C++:使用红黑树封装map和set
目录
一. 如何使用一颗红黑树同时实现map和set
二. 红黑树的节点插入操作
三. 红黑树迭代器的实现
3.1 begin()和end()
3.2 operator++和operator--
3.3 红黑树迭代器实现完整版代码
四. map和set的封装
附录:用红黑树封装map和set完整版代码
1. RBTree.h文件
2. map.h文件
3. set.h文件
一. 如何使用一颗红黑树同时实现map和set
我们知道,map和set的底层都是通过红黑树来实现的,它们的不同在于:map存储的是一键值对,键值对的第一个数据用于搜索树的比较,第二个数据用于与之配对,而set则只有一个数据。需要采用模板(泛型编程)的方法来定义红黑树节点,并在map和set中给定红黑树类模板不同的模板参数类型,
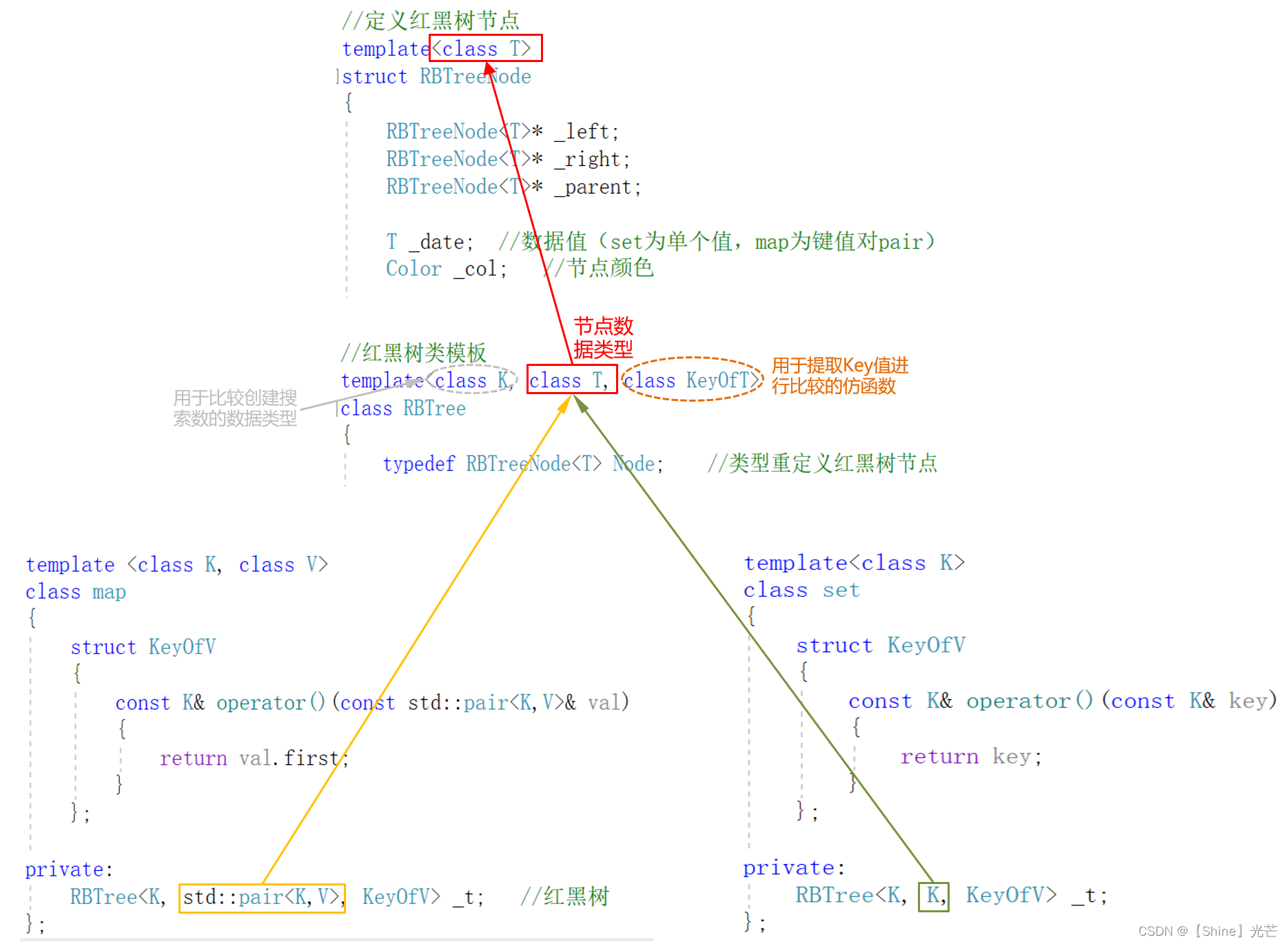
观察图1.1,我们可以总结出RBTreeNode、RBTree、map和set类模板之间的如下规则:
- 红黑树节点只有一个模板参数,set有一个模板参数,其本身就是节点的数据类型,map有两个模板参数,分别为创建键值对的first和second数据类型。
- 在map中,RBTreeNode中的模板参数类型为pair键值对,由于map中要取出键值对的first比较创建搜索树,而直接用>或<对pair比较不符合要求,因此定义仿函数KeyOfV来获取用于比较的数据。
二. 红黑树的节点插入操作
用于对map和set封装的红黑树的查找操作与普通红黑树一致,唯一的不同在于需要创建KeyOfV类的对象,并使用仿函数进行比较。如果希望与库中的insert更加贴合,则应返还键值对pair<iterator, bool>类型数据。
具体的红黑树的插入实现流程,可参考博文:C++数据结构:手撕红黑树_【Shine】光芒的博客-CSDN博客
代码2.1:(红黑树节点插入)
std::pair<iterator, bool> insert(const T& date){//插入第一个节点if (_root == nullptr){_root = new Node(date);_root->_col = BLACK; //根节点为黑色return std::make_pair(_root, true);}KeyOfT kov; //用于筛选比较数据的类对象//寻找节点插入的位置Node* parent = nullptr; Node* cur = _root;while (cur){//如果cur节点的key值大于插入键值对的key,向左子树查找if (kov(cur->_date) > kov(date)){parent = cur;cur = cur->_left;}else if(kov(cur->_date) < kov(date)) //如果cur节点的key值小于插入键值对的key,向左子树查找{parent = cur;cur = cur->_right;}else //相等表明节点已存在,插入失败{return std::make_pair(cur, false);}}//判断新节点是parent的左节点还是右节点,链接//默认新插入的节点为红色cur = new Node(date);Node* newNode = cur;cur->_col = RED;cur->_parent = parent;if (kov(parent->_date) > kov(date)){parent->_left = cur;}else{parent->_right = cur;}//如果parent节点不为空且为红色,那么红黑树的结构在插入节点后被破坏,需要调整while (parent && parent->_col == RED){Node* grandParent = parent->_parent; //祖父节点assert(grandParent);assert(grandParent->_col == BLACK); //断言检查,如果祖父节点为空或为黑色,那么红黑树结构在节点插入之前就存在问题if (parent == grandParent->_left) //插入在祖父节点的左子树{Node* uncle = grandParent->_right;//情况一:cur为红,parent为红,grandFather为黑,uncle为红if (uncle && uncle->_col == RED){//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整parent->_col = BLACK;uncle->_col = BLACK;grandParent->_col = RED;cur = grandParent;parent = cur->_parent;} else //情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑{if (parent->_left == cur){//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)// g// p u//cRotateR(grandParent);parent->_col = BLACK;grandParent->_col = RED;}else{//情况三 -- 进行左右双旋 + 变色(cur节点变为黑,grandFater节点变为红)// g// p u// u RotateLR(grandParent);cur->_col = BLACK;grandParent->_col = RED;}break;}}else //parent == grandParent->_right{Node* uncle = grandParent->_left; //叔叔节点//情况一:cur为红,parent为红,grandFather为黑,uncle为红if (uncle && uncle->_col == RED){//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整parent->_col = BLACK;uncle->_col = BLACK;grandParent->_col = RED;cur = grandParent;parent = cur->_parent;}else{//情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑if (parent->_right == cur){//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)// g// u p// cRotateL(grandParent);parent->_col = BLACK;grandParent->_col = RED;}else{//情况三 -- 进行右左双旋 + 变色(cur节点变为黑,grandFater节点变为红)// g// u p// cRotateRL(grandParent);cur->_col = BLACK;grandParent->_col = RED;}break;}}}_root->_col = BLACK; //根节点为黑色return std::make_pair(newNode, true);}三. 红黑树迭代器的实现
我们要额外封装一个类struct __RBTree_iterator_来实现红黑树迭代器,这个类有三个模板参数T、Ref、Ptr,这样做的目的是定义一份迭代器类模板就可以实现普通迭代器和const迭代器。
- typedef __RBTree_iterator_<T, T&, T*> iterator; //红黑树迭代器
3.1 begin()和end()
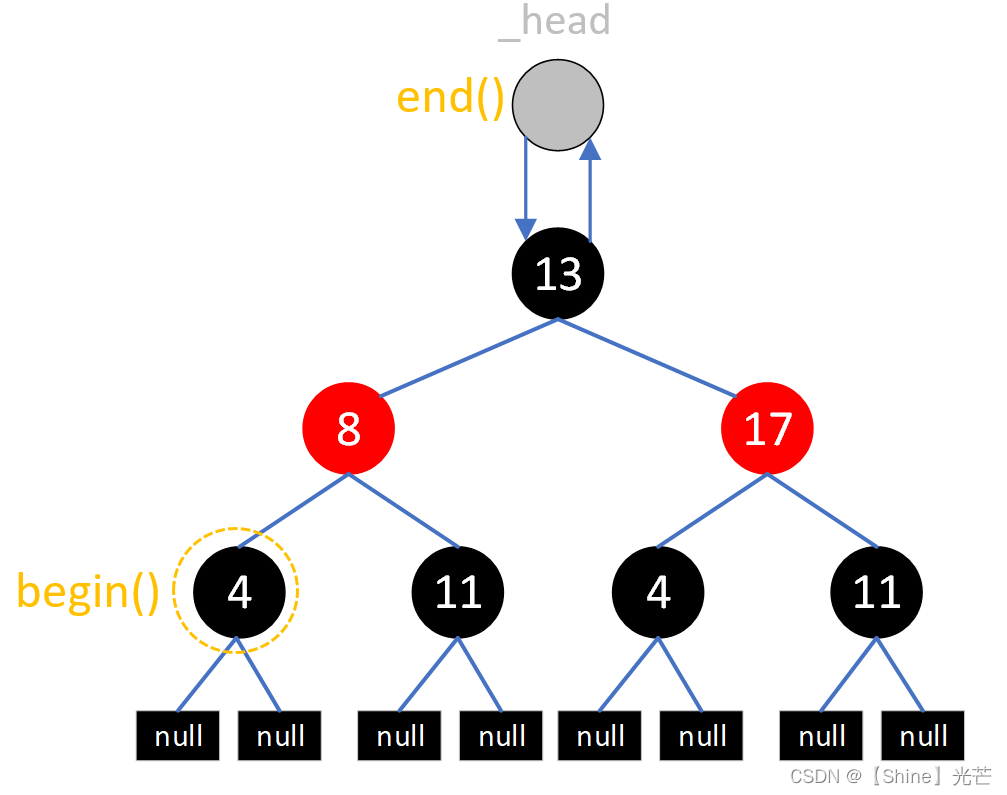
STL标准规定迭代器区间begin()和end()为左闭右开区间,而对红黑树遍历获取的数据为升序序列,因此,begin()应该为左下角位置处的节点,end()应该为哨兵卫的头结点_head。这里从便于理解和实现的角度出发,将_head设为nullptr,即:end()返回空指针。
代码3.1:(begin和end)
//获取begin()位置 -- 最左侧节点iterator begin(){Node* left = _root;while (left && left->_left){left = left->_left;}return iterator(left);}iterator end(){return iterator(nullptr);}3.2 operator++和operator--
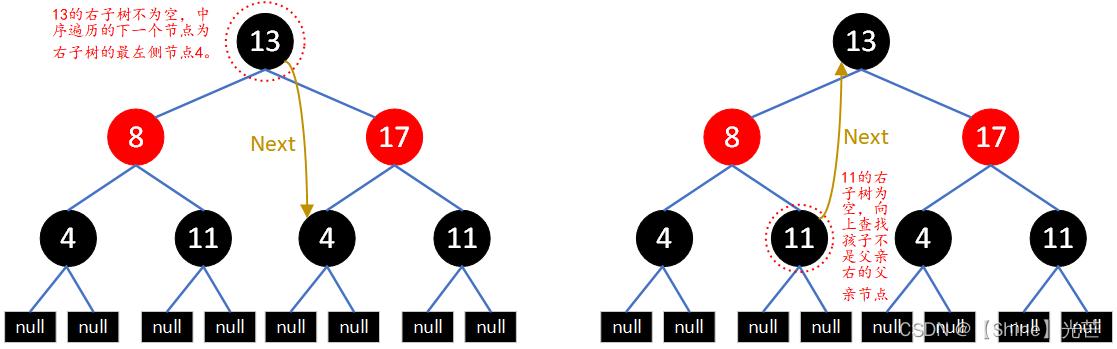
operator++就是查找中序遍历的下一个节点,可分为两种情况讨论:
- 如果节点的右子树不为空,则为右子树最左侧的节点。
- 如果节点的右子树为空,则向上查找孩子不是父亲的右子节点的那个节点。
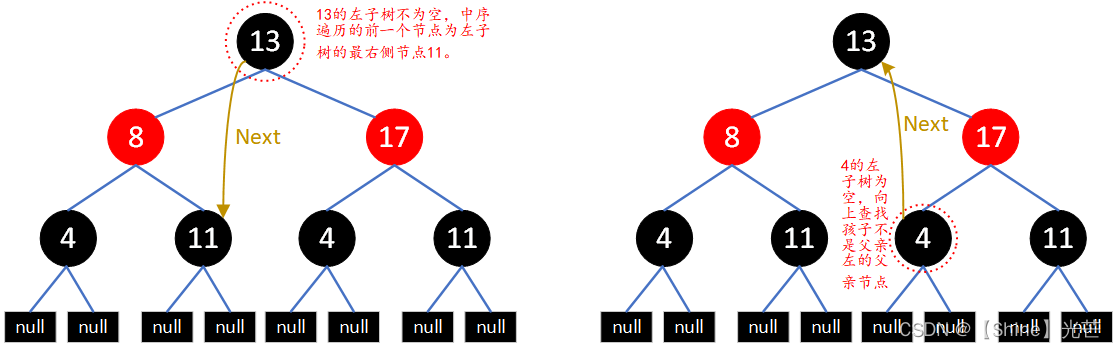
operator--与operator++正好相反,为找中序遍历的前一个节点,亦可分两种情况讨论:
- 如果节点的左子树不为空,则为左子树最右侧的节点。
- 如果节点的左子树为空,则向上查找孩子不是父亲的左子节点的那个节点。
代码3.2:(operator++和operator--)
typedef RBTreeNode<T> Node; //红黑树节点typedef __RBTree_iterator_<T, Ref, Ptr> Self; //++运算符重载函数Self& operator++(){if (_node->_right != nullptr){//找右子树的最左侧节点Node* left = _node->_right;while (left->_left){left = left->_left;}_node = left;}else{//找孩子节点为左孩子节点的位置,或者父亲节点为空Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_right == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}//--运算符重载函数Self& operator--(){if (_node->_left != nullptr){Node* right = _node->_left;while (right->_right){right = right->_right;}_node = right;}else{Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_left == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}3.3 红黑树迭代器实现完整版代码
//红黑树迭代器模板
template<class T, class Ref, class Ptr>
struct __RBTree_iterator_
