【从零开始实现stm32无刷电机FOC】【理论】【3/6 位置、速度、电流控制】
目录
- PID控制
- 滤波
- 单独位置控制
- 单独速度控制
- 单独电流控制
- 位置-速度-电流串级控制
上一节,通过对SVPWM的推导,我们获得了控制电机转子任意受力的能力。本节,我们选用上节得到的转子dq轴解耦的SVPWM形式,对转子受力进行合理控制,实现FOC电机控制的最终目标:位置、速度、电流控制。
PID控制
看到本节的人,大概率是了解PID(Proportional比例,Integral积分,Derivative微分)控制的,也是本人能力所限,在此不进行完整讲解,也不涉及高级控制方法。
不管是电机的位置还是速度还是电流,都可以视为被控参数。
从直观想法上,当一个被控参数实时值小于目标值时,需要施加外力使被控参数提高。如果施加的外力过大,被控参数会被超调,导致被控参数在目标值附近的振荡幅度越来大;如果施加的外力过小,参数到达目标值的速度又太慢。因此需要得到一个合适的外力,使得被控参数既不会振荡越来越剧烈,调节速度也不会太慢。从这个直观的控制想法就是PID中的P。单纯使用P控制时,设置外力大小=被控参数与目标值的差距*P系数,所谓差距越大施加的外力越大,是很直观的。如果P系数设置的比较小,虽然被控参数不会一直振荡了,可以慢慢稳定到目标值了,但是调节速度太慢了,此时可以加入PID的D控制,使得原先振荡的被控参数快速收缩到目标值。
再从直观想法上去思考D控制,纯P控制下被控参数靠近以及掠过目标值时,一个与速度反方向的纠偏力有助于被控参数在目标值附近产生制动,让被控参数更快地收缩到目标值。这个与速度反方向的纠偏力就是D控制。加入D控制后,控制外力大小=被控参数与目标值的差距*P系数+被控参数速度*D系数。当纯D控制时,由于初始状态下被控参数的速度为0 ,被控参数不会得到外力,由此也可以看出,P控制是提供外力的,D控制是约束外力的。如果D系数选择过大,则轻微的速度就能够引起巨大的外力;如果D系数选择过小,则不足以约束P控制生产的外力,被控参数稳定就慢。
还是从直观想法上去思考I控制,当被控参数存在负载时,单纯的P控制提供的外力可能不足以支撑这个负载,因此可以加上这样一个机制,把被控参数与目标值差距随着时间累计起来,这样就能得到存在负载时被控参数到达目标值所需的动力了。这个机制就是I控制。加入I控制后,控制外力大小=被控参数与目标值的差距*P系数+被控参数速度*D系数+被控参数与目标值差距随时间累计*I系数。
在控制电机时,没有特殊情况下,由于d轴对电机旋转不生成贡献,pid控制可以只控制q轴的力,d轴可以进行控制也可以直接设置输出为0。
滤波
在速度控制和电流控制时,受限于采样精度和频率等,速度和电流是不稳定的且变化比较快,例如下图是电机速度的直接计算值,存在很多锯齿,在真实值附近波动,如果直接使用这样的值,会导致PID输出波动较大,

