【ROS仿真实战】Gazebo仿真平台介绍及安装方法(一)
文章目录
- 前言
- 一、Gazebo简介
- 二、Gazebo仿真平台的基本概念
- 三、Gazebo仿真平台的安装方法
- 四、总结
前言
Gazebo仿真平台是一个广泛应用于机器人研发、测试和教育等领域的开源软件。它可以模拟机器人的运动、感知和控制等行为,并提供了丰富的物理引擎、传感器模拟和ROS集成等功能,使得使用者可以高效地进行机器人仿真和开发。本文将介绍Gazebo仿真平台的基本概念和安装方法。

一、Gazebo简介
Gazebo的历史和发展可以追溯到2002年,当时由美国南加州大学的Andrew Howard教授和Nate Koenig博士等人创建了一个基于OpenGL的3D仿真引擎,用于模拟室内机器人的运动和控制。后来,他们将其开源发布,逐渐形成了一个成熟的机器人仿真平台。随着机器人技术的快速发展和应用的广泛,Gazebo平台也逐渐得到了更广泛的应用和发展,成为了机器人仿真领域的一个重要组成部分。

相比其他机器人仿真软件,Gazebo平台具有以下几个优点:
- 高度可定制化。Gazebo平台提供了丰富的插件和API,可以方便地扩展和定制仿真模型、控制器、传感器等组件。这使得使用者可以根据自己的需求快速定制和修改仿真场景。
- 高度灵活性。Gazebo平台支持多种物理引擎和传感器模拟,可以适应不同的机器人平台和场景需求。这使得使用者可以根据不同的机器人类型和应用场景选择合适的物理引擎和传感器模拟,从而更加准确地模拟机器人的行为。
- 高度可视化。Gazebo平台提供了强大的3D可视化功能,可以直观地展示仿真场景和机器人的运动和行为。这使得使用者可以更加深入地理解和分析仿真结果,从而更好地优化机器人的设计和控制。
二、Gazebo仿真平台的基本概念
物理引擎(Physics Engine):Gazebo仿真平台使用物理引擎来模拟机器人的运动和相互作用。它可以计算机器人在仿真环境中的运动、碰撞、摩擦、弹性等物理特性,从而实现真实的仿真效果。
仿真模型(Simulation Model):Gazebo仿真平台使用仿真模型来描述机器人的物理特性和结构。仿真模型包括机器人的几何形状、质量、惯性、运动学、动力学等属性,可以通过简单的文本格式(如URDF、SDF等)进行描述和创建。
传感器模拟(Sensor Simulation):Gazebo仿真平台提供了多种传感器模拟,包括激光雷达、摄像头、IMU等,可以模拟机器人的感知能力。用户可以自定义传感器的参数、位置和方向,并通过ROS等通信框架将传感器数据传输到其他系统中。
控制器(Controller):Gazebo仿真平台提供了多种控制器,包括关节控制器、力控制器、轨迹控制器等,可以控制机器人的运动。用户可以通过编写控制器插件来实现自定义的控制算法。
三、Gazebo仿真平台的安装方法
Gazebo仿真平台支持多种操作系统,包括Ubuntu、Windows和Mac OS等。以下是在Ubuntu系统中安装Gazebo仿真平台的步骤:
安装ROS:Gazebo仿真平台通常需要配合ROS使用,因此需要先安装ROS。可以参考ROS官方网站(http://wiki.ros.org/ROS/Installation)的指引进行安装。
安装Gazebo:在安装ROS后,可以通过以下命令安装Gazebo仿真平台:
sudo apt-get install gazebo9
该命令将会安装Gazebo仿真平台的最新版本(当前为9.0)。
安装ROS控制器包:为了使用Gazebo仿真平台中的控制器,需要安装ROS控制器包。可以通过以下命令进行安装:
sudo apt-get install ros-<distro>-ros-control ros-<distro>-ros-controllers
其中,是ROS的发行版,例如kinetic或melodic等。
测试安装:安装完成后,可以通过以下命令启动Gazebo仿真平台:
gazebo
如果出现如下的仿真界面,则说明安装成功。

四、总结
本文介绍了Gazebo仿真平台的基本概念和安装方法。Gazebo仿真平台具有强大的机器人仿真和开发功能,是机器人领域不可或缺的工具之一。后面教程都会以Gazebo作为仿真进行讲解。
相关文章:
【ROS仿真实战】Gazebo仿真平台介绍及安装方法(一)
文章目录 前言一、Gazebo简介二、Gazebo仿真平台的基本概念三、Gazebo仿真平台的安装方法四、总结 前言 Gazebo仿真平台是一个广泛应用于机器人研发、测试和教育等领域的开源软件。它可以模拟机器人的运动、感知和控制等行为,并提供了丰富的物理引擎、传感器模拟和…...

