OpenCV中的图像处理3.9(六)轮廓线特征与属性
目录
- 3.9 OpenCV中的轮廓线
- 3.9.1 轮廓线:入门
- 目标
- 什么是轮廓线?
- 如何绘制轮廓线?
- 轮廓线逼近法
- 3.9.2 轮廓线的特征
- 1. 矩
- 2. 轮廓线面积
- 3. 轮廓线周长
- 4. 轮廓逼近
- 5. 凸面体
- 6. 检查凸性
- 7. 边界矩形
- 8. 最小包围圈
- 9. 拟合椭圆
- 10. 拟合直线
- 3.9.3 轮廓属性
- 1.纵横比
- 2.外延
- 3.实体性
- 4.等效直径
- 5.方向
- 6.掩膜和像素点
- 7.最大值、最小值和它们的位置
- 8.平均颜色或平均灰度
- 9.极点
翻译及二次校对:cvtutorials.com
编辑者:廿瓶鲸(和鲸社区Siby团队成员)
3.9 OpenCV中的轮廓线
3.9.1 轮廓线:入门
目标
- 理解什么是轮廓线。
- 学习查找轮廓、绘制轮廓等。
- 你将看到这些函数:cv.findContours(), cv.drawContours()
什么是轮廓线?
轮廓线可以简单地解释为连接所有连续点(沿边界)的曲线,具有相同的颜色或灰度。轮廓线是形状分析和物体检测与识别的一个有用工具。
- 为了获得更好的准确性,使用二进制图像。因此,在寻找轮廓线之前,应用阈值或Canny边缘检测。
- 从OpenCV 3.2开始,findContours()不再修改源图像了。
- 在OpenCV中,寻找轮廓线就像从黑色背景中寻找白色物体。所以请记住,要找到的物体应该是白色的,背景应该是黑色的。
让我们来看看如何找到二进制图像的轮廓线。
import numpy as np
import cv2 as cv
im = cv.imread('test.jpg')
imgray = cv.cvtColor(im, cv.COLOR_BGR2GRAY)
ret, thresh = cv.threshold(imgray, 127, 255, 0)
contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
cv.findContours()函数中有三个参数,第一个是源图像,第二个是轮廓检索模式,第三个是轮廓逼近方法。然后它输出轮廓线和层次结构。轮廓线是一个包含图像中所有轮廓线的Python列表。每个单独的轮廓线是一个Numpy数组,包含物体边界点的(x,y)坐标。
注意:我们将在后面详细讨论第二个和第三个参数以及层次结构。在那之前,代码样本中给它们的值对所有的图像都能正常工作。
如何绘制轮廓线?
为了绘制轮廓线,我们使用了cv.drawContours函数。它也可以用来绘制任何形状,只要你有它的边界点。它的第一个参数是源图像,第二个参数是轮廓线,应该以Python列表的形式传递,第三个参数是轮廓线的索引(在绘制单个轮廓线时很有用。 要绘制所有轮廓线,传递-1),其余参数是颜色、厚度等。
- 绘制一幅图像中的所有轮廓线。
cv.drawContours(img, contours, -1, (0,255,0), 3)
- 要画一个单独的轮廓,比如说第4个轮廓。
cv.drawContours(img, contours, 3, (0,255,0), 3)
- 但在大多数时候,下面的方法会很有用。
cnt = contours[4]
cv.drawContours(img, [cnt], 0, (0,255,0), 3)
注意事项:最后两种方法是一样的,但是你会发现最后一种方法更有用。
轮廓线逼近法
这是cv.findContours函数的第三个参数。它实际上表示什么呢?