下图为经过滤波后,比较接近真实值: 滤波方法有很多种,比如低通滤波、卡尔曼滤波,本质就是在夹杂了噪音的数据中估计出一个接近真实的值。由于滤波是一个非常大的课题,原理不在本节进行说明,可直接查看后续实践部分的代码,只是在此提醒,输入PID控制器前,需要进行滤波计算。
滤波方法有很多种,比如低通滤波、卡尔曼滤波,本质就是在夹杂了噪音的数据中估计出一个接近真实的值。由于滤波是一个非常大的课题,原理不在本节进行说明,可直接查看后续实践部分的代码,只是在此提醒,输入PID控制器前,需要进行滤波计算。
单独位置控制
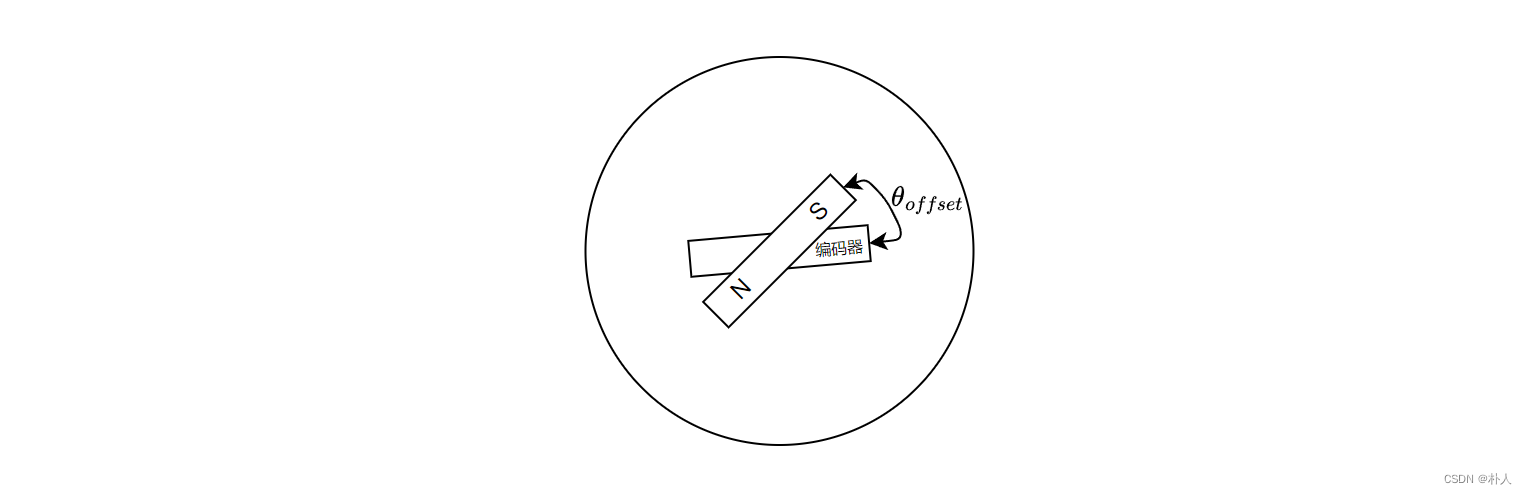
位置指的是角度,要注意,有两种物理角度,一个是电机角度,一个是转子角度,两者是不一样的。电机编码器是安装在转子外壳上的,因此编码器获得的是转子外壳的角度,而转子位于内部,由于转子外壳和转子是互相固定的,两种角度有一个固定偏移,安装的时候编码器零度不可能正好对着转子永磁体。编码器角度由编码器提供,转子角度也就能知道了。在后续实践部分会说明怎么获得这个固定偏移,在本节只需完成理论计算部分。合成的磁矢量是作用于转子永磁体的,因此理论计算是在转子角度基础上计算的。
有两种方法可以实现转子的位置控制:
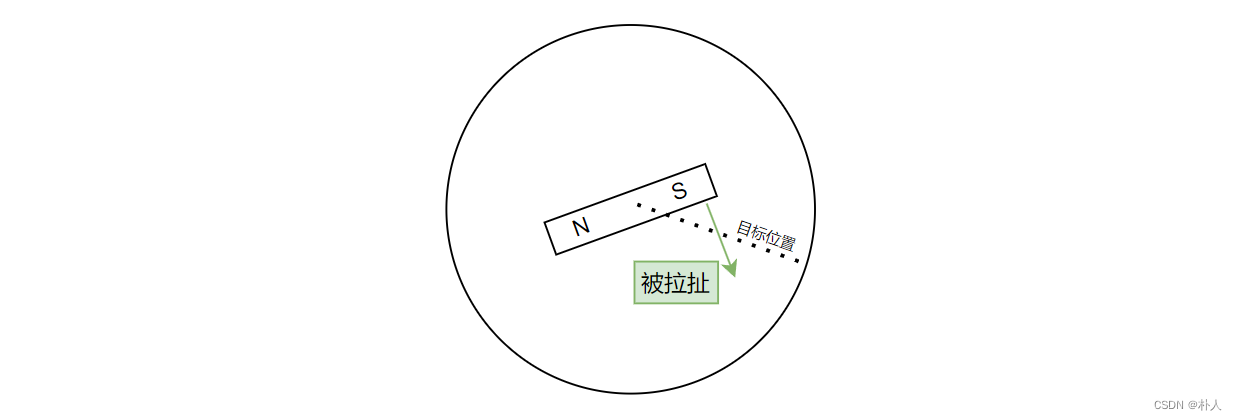
pid法:
直观的思想就是用转子q轴不停地左右拉扯转子,转子一旦偏离目标位置了,就在q轴施加一个反向的力拉扯一下,偏离越大,拉扯力越大,让转子回到目标位置。
优点:q轴能够提供较大的力,位置控制比较迅速有力。
缺点:由于q轴与转子永磁体磁矢量相差90度,因此需要知道转子实时位置(角度)。
由于在有编码器的情况下,转子实时位置很容易获得,因此大部分情况下使用pid控制位置。
单独位置的FOC控制框图如下图。图中的意思是输入一个目标位置,与编码器计算得到的角度进行差值计算,然后输入pid控制器,只控制转子q轴强度,d轴强度直接设置为0,最后将dq轴强度(0~1之间)输入到前文推导得到的SVPWM函数中,输出得到uvw桥臂的pwm占空比。这里要注意的是输入的目标位置 θ i n \theta_{in} θin可以是转子角度或者编码器角度或者多圈角度,只要与反馈的 θ \theta θ保持同一种角度即可。