Lychee图床 - 本地配置属于自己的相册管理系统并远程访问
文章目录 1.前言2. Lychee网站搭建2.1. Lychee下载和安装2.2 Lychee网页测试2.3 cpolar的安装和注册 3.本地网页发布3.1 Cpolar云端设置3.2 Cpolar本地设置 4.公网访问测试5.结语 1.前言 图床作为图片集中存放的服务网站,可以看做是云存储的一部分,既可…...
 A~C)
VP记录:Codeforces Round 865 (Div. 2) A~C
传送门:CF 难受了,本来想写到D题的,但是D题是一道交互题,只能作罢,提前润了 A题:A. Ian Visits Mary 简单的数学题,发现只要控制矩阵的宽为1就不可能在途中经过格点,直接实现即可(具体看代码) #include <bits/stdc.h> using namespace std; typedef long long ll; #de…...

智能学习 | MATLAB实现PSO-SVM多输入单输出回归预测(粒子群算法优化支持向量机)
智能学习 | MATLAB实现PSO-SVM多输入单输出回归预测(粒子群算法优化支持向量机) 目录 智能学习 | MATLAB实现PSO-SVM多输入单输出回归预测(粒子群算法优化支持向量机)预测效果基本介绍模型原理程序设计参考资料预测效果 基本介绍 MATLAB实现PSO-SVM多输入单输出回归预测(粒…...
Java后端:html转pdf实战笔记
目录 1、htmltopdf有什么用? 2、什么是wkhtmltopdf 3、wkhtmltopdf 参数介绍 4、示例项目 5、预览效果 1、htmltopdf有什么用? htmltopdf 是一款基于wkhtmltopdf技术的html转pdf文档java类库,支持html转pdf和url转pdf。 2、什么是wkhtmltopdf…...

设计模式-适配器模式
适配器模式 文章目录 适配器模式1、什么是适配器模式2、为什么要用适配器模式2.1、封装有缺陷的接口设计2.2、统一多个类的接口设计2.3、替换依赖的外部系统2.4、兼容老版本接口2.5、适配不同格式的数据 3、如何使用适配器模式1、类适配器2、对象适配器 总结 1、什么是适配器模…...
一款支持全文检索、工作流审批、知识图谱的企事业知识库
一、项目介绍 一款全源码,可二开,可基于云部署、私有部署的企业级知识库云平台,一款让企业知识变为实打实的数字财富的系统,应用在需要进行文档整理、分类、归集、检索、分析的场景。 获取方式q:262086839 为什么建立知识库平台&…...
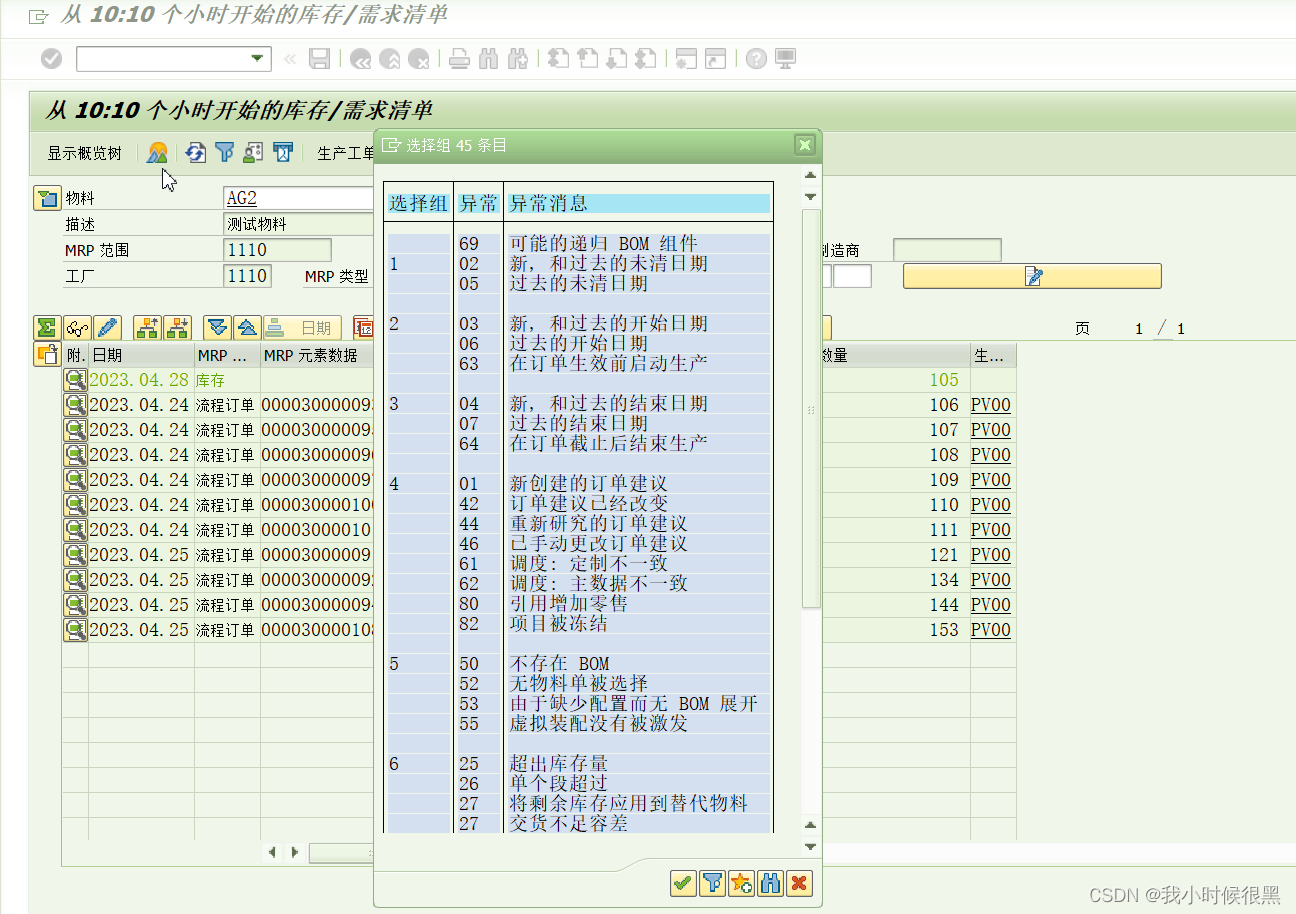
SAP MRP例外信息解释
SAP中MRP的例外信息,一共分为八类,下面是所有例外信息的解释 第一类: 69:BOM组件可能是递归的,即自己的子集中包括了自己。 02:订单创建日期在过去,可能是没有及时处理,这个建议表…...