上面我们说过,轮廓线是具有相同灰度的形状的边界。它存储了一个形状的边界的(x,y)坐标。但它是否存储了所有的坐标?这是由这个轮廓逼近方法指定的。
如果你传递cv.CHAIN_APPROX_NONE,所有的边界点都会被存储。但实际上我们需要所有的点吗?例如,你找到了一条直线的轮廓。你需要这条线上的所有点来表示这条直线吗?不,我们只需要那条线的两个端点。这就是cv.CHAIN_APPROX_SIMPLE的作用。它删除了所有多余的点并压缩了轮廓,从而节省了内存。
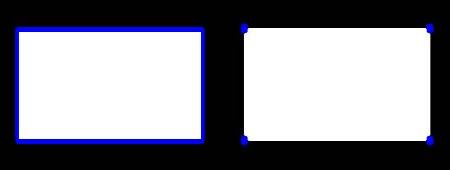
下面是一个矩形的图片,演示了这个技术。只要在轮廓线数组中的所有坐标上画一个圆(用蓝色画)。第一张图片显示了我用cv.CHAIN_APPROX_NONE得到的点(734个点),第二张图片显示了用cv.CHAIN_APPROX_SIMPLE的点(只有4个点)。看,它节省了多少内存!!!。
3.9.2 轮廓线的特征
在这篇文章中,我们将学习
- 找到轮廓的不同特征,如面积、周长、中心点、边界盒等。
- 你会看到很多与轮廓线有关的函数。
1. 矩
图像矩帮助你计算一些特征,如物体的质心、物体的面积等。
函数cv.ments()给出了一个所有计算出的矩的字典。见下文:
import numpy as np
import cv2 as cv
img = cv.imread('star.jpg',0)
ret,thresh = cv.threshold(img,127,255,0)
contours,hierarchy = cv.findContours(thresh, 1, 2)
cnt = contours[0]
M = cv.moments(cnt)
print(M)
从这个矩,你可以提取有用的数据,如面积、中心点等。中心点是由Cx=M10/M00和Cy=M01/M00的关系给出的。这可以按以下方式进行。
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
2. 轮廓线面积
轮廓线面积由函数cv.contourArea()或从矩M[‘m00’]给出。
area = cv.contourArea(cnt)
3. 轮廓线周长
它也被称为弧长。它可以用cv.arcLength()函数计算出来。第二个参数指定形状是一个封闭的轮廓(如果传递的是True),还是只是一条曲线。
perimeter = cv.arcLength(cnt,True)
4. 轮廓逼近
它根据我们指定的精度,将一个轮廓形状逼近到另一个顶点数量较少的形状。它是Douglas-Peucker算法的一个实现。
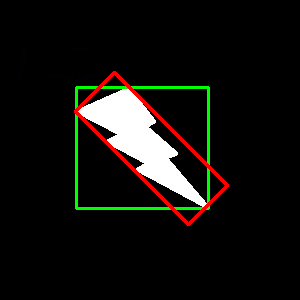
为了理解这一点,假设你试图在图像中找到一个正方形,但由于图像中的一些问题,你没有得到一个完美的正方形,而是一个 “坏形状”(如下图所示)。现在,你可以用这个函数来近似地处理这个形状。在这个函数中,第二个参数叫做epsilon,它是轮廓到近似轮廓的最大距离。它是一个精度参数。为了得到正确的输出,需要明智地选择epsilon。
epsilon = 0.1*cv.arcLength(cnt,True)
approx = cv.approxPolyDP(cnt,epsilon,True)
下面,在第二张图片中,绿线显示了epsilon为弧长的10%时的近似曲线。第三张图显示的是epsilon为弧长的1%时的情况。第三个参数指定曲线是否是封闭的。

5. 凸面体
凸面体看起来与轮廓逼近相似,但它不是(两者在某些情况下可能提供相同的结果)。在这里,cv.convexHull()函数检查曲线是否有凸性缺陷并进行修正。一般来说,凸形曲线是指总是凸出来的曲线,或者至少是平的。而如果是向内隆起,则被称为凸性缺陷。例如,请看下面的手的图片。红线表示手的凸体。双面的箭头标志显示了凸性缺陷,这是局部最大凸包与轮廓的偏差。

关于它的语法,有一点需要讨论。
hull = cv.convexHull(point[, hull[, clockwise[, returnPoints])
参数细节:
- points是我们传入的轮廓线。
- hull是输出,通常我们避免使用它。
- clockwise:方向标志。如果它是True,输出的凸面体是顺时针方向的。否则,它的方向是逆时针的。
- returnPoints : 默认为 “真”。然后,它返回凸包点的坐标。如果是False,它返回与凸包点对应的轮廓点的索引。
因此,要得到上图中的凸包,只需按以下方法即可:
hull = cv.convexHull(cnt)
