Chapter5:机器人感知
ROS1{\rm ROS1}ROS1的基础及应用,基于古月的课,各位可以去看,基于hawkbot{\rm hawkbot}hawkbot机器人进行实际操作。
ROS{\rm ROS}ROS版本:ROS1{\rm ROS1}ROS1的Melodic{\rm Melodic}Melodic;实际机器人:Hawkbot{\rm Hawkbot}Hawkbot;
1.机器视觉
1.1 ROS中的图像数据(二维图像)
# 1.安装相应的功能包
cd ~/willard_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git usb_camcd ..
catkin_make# 2.启动.launch文件
roslaunch usb_cam usb_cam-test.launch# 3.查看话题列表
rostopic list# 输出
==========================================================
/image_view/output
/image_view/parameter_descriptions
/image_view/parameter_updates
/rosout
/rosout_agg
/usb_cam/camera_info
/usb_cam/image_raw
/usb_cam/image_raw/compressed
/usb_cam/image_raw/compressed/parameter_descriptions
/usb_cam/image_raw/compressed/parameter_updates
/usb_cam/image_raw/compressedDepth
/usb_cam/image_raw/compressedDepth/parameter_descriptions
/usb_cam/image_raw/compressedDepth/parameter_updates
/usb_cam/image_raw/theora
/usb_cam/image_raw/theora/parameter_descriptions
/usb_cam/image_raw/theora/parameter_updates
==========================================================# 4.查看图像类型
rostopic info /usb_cam/image_raw==========================================================
Type: sensor_msgs/ImagePublishers: * /usb_cam (http://192.168.66.102:37379/)Subscribers: * /image_view (http://192.168.66.102:43915/)
==========================================================# 5.查看图像消息
rosmsg show sensor_msgs/Image ==========================================================
std_msgs/Header headeruint32 seqtime stampstring frame_id
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
==========================================================Header:消息头,包含消息序号,时间戳,绑定坐标系;
height:图像的纵向分辨率;
width:图像的横向分辨率;
encoding:图像的编码格式,包含RGB、YUV等常用格式,不涉及图像压缩编码;
is_bigendian:图像数据的大小端存储模式;
step:一行图像数据的字节数量,作为数据的步长参数;
data:存储图像数据的数组,大小为:step*height个字节;# 6.查看图像消息
rosmsg show sensor_msgs/CompressedImage ===========================================
std_msgs/Header headeruint32 seqtime stampstring frame_id
string format
uint8[] data
===========================================format:图像的压缩编码格式(jpeg、png、bmp);
data:存储图像数据数组;
1.2 ROS中的图像数据(三维图像)
# 1.安装freenect
sudo apt-get install ros-melodic-freenect-*# 2.安装底层驱动
git clone https://github.com/avin2/SensorKinect.gitcd SensorKinect/Bin/
tar xvf SensorKinect093-Bin-Linux-x64-v5.1.2.1.tar.bz2
cd Sensor-Bin-Linux-x64-v5.1.2.1/
sudo ./install.sh# 3.在mbot_description/launch创建freenect.launch文件
# freenect.launch文件内容见下一代码块
touch freenect.launch# 4.启动.launch文件
roslaunch freenect_launch freenect.launch
rostopic info /camera/depth_registered/points# 5.查看点云消息
rosmsg show sensor_msgs/PointCloud2===========================================
height:点云图像的纵向分辨率;
width:点云图像的横向分辨率;
fields:每个点的数据类型;
is_bigendian:数据的大小端存储模式;
point_step:单点的数据字节步长;
row_step:一列数据的字节步长;
data:点云数据的存储数组,总字节大小为:row_step*height;
is_dense:是否有无效点;# 5.启动rviz
rosrun rviz rviz
# freenect.launch文件内容
<launch><!-- 启动freenect驱动 --><include file="$(find freenect_launch)/launch/freenect.launch"><arg name="publish_tf" value="false" /> <!-- use device registration --><arg name="depth_registration" value="true" /> <arg name="rgb_processing" value="true" /><arg name="ir_processing" value="false" /><arg name="depth_processing" value="false" /><arg name="depth_registered_processing" value="true" /><arg name="disparity_processing" value="false" /><arg name="disparity_registered_processing" value="false" /><arg name="sw_registered_processing" value="false" /><arg name="hw_registered_processing" value="true" /></include></launch>
1.3 摄像头标定
摄像头对光学器件的要求较高,由于摄像头内部与外部的一些原因,生成的物体图像往往会发生畸变,为避免数据源造成的误差,需要针对摄像头的参数进行标定;
# 1.安装标定功能包
sudo apt-get install ros-melodic-camera-calibration# 2.启动摄像头
roslaunch robot_vision usb_cam.launch# 3.启动标定包
# 注:
# 实际标定最好把棋盘格打印出来,该处笔者直接使用平板进行标定是不规范的;
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/usb_cam/image_raw camera:=/usb_cam=========================
size:标定棋盘格的内部角点个数;
square:对应每个棋盘格的边长,单位:米;
image、camera:设置摄像头发布的图像话题;# 4.X、Y、Size、Skew均变绿色,点击CALIBRATE按钮;
# 带SAVE按钮变绿色后,点击SAVE,即可进行保存;
# 标定结果保存于:/tmp/calibrationdata.tar.gz# 5.使用标定文件
# 把/tmp/calibrationdata.tar.gz下的.yaml文件拷贝到功能包下
# 在usb_cam_with_calibration.launch文件添加.yaml文件即可
# usb_cam_with_calibration.launch文件内容
<launch><node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" ><param name="video_device" value="/dev/video0" /><param name="image_width" value="1280" /><param name="image_height" value="720" /><param name="pixel_format" value="yuyv" /><param name="camera_frame_id" value="usb_cam" /><param name="io_method" value="mmap"/><param name="camera_info_url" type="string" value="file://$(find robot_vision)/camera_calibration.yaml" /></node></launch>

标定过程中的四个参数含义:
- X{\rm X}X:标定靶在摄像头视野中的左右移动;
- Y{\rm Y}Y:标定靶在摄像头视野中的上下移动;
- Size{\rm Size}Size:标定靶在摄像头视野中的前后移动;
- Skew{\rm Skew}Skew:标定靶在摄像头视野中的倾斜转动;
1.4 ROS+OpenCV
1.4.1 OpenCV例程测试
OpenCV{\rm OpenCV}OpenCV概述:
- OpenSourceComputerVisionLibrary{\rm Open\ Source\ Computer\ Vision\ Library}Open Source Computer Vision Library;
- 基于BSD{\rm BSD}BSD许可发行的跨平台开源计算机视觉库(Linux、Windows{\rm Linux、Windows}Linux、Windows和MacOS{\rm Mac\ OS}Mac OS等);
- 由一系列C{\rm C}C函数和少量C{\rm C}C++类构成,同时提供C{\rm C}C++、Python、Ruby{\rm Python、Ruby}Python、Ruby、MATLAB{\rm MATLAB}MATLAB等语言的接口;
- 实现了图像处理和计算机视觉方面的很多通用算法,且对非商业应用和商业应用都是免费的;
- 可以直接访问硬件摄像头,且提供了一个简单的GUI{\rm GUI}GUI系统–highgui{\rm highgui}highgui;

# 1.安装OpenCV
sudo apt-get install ros-melodic-vision-opencv libopencv-dev python-opencv# 2.测试例程
roslaunch robot_vision usb_cam.launch
rosrun robot_vision cv_bridge_test.py
rqt_image_view

