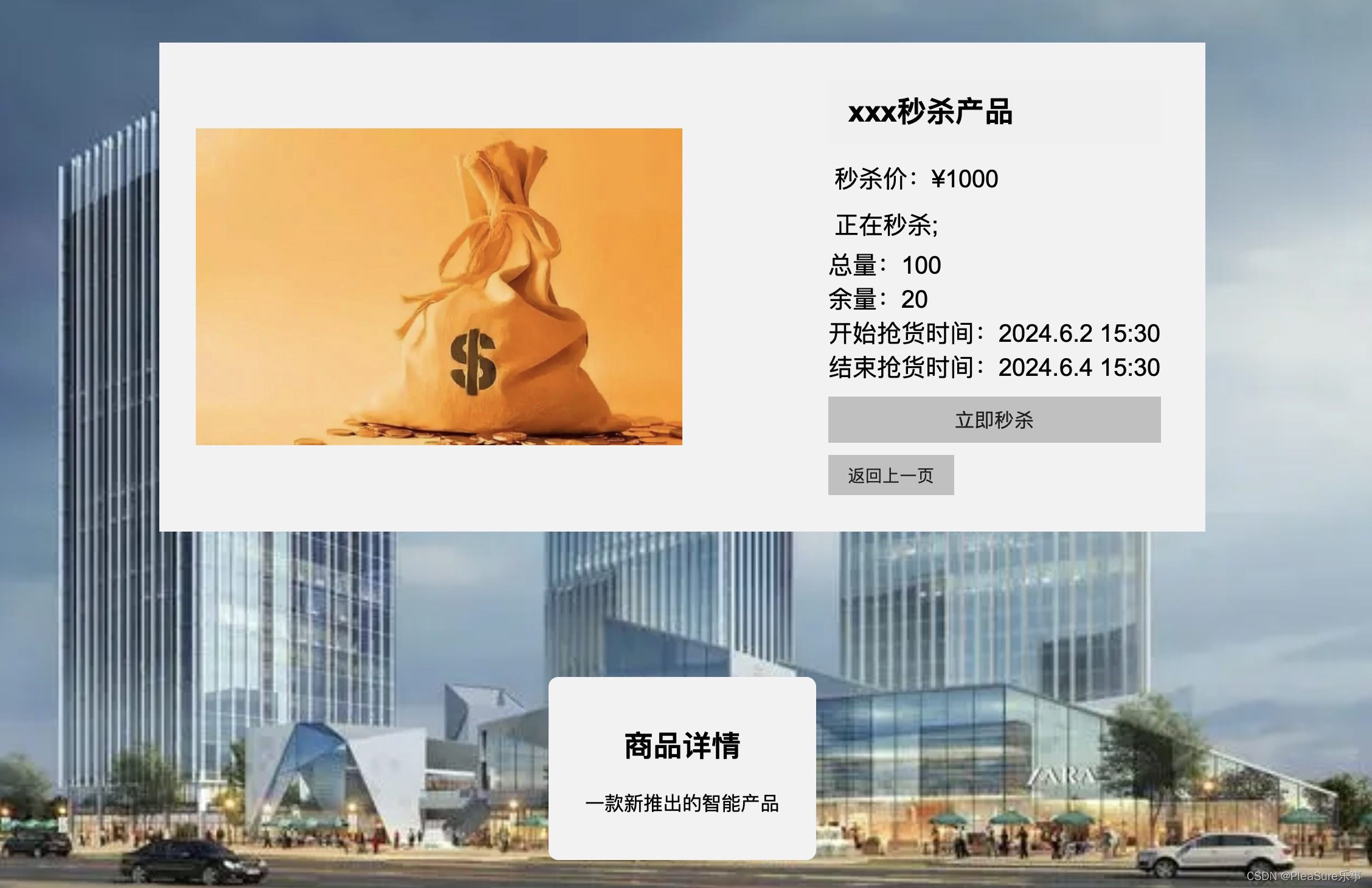
前端三件套开发模版——产品介绍页面
今天有空,使用前端三件套html、css、js制作了一个非常简单的产品制作页面,与大家分享,希望可以满足大家应急的需求。本页面可以对产品进行“抢购”、对产品进行介绍,同时可以安排一张产品的高清大图,我也加入了页面的背…...