但是如果你想找到凸性缺陷,你需要传递returnPoints = False。为了理解它,我们将采取上面的矩形图像。首先,我发现它的轮廓为cnt。现在我用returnPoints = True找到了它的凸面,我得到了以下值。[[234 202]], [[51 202]], [[51 79]], [[234 79]]是矩形的四个角点。现在如果用returnPoints = False做同样的事情,我得到的结果是:[[129], [67], [0], [142]]。这些是轮廓线中相应的点的索引。例如,检查第一个值:cnt[129] = [[234, 202]],这与第一个结果相同(其他的也是如此)。
当我们讨论凸性缺陷时,你会再次看到它。
6. 检查凸性
有一个函数可以检查一条曲线是否是凸的,即cv.isContourConvex()。它只是返回True或False。没什么大不了的。
k = cv.isContourConvex(cnt)
7. 边界矩形
有两种类型的边界矩形。
7.a. 直线边界矩形
这是一个直线矩形,它不考虑物体的旋转。因此,边界矩形的面积不会是最小的。它是由函数cv.boundingRect()找到的。
(x,y)为矩形的左上角坐标,(w,h)为其宽度和高度。
x,y,w,h = cv.boundingRect(cnt)
cv.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2)
7.b. 旋转的矩形
这里,边界矩形是以最小面积绘制的,所以它也考虑了旋转。使用的函数是cv.minAreaRect()。它返回一个包含以下细节的Box2D结构–(中心(x,y),(宽度,高度),旋转的角度)。但是要画这个矩形,我们需要矩形的4个角。它可以通过函数cv.boxPoints()获得
rect = cv.minAreaRect(cnt)
box = cv.boxPoints(rect)
box = np.int0(box)
cv.drawContours(img,[box],0,(0,0,255),2)
两个矩形都显示在一张图片上。绿色矩形显示的是正常的边界矩形。红色矩形是旋转后的矩形。
8. 最小包围圈
接下来,我们使用cv.minEnclosingCircle()函数找到一个物体的圆。它是一个以最小面积完全覆盖物体的圆。
(x,y),radius = cv.minEnclosingCircle(cnt)
center = (int(x),int(y))
半径 = int(radius)
cv.circle(img,center,radius,(0,255,0),2)

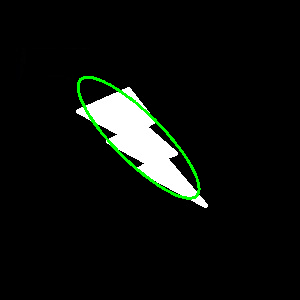
9. 拟合椭圆
下一个是将一个椭圆拟合到一个物体上。它返回旋转后的矩形以及内接的椭圆。
ellipse = cv.fitEllipse(cnt)
cv.ellipse(img,ellipse,(0,255,0),2)
10. 拟合直线
同样地,我们可以将一条线拟合到一组点上。下面的图片包含一组白色的点。我们可以对它进行近似的直线拟合。
rows,cols = img.shape[:2] 。
[vx,vy,x,y] = cv.fitLine(cnt, cv.DIST_L2,0,0.01,0.01)
lefty = int((-x*vy/vx) + y)
righty = int(((cols-x)*vy/vx)+y)
cv.line(img,(cols-1,righty),(0,lefty),(0,255,0) ,2)

3.9.3 轮廓属性
在这里,我们将学习如何提取一些常用的物体属性,如实体性、等效直径、掩膜图像、平均灰度等。更多的特征可以在Matlab regionprops文档中找到。
(注意:中心点、面积、周长等也属于这一类,但我们在上一章已经看到了)
1.纵横比
它是物体的边界矩形的宽度和高度的比率。
A s p e c t R a t i o = W i d t h H e i g h t Aspect \; Ratio = \frac{Width}{Height} AspectRatio=HeightWidth
x,y,w,h = cv.boundingRect(cnt)
aspect_ratio = float(w)/h
2.外延
外延是指轮廓线面积与边界矩形面积的比率。
E x t e n t = O b j e c t A r e a B o u n d i n g R e c t a n g l e A r e a Extent = \frac{Object \; Area}{Bounding \; Rectangle \; Area} Extent=BoundingRectangleAreaObjectArea