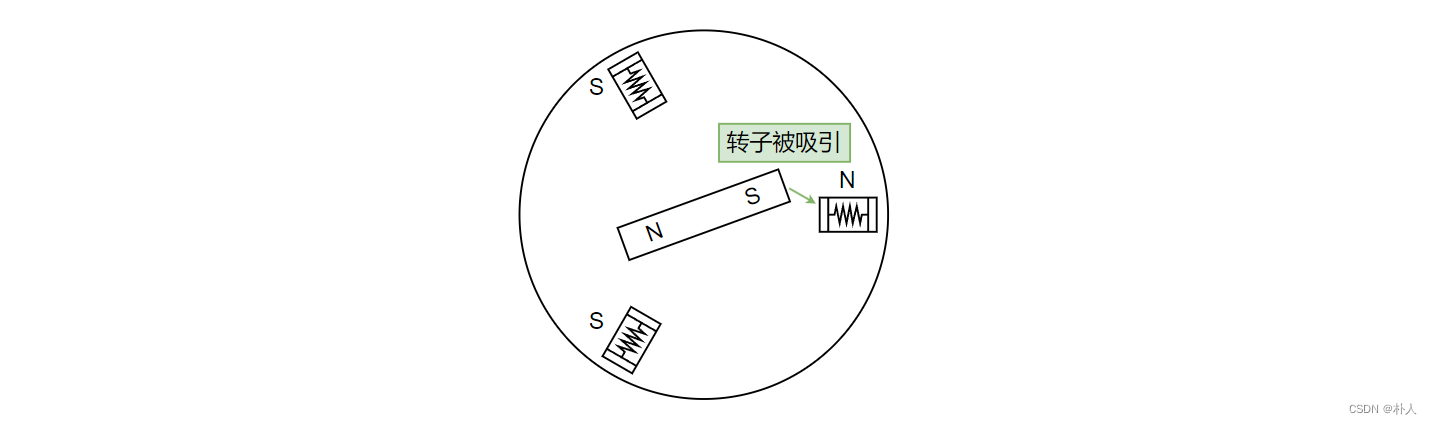
d轴强拖:
核心思想是人为控制线圈生成一个目标线圈磁矢量,永磁铁的d轴会被吸引到目标位置。注意该方法是吸引d轴到目标位置。
优点:由于生成的就是目标位置,因此无需知道转子角度,转子自然会被吸引过去。
缺点:切向分力小,轻微切向外力就能让转子明显脱离位置。
单独速度控制
速度控制使用d轴拖动的方法就不合适了,因为d轴拖动就是为了不使用编码器,没了编码器数据就很难计算速度了。速度控制可以使用pid控制方法,但是由于电机旋转过程中速度值变化比较不稳定,而D控制是与被控参数的变化程度成正比,所以一般只使用PI控制。
速度的计算方式非常简单,就是 当前角度 − 上次记录的角度 Δ t \frac{当前角度-上次记录的角度}{\Delta{t}} Δt当前角度−上次记录的角度。
将目标速度与实时速度的差值输入到PI控制中就能实现速度控制。
单独速度的FOC控制框图如下图。

