demon drone 200无人机标定流程
demon drone 200无人机标定流程
- 一、飞控固件更新
- 1.1 固件更新
- 1.2 参数更新
- 二、imu标定
- 2.1 安装imu标定工具(在你自己的电脑上)
- 2.2 录制rosbag(在对应飞机上)
- 2.3 运行标定程序(在你自己的电脑上)
- 三、双目及imu联合标定
- 3.1 安装标定工具(参考2.1)
- 3.2 录制rosbag
- 3.3 运行标定程序
- 3.4 注意事项
- 四、程序参数更新
一、飞控固件更新
飞控固件按需更新。参考QQ群:562983648,官方说明
1.1 固件更新
需要按照要求更新1.13.3对应的bootloader和固件。
1.2 参数更新
刷新参数,并重新标定传感器。
二、imu标定
2.1 安装imu标定工具(在你自己的电脑上)
# 我的这个git库中包含了imu标定和相机标定程序
git clone https://gitee.com/nankel/kalibr_workspace.git
cd kalibr_workspace
catkin_make
注意:可能会出错,src中code_utils和imu_utils有顺序要求,可以忽略错误多次catkin_make。详细内容可以参考我之前的博客D435i标定摄像头和IMU笔记三(IMU标定篇)中的港科大标定方法。
注意:不要忘了将setup.bash加入~/.bashrc中。
2.2 录制rosbag(在对应飞机上)
# 1、启动mavros
roslaunch mavros px4.launch# 2、确认imu频率。确保imu发送频率大于200Hz,本无人机一般为250Hz。
rostopic hz /mavros/imu/data_raw# 3、静止不动30分钟(事实上几分钟也行,最好久一点),录制rosbag。会在当前路径生成imu.bag文件
rosbag record -O imu /mavros/imu/data_raw# 4、将rosbag复制到运行标定程序的电脑。U盘复制或者局域网scp复制
2.3 运行标定程序(在你自己的电脑上)
1)修改程序配置
launch路径:kalibr_workspace/src/imu_utils/launch/nankel_imuCali.launch
内容及注释如下:
<launch><node pkg="imu_utils" type="imu_an" name="imu_an" output="screen"><param name="imu_topic" type="string" value= "/mavros/imu/data_raw"/> <!-- imu话题名 --><param name="imu_name" type="string" value= "demon_mini_imu"/> <!-- imu名,随便改 --><param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/> <!-- 标定数据保存地址 --><param name="max_time_min" type="int" value= "30"/> <!-- 标定最短时长(分钟),可以自行更改,要比实际录制短,要不然不会停--><param name="max_cluster" type="int" value= "100"/></node>
</launch>
注意:按照此脚本,结果文件将保存于kalibr_workspace/src/imu_utils/data中
2)运行程序
# 1、运行程序
roslaunch imu_utils nankel_imuCali.launch
# 2、400倍速播放rosbag
rosbag play -r 400 imu.bag
3)保存标定参数
新建imu.yaml文件,后面联合标定会用到,里面的数据更新为标定数据:
rostopic: /mavros/imu/data_raw
update_rate: 250.0 #Hzgyroscope_noise_density: 0.00302857381362
gyroscope_random_walk: 3.00373059934e-05accelerometer_noise_density: 0.0272600517598
accelerometer_random_walk: 0.000579817988633
三、双目及imu联合标定
3.1 安装标定工具(参考2.1)
3.2 录制rosbag
# 1、启动双目程序
roslaunch stereo stereo.launch
# 2、启动mavros
roslaunch mavros px4.launch# 3、录制rosbag(录制过程要上下左右前后各运动两次)
rosbag record -O stereo_imu /mavros/imu/data_raw /stereo/left/image_raw /stereo/right/image_raw# 4、将rosbag复制到运行标定程序的电脑。U盘复制或者局域网scp复制
注意:如果想要弹出双目图像,可以使用rviz观看图像。或者修改配置demon_drone_ws/src/stereo/launch/stereo_config.yaml中if_show_orig: 1。
注意:建议使用台式电脑,不然标定时长将会很久。
3.3 运行标定程序
也可以参考我之前的博客:D435i标定摄像头和IMU笔记四-2(双目摄像头与IMU联合标定篇)
1、准备标定板文件checkerboard.yaml
target_type: 'checkerboard' #gridtype
targetCols: 5 # 标定板内角数量(列)
targetRows: 8 # 标定板内角数量(行)
rowSpacingMeters: 0.045 #size of one chessboard square [m]
colSpacingMeters: 0.045 #size of one chessboard square [m]
2、运行标定程序
# 1、标定双目相机
kalibr_calibrate_cameras --target checkerboard.yaml --bag stereo_imu.bag --models pinhole-radtan pinhole-radtan --topics /stereo/left/image_raw /stereo/right/image_raw# 2、联合标定双目相机和imu(要等待双目标定结束)
kalibr_calibrate_imu_camera --target checkerboard.yaml --cam camchain-stereo_imu.yaml --imu imu/imu.yaml --bag stereo_imu.bag
3、标定结果文件:results-imucam-imu_stereo.txt:
3.4 注意事项
注意:
1、观察相机标定误差,一般在1个像素以内。
2、观察联合标定误差,一般2个像素以内。
3、imu和相机时差一般是负数0~-0.06以内。
四、程序参数更新
1、将标定文件results-imucam-imu_stereo.txt复制到/home/khadas/demon_packages/demon_drone_ws/src/stereo/launch/results-imucam-stereo_imu.txt下。
2、运行自动更新脚本
cd /home/khadas/demon_packages/demon_drone_ws/src/stereo/launch && python3 config.py
3、移动配置文件
移动vins所需文件:可见/home/khadas/demon_packages/demon_drone_ws/src/VINS-Fusion/config/stereo中文件
4、大功告成,运行程序:可见脚本/home/khadas/demon_packages/demon_drone_ws/scipts/fpv_ego.sh
相关文章:

demon drone 200无人机标定流程
demon drone 200无人机标定流程 一、飞控固件更新1.1 固件更新1.2 参数更新 二、imu标定2.1 安装imu标定工具(在你自己的电脑上)2.2 录制rosbag(在对应飞机上)2.3 运行标定程序(在你自己的电脑上) 三、双目及imu联合标定3.1 安装标…...

案例开发-日程管理-第一期
九 案例开发-日程管理-第一期 共7期 9.1 登录页及校验 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>Title</title><style>.ht{text-align: center;color: cadetblue;font-family: 幼…...

【Java 注解,自定义注解,元注解,注解本质,注解解析】
文章目录 什么是注解?Java内置注解自定义注解元注解注解的本质注解解析 什么是注解? 注解是Java编程语言中的一种元数据,提供了有关程序的额外信息。注解以符号开始,紧跟着注解的名称和一对括号,括号内包含注解的参数…...

染色法判定二分图
什么是二分图? 二分图,也称作二部图,是图论中的一种特殊模型。在一个无向图G(V,E) 中,如果顶点集合 V 可以被分割成两个互不相交的子集 A 和 B,并且图中的每条边 (i,j) 关联的两个顶点 i 和 j 分别属于这两个不同的顶…...

自动气象站的主要功能优势
在科技日新月异的今天,我们生活的方方面面都受到了科技的影响。其中,自动气象站作为气象观测领域的重要一环,不仅提升了气象数据的准确性和时效性,还为我们的日常生活、农业生产、灾害预防等提供了重要的数据支持。 自动气象站概述…...

Java中实现二维数组(矩阵)的转置
在矩阵运算中,矩阵的转置是一个基本操作,即将矩阵的行变成列,列变成行。在Java中,我们可以通过编写一个方法来实现二维数组的转置。下面,我将详细介绍如何在Java中完成这一任务,并提供完整的代码示例。 编…...

Prometheus+Grafana主机运行数据
目录 介绍 安装Node Exporter 配置Prometheus 验证配置 导入仪表盘 介绍 Prometheus是一款开源的监控和警报工具,而Node Exporter是Prometheus的一个官方插件,用于采集主机上的各种系统和硬件指标。 安装Node Exporter 下载最新版本的Node Export…...

GraphQL在Postman中:释放API查询的强大潜能
🚀 GraphQL在Postman中:释放API查询的强大潜能 Postman作为API开发和测试的领先工具,对GraphQL的支持为开发者提供了一种新的方式来查询和管理数据。GraphQL是一种查询语言,用于API,允许客户端明确指定他们需要哪些数…...