area = cv.contourArea(cnt)
x,y,w,h = cv.boundingRect(cnt)
rect_area = w*h
extent = float(area)/rect_area
3.实体性
实体性是指轮廓面积与凸包面积的比率。
S o l i d i t y = C o n t o u r A r e a C o n v e x H u l l A r e a Solidity = \frac{Contour \; Area}{Convex \; Hull \; Area} Solidity=ConvexHullAreaContourArea
area = cv.contourArea(cnt)
hull = cv.convexHull(cnt)
hull_area = cv.contourArea(hull)
solidity = float(area)/hull_area
4.等效直径
等效直径是指其面积与轮廓面积相同的圆的直径。
E q u i v a l e n t D i a m e t e r = 4 × C o n t o u r A r e a π Equivalent \; Diameter = \sqrt{\frac{4 \times Contour \; Area}{\pi}} EquivalentDiameter=π4×ContourArea
area = cv.contourArea(cnt)
equi_diameter = np.sqrt(4*area/np.pi)
5.方向
方向是指物体指向的角度。以下方法也给出了主轴和次轴的长度。
(x,y),(MA,ma),angle = cv.fitEllipse(cnt)
6.掩膜和像素点
在某些情况下,我们可能需要包括该对象的所有点。可以按以下方式进行:
mask = np.zeros(imgray.shape,np.uint8)
cv.drawContours(mask,[cnt],0,255,-1)
pixelpoints = np.transpose(np.nonzero(mask))
#pixelpoints = cv.findNonZero(mask)
这里给出了两种方法,一种是使用Numpy函数,另一种是使用OpenCV函数(最后一行注释)来做同样的事情。结果也是一样的,但有一点不同。Numpy给出的坐标是(行,列)格式,而OpenCV给出的坐标是(x,y)格式。所以基本上答案会互换。注意,row=y,column=x。
7.最大值、最小值和它们的位置
我们可以用掩膜图像找到这些参数。
min_val, max_val, min_loc, max_loc = cv.minMaxLoc(imgray,mask = mask)
8.平均颜色或平均灰度
在这里,我们可以找到一个物体的平均颜色。也可以是灰度模式下物体的平均灰度。我们再次使用相同的掩膜来做这件事。
mean_val = cv.mean(im,mask = mask)
9.极点
极点指的是物体的最上面、最下面、最右边和最左边的点。
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])
例如,如果我把它应用于印度地图,我得到以下结果。

相关文章:
OpenCV中的图像处理3.9(六)轮廓线特征与属性
目录 3.9 OpenCV中的轮廓线3.9.1 轮廓线:入门目标什么是轮廓线?如何绘制轮廓线?轮廓线逼近法 3.9.2 轮廓线的特征1. 矩2. 轮廓线面积3. 轮廓线周长4. 轮廓逼近5. 凸面体6. 检查凸性7. 边界矩形8. 最小包围圈9. 拟合椭圆10. 拟合直线 3.9.3 轮…...
burpsuite+xray实现联动测试(手动分析和自动化测试同时进行)
目的:安全测试过程中手动分析测试与xray自动化扫描测试结合,这样可以从多层保障安全测试的分析,针对平台业务接口量大的安全测试是十分有用的,可以实现双向测试同时开始。 xray简介 xray 是一款功能强大的安全评估工具ÿ…...
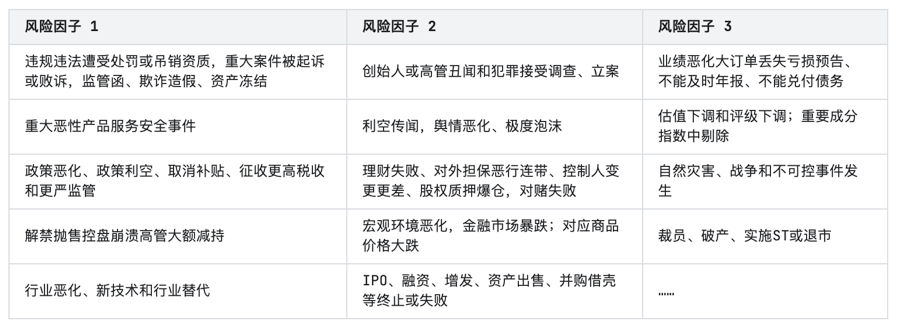
2023年专业连锁行业研究报告
第一章 行业概况 专业连锁行业是指以连锁经营模式运营的公司,其主要业务涵盖零售、餐饮、酒店、医疗、教育等领域。这些公司通过规模化、标准化的经营模式和供应链管理,提供专业化、高质量的产品和服务。专业连锁行业在全球范围内蓬勃发展,并…...

