新手学习Gazebo+ros仿真控制小车-----易错和自己理解
赵虚左老师讲的很详细,这里只是理一下思路,说下突然出现“新”概念之间的关系。
urdf文件:里面是配置模型的,既有模型的位置、尺寸、颜色,也包含复杂的物理模型信息比如:转动惯量,碰撞box大小等等,总之是定义模型的。
xacro文件: 也是配置模型的,就是urdf的高级版。
总流程就是:定义模型-》组装模型-》在launch文件启动-》加载Gazebo里-》打开自带的ros-control键盘控车
总结:
1:link里的 fame是相对于可视化模型的偏移,如果为0,0,0。那两坐标系重合,坐标系原点在模型左下角。有时候想让坐标系在模型里面,就要改link里的
joint里的 是坐标系位置,在rviz里就表示模型放在哪里的位置,比如雷达放在高1m,则:joint里的 z=1,这里的高是相对于谁高呢? 所以要在joint里写parent,是child相对于parent的高

说的问题是:选择不同的frame_id时候,就不显示其他的图像在rviz里,本质原因是,坐标系没统一变换,不在一棵TF数下,导致不会全部显示


Start.sh同时启动雷达、相机、地盘
<!-- 机器人启动文件:1.启动底盘2.启动激光雷达3.启动摄像头-->
<launch><include file="$(find ros_arduino_python)/launch/arduino.launch" /><include file="$(find usb_cam)/launch/usb_cam-test.launch" /><include file="$(find rplidar_ros)/launch/rplidar.launch" />
</launch>
静态坐标变换,指定了相机、雷达相对于底盘footprint关系
args="0.08 0 0.1 0 0 0 /base_footprint /camera_link"表示:xyz和欧拉角,父级坐标系和子坐标系。
父级坐标系和子坐标系和之前launch的对应
<!-- 机器人启动文件:当不包含机器人模型时,需要发布坐标变换-->
<launch><include file="$(find mycar_start)/launch/start.launch" /> <node name="camera2basefootprint" pkg="tf2_ros" type="static_transform_publisher" args="0.08 0 0.1 0 0 0 /base_footprint /camera_link"/><node name="rplidar2basefootprint" pkg="tf2_ros" type="static_transform_publisher" args="0 0 0.1 0 0 0 /base_footprint /laser"/>
</launch>

实例:
<link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><!-- <sphere radius="0.3" /> --></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="0 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><material name="black"><color rgba="0.7 0.5 0 0.5" /></material></visual></link>

赵老师的说明写的太好复制不过来了
我的理解:先在urdf设置一堆link,表示定义模型的尺寸大小啥的,先把东西捏好,然后再设置一堆joint来连接刚刚定义的link.
我理解link里的 可以都是000,表示开始放在的位置 ,joint里的 表示parent和child相对位置。
<!-- 添加摄像头 --> 表示摄像头放在0,0,0<link name="camera"><visual><geometry><box size="0.02 0.05 0.05" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="red"><color rgba="1 0 0 0.5" /></material></visual></link><!-- 关节 --> 摄像头 作为child相对于base移动0.2 0 0.075<joint name="camera2baselink" type="continuous"><parent link="base_link"/> <child link="camera" /><origin xyz="0.2 0 0.075" rpy="0 0 0" /><axis xyz="0 0 1" /></joint>