{typedef RBTreeNode<T> Node; //红黑树节点typedef __RBTree_iterator_<T, Ref, Ptr> Self;Node* _node;//构造函数__RBTree_iterator_(Node* node): _node(node){ }//解引用函数Ref operator*(){return _node->_date;}//成员访问操作符->重载Ptr operator->(){return &_node->_date;}bool operator==(const Self& it) const{return _node == it._node;}bool operator!=(const Self& it) const{return _node != it._node;}//++运算符重载函数Self& operator++(){if (_node->_right != nullptr){//找右子树的最左侧节点Node* left = _node->_right;while (left->_left){left = left->_left;}_node = left;}else{//找孩子节点为左孩子节点的位置,或者父亲节点为空Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_right == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}//--运算符重载函数Self& operator--(){if (_node->_left != nullptr){Node* right = _node->_left;while (right->_right){right = right->_right;}_node = right;}else{Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_left == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}
};四. map和set的封装
map和set底层都是通过红黑树来实现的,只需在map和set中定义一颗红黑树的自定义类型变量,然后调用红黑树的接口函数即可。
这里需要特别注意的是map中的operator[]函数,其实现为先调用insert函数,insert函数返回一个键值对,first为插入的节点或Key与插入节点相等位置的迭代器,second为bool类型变量,用来表示是否有新节点成功插入。函数只需返回insert返回的键值对的second的引用即可。
注意用于提取Key的仿函数要在map和set中分别定义。
代码4.1:(map的封装)
namespace zhang
{template <class K, class V>class map{struct KeyOfV{const K& operator()(const std::pair<K,V>& val){return val.first;}};public:typedef typename RBTree<K, std::pair<K, V>, KeyOfV>::iterator iterator;std::pair<iterator, bool> insert(const std::pair<K, V>& kv){return _t.insert(kv);}iterator begin(){return _t.begin();}iterator end(){return _t.end();}V& operator[](const K& key){std::pair<iterator, bool> ret = insert(std::make_pair(key, V()));return ret.first->second;}private:RBTree<K, std::pair<K,V>, KeyOfV> _t; //红黑树};
}代码4.2:(set的模拟实现)
namespace zhang
{template <class K>class set{struct KeyOfV{const K& operator()(const K& val){return val;}};public:typedef typename RBTree<K, K, KeyOfV>::iterator iterator;std::pair<iterator, bool> insert(const K& key){return _t.insert(key);}iterator begin(){return _t.begin();}iterator end(){return _t.end();}K& operator[](const K& key){std::pair<iterator, bool> ret = insert(key);return *ret.first;}private:RBTree<K, K, KeyOfV> _t; //红黑树};
}
附录:用红黑树封装map和set完整版代码
1. RBTree.h文件
#include<iostream>
#include<assert.h>//枚举常量 -- 红色、黑色
enum Color
{RED,BLACK
};//定义红黑树节点
template<class T>
struct RBTreeNode
{RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;T _date; //数据值(set为单个值,map为键值对pair)Color _col; //节点颜色RBTreeNode(const T& date) //节点构造函数: _left(nullptr), _right(nullptr), _parent(nullptr), _date(date), _col(RED){ }
};//红黑树迭代器模板
template<class T, class Ref, class Ptr>
struct __RBTree_iterator_
{typedef RBTreeNode<T> Node; //红黑树节点typedef __RBTree_iterator_<T, Ref, Ptr> Self;Node* _node;//构造函数__RBTree_iterator_(Node* node): _node(node){ }//解引用函数Ref operator*(){return _node->_date;}//成员访问操作符->重载Ptr operator->(){return &_node->_date;}bool operator==(const Self& it) const{return _node == it._node;}bool operator!=(const Self& it) const{return _node != it._node;}//++运算符重载函数Self& operator++(){if (_node->_right != nullptr){//找右子树的最左侧节点Node* left = _node->_right;while (left->_left){left = left->_left;}_node = left;}else{//找孩子节点为左孩子节点的位置,或者父亲节点为空Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_right == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}//--运算符重载函数Self& operator--(){if (_node->_left != nullptr){Node* right = _node->_left;while (right->_right){right = right->_right;}_node = right;}else{Node* parent = _node->_parent;Node* cur = _node;while (parent && parent->_left == cur){cur = cur->_parent;parent = parent->_parent;}_node = parent;}return *this;}
};//红黑树类模板
template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node; //类型重定义红黑树节点public:typedef __RBTree_iterator_<T, T&, T*> iterator; //迭代器std::pair<iterator, bool> insert(const T& date){//插入第一个节点if (_root == nullptr){_root = new Node(date);_root->_col = BLACK; //根节点为黑色return std::make_pair(_root, true);}KeyOfT kov; //用于筛选比较数据的类对象//寻找节点插入的位置Node* parent = nullptr; Node* cur = _root;while (cur){//如果cur节点的key值大于插入键值对的key,向左子树查找if (kov(cur->_date) > kov(date)){parent = cur;cur = cur->_left;}else if(kov(cur->_date) < kov(date)) //如果cur节点的key值小于插入键值对的key,向左子树查找{parent = cur;cur = cur->_right;}else //相等表明节点已存在,插入失败{return std::make_pair(cur, false);}}//判断新节点是parent的左节点还是右节点,链接//默认新插入的节点为红色cur = new Node(date);Node* newNode = cur;cur->_col = RED;cur->_parent = parent;if (kov(parent->_date) > kov(date)){parent->_left = cur;}else{parent->_right = cur;}//如果parent节点不为空且为红色,那么红黑树的结构在插入节点后被破坏,需要调整while (parent && parent->_col == RED){Node* grandParent = parent->_parent; //祖父节点assert(grandParent);assert(grandParent->_col == BLACK); //断言检查,如果祖父节点为空或为黑色,那么红黑树结构在节点插入之前就存在问题if (parent == grandParent->_left) //插入在祖父节点的左子树{Node* uncle = grandParent->_right;//情况一:cur为红,parent为红,grandFather为黑,uncle为红if (uncle && uncle->_col == RED){//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整parent->_col = BLACK;uncle->_col = BLACK;grandParent->_col = RED;cur = grandParent;parent = cur->_parent;} else //情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑{if (parent->_left == cur){//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)// g// p u//cRotateR(grandParent);parent->_col = BLACK;grandParent->_col = RED;}else{//情况三 -- 进行左右双旋 + 变色(cur节点变为黑,grandFater节点变为红)// g// p u// u RotateLR(grandParent);cur->_col = BLACK;grandParent->_col = RED;}break;}}else //parent == grandParent->_right{Node* uncle = grandParent->_left; //叔叔节点//情况一:cur为红,parent为红,grandFather为黑,uncle为红if (uncle && uncle->_col == RED){//将parent节点和uncle节点变为黑,grandFather节点变为红,然后继续向上调整parent->_col = BLACK;uncle->_col = BLACK;grandParent->_col = RED;cur = grandParent;parent = cur->_parent;}else{//情况二、三:cur为红,parent为红,grandFather为黑,uncle不存在或为黑if (parent->_right == cur){//情况二 -- 进行右单旋 + 变色(parent变黑,grandFather变红)// g// u p// cRotateL(grandParent);parent->_col = BLACK;grandParent->_col = RED;}else{//情况三 -- 进行右左双旋 + 变色(cur节点变为黑,grandFater节点变为红)// g// u p// cRotateRL(grandParent);cur->_col = BLACK;grandParent->_col = RED;}break;}}}_root->_col = BLACK; //根节点为黑色return std::make_pair(newNode, true);}//中序遍历函数void InOrder(){_InOrder(_root);std::cout << std::endl;}//红黑树检验函数bool IsRBTree(){//空树是合法的红黑树if (_root == nullptr){return true;}//检查根节点颜色if (_root->_col == RED){std::cout << "根节点颜色不是黑色" << std::endl;}int baseBlackNum = 0; //基准黑色节点个数//以最左侧路径为基准,计算黑色节点个数,每条路径黑色节点数目都应该相同Node* cur = _root;while (cur){if (cur->_col == BLACK){++baseBlackNum;}cur = cur->_left;}bool blackNumTrue = PrevCheck(_root, 0, baseBlackNum); //检查每条路径黑色节点数目是否相同bool colorTrue = CheckColor(_root); //检查是否存在连续红色节点return blackNumTrue && colorTrue;}//获取begin()位置 -- 最左侧节点iterator begin(){Node* left = _root;while (left && left->_left){left = left->_left;}return iterator(left);}iterator end(){return iterator(nullptr);}private:bool CheckColor(Node* root){if (root == nullptr){return true;}//如果本节点为红色且父亲节点也为红色,证明存在连续红色节点,结构错误if (root->_col == RED && root->_parent && root->_parent->_col == RED){std::cout << "存在连续的红色节点" << std::endl;return false;}return CheckColor(root->_left) && CheckColor(root->_right);}bool PrevCheck(Node* root, int blackNum, int baseBlackNum){if (root == nullptr){if (blackNum != baseBlackNum){std::cout << "每条路径上黑色节点的数目不同" << std::endl;return false;}else{return true;}}if (root->_col == BLACK){++blackNum;}return PrevCheck(root->_left, blackNum, baseBlackNum)&& PrevCheck(root->_right, blackNum, baseBlackNum);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);std::cout << root->_kv.first << " ";_InOrder(root->_right);}void RotateR(Node* parent) //右单旋函数{Node* pNode = parent->_parent; Node* pL = parent->_left; //左子节点Node* pLR = pL->_right; //左子节点的右子节点//将pLR节点托管给parent节点的左子节点parent->_left = pLR;if (pLR != nullptr){pLR->_parent = parent;}//将父亲节点托管给pL节点的右子节点pL->_right = parent; parent->_parent = pL;//此时这颗进行旋转的子树的根节点变为了pL,pL要与pNode节点连接if (parent == _root){_root = pL;pL->_parent = nullptr;}else{pL->_parent = pNode;if (pNode->_left == parent){pNode->_left = pL;}else{pNode->_right = pL;}}}void RotateL(Node* parent) //左单旋函数{Node* pNode = parent->_parent;Node* pR = parent->_right; //右子节点Node* pRL = pR->_left; //右子节点的左子节点//将pLR节点托管给parent节点的右子节点parent->_right = pRL;if (pRL != nullptr){pRL->_parent = parent;}//将parent节点托管给pR的左子节点pR->_left = parent;parent->_parent = pR;if (_root == parent){_root = pR;_root->_parent = nullptr;}else{pR->_parent = pNode;if (pNode->_left == parent){pNode->_left = pR;}else{pNode->_right = pR;}}}void RotateLR(Node* parent) //左右双旋函数{RotateL(parent->_left);RotateR(parent);}void RotateRL(Node* parent) //右左双旋函数{RotateR(parent->_right);RotateL(parent);}private:Node* _root = nullptr;
};2. map.h文件
#include "RBTree.h"namespace zhang
{template <class K, class V>class map{struct KeyOfV{const K& operator()(const std::pair<K,V>& val){return val.first;}};public:typedef typename RBTree<K, std::pair<K, V>, KeyOfV>::iterator iterator;std::pair<iterator, bool> insert(const std::pair<K, V>& kv){return _t.insert(kv);}iterator begin(){return _t.begin();}iterator end(){return _t.end();}V& operator[](const K& key){std::pair<iterator, bool> ret = insert(std::make_pair(key, V()));return ret.first->second;}private:RBTree<K, std::pair<K,V>, KeyOfV> _t; //红黑树};
}3. set.h文件
namespace zhang
{template <class K>class set{struct KeyOfV{const K& operator()(const K& val){return val;}};public:typedef typename RBTree<K, K, KeyOfV>::iterator iterator;std::pair<iterator, bool> insert(const K& key){return _t.insert(key);}iterator begin(){return _t.begin();}iterator end(){return _t.end();}K& operator[](const K& key){std::pair<iterator, bool> ret = insert(key);return *ret.first;}private:RBTree<K, K, KeyOfV> _t; //红黑树};
}
相关文章:
C++:使用红黑树封装map和set
目录 一. 如何使用一颗红黑树同时实现map和set 二. 红黑树的节点插入操作 三. 红黑树迭代器的实现 3.1 begin()和end() 3.2 operator和operator-- 3.3 红黑树迭代器实现完整版代码 四. map和set的封装 附录:用红黑树封装map和set完整版代码 1. RBTree.h文件…...