Mysql数据库(六):基本的SELECT语句
基本的SELECT语句 前言一、SELECT...二、SELECT ... FROM三、列的别名四、去除重复行五、空值参与运算六、着重号七、查询常数八、显示表结构九、过滤数据 前言 本博主将用CSDN记录软件开发求学之路上亲身所得与所学的心得与知识,有兴趣的小伙伴可以关注博主&#…...

在CentOS7环境中,实现使用openresty配置文件,达到jwt指定用户userid不能访问的效果
#在CentOS7环境中,实现使用openresty配置文件,达到jwt指定用户userid不能访问的效果。 首先,你需要安装 OpenResty 和 JWT 组件: 安装 OpenResty 参考 OpenResty 的官方安装文档,在终端执行如下命令: $…...
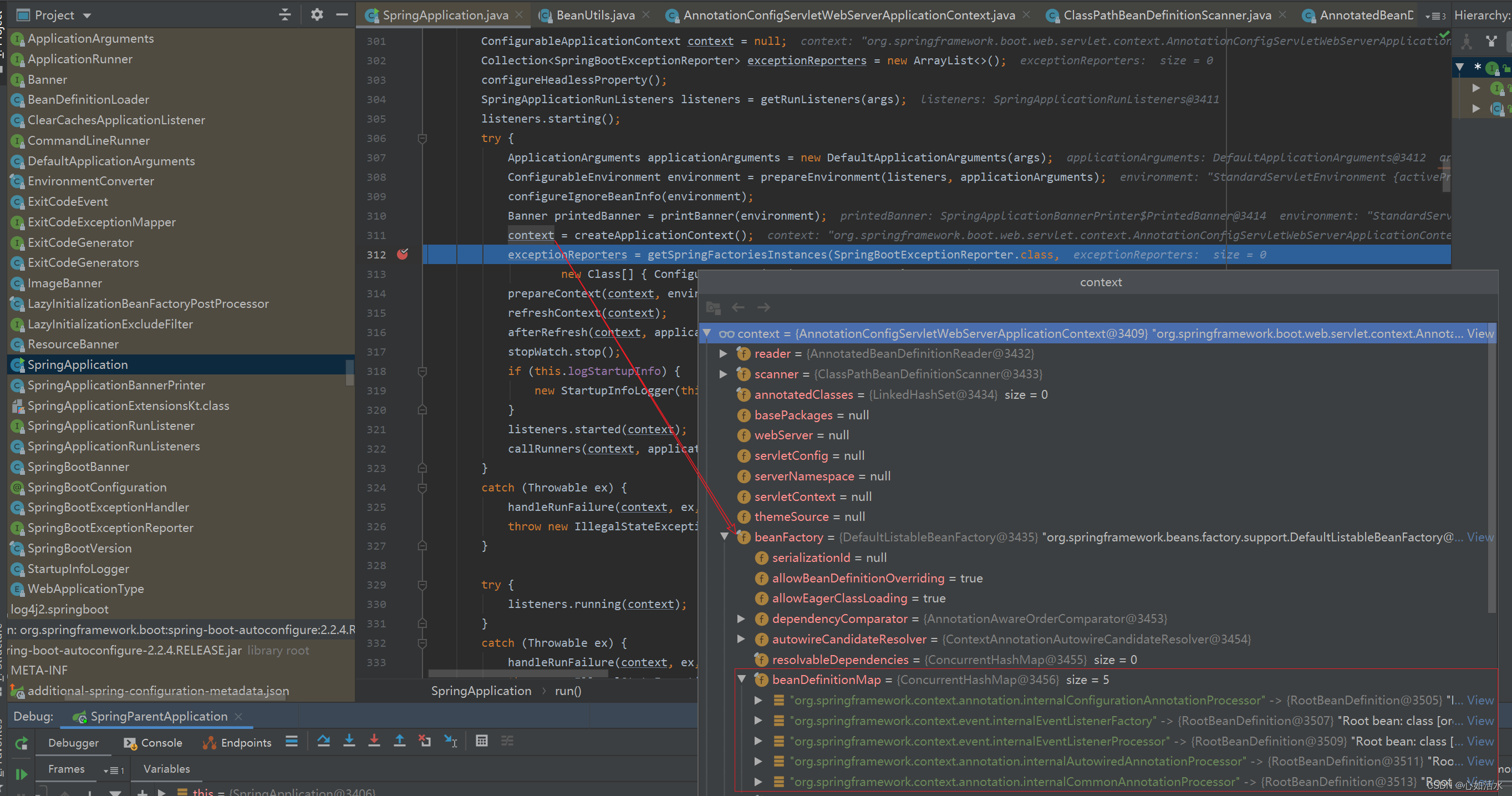
SpringBoot 源码分析初始化应用上下文(1)-createApplicationContext