如何键盘控制小车在Gazebo里运动??
- 下载库 sudo apt-get install ros-noetic-teleop-twist-keyboard
- Launch 文件中添加 Gazebo 键盘控制程序
<launch>
<node name="twist_keyboard" pkg="teleop_twist_keyboard"type="teleop_twist_keyboard.py" output="screen" />
</launch>- 添加Gazebo控制器插件 (使用Gazebo自带的控制程序控制,我们只需要发对应的信号)
开启Gazebo后会订阅/cmd_vel等待被控制,之前的键盘控制程序会发布/cmd_vel话题。
我们只需新建一个xacro 类似于:
<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro"><!-- 传动实现:用于连接控制器与关节 --><xacro:macro name="joint_trans" params="joint_name"><!-- Transmission is important to link the joints and the controller --><transmission name="${joint_name}_trans"><type>transmission_interface/SimpleTransmission</type><joint name="${joint_name}"><hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface></joint><actuator name="${joint_name}_motor"><hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission></xacro:macro><!-- 每一个驱动轮都需要配置传动装置 --><xacro:joint_trans joint_name="left_wheel2base_link" /><xacro:joint_trans joint_name="right_wheel2base_link" /><!-- 控制器 --><gazebo><plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"><rosDebugLevel>Debug</rosDebugLevel><publishWheelTF>true</publishWheelTF><robotNamespace>/</robotNamespace><publishTf>1</publishTf><publishWheelJointState>true</publishWheelJointState><alwaysOn>true</alwaysOn><updateRate>100.0</updateRate><legacyMode>true</legacyMode><leftJoint>left_wheel2base_link</leftJoint> <!-- 左轮 --><rightJoint>right_wheel2base_link</rightJoint> <!-- 右轮 --><wheelSeparation>${base_link_radius * 2}</wheelSeparation> <!-- 车轮间距 --><wheelDiameter>${wheel_radius * 2}</wheelDiameter> <!-- 车轮直径 --><broadcastTF>1</broadcastTF><wheelTorque>30</wheelTorque><wheelAcceleration>1.8</wheelAcceleration><commandTopic>cmd_vel</commandTopic> <!-- 运动控制话题 --><odometryFrame>odom</odometryFrame> <odometryTopic>odom</odometryTopic> <!-- 里程计话题 --><robotBaseFrame>base_footprint</robotBaseFrame> <!-- 根坐标系 --></plugin></gazebo></robot>

base_footprint设置controler所控制的机器人的坐标系是哪个坐标系
然后集成,启动launch即可:

显示里程计的方法:

相关文章:
新手学习Gazebo+ros仿真控制小车-----易错和自己理解
赵虚左老师讲的很详细,这里只是理一下思路,说下突然出现“新”概念之间的关系。 urdf文件:里面是配置模型的,既有模型的位置、尺寸、颜色,也包含复杂的物理模型信息比如:转动惯量,碰撞box大小等等ÿ…...

jdbc(mysql)
1.概述 jdbc:java database connection(java与数据库连接) java可以连接不同数据库,不同数据库连接细节不同,具体细节都由数据库自己实现 由java设计出一系列连接数据库的接口规范,然后由不同的数据库开发…...

【Linux】搜索log在哪个文件中执行的方法
在Linux中,如果你需要找到包含特定文本(比如一段log)的文件,你可以使用grep命令结合一些其他工具来实现这一目的。这里有几个方法可以帮助你找到包含特定log内容的文件。 1. 使用grep直接在特定目录或文件中搜索 如果你知道log大…...
移动操作及动画效果)
web小游戏开发:2048(完)移动操作及动画效果
web小游戏开发:2048(完)移动操作及动画效果 添加随机数字游戏开始时的初始化显示分数移动和合并获取行列元素下标记录移动轨迹完整的 js小结添加随机数字 书接前文,我们在前边定义了一个 move 方法,暂时先往后放放。 在我们已经初始化好的界面上,我们需要先制作一个出现…...

Redis学习笔记——第20章 Lua脚本
第20章 Lua脚本 20.1 创建并修改Lua环境 20.1.1 创建Lua环境 服务器创建一个新的基本的Lua环境 20.1.2 载入函数库 修改Lua环境,载入一些库函数 20.1.3 创建redis全局表格 全局变量,支持在Lua脚本中执行redis命令 20.1.4 使用redis自制随机函数来…...

MySQL--日志管理
前言:本博客仅作记录学习使用,部分图片出自网络,如有侵犯您的权益,请联系删除 一、日志简介 MySQL日志主要分为4类,使用这些日志文件,可以查看MySQL内部发生的事情。这4类日志分别是: 错误日志࿱…...