单独电流控制
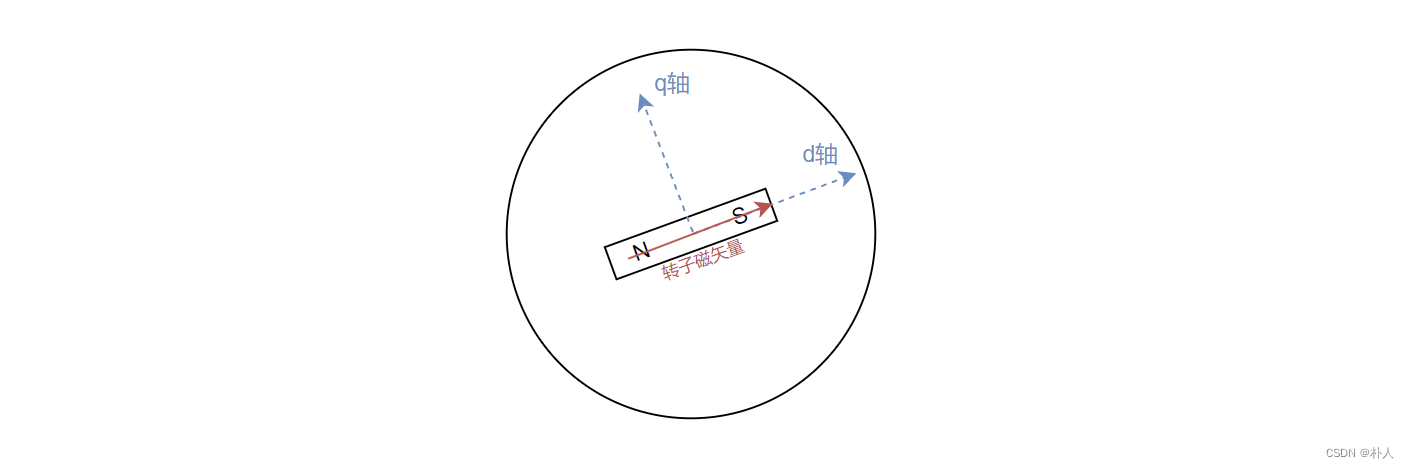
电机的电流代表了力矩大小。转子的受力在dq轴解耦后,可以发现只有q轴才对电机旋转生成贡献,只有q轴才产生力矩,因此只需要控制q轴电流即可控制电机力矩。如果对d轴电流也进行控制可以提升电机电流利用率,降低发热,提升电机最高力矩输出。
获得电机电流:
转子dq轴是一个抽象出来的概念,是为了方便解耦转子受力的,无法直接检测dq轴电流,能够直接检测的电流是电机相线电路上的电流,dq轴电流可以根据相线电流计算得到。
相线电流的检测有很多种,最常见的两种方式是:1.电流检测放置在上下桥臂功率管之间,称为在线检测。2.电流检测放置在下桥臂与GND之间,称为低端检测。
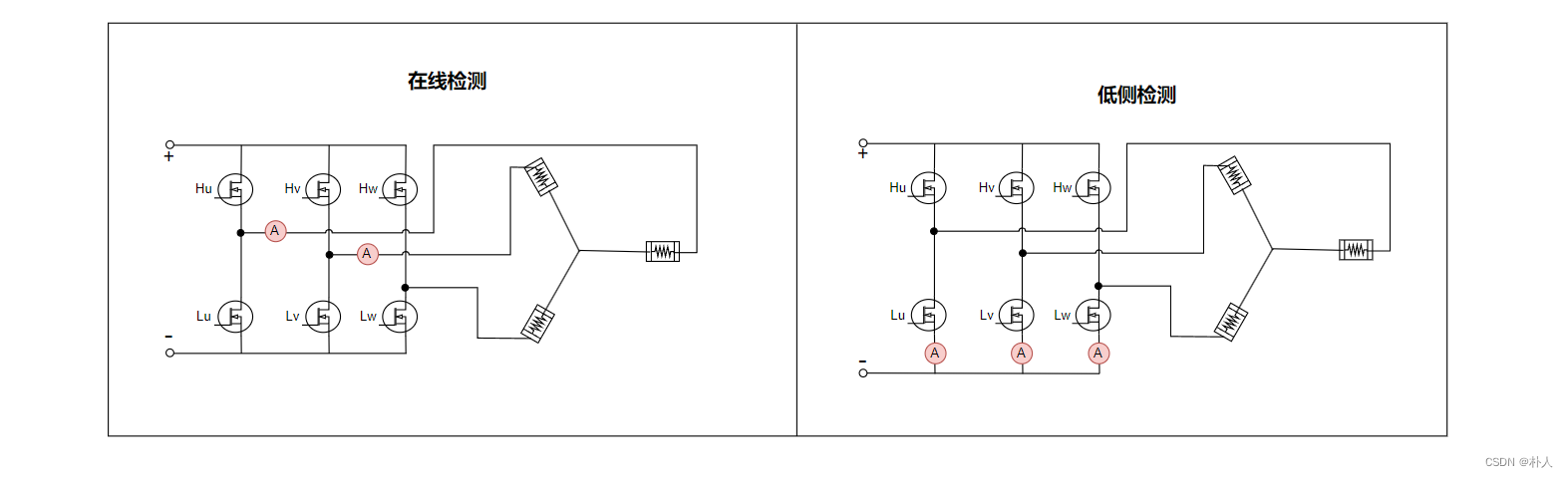
由于一个节点流出电流+流入电流=0,因此三个相线只需要两个电流检测单元即可。但是低侧检测最好使用三个电流检测单元,因为当某个桥臂的pwm占空比为1或者接近1时,该下桥臂将没有电流经过或者电流不稳定,三个相线就只剩下一个电流检测能够正常采集电流,有三个电流检测单元后,可以三个都读取电流,根据占空比情况选择其中两个电流值,另一个通过电流总和为0进行计算。在线检测则没有该困扰,因为不管下桥臂是否处于关闭状态,相线始终有电流经过。由于在线检测位置的电压比较大,因此在线检测的电流检测单元需要能够承受较大电压,价格比较高。
获得三个相线电流后,接下来想办法转换为dq轴电流。可以将相线电流投影到dq轴上,这样就能直接得到dq轴电流了,不过目前主流做法是先将dq轴投影到 α \alpha α轴和 β \beta β轴(这步称为clark变换),再将 α \alpha α轴和 β \beta β轴电流投影到dq轴(这步称为park变换),因为在更高级的无位置传感器FOC中会用到 α \alpha α轴和 β \beta β轴电流。