前言:springBoot的版本是 2.2.4.RELEASE 一、入口 /*** Run the Spring application, creating and refreshing a new* {link ApplicationContext}.* param args the application arguments (usually passed from a Java main method)* return a running {link A…...

STM32队列
目录 什么是队列? 队列特点 1. 数据入队出队方式 2. 数据传递方式 3. 多任务访问 4. 出队、入队阻塞 队列相关 API 函数 1. 创建队列 参数: 2. 写队列 参数: 返回值: 3. 读队列 参数: 返回值…...
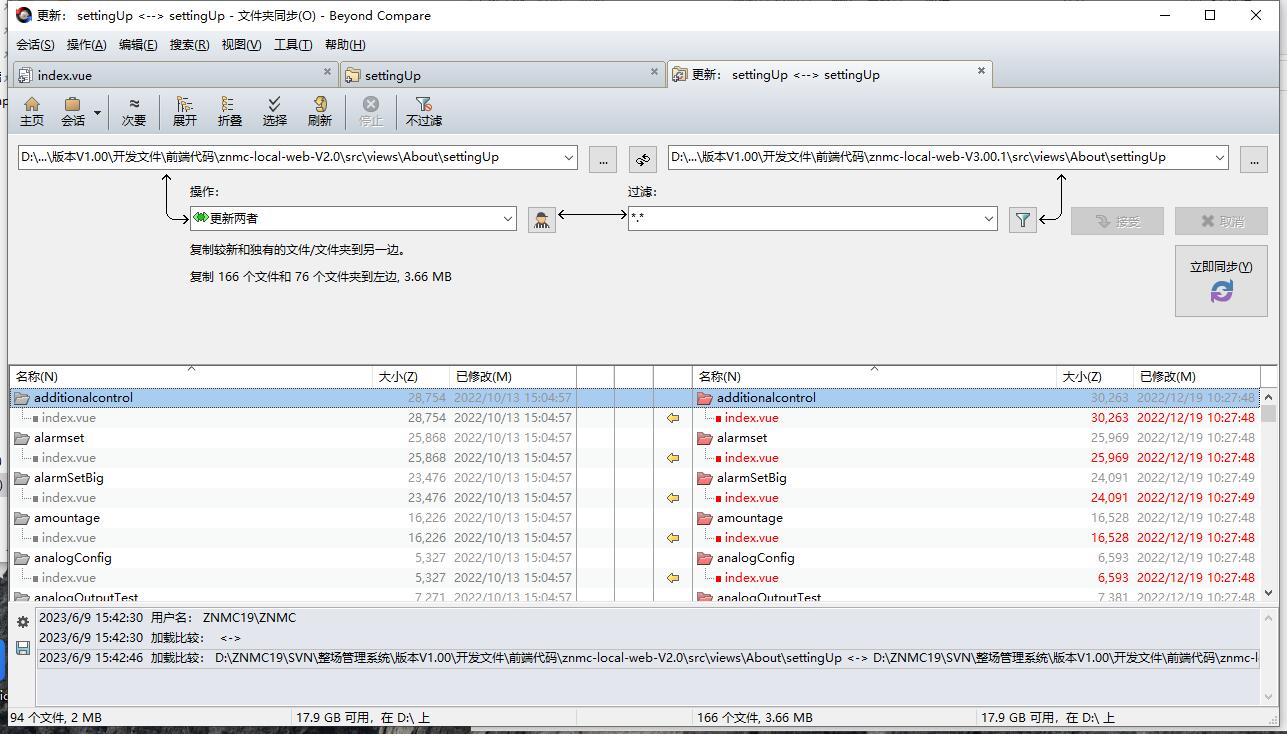
探索Beyond Compare:让文件比较和管理变得简单高效
在这个信息爆炸时代,我们的日常生活和工作中需要处理大量的数据和文档。在这个过程中,有时候我们会面临找出不同文件之间的差异、合并重复内容等需求。那么,有没有一款软件可以帮助我们轻松地完成这些任务呢?答案当然是肯定的&…...