【Nuxt】内置组件和全局样式使用
内置组件 Nuxt3框架也提供一些内置的组件,常用的如下: SEO组件:Html、Body、Head、Title、Meta、Style、Link、NoScript、BaseNuxtWelcome:欢迎页面组件,该组件是nuxt/ui的部分NuxtLayout:是Nuxt自带的页面布局组件NuxtPage:是N…...

Java中spring boot validation 自定义注解使用
创建一个注解 Target({ElementType.FIELD})//需要写注解的三三个要素 Retention(RUNTIME) Documented Constraint(validatedBy {IsSystemYesNoVaildation.class})//绑定 在这里会报错 你需要去实现 public interface IsSystemYesNo {String message() default "数据字典&…...
)
Android笔试面试题AI答之广播(1)
文章目录 1.简述广播的分类和使用场景 ?一、广播分类二、使用场景举例总结 2.广播的两种注册方式的区别?1. 注册位置与方式2. 生命周期与持久性3. 接收广播的时机4. 安全性与权限5. 优先级与有序广播总结 3.简述广播发送和接收的原理 ?一、广…...

微软商店无法加载,检查你的连接-解决方案
微软商店默认直连国内的服务器。 如果有代理,关闭代理就可以恢复网络了。 但是我就是想用代理,我感觉代理更快, 搜索了很多办法,都没有生效。 然后我在哔哩哔哩的视频下方,看到大家留言,测试了一下&#x…...
数据结构实验报告-树与二叉树
桂 林 理 工 大 学 实 验 报 告 一、实验名称: 实验6 树和二叉树 二、实验内容: 1.编写二叉树的递归遍历算法,实现:给定一棵二叉树的“扩展先序遍历序列”,创建这棵二叉树。 (1)输出二叉树的先序遍历的结点序列。 (2)输出二…...

基于Django+MySQL球馆场地预约系统的设计与实现(源码+论文+部署讲解等)
博主介绍:✌全网粉丝10W,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流✌ 技术栈介绍:我是程序员阿龙ÿ…...

8 MQTT
8 MQTT 1、相关概念2、MQTT的操作过程3、MQTT协议3.1 固定报文3.2 连接报文3.3 确认连接请求3.4 构造订阅报文3.5 订阅确认报文3.6 发布报文3.7 其他报文 1、相关概念 MQTT [1] 全名为Message Queuing Telemetry Transport,是一种基于TCP/IP协议上传输的轻量级通信…...

【文件系统】抽象磁盘的存储结构 CHS寻址法 | sector数组 | LAB数组
目录 1.为什么要抽象 2.逻辑抽象_版本1 2.1sector数组 2.2index转化CHS 3.逻辑抽象_版本2 3.1LBA数组 3.2LAB下标转化sector下标 文件其实就是在磁盘中占有几个扇区的问题❗文件是很多个sector的数组下标❗文件是有很多块构成的❗❗文件由很多扇区构成------>文件…...

基于python旅游推荐系统(源码+论文+部署讲解等)
博主介绍:✌全网粉丝10W,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流✌ 技术栈介绍:我是程序员阿龙ÿ…...

Mysql大单表JSON优化
优化方案 MySQL 8.0.32 中,有几种方法可以优化存储 JSON 字符串的数据表。以下是一些建议,可以帮助您减少存储空间: 使用压缩: MySQL 8.0 支持表级压缩,可以通过修改表来启用压缩。 ALTER TABLE your_table ROW_FORMATCOMPRESS…...