Go 命令
目录 文章目录 go buildgo cleango fmtgo getgo installgo testgo toolgo generategodoc其它命令 go build 这个命令主要用于编译代码。在包的编译过程中,若有必要,会同时编译与之相关联的包。 如果是普通包,就像我们在1.2节中编写的mymath包…...

LEO、HW、LSO、LW 分别代表什么?
LEO :是 LogEndOffset 的简称,代表当前日志文件中下一条。HW:水位或水印一词,也可称为高水位 (high watermark) ,通常被用在流式处理领域 (flink、spark) ,以表征元素…...
(二分答案))
问题 B: 跳石头(C++)(二分答案)
目录 1.题目描述 2.AC 1.题目描述 问题 B: 跳石头 时间限制: 1.000 Sec 内存限制: 128 MB提交 状态 题目描述 一年一度的“跳石头”比赛又要开始了! 这项比赛将在一条笔直的河道中进行,河道中分布着一些巨大岩石。组委会已经选择好了两块岩石作为比赛起点和终点。在起点…...

bugku——变量1
拿到题目后是一串PHP代码,给到提示是flag在变量中,接下来进行代码审计 error_reporting(0):关闭错误报告 include “flag1.php”:包含flag1.php文件 highlight_file(_file_):页面进行语法高亮显示 isset($_GET[‘args’])…...