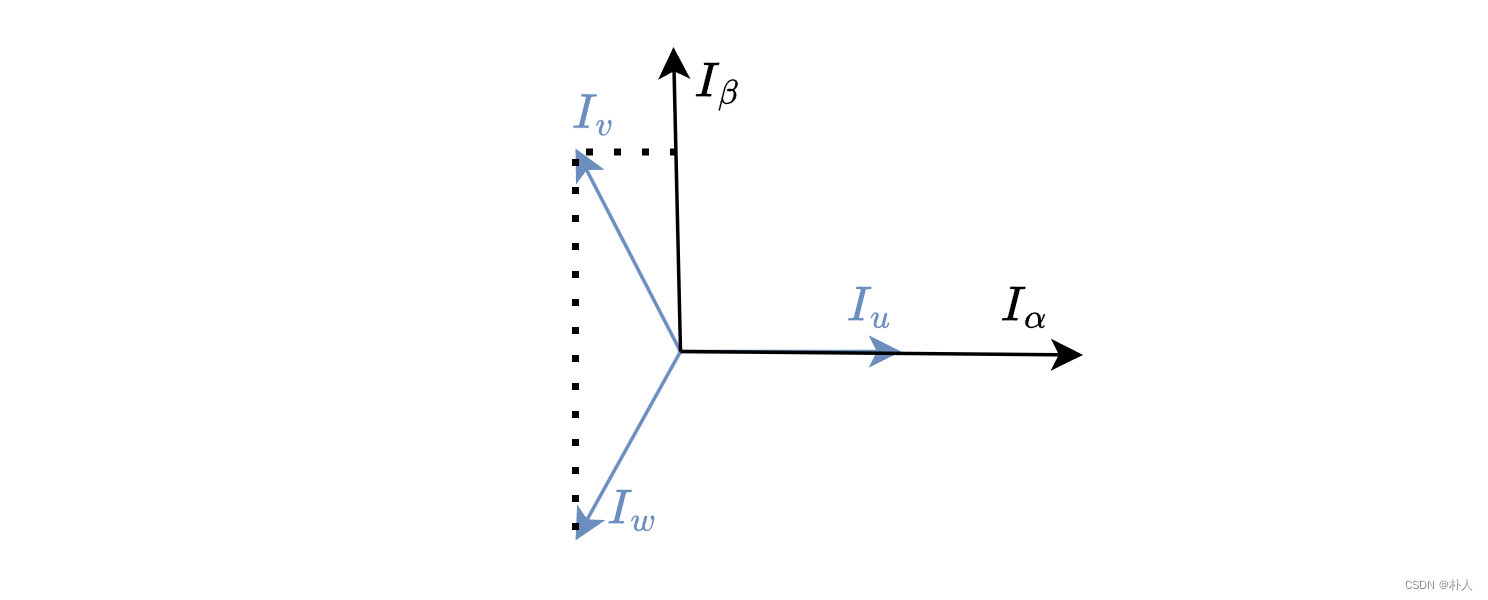
clark变换:
将三相电流 I u , I v , I w I_u,I_v,I_w Iu,Iv,Iw投影到 I α , I β I_\alpha,I_\beta Iα,Iβ上,从下图的几何关系可以看出,投影表达式为:
{ I α = I u − I v ∗ cos 6 0 ° − I w ∗ cos 6 0 ° I β = I v ∗ cos 3 0 ° − I w ∗ cos 3 0 ° \begin{cases} I_\alpha=I_u-I_v*\cos{60^{\degree}}-I_w*\cos{60^{\degree}} \\ I_\beta=I_v*\cos{30^{\degree}}-I_w*\cos{30^{\degree}} \end{cases} {Iα=Iu−Iv∗cos60°−Iw∗cos60°Iβ=Iv∗cos30°−Iw∗cos30°
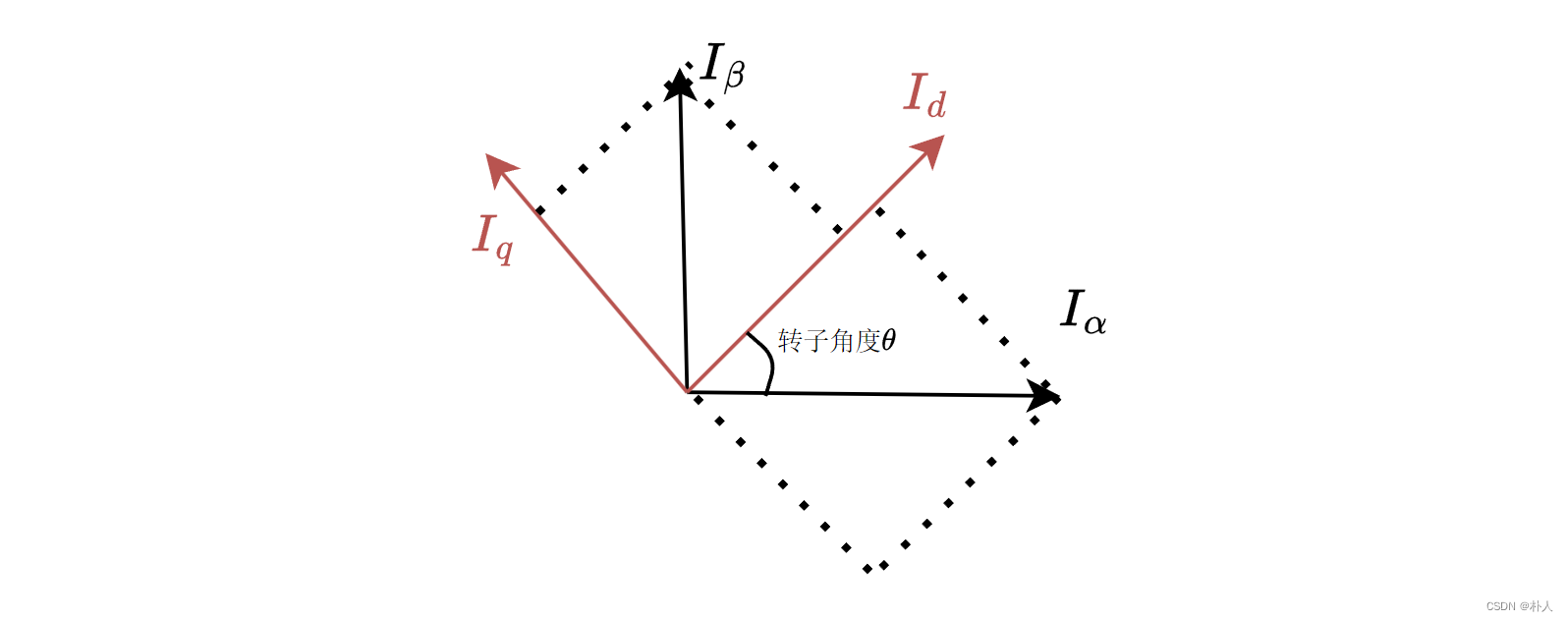
park变换:
将 I α , I β I_\alpha,I_\beta Iα,Iβ轴投影到dq轴(实际上就是乘以一个旋转矩阵),从下图的几何关系可以看出,投影表达式为:
{ I d = I α ∗ cos θ + I β ∗ sin θ I q = − I α ∗ sin θ + I β ∗ cos θ \begin{cases} I_d=I_\alpha*\cos{\theta}+I_\beta*\sin{\theta} \\ I_q=-I_\alpha*\sin{\theta}+I_\beta*\cos{\theta} \end{cases} {Id=Iα∗cosθ+Iβ∗sinθIq=−Iα∗sinθ+Iβ∗cosθ
单独电流的FOC控制图如下图,由于电流变化比较不稳定,所以与被控参数变化速度有关的D控制在这里通常不使用,只使用PI控制。