电脑开机启动项管理小工具,绿色免安装
HiBit Startup Manager 是一款功能强大的启动项管理工具,旨在帮助用户管理和优化计算机的自动启动程序。该软件通过添加或删除应用程序、编辑它们的属性以及管理流程、服务、任务调度程序和上下文菜单来实现这一目标。 HiBit Startup Manager 提供了以下主要功能&a…...
一例AutoHotkey语言生成的文件夹病毒分析
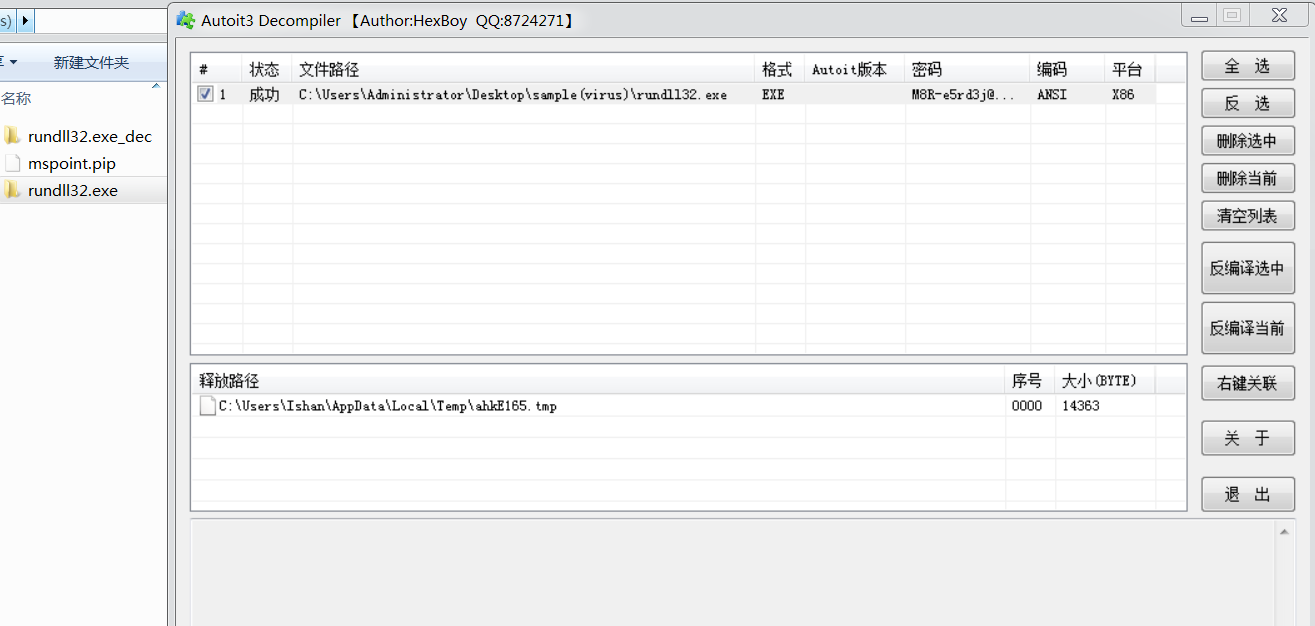
概述 这是一个使用AutoHotkey语言编写的文件夹病毒,使用ftp服务器来当作C2,通过U盘传播,样本很古老,原理也很简单,这种语言的样本还是第一次见到,记录一下。 样本的基本信息 PE32库: AutoIt(3.XX)[-]编译…...

【机器学习第7章——贝叶斯分类器】
机器学习第7章——贝叶斯分类器 7.贝叶斯分类器7.1贝叶斯决策论7.2 朴素贝叶斯分类器条件概率的m估计 7.3 极大似然估计优点基本原理 7.4 贝叶斯网络7.5 半朴素贝叶斯分类器7.6 EM算法7.7 EM算法实现 7.贝叶斯分类器 7.1贝叶斯决策论 一个医疗判断问题 有两个可选的假设&#…...