网络数据包丢失监控
什么是网络数据包 数据包或网络数据包是通过网络传输的小数据单元。顾名思义,这些是小的、离散的数据单元。单独来看,这些单位不一定有多大意义。它们只是正在传输的整体消息的一部分,这些消息已被组装成多个层。但是,当组合在一…...

Linux服务器安装部署MongoDB数据库 - 无公网IP远程连接
目录 前言 1. 配置Mongodb源 2. 安装MongoDB 3. 局域网连接测试 4. 安装cpolar内网穿透 5. 配置公网访问地址 6. 公网远程连接 7. 固定连接公网地址 8. 使用固定地址连接 转载自Cpolar Lisa文章:Linux服务器安装部署MongoDB数据库 - 无公网IP远程连接「内网…...

CSS面试题:30道含答案和代码示例的练习题
什么是 CSS?它的作用是什么? CSS(层叠样式表)是一种用于描述网页样式的语言。它的作用是控制网页的布局、字体、颜色、背景等方面的样式。如何在 HTML 页面中引入 CSS? 可以使用 标签将 CSS 文件引入到 HTML 页面中。例…...
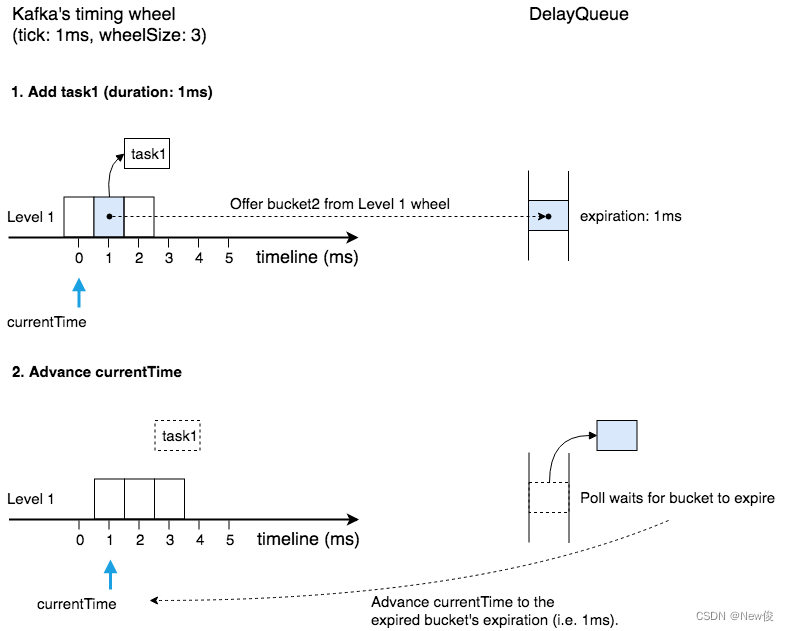
时间轮的golang实践浅析
引言 下列代码模仿一段RPC请求的执行过程,执行后会有哪些问题: RPC代码示例答案:因为超时控制后未阻断后续请求,导致并发读写产生Panic思考:客户端发起 HTTP 请求后,如果在指定时间内没有收到服务器的响应…...