位置-速度-电流串级控制
如果有这样一个需求:控制位置时,规定电机归位过程中的最大速度以及最大电流;或者控制速度时,规定电机到达目标速度过程中的最大电流,那么就需要使用到位置-速度-电流串级控制。这里的串级控制并不是控制电机达到某一个电流值或者速度值,而是要求电机在控制过程中能够达到的最大电流值或者最大速度值,因为无法做到电机保持在一个位置的时候,依然有速度或者有电流。
串级控制的意思就是当前控制环的输入为上一个控制环的输出,以串级位置控制为例,控制框图为:

理论部分目前到此结束,我们得到了SVPWM的计算方法以及位置、速度、电流的控制流程,可以进行FOC代码编写了,但是实践的时候会遇到种种问题,比如相线的顺序、pwm占空比怎么落实、电流采样时刻、外设的配置等,接下来的实践部分使用超常见的单片机性价比之王:smt32f103c8t6以及stm32cube工具,不使用电机库,从零开始实现完整的FOC控制。
相关文章:
【从零开始实现stm32无刷电机FOC】【理论】【3/6 位置、速度、电流控制】
目录 PID控制滤波单独位置控制单独速度控制单独电流控制位置-速度-电流串级控制 上一节,通过对SVPWM的推导,我们获得了控制电机转子任意受力的能力。本节,我们选用上节得到的转子dq轴解耦的SVPWM形式,对转子受力进行合理控制&…...

使用MySQLInstaller配置MySQL
操作步骤 1.配置High Availability 默认选项Standalone MySQL Server classic MySQL Replication 2.配置Type and Networking ◆端口默认启用TCP/P网络 ◆端口默认为3306 3.配置Account and Roles 设置root账户的密码、添加其他管理员 4.配置Windows Service ◆配置MySQL Serv…...
命令执行(RCE)面对各种过滤,骚姿势绕过总结
1、什么是RCE RCE又称远程代码执行漏洞,可以让攻击者直接向后台服务器远程注入操作系统命令或者代码,从而控制后台系统。 2、RCE产生原因 服务器没有对执行命令的函数做严格的过滤,最终导致命令被执行。 3、命令执行函数 PHP代码执行函数…...

复杂的数仓项目,涵盖了从数据采集、处理、存储到可视化的整个流程
一个复杂的数仓项目,涵盖了从数据采集、处理、存储到可视化的整个流程。以下是对您提供信息的梳理和解释: 1. **项目架构**: - 包含实时流、离线流和配置流三条数据流。 - 数据源使用MySQL,开启binlog日志。 2. **数据采集…...
三相感应电机的建模仿真(3)基于ABC相坐标系Level2 S-Fun以及定子串不对称电抗起动过程仿真分析
1. 概述 2. 三相感应电动机状态方程式 3. 基于Level2 S-Function的仿真模型建立 4. 动态分析实例 5. 总结 6. 参考文献 1. 概述 三相感应电机自然坐标系下的数学模型是一组周期性变系数微分方程(其电感矩阵是转子位置角的函数,转子位置角随时间按正弦规律变化),将其用…...
了解Adam和RMSprop优化算法
优化算法是机器学习和深度学习模型训练中至关重要的部分。本文将详细介绍Adam(Adaptive Moment Estimation)和RMSprop(Root Mean Square Propagation)这两种常用的优化算法,包括它们的原理、公式和具体代码示例。 RMS…...