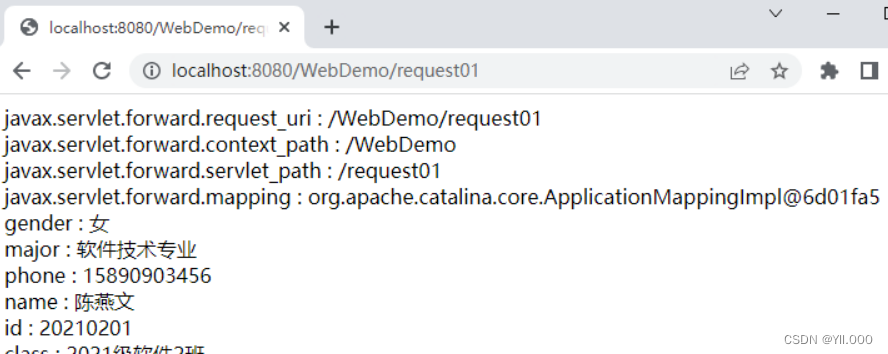
动态网站Servelt基础
文章目录 一、Servlet基础(一)Servlet概述1、Servlet是什么2、Servlet容器3、Servlet应用程序的体系结构 (二)Servlet的特点1、功能强大2、可移植3、性能高效4、安全性高5、可扩展 (三)Servlet接口1、Servl…...

Docker 网络
Docker 网络实现原理 Docker使用Linux桥接,在宿主机虚拟一个Docker容器网桥(docker0),Docker启动一个容器时会根据Docker网桥的网段分配给容器一个IP地址,称为Container-IP,同时Docker网桥是每个容器的默认网关。因为在同一宿主机…...
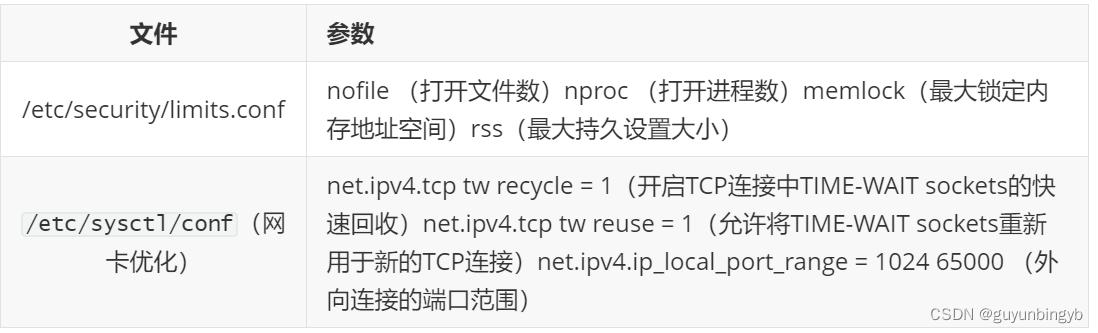
Tomcat的优化
Tomcat的优化 一、Tomcat 优化Tomcat 配置文件参数优化 二、系统内核优化三、Tomcat 配置 JVM 参数:参数含义 一、Tomcat 优化 Tomcat默认安装下的缺省配置并不适合生产环境,它可能会频繁出现假死现象需要重启,只有通过不断压测优化才能让它…...