1.4.2 代码详解
#!/usr/bin/env python
# -*- coding: utf-8 -*-import rospy
import cv2
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Imageclass image_converter:def __init__(self): # 创建cv_bridge,声明图像的发布者和订阅者self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)self.bridge = CvBridge()self.image_sub = rospy.Subscriber("/usb_cam/image_raw", Image, self.callback)def callback(self,data):# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式try:cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")except CvBridgeError as e:print e# 在opencv的显示窗口中绘制一个圆,作为标记(rows,cols,channels) = cv_image.shapeif cols > 60 and rows > 60 :cv2.circle(cv_image, (60, 60), 30, (0,0,255), -1)# 显示Opencv格式的图像cv2.imshow("Image window", cv_image)cv2.waitKey(3)# 再将opencv格式额数据转换成ros image格式的数据发布try:self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))except CvBridgeError as e:print eif __name__ == '__main__':try:# 初始化ros节点rospy.init_node("cv_bridge_test")rospy.loginfo("Starting cv_bridge_test node")image_converter()rospy.spin()except KeyboardInterrupt:print "Shutting down cv_bridge_test node."cv2.destroyAllWindows()
- imgmsg_to_cv2(){\rm imgmsg\_to\_cv2()}imgmsg_to_cv2():将ROS{\rm ROS}ROS图像消息转换成OpenCV{\rm OpenCV}OpenCV图像数据;
- cv2_to_imgmsg(){\rm cv2\_to\_imgmsg()}cv2_to_imgmsg():将OpenCV{\rm OpenCV}OpenCV格式的图像数据转换成ROS{\rm ROS}ROS图像消息;
- 输入参数:
- 图像消息流;
- 转换的图像数据格式;
1.4.3 二维码识别
# 1.安装二维码识别功能包
sudo apt-get install ros-melodic-ar-track-alvar# 2.启动节点管理器
roscore# 3.创建二维码常用命令
rosrun ar_track_alvar createMarker
rosrun ar_track_alvar createMarker0# 4.创建大小为5的二维码
# 在config文件夹下创建了三张二维码
roscd robot_vision/config
rosrun ar_track_alvar createMarker -s 5 0
rosrun ar_track_alvar createMarker -s 5 1
rosrun ar_track_alvar createMarker -s 5 2
rosrun ar_track_alvar createMarker -s 5 3# 5.启动.launch文件
roslaunch robot_vision usb_cam_with_calibration.launch
roslaunch robot_vision ar_track_camera.launch# 6.查看识别到的二维码位姿
rostopic echo /ar_pose_marker


# usb_cam_with_calibration.launch文件
<launch><node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" ><param name="video_device" value="/dev/video0" /><param name="image_width" value="1280" /><param name="image_height" value="720" /><param name="pixel_format" value="yuyv" /><param name="camera_frame_id" value="usb_cam" /><param name="io_method" value="mmap"/><param name="camera_info_url" type="string" value="file://$(find robot_vision)/camera_calibration.yaml" /></node></launch># ar_track_camera.launch文件
<launch><node pkg="tf" type="static_transform_publisher" name="world_to_cam" args="0 0 0.5 0 1.57 0 world usb_cam 10" /><arg name="marker_size" default="5" /><arg name="max_new_marker_error" default="0.08" /><arg name="max_track_error" default="0.2" /><arg name="cam_image_topic" default="/usb_cam/image_raw" /><arg name="cam_info_topic" default="/usb_cam/camera_info" /><arg name="output_frame" default="/usb_cam" /><node name="ar_track_alvar" pkg="ar_track_alvar" type="individualMarkersNoKinect" respawn="false" output="screen"><param name="marker_size" type="double" value="$(arg marker_size)" /><param name="max_new_marker_error" type="double" value="$(arg max_new_marker_error)" /><param name="max_track_error" type="double" value="$(arg max_track_error)" /><param name="output_frame" type="string" value="$(arg output_frame)" /><remap from="camera_image" to="$(arg cam_image_topic)" /><remap from="camera_info" to="$(arg cam_info_topic)" /></node><!-- rviz view /--><node pkg="rviz" type="rviz" name="rviz" args="-d $(find robot_vision)/config/ar_track_camera.rviz"/></launch>2.机器语音