对于配置LLM,集显和独显的具体区别和影响
在配置大型语言模型(LLM)时,集成显卡(集显)和独立显卡(独显)之间的区别和影响主要体现在以下几个方面: 1. 性能差异 集成显卡(集显): 集显通常集…...

uniapp上架到appstore遇到的问题
1、appstore在美国审核,需要把服务器接口的国外访问权限放开 2、登陆部分 a、审核时只能有密码登陆,可以通过接口响应参数将其他登陆方式暂时隐藏,审核成功后放开即可 b、需要有账号注销功能 3、使用照相机和相册功能时需要写清楚描述文案...
)
每天10个vue面试题(一)
1. Vue的基本原理? 当一个Vue实例创建时,Vue会遍历data中的属性,用Object.defineProperty(vue3.0使用proxy )将它们转为 getter/setter,并且在内部追踪相关依赖,在属性被访问和修改时通知变化。…...

【博主推荐】HTML5好看的酷酷的个人简历、个人主页、个人网站源码
文章目录 1.设计来源1.1 主界面1.2 关于我界面1.3 我的项目界面1.4 我的经验界面1.5 我的技能界面1.6 我的文章界面1.7 联系我界面 2.效果和源码2.1 动态效果2.2 源代码 源码下载万套模板,程序开发,在线开发,在线沟通 作者:xcLeig…...

【深度学习】PyTorch深度学习笔记01-Overview
参考学习:B站视频【《PyTorch深度学习实践》完结合集】-刘二大人 ------------------------------------------------------------------------------------------------------- 1. 基于规则的深度学习 2. 经典的机器学习——手动提取一些简单的特征 3. 表示学习…...
IDEA新建项目并撰写Java代码的方法
本文介绍在IntelliJ IDEA软件中,新建项目或打开已有项目,并撰写Java代码的具体方法;Groovy等语言的代码也可以基于这种方法来撰写。 在之前的文章IntelliJ IDEA社区版在Windows电脑中的下载、安装方法(https://blog.csdn.net/zheb…...

24-7-9-读书笔记(九)-《爱与生的苦恼》[德]叔本华 [译]金玲
文章目录 《爱与生的苦恼》阅读笔记记录总结 《爱与生的苦恼》 《爱与生的苦恼》叔本华大佬的名书,里面有其“臭名昭著”的《论女人》,抛开这篇其他的还是挺不错的,哲学我也是一知半解,这里看得也凭喜好,这里记录一些自…...

uniapp本地打包到Android Studio生成APK文件
(1)安装 Android Studio 软件; 下载地址:官方下载地址,英文环境 安装:如下之外,其他一键 next (2)配置java环境; 下载:j…...

如何设计一个高可扩展的分布式架构?
如何设计一个高可扩展的分布式架构? 大家好,我是微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 1. 引言:分布式架构的重要性 随着互联网应用的发展,单一服务器往往难以满足…...

大话C语言:第28篇 内存分配与释放
1 malloc函数 函数说明: #include <stdlib.h>void *malloc(size_t size); 功能:在内存的动态存储区(堆区)中分配一块长度为size字节的连续区域,用来存放类型说明符指定的类型。分配的内存空间内容不确定。 参数:size&…...

第一个基于FISCOBCOS的前后端项目(发行转账)
本文旨在介绍一个简单的基于fiscobcos的前后端网站应用。Springbootjs前后端不分离。 所使用到的合约也是一个最基本的。首先您需要知道的是完整项目分为三部分,1是区块链平台webase搭建(此项目使用节点前置webase-front即可),2是…...

python采集阿里巴巴历年员工人数统计报告
数据为2012到2022财年阿里巴巴每年的全职员工数量。截止2022年3月31日,阿里巴巴共有全职员工254941人,比上年增长3479人。 数据来源于阿里巴巴20-F和F-1文件 按阿里巴巴财政年度进行统计,阿里巴巴财年结束日期为每年3月31日 为全职员工人数 阿…...

git 基础场景操作
git基于当前分支创建分支,合并分支 git checkout -b new-batch git push origin new-batch git branch --set-upstream-toorigin/new-batch git pull git checkout master git merge origin new-batch git 开发分支合并 描述: git 我有 develop …...

代码随想录-DAY④-链表——leetcode 24 | 19 | 142
24 思路 如果 pre 的后面没有节点或者只有一个节点,则没有更多的节点需要交换, 否则,通过更新节点的指针关系交换 pre 后面的两个节点, 最后,返回新的链表的头节点 dummyhead->next。 时间复杂度:O(n) 空间复杂…...

STM32+rt-thread判断是否联网
一、根据NETDEV_FLAG_INTERNET_UP位判断 static bool is_conncected(void) {struct netdev *dev RT_NULL;dev netdev_get_first_by_flags(NETDEV_FLAG_INTERNET_UP);if (dev RT_NULL){printf("wait netdev internet up...");return false;}else{printf("loc…...