Linux命令_stress 快速模拟CPU、内存、磁盘消耗
ping的安装命令:apt-get install -y inetutils-ping 会遇到Unable to locate package inetutils-ping问题 正确的操作是: ** 这时候需要敲:apt-get update,这个命令的作用是:同步 /etc/apt/sources.list 和 /etc/apt/…...
-生存曲线(LM曲线))
可视化绘图技巧100篇分析篇(二)-生存曲线(LM曲线)
目录 前言 几个高频面试题目 roc曲线和生存曲线区别 生存曲线模型 生存曲线组件讲解...

UP主发车啦!撩人仙侠文系列,谁来管管这个反派啊!
本人书龄4年,平时很爱看小说,阅遍无数经典修仙文,熬夜党的最爱啊!!!!我心中的仙侠top,都是我的心头爱。 一般我都会跟朋友说这六本五星级仙侠好文,如果她们不看…...
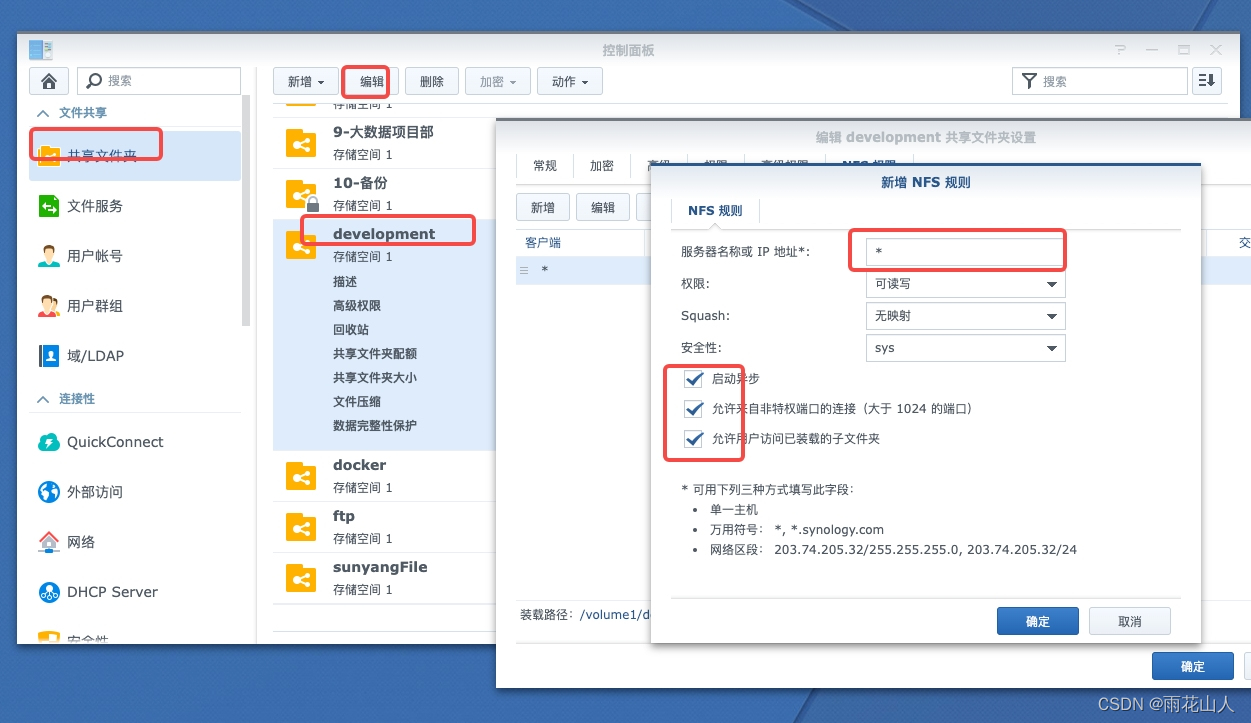
K8S使用持久化卷存储到NFS(NAS盘)
参考文章:K8S-v1.20中使用PVC持久卷 - 知乎 目录 1、概念: 1.1 基础概念 1.2 PV的配置 1.2.1 静态PV配置 1.2.2 动态PV配置 1.2.3 PVC与PV的绑定 1.2.4 PVC及PV的使用 2 部署PV及PVC 2.1 所有K8S机器都需要安装NFS程序 2.2 仅针对需要暴露文件…...

一图看懂 multidict 模块:类似于字典的键值对集合,键可以多次出现,资料整理+笔记(大全)
本文由 大侠(AhcaoZhu)原创,转载请声明。 链接: https://blog.csdn.net/Ahcao2008 一图看懂 multidict 模块:类似于字典的键值对集合,键可以多次出现,资料整理笔记(大全) 🧊摘要🧊模…...