Android Bitmap 和Drawable的区别
Bitmap 和 Drawable 是 Android 图形绘制的两种常用方式,它们有各自的特点和使用场景。下面将详细解释它们之间的区别,并通过示例代码说明如何使用它们。 Bitmap 解释 Bitmap 是一种用于存储图像像素数据的类,通常用于图像处理和操作。Bit…...

Linux和windows网络配置文件的修改
Linux和windows网络配置文件的修改 网络配置文件是计算机网络管理中至关重要的一部分。正确配置网络文件可以确保计算机与网络设备之间的通信顺畅,避免网络故障。本文将详细介绍网络配置文件的修改方法,包括常见命令、使用方法举例,以及一些…...

【.NET全栈】第16章 Web开发
文章目录 前言16.1 HTML概述16.1.1 HTML的基本概念16.1.2 HTML语言的基本元素16.1.3 格式设置16.1.4 超级链接16.1.5 图像16.1.6 表格16.1.7 框架16.1.8 表单 16.2 ASP.NET Web Forms的组织16.2.1 认识ASP.NET16.2.2 Web Forms的组织 16.3 Web服务器控件16.3.1 使用Label和Text…...
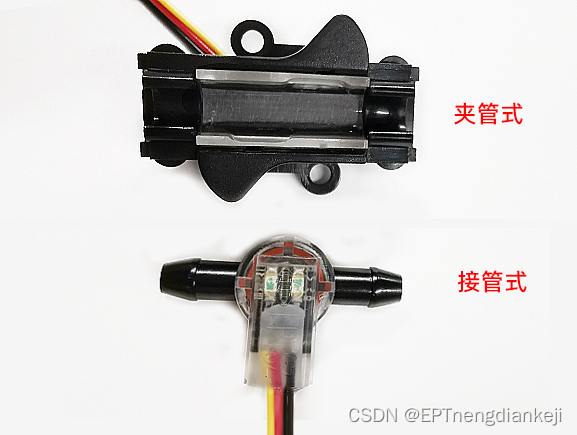
检测水管缺水的好帮手-管道光电液位传感器
管道光电液位传感器是现代清水管道管理中的重要技术创新,不仅提高了检测液位的精确度,还解决了传统机械式和电容式传感器存在的诸多问题,成为检测管道缺水的可靠利器。 该传感器采用先进的光学感应原理,利用红外光学组件通过精密…...

渗透测试流程基本八个步骤
渗透测试遵循软件测试的基本流程,但由于其测试过程与目标的特殊性,在具体实现步骤上渗透测试与常见软件测试并不相同。渗透测试流程主要包括8个步骤,如下图所示: 下面结合上图介绍每一个步骤所要完成的任务。 (1 )明确目标 当测…...

2024年移动手游趋势:休闲类手游收入逆势增长,欧美玩家成为主力
移动手游广告情报平台Sensor Tower近期发布的报告显示,从宏观数据来看,尽管2023年对于移动游戏市场来说是艰难的一年,无论是总下载量亦或是总收入都较去年有所下降,尤其是Google Play。但在总体下降的大趋势下,休闲游戏…...

npm 淘宝镜像证书过期,错误信息 Could not retrieve https://npm.taobao.org/mirrors/node/latest
更换 npm 证书 问题描述报错原因更换步骤1 找到 nvm 安装目录2 发现证书过期3 更换新地址4 保存后,重新安装成功 问题描述 在使用 nvm 安装新版本时,未成功,出现报错: Could not retrieve https://npm.taobao.org/mirrors/node/l…...