广义的S变换
广义的S变换 S变换中窗函数是高斯函数 1 2 π σ e − 1 2 σ t 2 \frac{1}{{\sqrt {2\pi } \sigma }}{e^{ - \frac{1}{{2\sigma }}{t^2}}} 2π σ1e−2σ1t2,它的形状由方差 σ 1 f \sigma\frac{1}{f} σf1控制。许多研究表明,S变换中窗函数的…...

python异常及其捕获
文章目录 异常的捕获异常是可传递的 异常的捕获 1.为什么要捕获异常? 在可能发生异常的地方,进行捕获。当异常出现的时候,提供解决方式,而不是任由其导致程序无法运行。 2.捕获异常的语法? try: 可能要发生异常的语句 except 异常名 as 别…...

mysql实现存在则保存,不存在则更新
方式1 ON DUPLICATE KEY UPDATE 使用前提:表必须配置唯一键或者主键,且保存的字段中包含该键【重点】 原理: ON DUPLICATE KEY UPDATE如果配合主键,存在数据a,新插入b,如果主键不冲突,会保存b…...
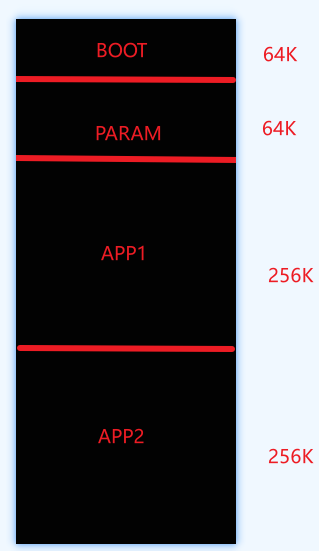
MCU固件升级系列1(STM32)
本系列将从升级流程、boot代码编写、APP代码编写以及固件打包来介绍,硬件选用STM32F407ZGT6(手里只有),来完成这系列教程。 前言 为什么需要固件升级: 功能更新:随着产品的迭代和用户需求的变化,可能需要…...
)
ImageJ 用户手册——第五部分(菜单命令Window)
. 菜单命令32. Window32.1 Show All32.2 Put Behind32.3 Cascade32.4 Tile 33. Help33.1 ImageJ Website33.2 ImageJ News33.3 Documentation33.4 Installation33.5 Mailing List33.6 Dev. Resources33.7 Plugins33.8 Macros33.9 Macro Functions33.10 Update ImageJ33.11 Refr…...