FastAPI 教程:从入门到实践
FastAPI 是一个现代、快速(高性能)的 Web 框架,用于构建 API,支持 Python 3.6。它基于标准 Python 类型提示,易于学习且功能强大。以下是一个完整的 FastAPI 入门教程,涵盖从环境搭建到创建并运行一个简单的…...

连锁超市冷库节能解决方案:如何实现超市降本增效
在连锁超市冷库运营中,高能耗、设备损耗快、人工管理低效等问题长期困扰企业。御控冷库节能解决方案通过智能控制化霜、按需化霜、实时监控、故障诊断、自动预警、远程控制开关六大核心技术,实现年省电费15%-60%,且不改动原有装备、安装快捷、…...

鸿蒙中用HarmonyOS SDK应用服务 HarmonyOS5开发一个医院挂号小程序
一、开发准备 环境搭建: 安装DevEco Studio 3.0或更高版本配置HarmonyOS SDK申请开发者账号 项目创建: File > New > Create Project > Application (选择"Empty Ability") 二、核心功能实现 1. 医院科室展示 /…...

转转集团旗下首家二手多品类循环仓店“超级转转”开业
6月9日,国内领先的循环经济企业转转集团旗下首家二手多品类循环仓店“超级转转”正式开业。 转转集团创始人兼CEO黄炜、转转循环时尚发起人朱珠、转转集团COO兼红布林CEO胡伟琨、王府井集团副总裁祝捷等出席了开业剪彩仪式。 据「TMT星球」了解,“超级…...
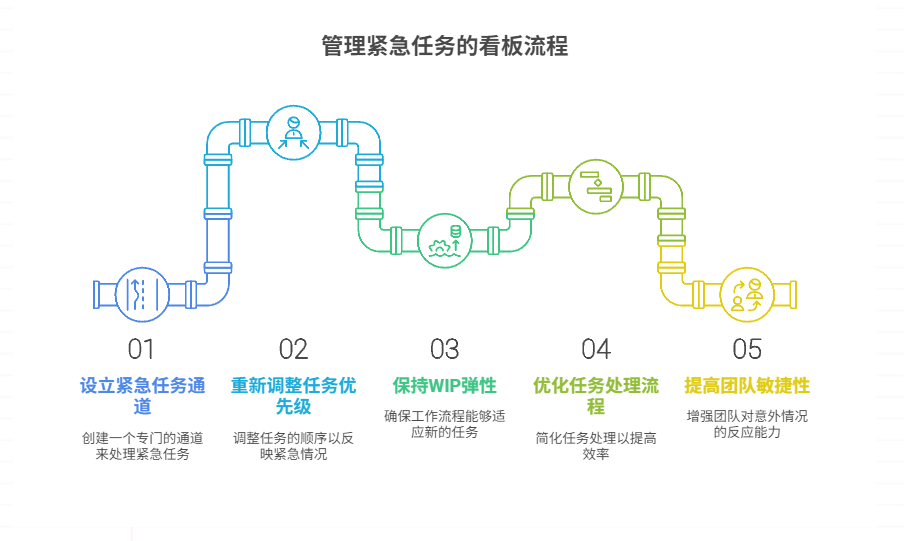
如何在看板中有效管理突发紧急任务
在看板中有效管理突发紧急任务需要:设立专门的紧急任务通道、重新调整任务优先级、保持适度的WIP(Work-in-Progress)弹性、优化任务处理流程、提高团队应对突发情况的敏捷性。其中,设立专门的紧急任务通道尤为重要,这能…...

QT3D学习笔记——圆台、圆锥
类名作用Qt3DWindow3D渲染窗口容器QEntity场景中的实体(对象或容器)QCamera控制观察视角QPointLight点光源QConeMesh圆锥几何网格QTransform控制实体的位置/旋转/缩放QPhongMaterialPhong光照材质(定义颜色、反光等)QFirstPersonC…...

Neko虚拟浏览器远程协作方案:Docker+内网穿透技术部署实践
前言:本文将向开发者介绍一款创新性协作工具——Neko虚拟浏览器。在数字化协作场景中,跨地域的团队常需面对实时共享屏幕、协同编辑文档等需求。通过本指南,你将掌握在Ubuntu系统中使用容器化技术部署该工具的具体方案,并结合内网…...

人工智能 - 在Dify、Coze、n8n、FastGPT和RAGFlow之间做出技术选型
在Dify、Coze、n8n、FastGPT和RAGFlow之间做出技术选型。这些平台各有侧重,适用场景差异显著。下面我将从核心功能定位、典型应用场景、真实体验痛点、选型决策关键点进行拆解,并提供具体场景下的推荐方案。 一、核心功能定位速览 平台核心定位技术栈亮…...

webpack面试题
面试题:webpack介绍和简单使用 一、webpack(模块化打包工具)1. webpack是把项目当作一个整体,通过给定的一个主文件,webpack将从这个主文件开始找到你项目当中的所有依赖文件,使用loaders来处理它们&#x…...