axios发送请求,后端无法获取cookie
1.前端 axios默认不携带cookie 添加如下代码 import axios from "axios" const requrst axios.create({baseURL: import.meta.env.VITE_APP_URL,timeout: 5000,}) //让axios携带cookie requrst.defaults.withCredentials true 2.后端nestjs main.ts app.enabl…...
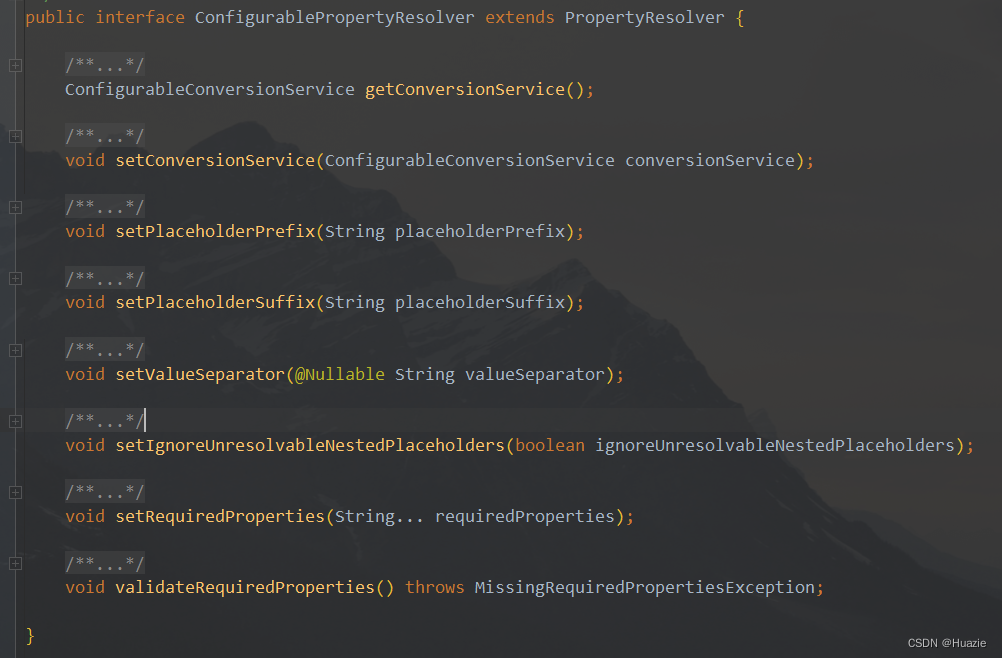
【Spring Boot 源码学习】初识 ConfigurableEnvironment
《Spring Boot 源码学习系列》 初识 ConfigurableEnvironment 一、引言二、主要内容2.1 Environment2.1.1 配置文件(profiles)2.1.2 属性(properties) 2.2 ConfigurablePropertyResolver2.2.1 属性类型转换配置2.2.2 占位符配置2.…...