利用css实现视差滚动和抖动效果
背景: 前端的设计效果,越来越炫酷,而这些炫酷的效果,利用css3的动画效果和js就可以实现,简单的代码就能实现非常炫酷的效果。 原理: 利用 js监控scrollTop的位置,通过 top定位图片的位置&#x…...
)
以桨为楫 修己度人(一)
目录 1.人工智能开创的新时代 2.使命开启飞桨一春独占 3.技术突破奠定飞桨品牌一骑绝尘 4.行业应用积淀飞桨品牌一枝独秀 5.生态传播造就飞桨品牌一众独妍 6.深度学习平台的现状和未来思考 7月28日,2022全球数字经济大会“人工智能驱动未来产业论坛”在京召开&…...
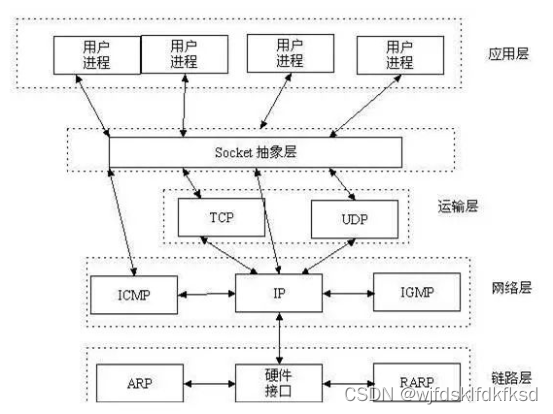
网络编程之简单socket通信
一.什么是Socket? Socket,又叫套接字,是在应用层和传输层的一个抽象层。它把TCP/IP层复杂的操作抽象为几个简单的接口供应用层调用以实现进程在网络中通信。 socket分为流socket和数据报socket,分别基于tcp和udp实现。 SOCK_STREAM 有以下…...
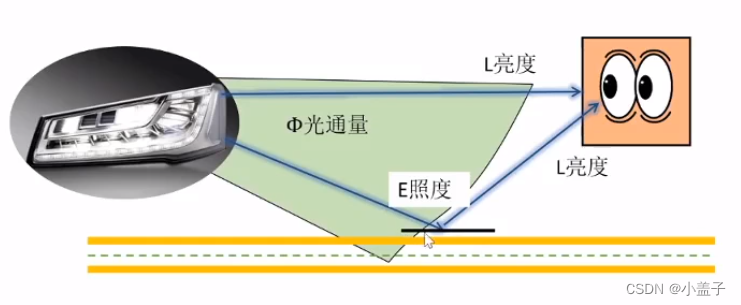
计算机图形辐照度学、光度学
文章目录 前言:一、什么是辐照度学二、什么是光度学 前言: 在计算机图形学中是把辐射(Radiance)等概念和亮度(Luminance)等概念不做区分的。辐射是辐照度学的概念,而亮度则是光度学上的概念。 辐照强高度并不意味着亮度就强,就比如…...
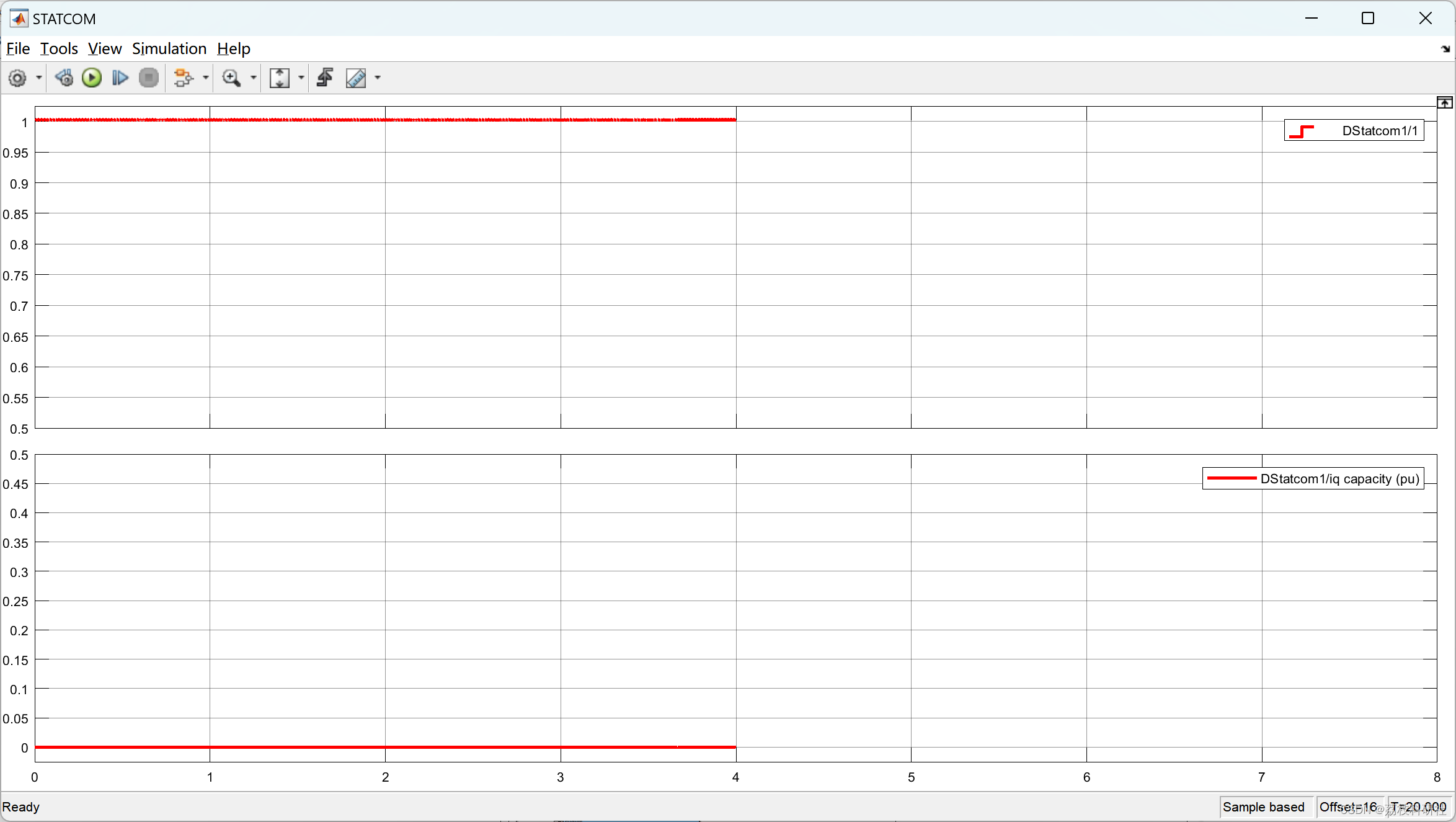
【无功功率控制】连接到无限电网的小型风电场的无功功率控制(Simulink)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