-
常用功能包
-
pocketsphinx{\rm pocketsphinx}pocketsphinx
集成CMUSphinx{\rm CMU\ Sphinx}CMU Sphinx和Festival{\rm Festival}Festival开源项目中的代码,实现语音识别的功能;
-
audio−common{\rm audio-common}audio−common
提供了文本转语音(Text−to−speech,TTS)({\rm Text-to-speech,TTS})(Text−to−speech,TTS)的功能实现"机器人说话"的想法;
-
AIML{\rm AIML}AIML
人工智能标记语言(ArtificialIntelligenceMarkupLanguage)({\rm Artificial\ Intelligence\ Markup\ Language})(Artificial Intelligence Markup Language),是一种创建自然语言软件代理的XML{\rm XML}XML语言;
-
-
科大讯飞SDK{\rm SDK}SDK
# 1.将科大讯飞SDK库文件拷贝到系统目录下 sudo cp libmsc.so /usr/lib/libmsc.so# 2.实现语音听写功能,具体代码见下一代码块 # 3.添加编译选项,各代码文件见下代码块 gedit CMakeLists.txtadd_executable(iat_publishsrc/iat_publish.cppsrc/speech_recognizer.csrc/linuxrec.c ) target_link_libraries(iat_publish$ {catkin_LIBRARIES}libmsc.so -ldl -lpthread -lm -lrt -lasound )# 4.测试语音听写 # 注:如果录入声音后没有反应,先检查是否开启了虚拟机声卡 roscore rosrun robot_voice iat_publish rostopic pub /voiceWakeup std_msgs/String "data:'Hello'" -
语音听写功能
// iat_publish.cpp文件内容,使用时删掉此行注释;/* * 语音听写(iFly Auto Transform)技术能够实时地将语音转换成对应的文字。 */#include <stdlib.h> #include <stdio.h> #include <string.h> #include <unistd.h> #include "robot_voice/qisr.h" #include "robot_voice/msp_cmn.h" #include "robot_voice/msp_errors.h" #include "robot_voice/speech_recognizer.h" #include <iconv.h>#include "ros/ros.h" #include "std_msgs/String.h"#define FRAME_LEN 640 #define BUFFER_SIZE 4096int wakeupFlag = 0 ; int resultFlag = 0 ;static void show_result(char *string, char is_over) {resultFlag=1; printf("\rResult: [ %s ]", string);if(is_over)putchar('\n'); }static char *g_result = NULL; static unsigned int g_buffersize = BUFFER_SIZE;void on_result(const char *result, char is_last) {if (result) {size_t left = g_buffersize - 1 - strlen(g_result);size_t size = strlen(result);if (left < size) {g_result = (char*)realloc(g_result, g_buffersize + BUFFER_SIZE);if (g_result)g_buffersize += BUFFER_SIZE;else {printf("mem alloc failed\n");return;}}strncat(g_result, result, size);show_result(g_result, is_last);} }void on_speech_begin() {if (g_result){free(g_result);}g_result = (char*)malloc(BUFFER_SIZE);g_buffersize = BUFFER_SIZE;memset(g_result, 0, g_buffersize);printf("Start Listening...\n"); } void on_speech_end(int reason) {if (reason == END_REASON_VAD_DETECT)printf("\nSpeaking done \n");elseprintf("\nRecognizer error %d\n", reason); }/* demo recognize the audio from microphone */ static void demo_mic(const char* session_begin_params) {int errcode;int i = 0;struct speech_rec iat;struct speech_rec_notifier recnotifier = {on_result,on_speech_begin,on_speech_end};errcode = sr_init(&iat, session_begin_params, SR_MIC, &recnotifier);if (errcode) {printf("speech recognizer init failed\n");return;}errcode = sr_start_listening(&iat);if (errcode) {printf("start listen failed %d\n", errcode);}/* demo 10 seconds recording */while(i++ < 10)sleep(1);errcode = sr_stop_listening(&iat);if (errcode) {printf("stop listening failed %d\n", errcode);}sr_uninit(&iat); }/* main thread: start/stop record ; query the result of recgonization.* record thread: record callback(data write)* helper thread: ui(keystroke detection)*/void WakeUp(const std_msgs::String::ConstPtr& msg) {printf("waking up\r\n");usleep(700*1000);wakeupFlag=1; }int main(int argc, char* argv[]) {// 初始化ROSros::init(argc, argv, "voiceRecognition");ros::NodeHandle n;ros::Rate loop_rate(10);// 声明Publisher和Subscriber// 订阅唤醒语音识别的信号ros::Subscriber wakeUpSub = n.subscribe("voiceWakeup", 1000, WakeUp); // 订阅唤醒语音识别的信号 ros::Publisher voiceWordsPub = n.advertise<std_msgs::String>("voiceWords", 1000); ROS_INFO("Sleeping...");int count=0;while(ros::ok()){// 语音识别唤醒if (wakeupFlag){ROS_INFO("Wakeup...");int ret = MSP_SUCCESS;const char* login_params = "appid = 594a7b46, work_dir = .";const char* session_begin_params ="sub = iat, domain = iat, language = zh_cn, ""accent = mandarin, sample_rate = 16000, ""result_type = plain, result_encoding = utf8";ret = MSPLogin(NULL, NULL, login_params);if(MSP_SUCCESS != ret){MSPLogout();printf("MSPLogin failed , Error code %d.\n",ret);}printf("Demo recognizing the speech from microphone\n");printf("Speak in 10 seconds\n");demo_mic(session_begin_params);printf("10 sec passed\n");wakeupFlag=0;MSPLogout();}// 语音识别完成if(resultFlag){resultFlag=0;std_msgs::String msg;msg.data = g_result;voiceWordsPub.publish(msg);}ros::spinOnce();loop_rate.sleep();count++;}exit:MSPLogout(); // Logout...return 0; }- subscriber{\rm subscriber}subscriber:用来接收语音唤醒信号,接收到唤醒信号后,将wakeupFlag{\rm wakeupFlag}wakeupFlag变量置位;
- 主循环中调用SDK{\rm SDK}SDK的语音听写功能,识别成功后置位resultFlag{\rm resultFlag}resultFlag变量,通过Publisher{\rm Publisher}Publisher将识别出来的字符串发布;
# CMakeLists.txt文件内容cmake_minimum_required(VERSION 2.8.3) project(robot_voice)## Add support for C++11, supported in ROS Kinetic and newer add_definitions(-std=c++11)## Find catkin macros and libraries ## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz) ## is used, also find other catkin packages find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs )## System dependencies are found with CMake's conventions # find_package(Boost REQUIRED COMPONENTS system)## Uncomment this if the package has a setup.py. This macro ensures ## modules and global scripts declared therein get installed ## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html # catkin_python_setup()################################################ ## Declare ROS messages, services and actions ## ################################################## To declare and build messages, services or actions from within this ## package, follow these steps: ## * Let MSG_DEP_SET be the set of packages whose message types you use in ## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...). ## * In the file package.xml: ## * add a build_depend tag for "message_generation" ## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET ## * If MSG_DEP_SET isn't empty the following dependency has been pulled in ## but can be declared for certainty nonetheless: ## * add a run_depend tag for "message_runtime" ## * In this file (CMakeLists.txt): ## * add "message_generation" and every package in MSG_DEP_SET to ## find_package(catkin REQUIRED COMPONENTS ...) ## * add "message_runtime" and every package in MSG_DEP_SET to ## catkin_package(CATKIN_DEPENDS ...) ## * uncomment the add_*_files sections below as needed ## and list every .msg/.srv/.action file to be processed ## * uncomment the generate_messages entry below ## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)## Generate messages in the 'msg' folder # add_message_files( # FILES # Message1.msg # Message2.msg # )## Generate services in the 'srv' folder # add_service_files( # FILES # Service1.srv # Service2.srv # )## Generate actions in the 'action' folder # add_action_files( # FILES # Action1.action # Action2.action # )## Generate added messages and services with any dependencies listed here # generate_messages( # DEPENDENCIES # std_msgs # )################################################ ## Declare ROS dynamic reconfigure parameters ## ################################################## To declare and build dynamic reconfigure parameters within this ## package, follow these steps: ## * In the file package.xml: ## * add a build_depend and a run_depend tag for "dynamic_reconfigure" ## * In this file (CMakeLists.txt): ## * add "dynamic_reconfigure" to ## find_package(catkin REQUIRED COMPONENTS ...) ## * uncomment the "generate_dynamic_reconfigure_options" section below ## and list every .cfg file to be processed## Generate dynamic reconfigure parameters in the 'cfg' folder # generate_dynamic_reconfigure_options( # cfg/DynReconf1.cfg # cfg/DynReconf2.cfg # )################################### ## catkin specific configuration ## ################################### ## The catkin_package macro generates cmake config files for your package ## Declare things to be passed to dependent projects ## INCLUDE_DIRS: uncomment this if you package contains header files ## LIBRARIES: libraries you create in this project that dependent projects also need ## CATKIN_DEPENDS: catkin_packages dependent projects also need ## DEPENDS: system dependencies of this project that dependent projects also need catkin_package( # INCLUDE_DIRS include # LIBRARIES robot_voice # CATKIN_DEPENDS roscpp rospy std_msgs # DEPENDS system_lib )########### ## Build ## ############# Specify additional locations of header files ## Your package locations should be listed before other locations # include_directories(include) include_directories(${catkin_INCLUDE_DIRS}include )## Declare a C++ library # add_library(${PROJECT_NAME} # src/${PROJECT_NAME}/robot_voice.cpp # )## Add cmake target dependencies of the library ## as an example, code may need to be generated before libraries ## either from message generation or dynamic reconfigure # add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})## Declare a C++ executable ## With catkin_make all packages are built within a single CMake context ## The recommended prefix ensures that target names across packages don't collide # add_executable(${PROJECT_NAME}_node src/robot_voice_node.cpp)## Rename C++ executable without prefix ## The above recommended prefix causes long target names, the following renames the ## target back to the shorter version for ease of user use ## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node" # set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")## Add cmake target dependencies of the executable ## same as for the library above # add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})## Specify libraries to link a library or executable target against # target_link_libraries(${PROJECT_NAME}_node # ${catkin_LIBRARIES} # )add_executable(tts_subscribe src/tts_subscribe.cpp) target_link_libraries(tts_subscribe${catkin_LIBRARIES} libmsc.so -ldl -pthread)add_executable(iat_publish src/iat_publish.cpp src/speech_recognizer.c src/linuxrec.c) target_link_libraries(iat_publish${catkin_LIBRARIES} libmsc.so -ldl -lpthread -lm -lrt -lasound)add_executable(voice_assistant src/voice_assistant.cpp) target_link_libraries(voice_assistant${catkin_LIBRARIES} libmsc.so -ldl -pthread)############# ## Install ## ############## all install targets should use catkin DESTINATION variables # See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html## Mark executable scripts (Python etc.) for installation ## in contrast to setup.py, you can choose the destination # install(PROGRAMS # scripts/my_python_script # DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} # )## Mark executables and/or libraries for installation # install(TARGETS ${PROJECT_NAME} ${PROJECT_NAME}_node # ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} # LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} # RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} # )## Mark cpp header files for installation # install(DIRECTORY include/${PROJECT_NAME}/ # DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION} # FILES_MATCHING PATTERN "*.h" # PATTERN ".svn" EXCLUDE # )## Mark other files for installation (e.g. launch and bag files, etc.) # install(FILES # # myfile1 # # myfile2 # DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION} # )############# ## Testing ## ############### Add gtest based cpp test target and link libraries # catkin_add_gtest(${PROJECT_NAME}-test test/test_robot_voice.cpp) # if(TARGET ${PROJECT_NAME}-test) # target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME}) # endif()## Add folders to be run by python nosetests # catkin_add_nosetests(test)语音听写效果:

-
语音合成
// tts_subscribe.cpp文件内容/* * 语音合成(Text To Speech,TTS)技术能够自动将任意文字实时转换为连续的 * 自然语音,是一种能够在任何时间、任何地点,向任何人提供语音信息服务的 * 高效便捷手段,非常符合信息时代海量数据、动态更新和个性化查询的需求。 */#include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> #include <errno.h>#include "robot_voice/qtts.h" #include "robot_voice/msp_cmn.h" #include "robot_voice/msp_errors.h"#include "ros/ros.h" #include "std_msgs/String.h"#include <sstream> #include <sys/types.h> #include <sys/stat.h>/* wav音频头部格式 */ typedef struct _wave_pcm_hdr {char riff[4]; // = "RIFF"int size_8; // = FileSize - 8char wave[4]; // = "WAVE"char fmt[4]; // = "fmt "int fmt_size; // = 下一个结构体的大小 : 16short int format_tag; // = PCM : 1short int channels; // = 通道数 : 1int samples_per_sec; // = 采样率 : 8000 | 6000 | 11025 | 16000int avg_bytes_per_sec; // = 每秒字节数 : samples_per_sec * bits_per_sample / 8short int block_align; // = 每采样点字节数 : wBitsPerSample / 8short int bits_per_sample; // = 量化比特数: 8 | 16char data[4]; // = "data";int data_size; // = 纯数据长度 : FileSize - 44 } wave_pcm_hdr;/* 默认wav音频头部数据 */ wave_pcm_hdr default_wav_hdr = {{ 'R', 'I', 'F', 'F' },0,{'W', 'A', 'V', 'E'},{'f', 'm', 't', ' '},16,1,1,16000,32000,2,16,{'d', 'a', 't', 'a'},0 }; /* 文本合成 */ int text_to_speech(const char* src_text, const char* des_path, const char* params) {int ret = -1;FILE* fp = NULL;const char* sessionID = NULL;unsigned int audio_len = 0;wave_pcm_hdr wav_hdr = default_wav_hdr;int synth_status = MSP_TTS_FLAG_STILL_HAVE_DATA;if (NULL == src_text || NULL == des_path){printf("params is error!\n");return ret;}fp = fopen(des_path, "wb");if (NULL == fp){printf("open %s error.\n", des_path);return ret;}/* 开始合成 */sessionID = QTTSSessionBegin(params, &ret);if (MSP_SUCCESS != ret){printf("QTTSSessionBegin failed, error code: %d.\n", ret);fclose(fp);return ret;}ret = QTTSTextPut(sessionID, src_text, (unsigned int)strlen(src_text), NULL);if (MSP_SUCCESS != ret){printf("QTTSTextPut failed, error code: %d.\n",ret);QTTSSessionEnd(sessionID, "TextPutError");fclose(fp);return ret;}printf("正在合成 ...\n");fwrite(&wav_hdr, sizeof(wav_hdr) ,1, fp); //添加wav音频头,使用采样率为16000while (1) {/* 获取合成音频 */const void* data = QTTSAudioGet(sessionID, &audio_len, &synth_status, &ret);if (MSP_SUCCESS != ret)break;if (NULL != data){fwrite(data, audio_len, 1, fp);wav_hdr.data_size += audio_len; //计算data_size大小}if (MSP_TTS_FLAG_DATA_END == synth_status)break;printf(">");usleep(150*1000); //防止频繁占用CPU}//合成状态synth_status取值请参阅《讯飞语音云API文档》printf("\n");if (MSP_SUCCESS != ret){printf("QTTSAudioGet failed, error code: %d.\n",ret);QTTSSessionEnd(sessionID, "AudioGetError");fclose(fp);return ret;}/* 修正wav文件头数据的大小 */wav_hdr.size_8 += wav_hdr.data_size + (sizeof(wav_hdr) - 8);/* 将修正过的数据写回文件头部,音频文件为wav格式 */fseek(fp, 4, 0);fwrite(&wav_hdr.size_8,sizeof(wav_hdr.size_8), 1, fp); //写入size_8的值fseek(fp, 40, 0); //将文件指针偏移到存储data_size值的位置fwrite(&wav_hdr.data_size,sizeof(wav_hdr.data_size), 1, fp); //写入data_size的值fclose(fp);fp = NULL;/* 合成完毕 */ret = QTTSSessionEnd(sessionID, "Normal");if (MSP_SUCCESS != ret){printf("QTTSSessionEnd failed, error code: %d.\n",ret);}return ret; }void voiceWordsCallback(const std_msgs::String::ConstPtr& msg) {char cmd[2000];const char* text;int ret = MSP_SUCCESS;const char* session_begin_params = "voice_name = xiaoyan, text_encoding = utf8, sample_rate = 16000, speed = 50, volume = 50, pitch = 50, rdn = 2";const char* filename = "tts_sample.wav"; //合成的语音文件名称std::cout<<"I heard :"<<msg->data.c_str()<<std::endl;text = msg->data.c_str(); /* 文本合成 */printf("开始合成 ...\n");ret = text_to_speech(text, filename, session_begin_params);if (MSP_SUCCESS != ret){printf("text_to_speech failed, error code: %d.\n", ret);}printf("合成完毕\n");unlink("/tmp/cmd"); mkfifo("/tmp/cmd", 0777); popen("mplayer -quiet -slave -input file=/tmp/cmd 'tts_sample.wav'","r");sleep(3); }void toExit() {printf("按任意键退出 ...\n");getchar();MSPLogout(); //退出登录 }int main(int argc, char* argv[]) {int ret = MSP_SUCCESS;const char* login_params = "appid = 594a7b46, work_dir = .";//登录参数,appid与msc库绑定,请勿随意改动/** rdn: 合成音频数字发音方式* volume: 合成音频的音量* pitch: 合成音频的音调* speed: 合成音频对应的语速* voice_name: 合成发音人* sample_rate: 合成音频采样率* text_encoding: 合成文本编码格式** 详细参数说明请参阅《讯飞语音云MSC--API文档》*//* 用户登录 */ret = MSPLogin(NULL, NULL, login_params);//第一个参数是用户名,第二个参数是密码,第三个参数是登录参数,用户名和密码可在http://open.voicecloud.cn注册获取if (MSP_SUCCESS != ret){printf("MSPLogin failed, error code: %d.\n", ret);/*goto exit ;*///登录失败,退出登录toExit();}printf("\n###########################################################################\n");printf("## 语音合成(Text To Speech,TTS)技术能够自动将任意文字实时转换为连续的 ##\n");printf("## 自然语音,是一种能够在任何时间、任何地点,向任何人提供语音信息服务的 ##\n");printf("## 高效便捷手段,非常符合信息时代海量数据、动态更新和个性化查询的需求。 ##\n");printf("###########################################################################\n\n");ros::init(argc,argv,"TextToSpeech");ros::NodeHandle n;ros::Subscriber sub =n.subscribe("voiceWords", 1000,voiceWordsCallback);ros::spin();exit:printf("按任意键退出 ...\n");getchar();MSPLogout(); //退出登录return 0; }- main{\rm main}main函数中声明了一个订阅voiceWords{\rm voiceWords}voiceWords话题的subscriber{\rm subscriber}subscriber,接收输入的语音字符串;
- 回调函数voiceWordsCallback{\rm voiceWordsCallback}voiceWordsCallback中使用SDK{\rm SDK}SDK接口将字符串转换成中文语音;
# 1.编写代码 touch tts_subscribe.cpp# 2.修改CMakeLists.txt文件,完整内容见上一部分 gedit CMakeLists.txt===================================================== add_executable(tts_subscribe src/tts_subscribe.cpp) target_link_libraries(tts_subscribe$ {catkin_LIBRARIES}libmsc.so -ldl -pthread ) =====================================================# 3.工作空间下编译 cd ~/willard_ws/ catkin_make source devel/setup.bash# 4.运行例程 roscore rosrun robot_voice tts_subscribe rostopic pub /voiceWords std_msgs/String "data:'欢迎来到伏羲科技'"# 5.抛出"sh: 1: mplayer: not found"错误 sudo apt-get install mplayer# 6.运行"rosrun robot_voice tts_subscribe"抛出如下错误===================================================== # do_connect: could not connect to socket # connect: No such file or directory # Failed to open LIRC support. You will not be able to use your remote control. =====================================================# 解决方案: # 在$HOME/.mplayer/config文件中添加如下内容:lirc=no语音合成效果:

-
智能语音助手
#include <iostream> #include <stdio.h> #include <string.h> #include <stdlib.h> #include <unistd.h> #include <errno.h> #include <time.h> #include "robot_voice/qtts.h" #include "robot_voice/msp_cmn.h" #include "robot_voice/msp_errors.h"#include "ros/ros.h" #include "std_msgs/String.h"#include <sstream> #include <sys/types.h> #include <sys/stat.h>/* wav音频头部格式 */ typedef struct _wave_pcm_hdr {char riff[4]; // = "RIFF"int size_8; // = FileSize - 8char wave[4]; // = "WAVE"char fmt[4]; // = "fmt "int fmt_size; // = 下一个结构体的大小 : 16short int format_tag; // = PCM : 1short int channels; // = 通道数 : 1int samples_per_sec; // = 采样率 : 8000 | 6000 | 11025 | 16000int avg_bytes_per_sec; // = 每秒字节数 : samples_per_sec * bits_per_sample / 8short int block_align; // = 每采样点字节数 : wBitsPerSample / 8short int bits_per_sample; // = 量化比特数: 8 | 16char data[4]; // = "data";int data_size; // = 纯数据长度 : FileSize - 44 } wave_pcm_hdr;/* 默认wav音频头部数据 */ wave_pcm_hdr default_wav_hdr = {{ 'R', 'I', 'F', 'F' },0,{'W', 'A', 'V', 'E'},{'f', 'm', 't', ' '},16,1,1,16000,32000,2,16,{'d', 'a', 't', 'a'},0 }; /* 文本合成 */ int text_to_speech(const char* src_text, const char* des_path, const char* params) {int ret = -1;FILE* fp = NULL;const char* sessionID = NULL;unsigned int audio_len = 0;wave_pcm_hdr wav_hdr = default_wav_hdr;int synth_status = MSP_TTS_FLAG_STILL_HAVE_DATA;if (NULL == src_text || NULL == des_path){printf("params is error!\n");return ret;}fp = fopen(des_path, "wb");if (NULL == fp){printf("open %s error.\n", des_path);return ret;}/* 开始合成 */sessionID = QTTSSessionBegin(params, &ret);if (MSP_SUCCESS != ret){printf("QTTSSessionBegin failed, error code: %d.\n", ret);fclose(fp);return ret;}ret = QTTSTextPut(sessionID, src_text, (unsigned int)strlen(src_text), NULL);if (MSP_SUCCESS != ret){printf("QTTSTextPut failed, error code: %d.\n",ret);QTTSSessionEnd(sessionID, "TextPutError");fclose(fp);return ret;}printf("正在合成 ...\n");fwrite(&wav_hdr, sizeof(wav_hdr) ,1, fp); //添加wav音频头,使用采样率为16000while (1) {/* 获取合成音频 */const void* data = QTTSAudioGet(sessionID, &audio_len, &synth_status, &ret);if (MSP_SUCCESS != ret)break;if (NULL != data){fwrite(data, audio_len, 1, fp);wav_hdr.data_size += audio_len; //计算data_size大小}if (MSP_TTS_FLAG_DATA_END == synth_status)break;printf(">");usleep(150*1000); //防止频繁占用CPU}//合成状态synth_status取值请参阅《讯飞语音云API文档》printf("\n");if (MSP_SUCCESS != ret){printf("QTTSAudioGet failed, error code: %d.\n",ret);QTTSSessionEnd(sessionID, "AudioGetError");fclose(fp);return ret;}/* 修正wav文件头数据的大小 */wav_hdr.size_8 += wav_hdr.data_size + (sizeof(wav_hdr) - 8);/* 将修正过的数据写回文件头部,音频文件为wav格式 */fseek(fp, 4, 0);fwrite(&wav_hdr.size_8,sizeof(wav_hdr.size_8), 1, fp); //写入size_8的值fseek(fp, 40, 0); //将文件指针偏移到存储data_size值的位置fwrite(&wav_hdr.data_size,sizeof(wav_hdr.data_size), 1, fp); //写入data_size的值fclose(fp);fp = NULL;/* 合成完毕 */ret = QTTSSessionEnd(sessionID, "Normal");if (MSP_SUCCESS != ret){printf("QTTSSessionEnd failed, error code: %d.\n",ret);}return ret; }std::string to_string(int val) {char buf[20];sprintf(buf, "%d", val);return std::string(buf); }void voiceWordsCallback(const std_msgs::String::ConstPtr& msg) {char cmd[2000];const char* text;int ret = MSP_SUCCESS;const char* session_begin_params = "voice_name = xiaoyan, text_encoding = utf8, sample_rate = 16000, speed = 50, volume = 50, pitch = 50, rdn = 2";const char* filename = "tts_sample.wav"; //合成的语音文件名称std::cout<<"I heard :"<<msg->data.c_str()<<std::endl;std::string dataString = msg->data;if(dataString.compare("小胖小胖。") == 0){char nameString[40] = "我在。主人您请说。";text = nameString;std::cout<<text<<std::endl;}else if(dataString.compare("你可以做什么?") == 0){char helpString1[40] = "我可以给您介绍伏羲科技公司";text = helpString1;std::cout<<text<<std::endl;}else if(dataString.compare("开始介绍。") == 0){char introduceString[40] = "伏羲科技专注于AGV的研发。";text = introduceString;std::cout<<text<<std::endl;}else if(dataString.compare("你还可以做什么?") == 0){char helpString[40] = "你还可以问我现在时间";text = helpString;std::cout<<text<<std::endl;}else if(dataString.compare("现在时间。") == 0){//获取当前时间struct tm *ptm; long ts; ts = time(NULL); ptm = localtime(&ts); std::string string = "现在时间" + to_string(ptm-> tm_hour) + "点" + to_string(ptm-> tm_min) + "分";char timeString[40];string.copy(timeString, sizeof(string), 0);text = timeString;std::cout<<text<<std::endl;}else{text = msg->data.c_str();}/* 文本合成 */printf("开始合成 ...\n");ret = text_to_speech(text, filename, session_begin_params);if (MSP_SUCCESS != ret){printf("text_to_speech failed, error code: %d.\n", ret);}printf("合成完毕\n");unlink("/tmp/cmd"); mkfifo("/tmp/cmd", 0777); popen("mplayer -quiet -slave -input file=/tmp/cmd 'tts_sample.wav'","r");sleep(3); }void toExit() {printf("按任意键退出 ...\n");getchar();MSPLogout(); //退出登录 }int main(int argc, char* argv[]) {int ret = MSP_SUCCESS;const char* login_params = "appid = 594a7b46, work_dir = .";//登录参数,appid与msc库绑定,请勿随意改动/** rdn: 合成音频数字发音方式* volume: 合成音频的音量* pitch: 合成音频的音调* speed: 合成音频对应的语速* voice_name: 合成发音人* sample_rate: 合成音频采样率* text_encoding: 合成文本编码格式** 详细参数说明请参阅《讯飞语音云MSC--API文档》*//* 用户登录 */ret = MSPLogin(NULL, NULL, login_params);//第一个参数是用户名,第二个参数是密码,第三个参数是登录参数,用户名和密码可在http://open.voicecloud.cn注册获取if (MSP_SUCCESS != ret){printf("MSPLogin failed, error code: %d.\n", ret);/*goto exit ;*///登录失败,退出登录toExit();}printf("\n###########################################################################\n");printf("## 语音合成(Text To Speech,TTS)技术能够自动将任意文字实时转换为连续的 ##\n");printf("## 自然语音,是一种能够在任何时间、任何地点,向任何人提供语音信息服务的 ##\n");printf("## 高效便捷手段,非常符合信息时代海量数据、动态更新和个性化查询的需求。 ##\n");printf("###########################################################################\n\n");ros::init(argc,argv,"TextToSpeech");ros::NodeHandle n;ros::Subscriber sub =n.subscribe("voiceWords", 1000,voiceWordsCallback);ros::spin();exit:printf("按任意键退出 ...\n");getchar();MSPLogout(); //退出登录return 0; }# 1.编写代码 touch voice_assistant.cpp# 2.修改CMakeLists.txt文件,完整内容见上一部分 gedit CMakeLists.txt===================================================== add_executable(voice_assistant src/voice_assistant.cpp) target_link_libraries(voice_assistant$ {catkin_LIBRARIES}libmsc.so -ldl -pthread ) =====================================================# 3.工作空间下编译 cd ~/willard_ws/ catkin_make source devel/setup.bash# 4.运行例程 roscore rosrun robot_voice iat_publish rosrun robot_voice voice_assistant rostopic pub /voiceWakeup std_msgs/String "data: 'hello'"语音助手效果如下图所示:

相关文章:
Chapter5:机器人感知
ROS1{\rm ROS1}ROS1的基础及应用,基于古月的课,各位可以去看,基于hawkbot{\rm hawkbot}hawkbot机器人进行实际操作。 ROS{\rm ROS}ROS版本:ROS1{\rm ROS1}ROS1的Melodic{\rm Melodic}Melodic;实际机器人:Ha…...