开关电源中强制连续FCCM模式与轻载高效PSM,PFM模式优缺点对比笔记
文章目录 前言一、连续FCCM模式优点:缺点: 二,轻载高效PSM,PFM优点:缺点: 总结 前言 今天我们来学习下开关电源中,强制连续FCCM模式与轻载高效PSM,PFM模式优缺点对比 一、连续FCCM模式 优点: …...
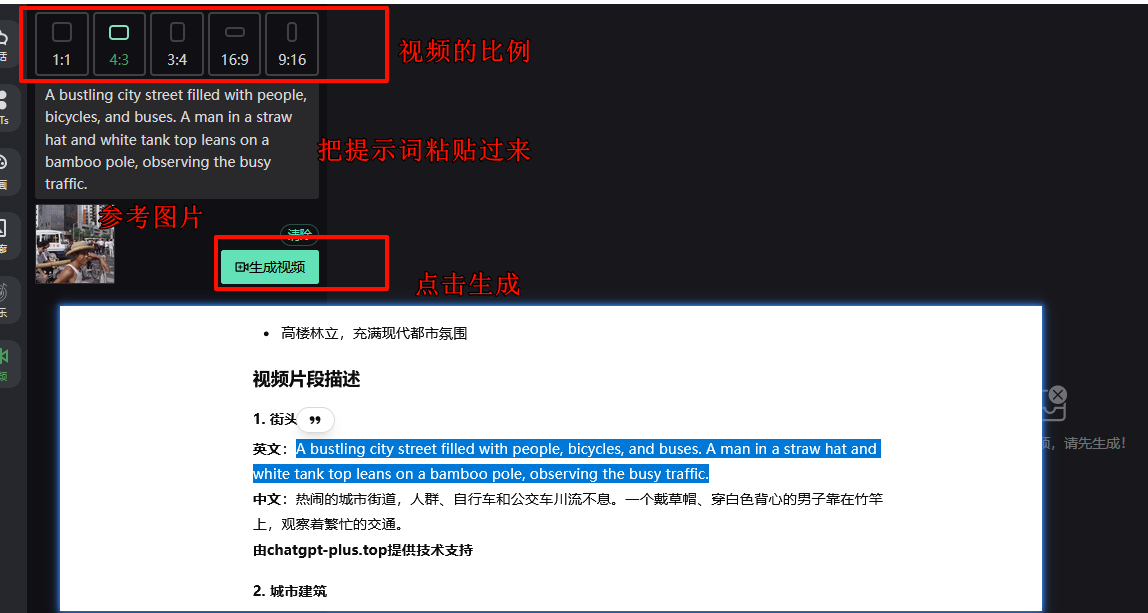
5分钟教你用AI把老照片动起来,别再去花49块9的冤枉钱了
文章目录 需要的工具 最近,AI视频在各大平台上,又火了。 只是火的形式,变成了将老照片动起来,打情感牌,或者做很多经典电视剧的再整活。 直接把可灵的生成时间,从以前的4分钟,生生的干成了20分钟…...

Ruby 环境变量
Ruby 环境变量 概述 环境变量在编程中扮演着重要的角色,尤其是在Ruby这样的动态编程语言中。它们是操作系统用来存储有关其操作环境的信息的变量,可以在程序运行时影响其行为。Ruby程序可以通过环境变量来获取配置信息、系统细节或用户特定的设置。本文将深入探讨Ruby中环境…...
认知)
BPF:BCC工具 funccount 统计内核函数调用(内核函数、跟踪点USDT探针)认知
写在前面 博文内容涉及BCC工具 funccount 认知funccount 可以帮助用户追踪和分析Linux系统上特定函数、系统探针或USDT探针的运行次数。这对于性能分析、故障排查和系统优化等场景非常有用。理解不足小伙伴帮忙指正 😃,生活加油 不必太纠结于当下,也不必…...

DPO算法推导
DPO 核心思想:直接使用偏好数据进行策略优化,省去 reward 模型策略优化。 技术背景知识: 首先给定prompt x,生成两个答案 ( y 1 , y 2 ) Π S F T ( y ∣ x ) (y_1,y_2)~\Pi^{SFT}(y|x) (y1,y2) ΠSFT(y∣x) ,并通…...
Qt源码分析:窗体绘制与响应
作为一套开源跨平台的UI代码库,窗体绘制与响应自然是最为基本的功能。在前面的博文中,已就Qt中的元对象系统(反射机制)、事件循环等基础内容进行了分析,并捎带阐述了窗体响应相关的内容。因此,本文着重分析Qt中窗体绘制相关的内容…...

docker 安装 禅道
docker pull hub.zentao.net/app/zentao:20.1.1 sudo docker network create --subnet172.172.172.0/24 zentaonet 使用 8087端口号访问 使用禅道mysql 映射到3307 sudo docker run \ --name zentao2 \ -p 8087:80 \ -p 3307:3306 \ --networkzentaonet \ --ip 172.172.172.…...