使用pandas、xlrd、openpyxl读取Excel
首先创建一个示例Excel文件example.xlsx,其中包含以下数据: NameAgeGenderAlice28FemaleBob35MaleCharlie42MaleDave29MaleEve31Female 安装 pip install pandas pip install xlrd pip install openpyxl方法一:使用Pandas库 使用Pandas库来…...

Java面试题接口
Collection接口 List接口 迭代器 Iterator 是什么? Iterator 接口提供遍历任何 Collection 的接口。我们可以从一个 Collection 中使用迭代器方法来获取迭 代器实例。迭代器取代了 Java 集合框架中的 Enumeration,迭代器允许调用者在迭代过程中移…...
Flask RESTful 示例
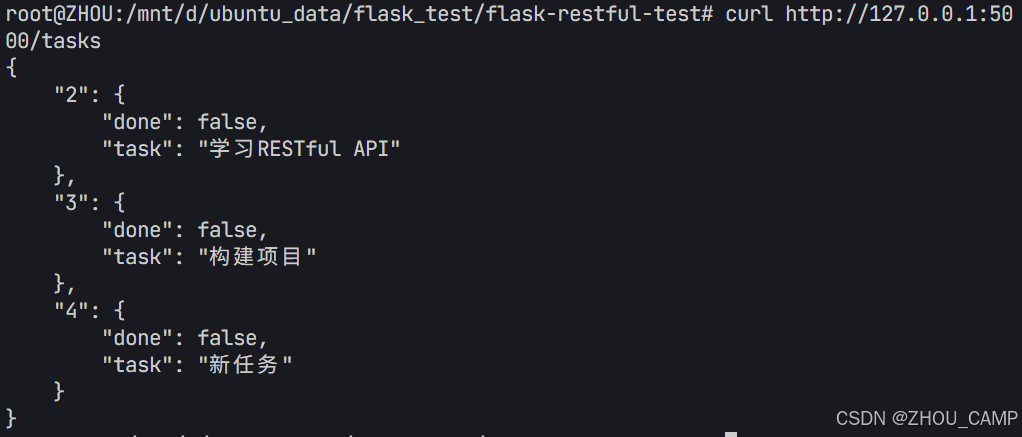
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...
【JavaEE】-- HTTP
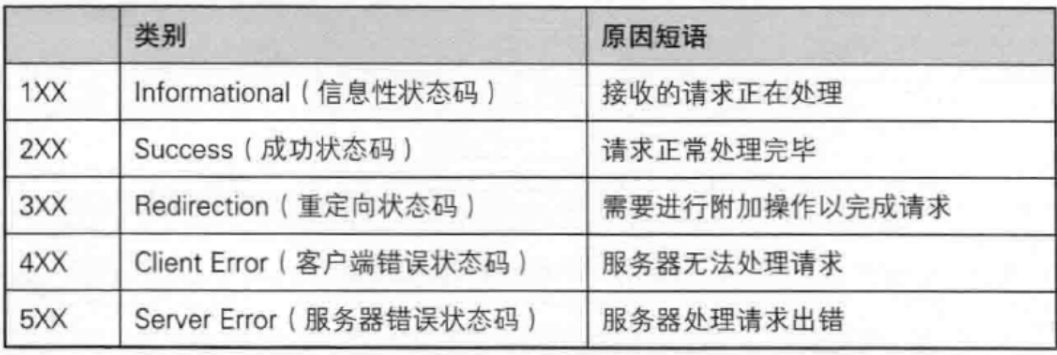
1. HTTP是什么? HTTP(全称为"超文本传输协议")是一种应用非常广泛的应用层协议,HTTP是基于TCP协议的一种应用层协议。 应用层协议:是计算机网络协议栈中最高层的协议,它定义了运行在不同主机上…...