大语言模型里的微调vs RAG vs 模板提示词
文章目录 介绍微调(Fine-tuning)定义优点:缺点:应用场景:技术细节 检索增强生成(RAG,Retrieval-Augmented Generation)定义优点:缺点:应用场景:技…...

网络编程:常用网络测试工具
telnet netstat ping arp wireshark(网络抓包工具) tcpdumpssh2 secure crt ——软件工具sudo ufw disable sudo apt-get install openssh-server openssh-client //两个命令敲完 得重启sudo apt-get install wireshark 1、telnet 远程登录工具&…...

mov视频怎么改成mp4?把mov改成MP4的四个方法
mov视频怎么改成mp4?选择合适的视频格式对于确保内容质量和流通性至关重要。尽管苹果公司的mov格式因其出色的视频表现备受赞誉,但在某些情况下,它并非最佳选择,因为使用mov格式可能面临一些挑战。MP4格式在各种设备(如…...

力扣1472.设计浏览器历史记录
力扣1472.设计浏览器历史记录 用双指针记录历史记录 以及栈顶高度移动时会直接把之前的记录消掉 class BrowserHistory {int pos-1;int top0;string history[5010];public:BrowserHistory(string homepage) {visit(homepage);}void visit(string url) {pos ;top pos;histor…...

准大一新生开学千万要带证件照用途大揭秘
1、提前关注好都有哪些考场,以及这些考场大致在网页的哪个位置。比如我选对外经贸大学,我就直接找到第二个点进去。 2、电脑上同时开了谷歌浏览器和IE浏览器,以及手机也登陆了。亲测下来,同一时间刷新,谷歌浏览器能显示…...

QImage显示图片像素
在Qt中,QImage 类是用来表示和处理图像的。如果你想查看或显示一个图片的像素数据,你可以使用 QImage 提供的方法来访问这些数据。以下是一些基本的方法来获取和显示图片的像素信息: 获取图像的像素格式: 使用 QImage::format() …...
uniapp使用高德地图(公众号+h5)
选择微信小程序的话后果就是你的地图出不来,出来了就报key异常 下面直接放配置和代码: 打包后的高德uni-app,uniCloud,serverless,高德地图,申请高德地图Key,配置使用高德地图,参数说明,高德开放平台用户名,百度地图,申请百度地图Key,配置使用百度地图,…...

深度学习与浅层学习:技术变革下的竞争态势
深度学习与浅层学习:技术变革下的竞争态势 在过去十年中,深度学习的崛起对整个人工智能领域产生了巨大影响,几乎在各种任务中显示出超越传统浅层学习方法的性能。这种变化不仅推动了技术的进步,还对硬件市场,尤其是显…...

LeetCode 219. 存在重复元素 II
LeetCode 219. 存在重复元素 II 给你一个整数数组 nums 和一个整数 k ,判断数组中是否存在两个 不同的索引 i 和 j ,满足 nums[i] nums[j] 且 abs(i - j) < k 。如果存在,返回 true ;否则,返回 false 。 示例 1&am…...

【目标检测】使用自己的数据集训练并预测yolov8模型
1、下载yolov8的官方代码 地址: GitHub - ultralytics/ultralytics: NEW - YOLOv8 🚀 in PyTorch > ONNX > OpenVINO > CoreML > TFLite 2、下载目标检测的训练权重 yolov8n.pt 将 yolov8n.pt 放在ultralytics文件夹下 3、数据集分布 注…...
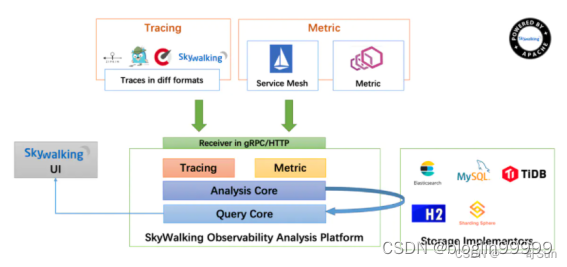
应用监控SkyWalking调研
参考: 链路追踪( Skyworking )_skywalking-CSDN博客 企业级监控项目Skywalking详细介绍,来看看呀-CSDN博客 SkyWalking 极简入门 | Apache SkyWalking 使用 SkyWalking 监控 ClickHouse Server | Apache SkyWalking https://zhuanlan.zhihu.com/p/3…...