[acwing周赛复盘] 第 90 场周赛20230211 补
[acwing周赛复盘] 第 90 场周赛20230211 补 一、本周周赛总结二、 4806. 首字母大写1. 题目描述2. 思路分析3. 代码实现三、4807. 找数字1. 题目描述2. 思路分析3. 代码实现四、4808. 构造字符串1. 题目描述2. 思路分析3. 代码实现六、参考链接一、本周周赛总结 T1 模拟T2 模拟…...

数组
一、数组中重复的数字题目描述:在一个长度为n的数组里的所有数字都在0到n-1的范围内。 数组中某些数字是重复的,但不知道有几个数字是重复的。也不知道每个数字重复几次。请找出数组中任意一个重复的数字。 例如,如果输入长度为7的数组{2,3,1…...
:AXI_UARTLITE的使用)
MicroBlaze系列教程(4):AXI_UARTLITE的使用
文章目录 @[toc]AXI_UARTLITE简介MicroBlaze添加串口IP常用函数使用示例参考资料工程下载本文是Xilinx MicroBlaze系列教程的第4篇文章。 AXI_UARTLITE简介 axi_uartlite是Xilinx提供axi-lite接口的通用串口IP核,用AXI-Lite总线接口和用户进行交互,速度可以根据不同的芯片调…...
GO 中的 init 函数
前言 go 语言中有一个非常神奇的函数 init ,它可以在所有程序执行开始前被执行,并且每个 package 下面可以存在多个 init 函数,我们一起来看看这个奇怪的 init 函数。 init 特性 init 函数在 main 函数之前执行,并且是自动执行;…...
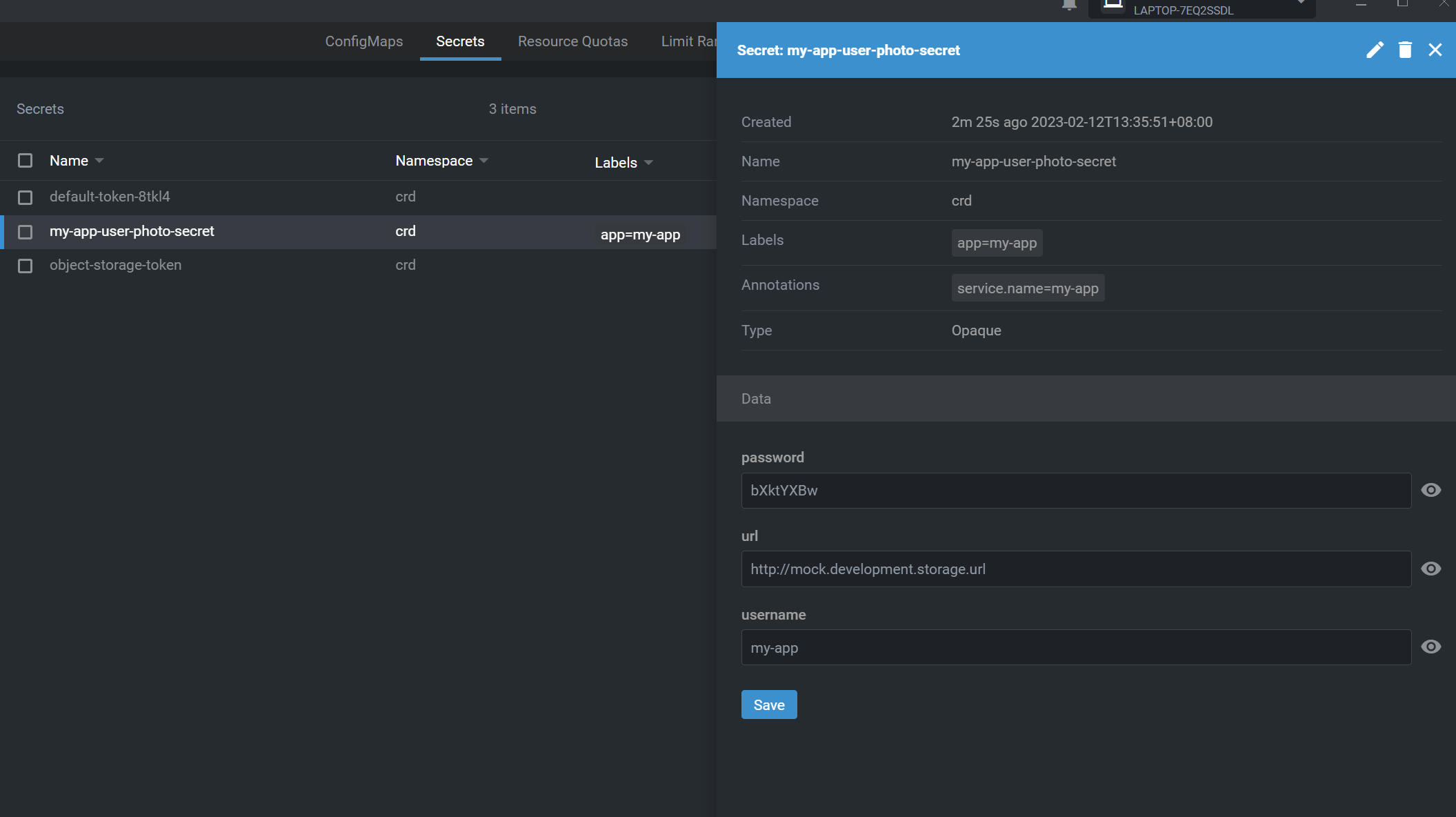
使用C#编写k8s CRD Controller
本文项目地址:k8s-crd - Repos (azure.com)CRDCRD指的是Custom Resource Definition。开发者更多的关注k8s对于容器的编排与调度,这也是k8s最初惊艳开发者的地方。而k8s最具价值的地方是它提供了一套标准化、跨厂商的 API、结构和语义。k8s将它拥有的一切…...