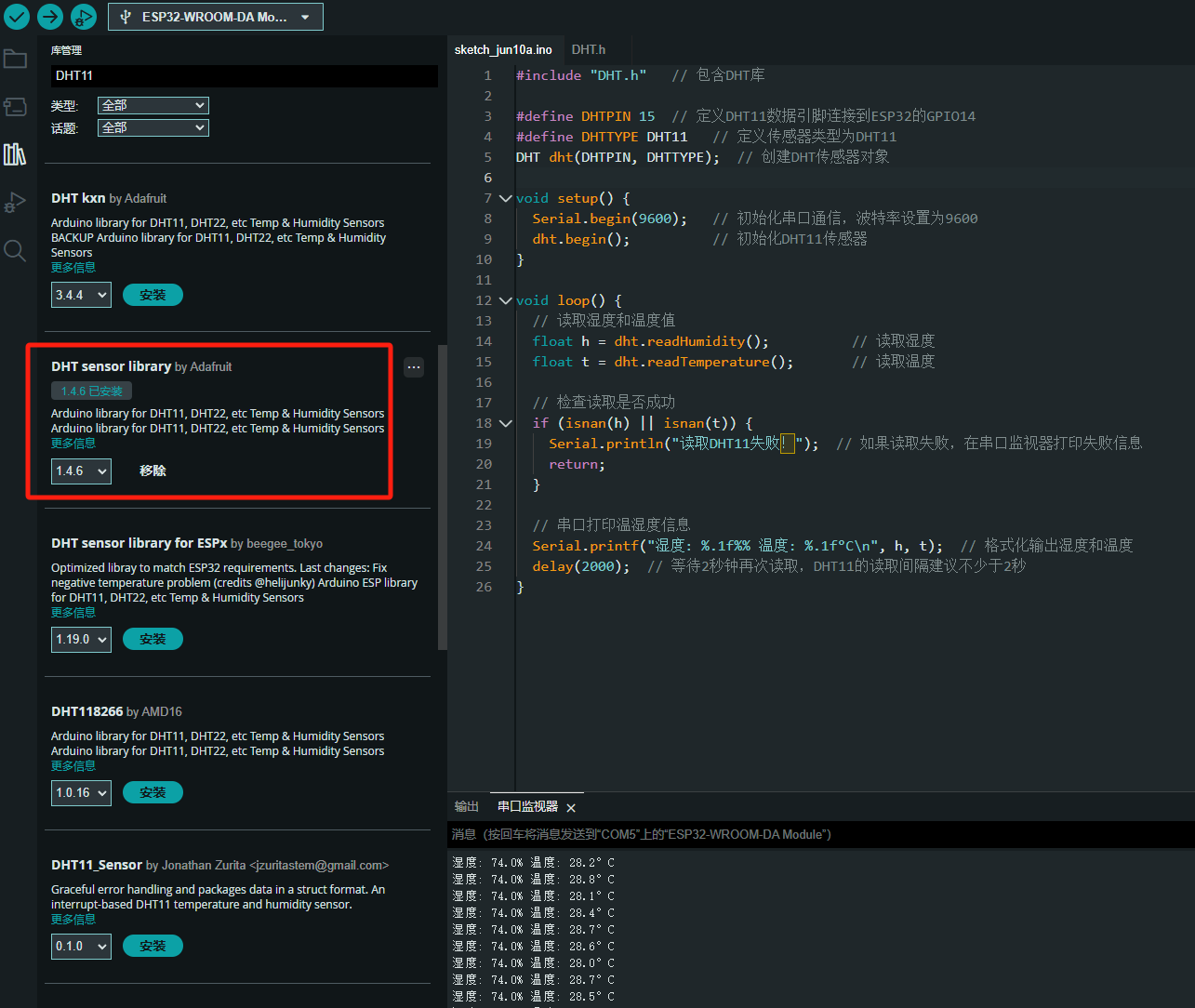
ESP32读取DHT11温湿度数据
芯片:ESP32 环境:Arduino 一、安装DHT11传感器库 红框的库,别安装错了 二、代码 注意,DATA口要连接在D15上 #include "DHT.h" // 包含DHT库#define DHTPIN 15 // 定义DHT11数据引脚连接到ESP32的GPIO15 #define D…...
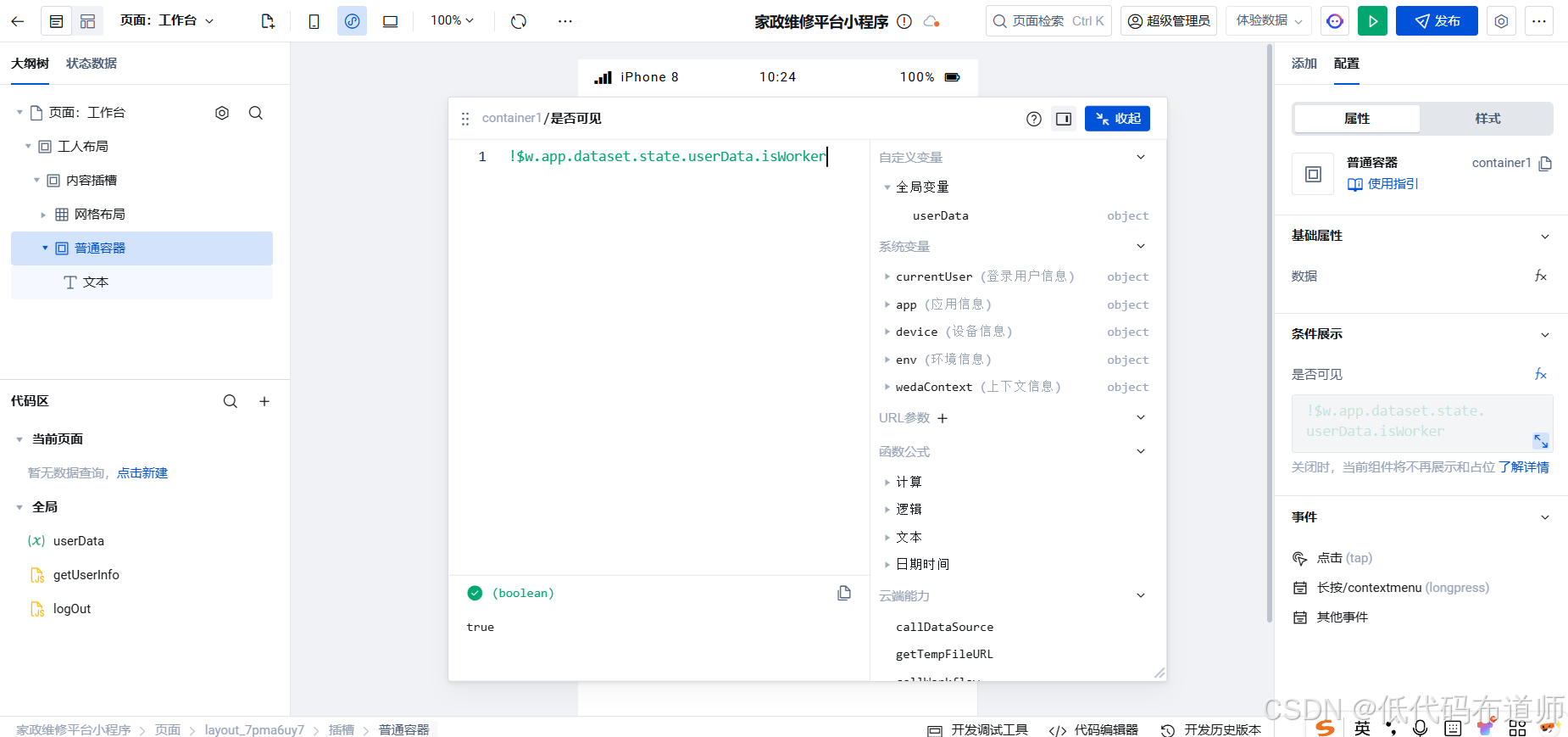
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