Selenium使用注意事项:
find_element 和 find_elements 的区别 WebDriver和WebElement的区别 问题: 会遇到报错: selenium.common.exceptions.NoSuchElementException: Message: no such element: Unable to locate element: {"method":"css selector",&…...

SpringBoot-17-MyBatis动态SQL标签之常用标签
文章目录 1 代码1.1 实体User.java1.2 接口UserMapper.java1.3 映射UserMapper.xml1.3.1 标签if1.3.2 标签if和where1.3.3 标签choose和when和otherwise1.4 UserController.java2 常用动态SQL标签2.1 标签set2.1.1 UserMapper.java2.1.2 UserMapper.xml2.1.3 UserController.ja…...

在软件开发中正确使用MySQL日期时间类型的深度解析
在日常软件开发场景中,时间信息的存储是底层且核心的需求。从金融交易的精确记账时间、用户操作的行为日志,到供应链系统的物流节点时间戳,时间数据的准确性直接决定业务逻辑的可靠性。MySQL作为主流关系型数据库,其日期时间类型的…...
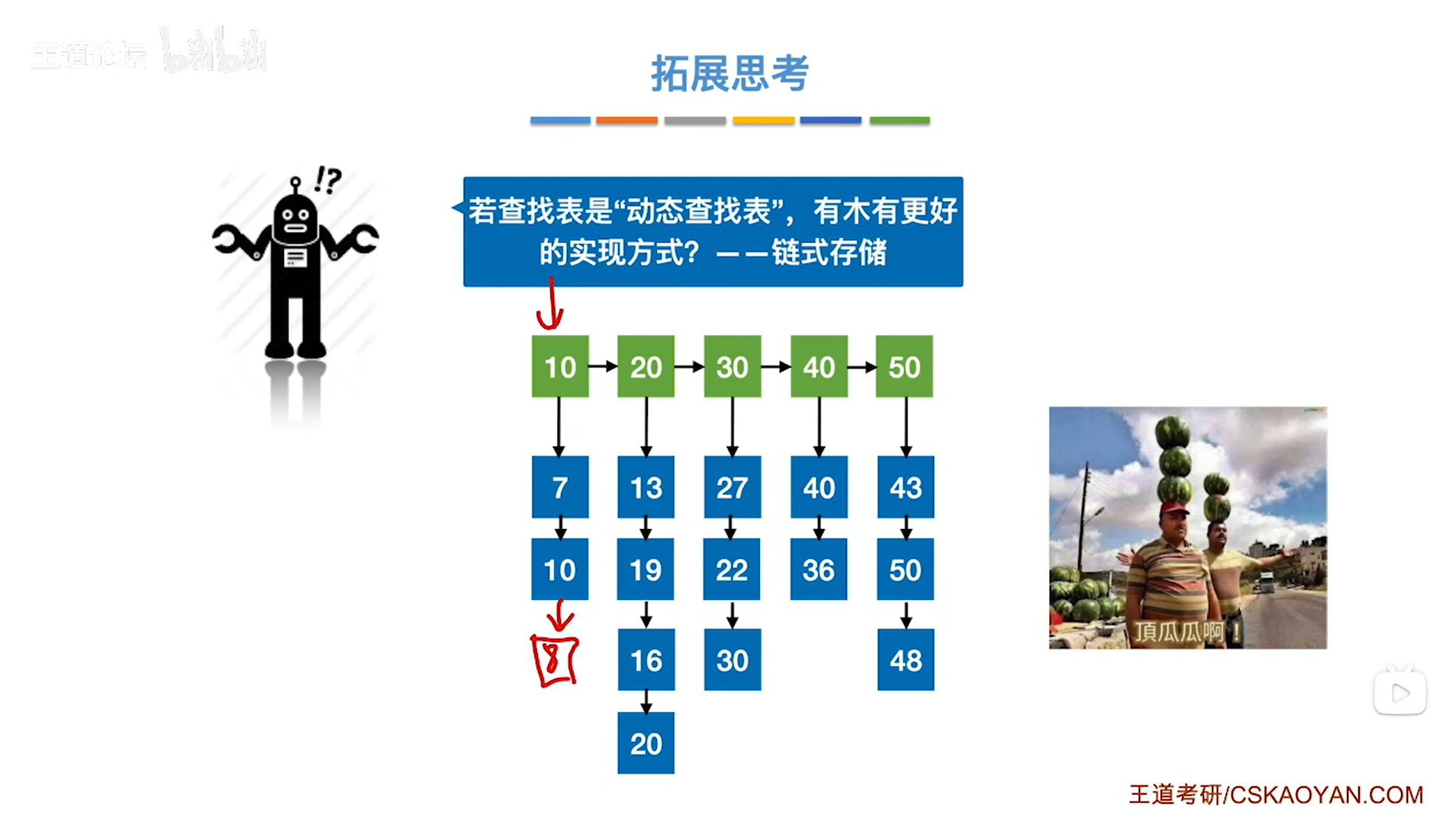
7.4.分块查找
一.分块查找的算法思想: 1.实例: 以上述图片的顺序表为例, 该顺序表的数据元素从整体来看是乱序的,但如果把这些数据元素分成一块一块的小区间, 第一个区间[0,1]索引上的数据元素都是小于等于10的, 第二…...
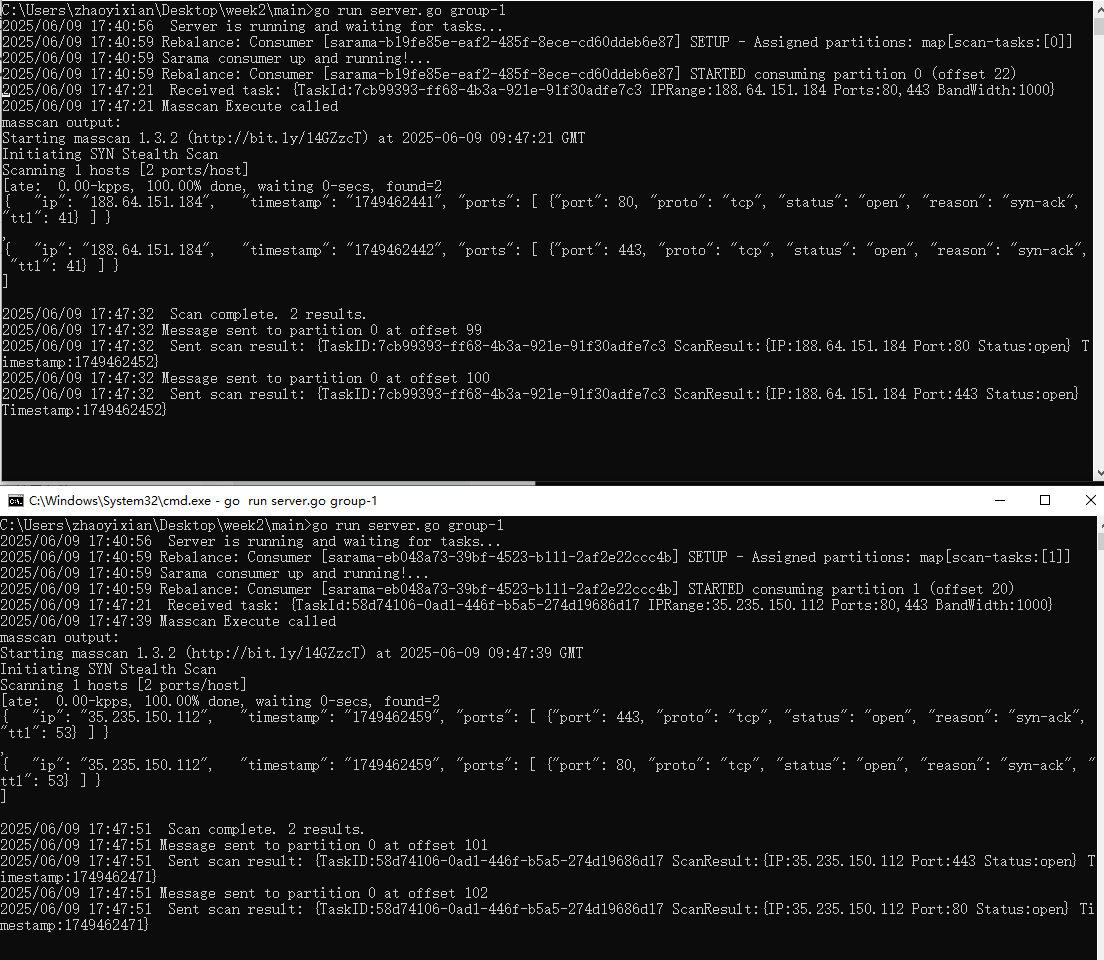
【kafka】Golang实现分布式Masscan任务调度系统
要求: 输出两个程序,一个命令行程序(命令行参数用flag)和一个服务端程序。 命令行程序支持通过命令行参数配置下发IP或IP段、端口、扫描带宽,然后将消息推送到kafka里面。 服务端程序: 从kafka消费者接收…...