Ansible---playbook剧本
目录 引言:什么是playbook? 一、Playbook 1.1、playbook中的核心元素 1.2、playbook中的基础组件 1.3、playbook格式说明 1.4、实例:httpd服务剧本 二、playbook中的模块 2.1、Templates 模块 2.2、tags 模块 2.3、Roles 模块 引言&…...
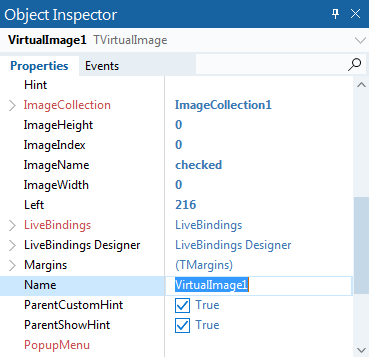
Delphi 中TImageCollection和TVirtualImageList 控件实现high-DPI
一、概述RAD Studio允许你通过使用TImageCollection组件和TVirtualImageList组件,在你的Windows VCL应用程序中包含缩放、高DPI、多分辨率的图像。这两个组件位于Windows 10面板中:注意:如果你使用FireMonkey进行跨平台应用,请看T…...
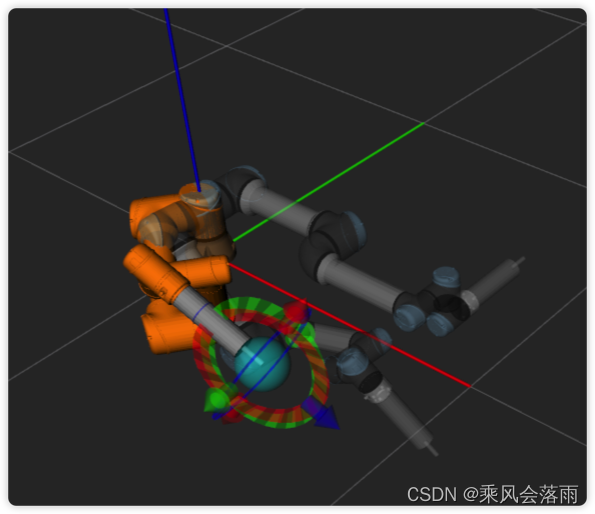
Ros中如何给UR5配置自定义工具 | 在Rviz中给UR5机器人装载定义工具 | UR5配置自定义末端执行器
前言 在学习和项目研究的过程中,我需要在Ur5e上装上工具,以对现实场景进行仿真。网上会有一些装载/配置现成的夹爪,例如Robotiq等。但和我们装载自定义工具的场景还有些差异,因此写一篇博客记录,可能有偏差。如果有问…...
数据库 delete 表数据后,磁盘空间为什么还是被一直占用?
插: 前些天发现了一个巨牛的人工智能学习网站,通俗易懂,风趣幽默,忍不住分享一下给大家。点击跳转到网站。 坚持不懈,越努力越幸运,大家一起学习鸭~~~ 最近有个上位机获取下位机上报数据的项目,…...
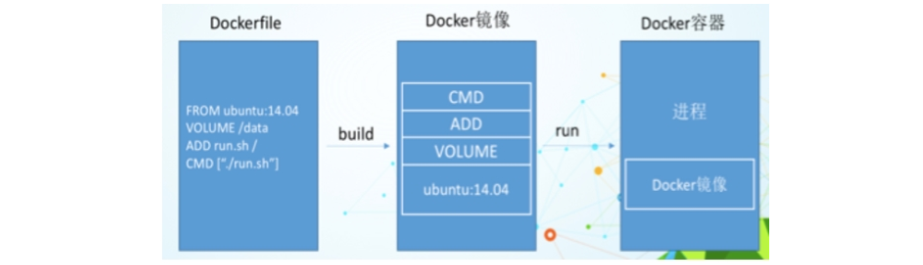
docker-微服务篇
docker学习笔记1.docker简介1.1为什么会出现docker?1.2docker理念1.3虚拟机(virtual machine)1.4容器虚拟化技术1.5一次构建到处运行2.docker安装2.1前提条件2.2docker基本构成2.3docker安装步骤*2.4测试镜像3.docker常用命令3.1 启动docker3…...
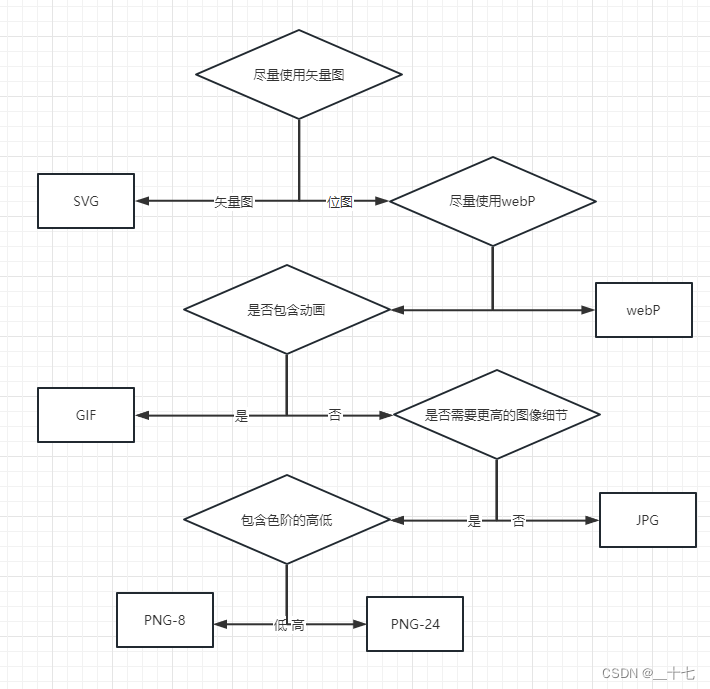
图像优化篇
目录(1)矢量图(2)位图 2.1 分辨率2,图像格式格式选择建议:(1)矢量图 被定义为一个对象,包括颜色,大小,形状,以及屏幕位置等属性&…...

在surface go 2上安装ubuntu 20.04
在surface go 2上安装ubuntu 20.04 1.制作安装盘 下载ubuntu系统的iso文件 使用Rufus软件将u盘制作为ubuntu系统的安装盘 2.在surface go 2上操作 禁用快速启动 在 Windows 中,禁用“电源选项”中的“快速启动”>选择电源按钮的功能 禁用 Bitlocker 在 Wi…...

Java:SpringMVC的使用(1)
目录第一章、SpringMVC基本了解1.1 概述1.2 SpringMVC处理请求原理简图第二章、SpringMVC搭建框架1、搭建SpringMVC框架1.1 创建工程【web工程】1.2 导入jar包1.3 编写配置文件(1) web.xml注册DispatcherServlet(2) springmvc.xml(3) index.html1.4 编写请求处理器【Controller…...

自动化测试岗位求职简历编写规范+注意事项,让你的简历脱颖而出
目录 前言 1.个人信息 2.教育背景(写最高学历) 3.个人技能(按精通/掌握/熟练/了解层次来写) 4.工作经历 5.工作经验/项目经历 6.自我评价 总结 前言 挑选一个阅读舒适度不错的模板 HR和面试官看的简历多,都是快速阅读,舒适度特别重要;…...
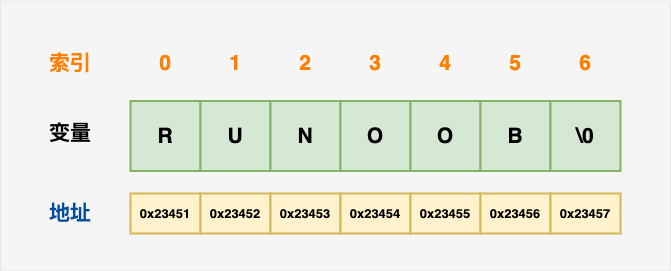
C 字符串
在 C 语言中,字符串实际上是使用空字符 \0 结尾的一维字符数组。因此,\0 是用于标记字符串的结束。空字符(Null character)又称结束符,缩写 NUL,是一个数值为 0 的控制字符,\0 是转义字符&#…...

【每日一题Day115】LC2335装满杯子需要的最短总时长 | 贪心
装满杯子需要的最短总时长【LC2335】 You have a water dispenser that can dispense cold, warm, and hot water. Every second, you can either fill up 2 cups with different types of water, or 1 cup of any type of water. You are given a 0-indexed integer array amo…...