C++ QT开发 学习笔记(3)
C QT开发 学习笔记(3) - WPS项目 标准对话框 对话框类说明静态函数函数说明QFileDialog文件对话框getOpenFileName()选择打开一个文件getOpenFileNames()选择打开多个文件getSaveFileName()选择保存一个文件getExistingDirectory()选择一个己有的目录getOpenFileUrl()选择打幵…...
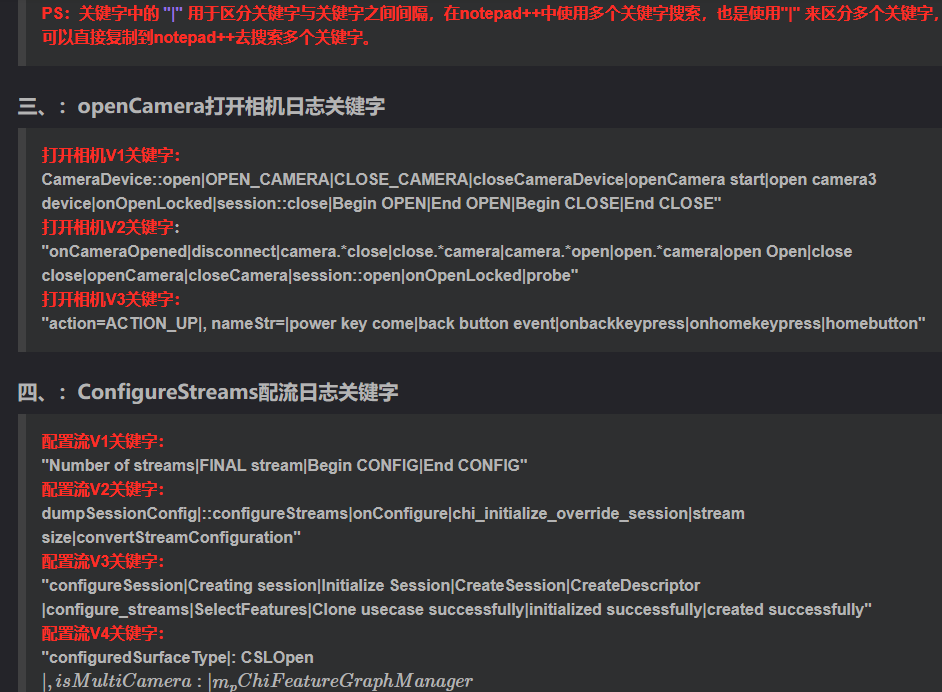
相机Camera日志实例分析之二:相机Camx【专业模式开启直方图拍照】单帧流程日志详解
【关注我,后续持续新增专题博文,谢谢!!!】 上一篇我们讲了: 这一篇我们开始讲: 目录 一、场景操作步骤 二、日志基础关键字分级如下 三、场景日志如下: 一、场景操作步骤 操作步…...

智能在线客服平台:数字化时代企业连接用户的 AI 中枢
随着互联网技术的飞速发展,消费者期望能够随时随地与企业进行交流。在线客服平台作为连接企业与客户的重要桥梁,不仅优化了客户体验,还提升了企业的服务效率和市场竞争力。本文将探讨在线客服平台的重要性、技术进展、实际应用,并…...