MongoDB学习和应用(高效的非关系型数据库)
一丶 MongoDB简介 对于社交类软件的功能,我们需要对它的功能特点进行分析: 数据量会随着用户数增大而增大读多写少价值较低非好友看不到其动态信息地理位置的查询… 针对以上特点进行分析各大存储工具: mysql:关系型数据库&am…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...

多模态商品数据接口:融合图像、语音与文字的下一代商品详情体验
一、多模态商品数据接口的技术架构 (一)多模态数据融合引擎 跨模态语义对齐 通过Transformer架构实现图像、语音、文字的语义关联。例如,当用户上传一张“蓝色连衣裙”的图片时,接口可自动提取图像中的颜色(RGB值&…...
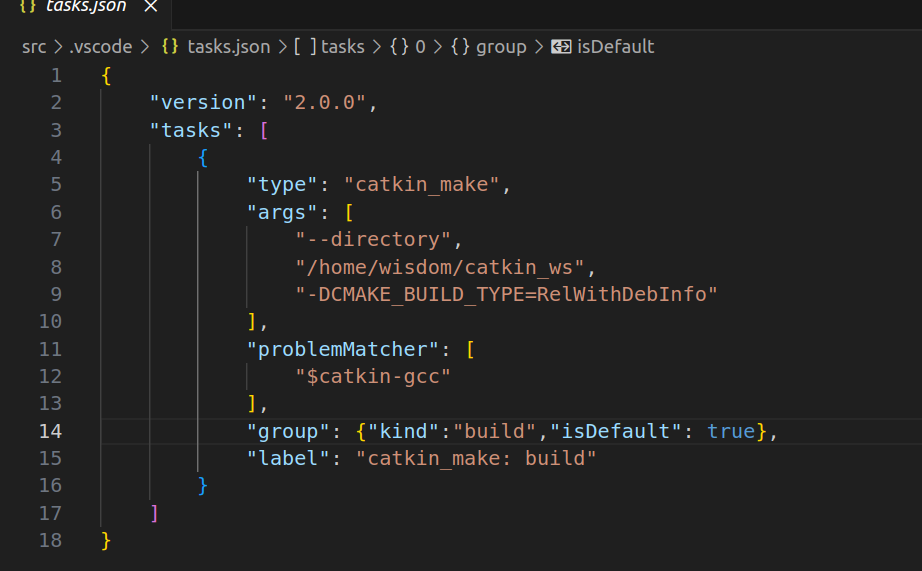
1.3 VSCode安装与环境配置
进入网址Visual Studio Code - Code Editing. Redefined下载.deb文件,然后打开终端,进入下载文件夹,键入命令 sudo dpkg -i code_1.100.3-1748872405_amd64.deb 在终端键入命令code即启动vscode 需要安装插件列表 1.Chinese简化 2.ros …...

Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决
Spring Cloud Gateway 中自定义验证码接口返回 404 的排查与解决 问题背景 在一个基于 Spring Cloud Gateway WebFlux 构建的微服务项目中,新增了一个本地验证码接口 /code,使用函数式路由(RouterFunction)和 Hutool 的 Circle…...
深度学习习题2
1.如果增加神经网络的宽度,精确度会增加到一个特定阈值后,便开始降低。造成这一现象的可能原因是什么? A、即使增加卷积核的数量,只有少部分的核会被用作预测 B、当卷积核数量增加时,神经网络的预测能力会降低 C、当卷…...