【简要说说】make 增量编译的原理
make 增量编译的原理 make是一个工具,它可以根据依赖关系和时间戳来自动执行编译命令。 当您修改了源代码文件后,make会检查它们的修改时间是否比目标文件(如可执行文件或目标文件)新,如果是,就会重新编译…...
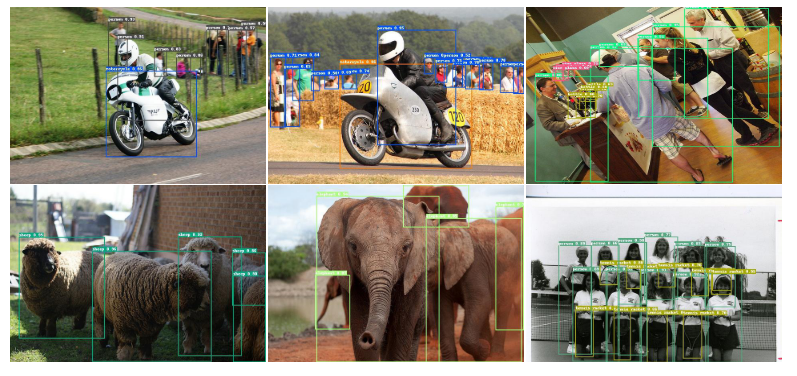
DETRs Beat YOLOs on Real-time Object Detection论文翻译
cvpr 2024 论文名称 DETRs在实时目标检测上击败YOLO 地址 https://arxiv.longhoe.net/abs/2304.08069 代码 https://github.com/lyuwenyu/RT-DETR 目录 摘要 1介绍 2.相关工作 2.1实时目标探测器 2.2.端到端物体探测器 3.检测器的端到端速度 3.1.NMS分析 3.2.端到端速度…...
)
浏览器访问 AWS ECS 上部署的 Docker 容器(监听 80 端口)
✅ 一、ECS 服务配置 Dockerfile 确保监听 80 端口 EXPOSE 80 CMD ["nginx", "-g", "daemon off;"]或 EXPOSE 80 CMD ["python3", "-m", "http.server", "80"]任务定义(Task Definition&…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...
C++实现分布式网络通信框架RPC(3)--rpc调用端
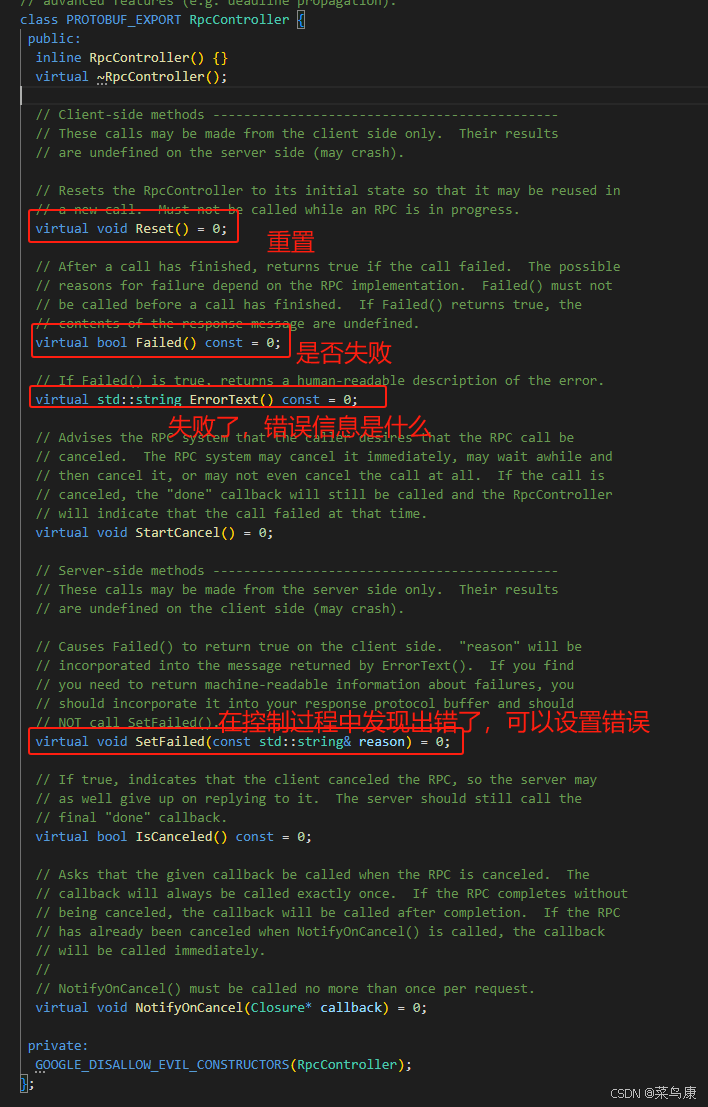
目录 一、前言 二、UserServiceRpc_Stub 三、 CallMethod方法的重写 头文件 实现 四、rpc调用端的调用 实现 五、 google::protobuf::RpcController *controller 头文件 实现 六、总结 一、前言 在前边的文章中,我们已经大致实现了rpc服务端的各项功能代…...