Psychopy音频的使用
Psychopy音频的使用 本文主要解决以下问题: 指定音频引擎与设备;播放音频文件 本文所使用的环境: Python3.10 numpy2.2.6 psychopy2025.1.1 psychtoolbox3.0.19.14 一、音频配置 Psychopy文档链接为Sound - for audio playback — Psy…...
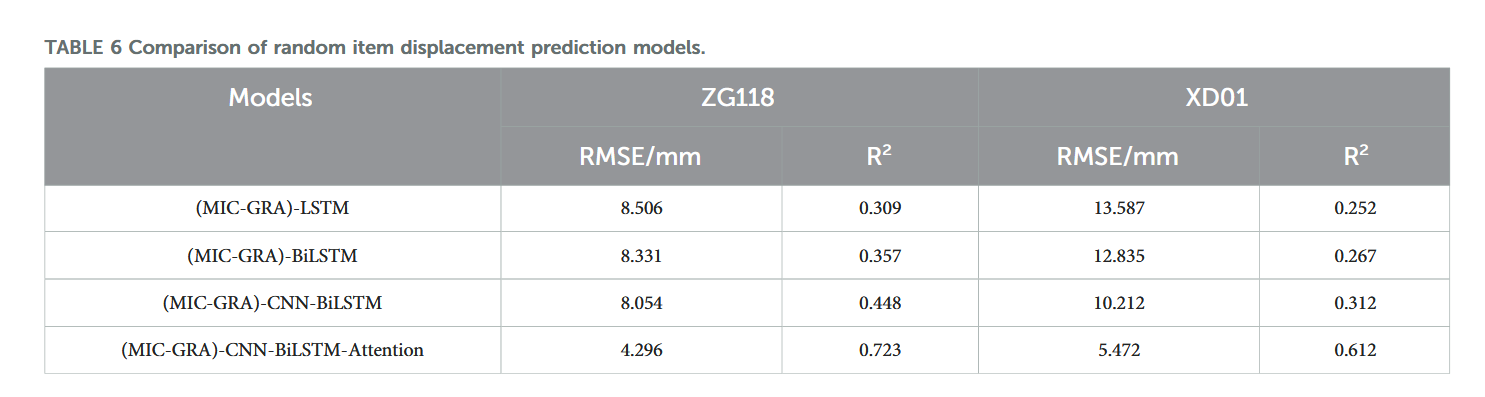
【论文阅读28】-CNN-BiLSTM-Attention-(2024)
本文把滑坡位移序列拆开、筛优质因子,再用 CNN-BiLSTM-Attention 来动态预测每个子序列,最后重构出总位移,预测效果超越传统模型。 文章目录 1 引言2 方法2.1 位移时间序列加性模型2.2 变分模态分解 (VMD) 具体步骤2.3.1 样本熵(S…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...
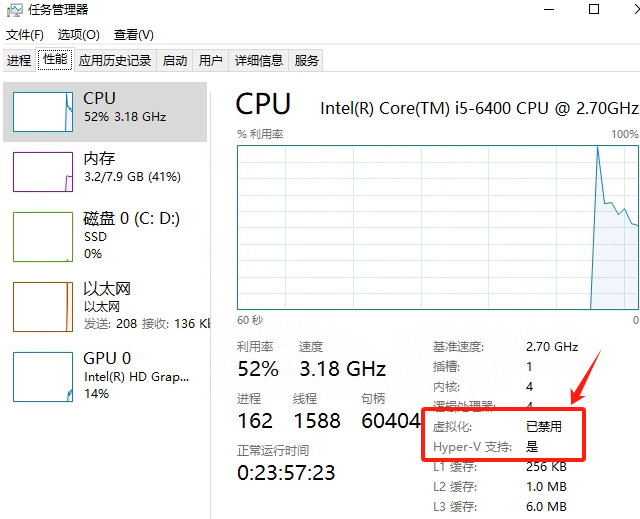
Windows电脑能装鸿蒙吗_Windows电脑体验鸿蒙电脑操作系统教程
鸿蒙电脑版操作系统来了,很多小伙伴想体验鸿蒙电脑版操作系统,可惜,鸿蒙系统并不支持你正在使用的传统的电脑来安装。不过可以通过可以使用华为官方提供的虚拟机,来体验大家心心念念的鸿蒙系统啦!注意:虚拟…...
Vue3 PC端 UI组件库我更推荐Naive UI