django CBV 与 DRF APIView源码分析
django CBV源码分析 在django框架中,视图层中的逻辑即可以使用函数处理也可以使用类进行处理,如果在视图层中使用函数处理请求,就是FBV(function base views),如果在视图层中使用类处理请求,就是CBV(class base views…...
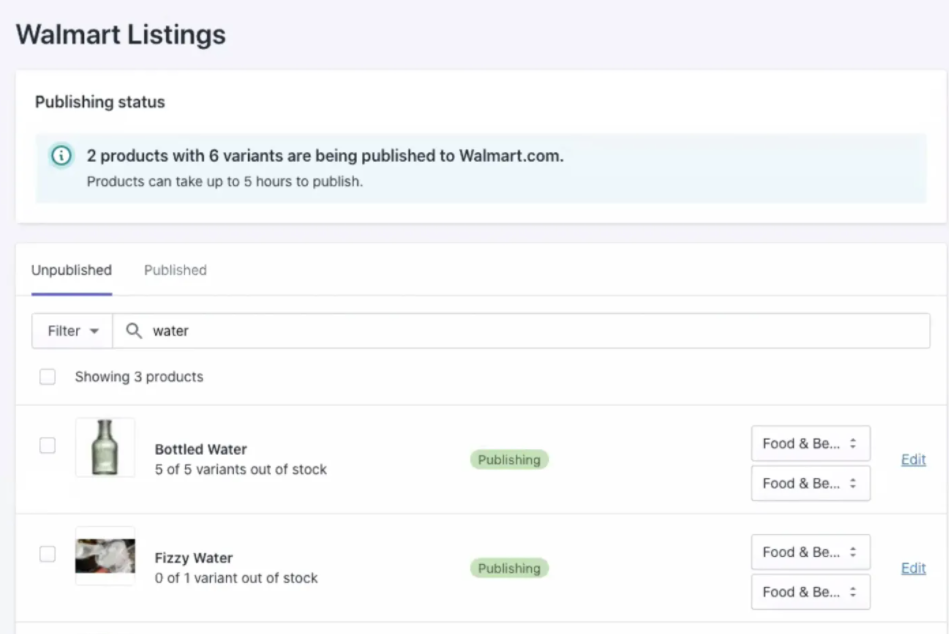
沃尔玛入驻教程:中国卖家如何免费、快速入驻沃尔玛walmart.com?
作为一家全球知名的零售巨头,沃尔玛(Walmart)的在线商城walmart.com拥有庞大的消费者基础和巨大的商机。对于中国的卖家来说,入驻沃尔玛的平台是一个很好的机会,但是有没有什么方法可以免费、快速入驻呢?有…...
《花雕学AI》Poe 上的四种 AI 机器人,你该怎么选?ChatGPT、Sage、Claude 和 Dragonfly对比
虽然 ChatGPT 是一项革命性的技术,但它作为一个消费产品却有点失败。你可能会花很长时间等待 OpenAI 的聊天机器人加载,或者根本无法使用它,因为它太大了。就算你能用上它,它也很缓慢,而且它的界面也很丑陋。它甚至没有…...

localStorage
目录 localStorage与sessionStorage localStorage的Set与Get localStorage传递参数 localStorage与sessionStorage 现代浏览器提供了一种被称为"Web Storage APIs"(Web 存储接口)的机制,允许在同一浏览器的不同标签页之间共享数…...

二十五、SQL 数据分析实战(9个中等难度的SQL题目)
文章目录 题目1: App 使用频率分析题目2: App 下载情况统计题目3: 寻找活跃学习者题目4: 商品分类整理题目5: 商品销售分析题目6: 网约车司机收益统计题目7: 网站登录时间间隔统计题目8: 不同区域商品收入统计题目9: 信贷逾期情况统计 题目1: App 使用频率分析 现有一张用户使…...

JavaSE_02基本语法-编程单词词汇
boolean [bʊlɪən] 变量的基本数据类型之一:布尔型const [kɒnst] n. 常量,常数constant [kɒnst(ə)nt] n. [数] 常数;恒量continue [kən’tɪnjuː] vi. 继续,连续;default [dɪ’fɔːlt; diːfɔːlt] 默认的,缺…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...

测试微信模版消息推送
进入“开发接口管理”--“公众平台测试账号”,无需申请公众账号、可在测试账号中体验并测试微信公众平台所有高级接口。 获取access_token: 自定义模版消息: 关注测试号:扫二维码关注测试号。 发送模版消息: import requests da…...

19c补丁后oracle属主变化,导致不能识别磁盘组
补丁后服务器重启,数据库再次无法启动 ORA01017: invalid username/password; logon denied Oracle 19c 在打上 19.23 或以上补丁版本后,存在与用户组权限相关的问题。具体表现为,Oracle 实例的运行用户(oracle)和集…...

多模态2025:技术路线“神仙打架”,视频生成冲上云霄
文|魏琳华 编|王一粟 一场大会,聚集了中国多模态大模型的“半壁江山”。 智源大会2025为期两天的论坛中,汇集了学界、创业公司和大厂等三方的热门选手,关于多模态的集中讨论达到了前所未有的热度。其中,…...