Frozen-Flask :将 Flask 应用“冻结”为静态文件
Frozen-Flask 是一个用于将 Flask 应用“冻结”为静态文件的 Python 扩展。它的核心用途是:将一个 Flask Web 应用生成成纯静态 HTML 文件,从而可以部署到静态网站托管服务上,如 GitHub Pages、Netlify 或任何支持静态文件的网站服务器。 &am…...

网络编程(UDP编程)
思维导图 UDP基础编程(单播) 1.流程图 服务器:短信的接收方 创建套接字 (socket)-----------------------------------------》有手机指定网络信息-----------------------------------------------》有号码绑定套接字 (bind)--------------…...
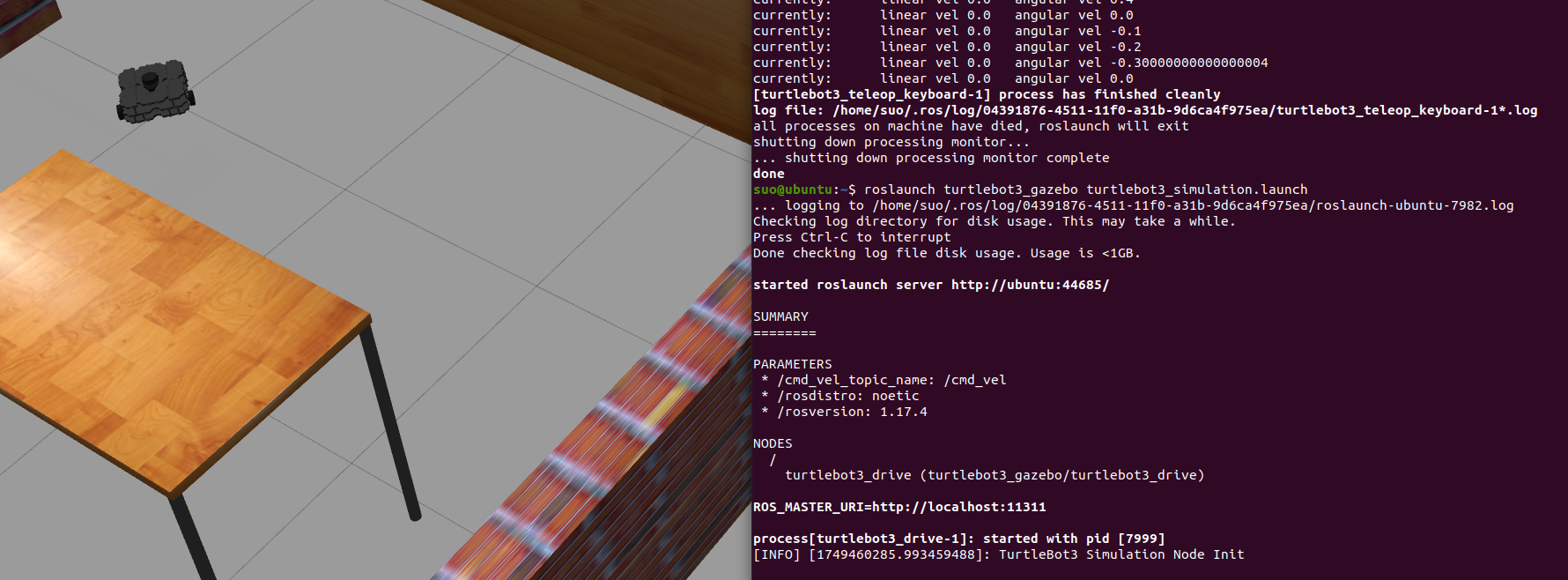
基于TurtleBot3在Gazebo地图实现机器人远程控制
1. TurtleBot3环境配置 # 下载TurtleBot3核心包 mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src git clone -b noetic-devel https://github.com/ROBOTIS-GIT/turtlebot3.git git clone -b noetic https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone -b noetic-dev…...

【SSH疑难排查】轻松解决新版OpenSSH连接旧服务器的“no matching...“系列算法协商失败问题
【SSH疑难排查】轻松解决新版OpenSSH连接旧服务器的"no matching..."系列算法协商失败问题 摘要: 近期,在使用较新版本的OpenSSH客户端连接老旧SSH服务器时,会遇到 "no matching key exchange method found", "n…...
RabbitMQ入门4.1.0版本(基于java、SpringBoot操作)
RabbitMQ 一、RabbitMQ概述 RabbitMQ RabbitMQ最初由LShift和CohesiveFT于2007年开发,后来由Pivotal Software Inc.(现为VMware子公司)接管。RabbitMQ 是一个开源的消息代理和队列服务器,用 Erlang 语言编写。广泛应用于各种分布…...

苹果AI眼镜:从“工具”到“社交姿态”的范式革命——重新定义AI交互入口的未来机会
在2025年的AI硬件浪潮中,苹果AI眼镜(Apple Glasses)正在引发一场关于“人机交互形态”的深度思考。它并非简单地替代AirPods或Apple Watch,而是开辟了一个全新的、日常可接受的AI入口。其核心价值不在于功能的堆叠,而在于如何通过形态设计打破社交壁垒,成为用户“全天佩戴…...