转转集团旗下首家二手多品类循环仓店“超级转转”开业
6月9日,国内领先的循环经济企业转转集团旗下首家二手多品类循环仓店“超级转转”正式开业。 转转集团创始人兼CEO黄炜、转转循环时尚发起人朱珠、转转集团COO兼红布林CEO胡伟琨、王府井集团副总裁祝捷等出席了开业剪彩仪式。 据「TMT星球」了解,“超级…...

Ascend NPU上适配Step-Audio模型
1 概述 1.1 简述 Step-Audio 是业界首个集语音理解与生成控制一体化的产品级开源实时语音对话系统,支持多语言对话(如 中文,英文,日语),语音情感(如 开心,悲伤)&#x…...
用docker来安装部署freeswitch记录
今天刚才测试一个callcenter的项目,所以尝试安装freeswitch 1、使用轩辕镜像 - 中国开发者首选的专业 Docker 镜像加速服务平台 编辑下面/etc/docker/daemon.json文件为 {"registry-mirrors": ["https://docker.xuanyuan.me"] }同时可以进入轩…...
并发编程 - go版
1.并发编程基础概念 进程和线程 A. 进程是程序在操作系统中的一次执行过程,系统进行资源分配和调度的一个独立单位。B. 线程是进程的一个执行实体,是CPU调度和分派的基本单位,它是比进程更小的能独立运行的基本单位。C.一个进程可以创建和撤销多个线程;同一个进程中…...

Spring AI Chat Memory 实战指南:Local 与 JDBC 存储集成
一个面向 Java 开发者的 Sring-Ai 示例工程项目,该项目是一个 Spring AI 快速入门的样例工程项目,旨在通过一些小的案例展示 Spring AI 框架的核心功能和使用方法。 项目采用模块化设计,每个模块都专注于特定的功能领域,便于学习和…...
Android屏幕刷新率与FPS(Frames Per Second) 120hz
Android屏幕刷新率与FPS(Frames Per Second) 120hz 屏幕刷新率是屏幕每秒钟刷新显示内容的次数,单位是赫兹(Hz)。 60Hz 屏幕:每秒刷新 60 次,每次刷新间隔约 16.67ms 90Hz 屏幕:每秒刷新 90 次,…...

【Redis】Redis从入门到实战:全面指南
Redis从入门到实战:全面指南 一、Redis简介 Redis(Remote Dictionary Server)是一个开源的、基于内存的键值存储系统,它可以用作数据库、缓存和消息代理。由Salvatore Sanfilippo于2009年开发,因其高性能、丰富的数据结构和广泛的语言支持而广受欢迎。 Redis核心特点:…...