DeepSeek 赋能智慧能源:微电网优化调度的智能革新路径
目录 一、智慧能源微电网优化调度概述1.1 智慧能源微电网概念1.2 优化调度的重要性1.3 目前面临的挑战 二、DeepSeek 技术探秘2.1 DeepSeek 技术原理2.2 DeepSeek 独特优势2.3 DeepSeek 在 AI 领域地位 三、DeepSeek 在微电网优化调度中的应用剖析3.1 数据处理与分析3.2 预测与…...
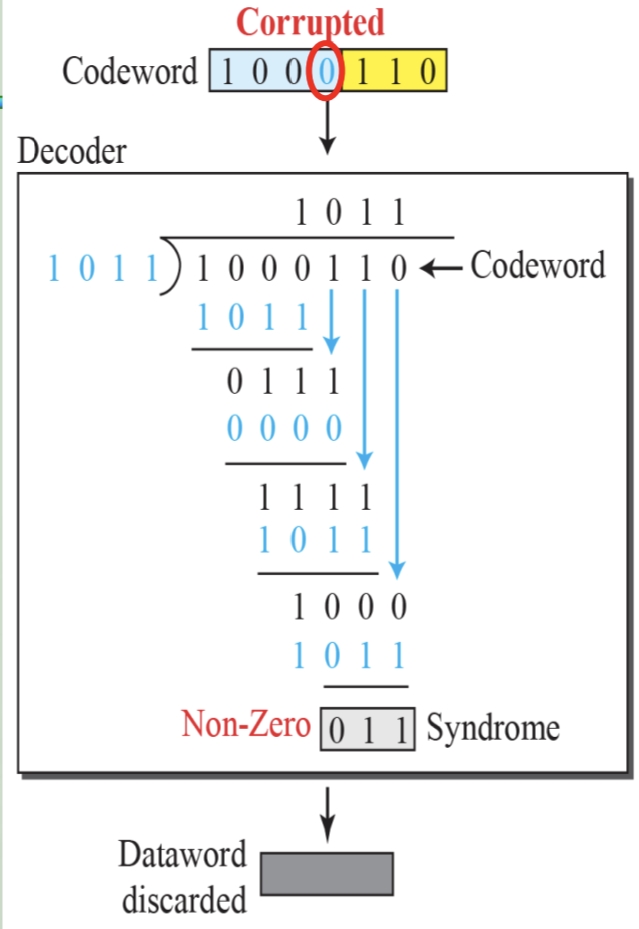
循环冗余码校验CRC码 算法步骤+详细实例计算
通信过程:(白话解释) 我们将原始待发送的消息称为 M M M,依据发送接收消息双方约定的生成多项式 G ( x ) G(x) G(x)(意思就是 G ( x ) G(x) G(x) 是已知的)࿰…...
el-switch文字内置
el-switch文字内置 效果 vue <div style"color:#ffffff;font-size:14px;float:left;margin-bottom:5px;margin-right:5px;">自动加载</div> <el-switch v-model"value" active-color"#3E99FB" inactive-color"#DCDFE6"…...
C# 类和继承(抽象类)
抽象类 抽象类是指设计为被继承的类。抽象类只能被用作其他类的基类。 不能创建抽象类的实例。抽象类使用abstract修饰符声明。 抽象类可以包含抽象成员或普通的非抽象成员。抽象类的成员可以是抽象成员和普通带 实现的成员的任意组合。抽象类自己可以派生自另一个抽象类。例…...
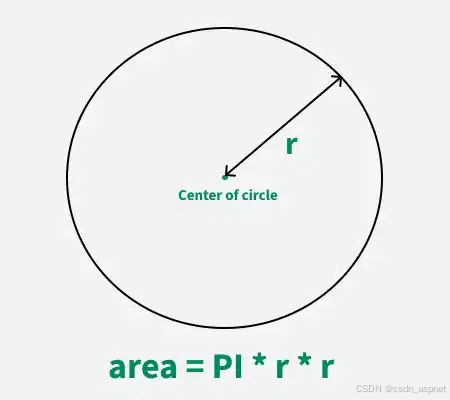
C++ 求圆面积的程序(Program to find area of a circle)
给定半径r,求圆的面积。圆的面积应精确到小数点后5位。 例子: 输入:r 5 输出:78.53982 解释:由于面积 PI * r * r 3.14159265358979323846 * 5 * 5 78.53982,因为我们只保留小数点后 5 位数字。 输…...
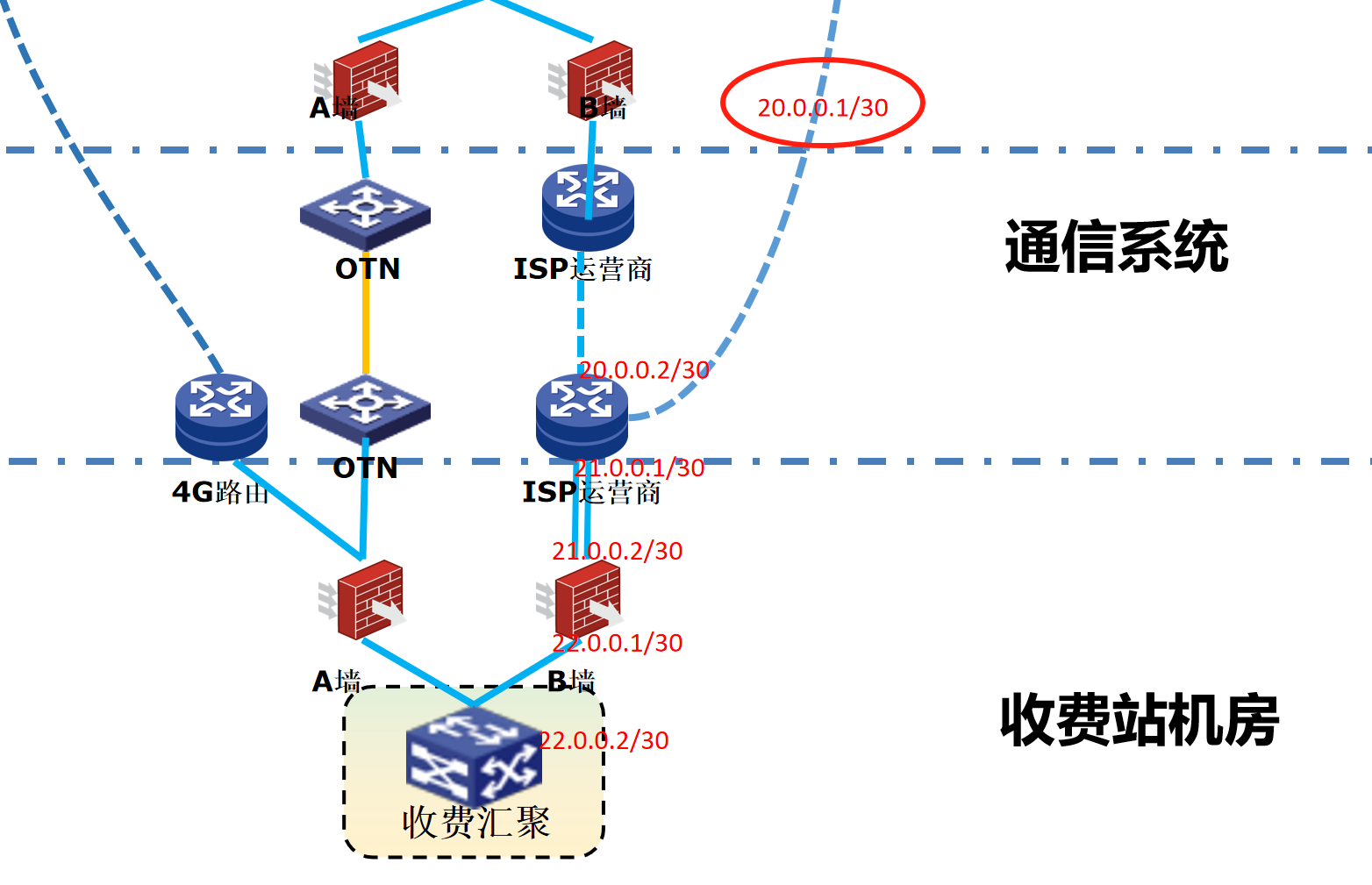
浪潮交换机配置track检测实现高速公路收费网络主备切换NQA
浪潮交换机track配置 项目背景高速网络拓扑网络情况分析通信线路收费网络路由 收费汇聚交换机相应配置收费汇聚track配置 项目背景 在实施省内一条高速公路时遇到的需求,本次涉及的主要是收费汇聚交换机的配置,浪潮网络设备在高速项目很少,通…...