Flink流计算处理-旁路输出
使用Flink做流数据处理时,除了主流数据输出,还自定义侧流输出即旁路输出,以实现灵活的数据拆分。 定义旁路输出标签 首先需要定义一个OutputTag,代码如下: // 这需要是一个匿名的内部类,以便我们分析类型…...
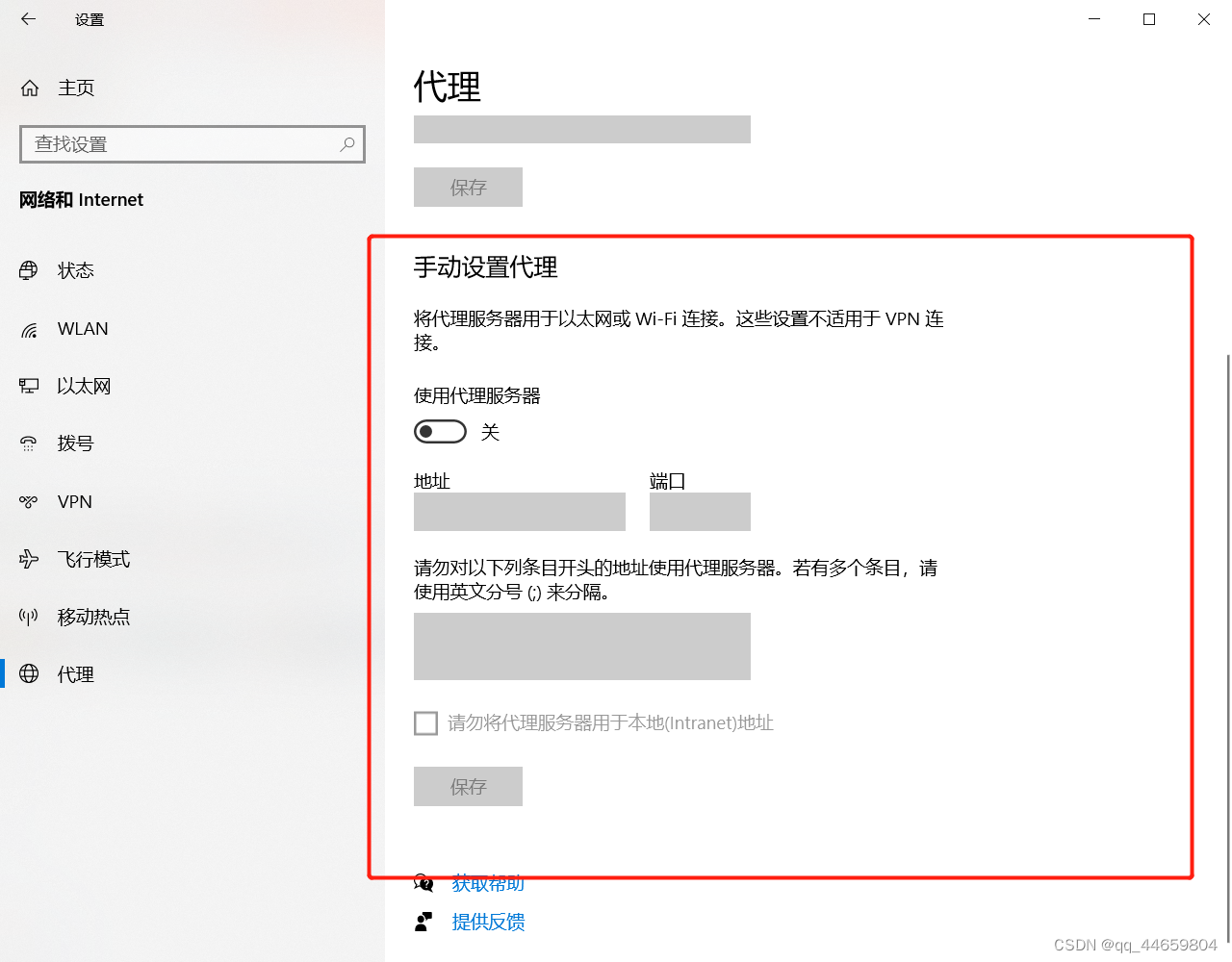
nginx正向代理的配置和使用
nginx正向代理的配置和使用 nginx正向代理的配置和使用nginx正向代理的配置和使用安装包准备下载nginx安装包下载正向代理模块的包版本与模块对照表部署nginx服务上传nginx包和正向模块包解压,改名安装nginx配置正向代理创建nginx用户检查nginx配置并启动nginx服务所在服务器验…...
Oracle Trace File Analyzer 介绍及简单使用
一、什么是Oracle Trace File Analyzer Oracle Autonomous Health Framework(AHF) 包含 Oracle ORAchk, Oracle EXAchk, and Oracle Trace File Analyzer(TFA). AHF工具包包含了Oracle常用的多种诊断工具,如 ORAchk, Oracle EXAchk, and Oracle Trace File Analyzer…...

AI-调查研究-01-正念冥想有用吗?对健康的影响及科学指南
点一下关注吧!!!非常感谢!!持续更新!!! 🚀 AI篇持续更新中!(长期更新) 目前2025年06月05日更新到: AI炼丹日志-28 - Aud…...

逻辑回归:给不确定性划界的分类大师
想象你是一名医生。面对患者的检查报告(肿瘤大小、血液指标),你需要做出一个**决定性判断**:恶性还是良性?这种“非黑即白”的抉择,正是**逻辑回归(Logistic Regression)** 的战场&a…...
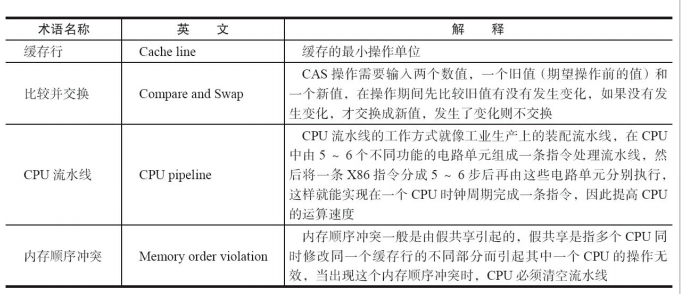
JUC笔记(上)-复习 涉及死锁 volatile synchronized CAS 原子操作
一、上下文切换 即使单核CPU也可以进行多线程执行代码,CPU会给每个线程分配CPU时间片来实现这个机制。时间片非常短,所以CPU会不断地切换线程执行,从而让我们感觉多个线程是同时执行的。时间片一般是十几毫秒(ms)。通过时间片分配算法执行。…...

安宝特方案丨船舶智造的“AR+AI+作业标准化管理解决方案”(装配)
船舶制造装配管理现状:装配工作依赖人工经验,装配工人凭借长期实践积累的操作技巧完成零部件组装。企业通常制定了装配作业指导书,但在实际执行中,工人对指导书的理解和遵循程度参差不齐。 船舶装配过程中的挑战与需求 挑战 (1…...
嵌入式学习笔记DAY33(网络编程——TCP)
一、网络架构 C/S (client/server 客户端/服务器):由客户端和服务器端两个部分组成。客户端通常是用户使用的应用程序,负责提供用户界面和交互逻辑 ,接收用户输入,向服务器发送请求,并展示服务…...
LINUX 69 FTP 客服管理系统 man 5 /etc/vsftpd/vsftpd.conf
FTP 客服管理系统 实现kefu123登录,不允许匿名访问,kefu只能访问/data/kefu目录,不能查看其他目录 创建账号密码 useradd kefu echo 123|passwd -stdin kefu [rootcode caozx26420]# echo 123|passwd --stdin kefu 更改用户 kefu 的密码…...

Python实现简单音频数据压缩与解压算法
Python实现简单音频数据压缩与解压算法 引言 在音频数据处理中,压缩算法是降低存储成本和传输效率的关键技术。Python作为一门灵活且功能强大的编程语言,提供了丰富的库和工具来实现音频数据的压缩与解压。本文将通过一个简单的音频数据压缩与解压算法…...
0609)
书籍“之“字形打印矩阵(8)0609
题目 给定一个矩阵matrix,按照"之"字形的方式打印这个矩阵,例如: 1 2 3 4 5 6 7 8 9 10 11 12 ”之“字形打印的结果为:1,…...

Vue 3 + WebSocket 实战:公司通知实时推送功能详解
📢 Vue 3 WebSocket 实战:公司通知实时推送功能详解 📌 收藏 点赞 关注,项目中要用到推送功能时就不怕找不到了! 实时通知是企业系统中常见的功能,比如:管理员发布通知后,所有用户…...

写一个shell脚本,把局域网内,把能ping通的IP和不能ping通的IP分类,并保存到两个文本文件里
写一个shell脚本,把局域网内,把能ping通的IP和不能ping通的IP分类,并保存到两个文本文件里 脚本1 #!/bin/bash #定义变量 ip10.1.1 #循环去ping主机的IP for ((i1;i<10;i)) doping -c1 $ip.$i &>/dev/null[ $? -eq 0 ] &&am…...