一、Vue3生态现状与UI库选择的重要性 随着Vue3的稳定发布和Composition API的广泛采用,前端开发者面临着UI组件库的重新选择。一个好的UI库不仅能提升开发效率,还能确保项目的长期可维护性。本文将对比三大主流Vue3 UI库(Naive UI、Element …...
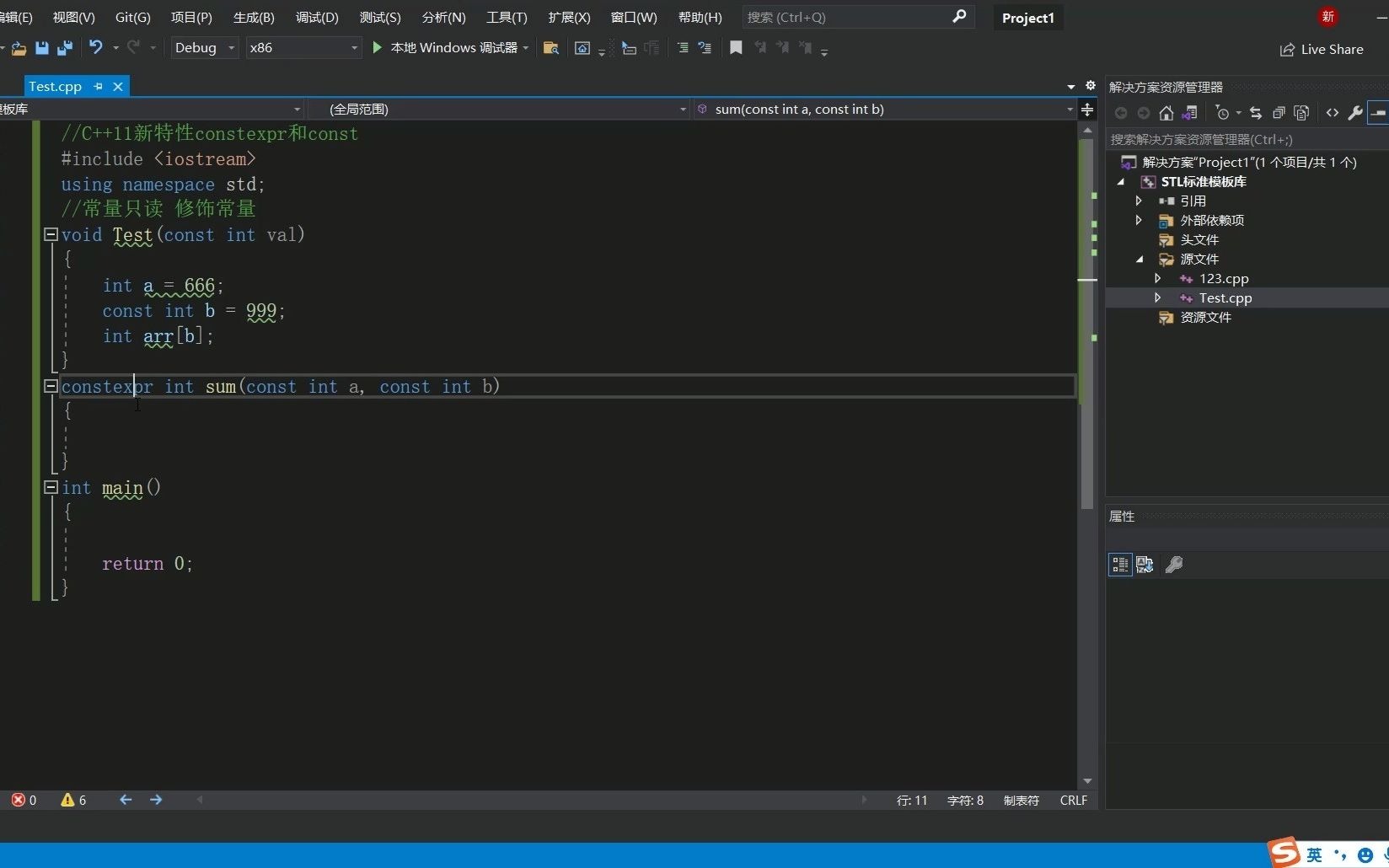
C++11 constexpr和字面类型:从入门到精通
文章目录 引言一、constexpr的基本概念与使用1.1 constexpr的定义与作用1.2 constexpr变量1.3 constexpr函数1.4 constexpr在类构造函数中的应用1.5 constexpr的优势 二、字面类型的基本概念与使用2.1 字面类型的定义与作用2.2 字面类型的应用场景2.2.1 常量定义2.2.2 模板参数…...

职坐标物联网全栈开发全流程解析
物联网全栈开发涵盖从物理设备到上层应用的完整技术链路,其核心流程可归纳为四大模块:感知层数据采集、网络层协议交互、平台层资源管理及应用层功能实现。每个模块的技术选型与实现方式直接影响系统性能与扩展性,例如传感器选型需平衡精度与…...

Linux中INADDR_ANY详解
在Linux网络编程中,INADDR_ANY 是一个特殊的IPv4地址常量(定义在 <netinet/in.h> 头文件中),用于表示绑定到所有可用网络接口的地址。它是服务器程序中的常见用法,允许套接字监听所有本地IP地址上的连接请求。 关…...