一个问题来对比文心一言和chatgpt
问题: 请注意, 孩子不会说话,他无法用语言来回复妈妈的问题, 请生成以下剧本:一个妈妈和一岁不会说话的婴儿的日常vlog的剧本 文心一言 场景一:早晨 (妈妈和孩子在客厅里醒来) 妈妈&…...
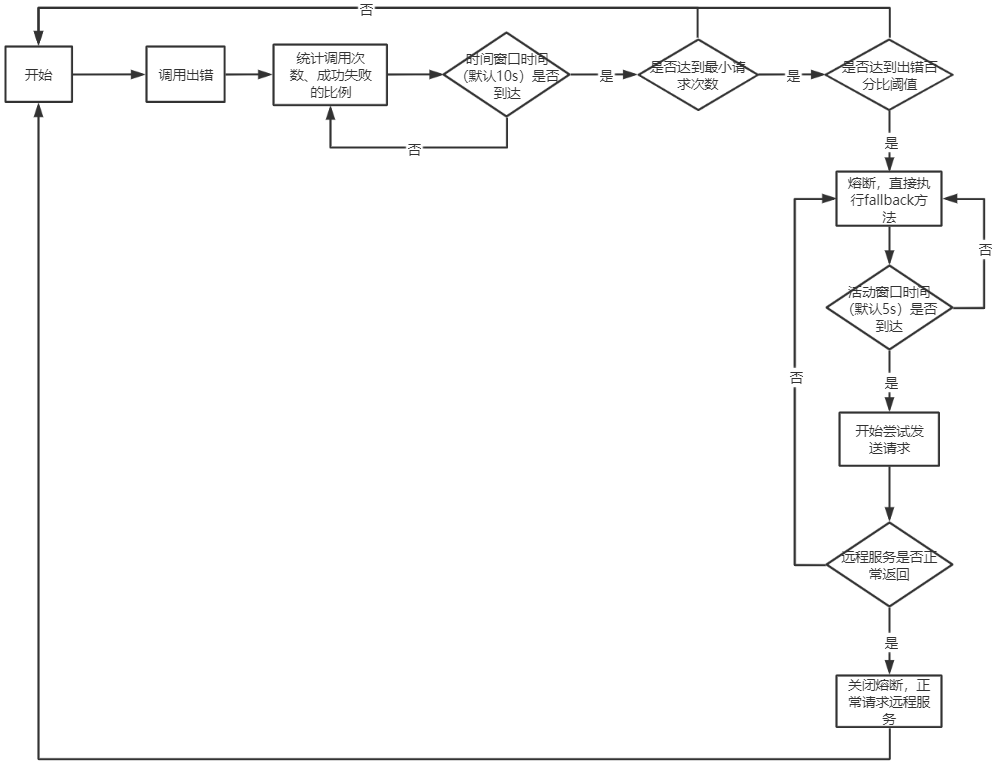
防雪崩利器之Hystrix
Hystrix作为一个容错组件,本文从它的作用、熔断设计、工作流程和应用方面一一道来,帮助大家了解如何使用。 1、什么是灾难性雪崩效应 要讲Hystrix,我们就要讲一种场景,在微服务架构中,如果底层服务出现故障࿰…...
)
机器学习复习(上)
严正声明:本文的答案是ChatGPT的回答,仅供参考,不代表就是正确答案!!! 1.解释什么是过拟合和欠拟合,如何降低过拟合? 过拟合(overfitting)指的是一个模型在训练数据上表…...

node笔记_express结合formidable实现前后端的文件上传
文章目录 ⭐前言⭐安装http请求的文件解析依赖库💖 安装 formidable💖 node formidable接受formData上传参数 ⭐上传的页面搭建💖 vue2 element upload💖 node 渲染 上传文件 ⭐后端生成api上传文件到指定目录💖完整的…...
CKA 09_Kubernetes工作负载与调度 资源调度 三类QoS request 资源需求 limit 资源限额
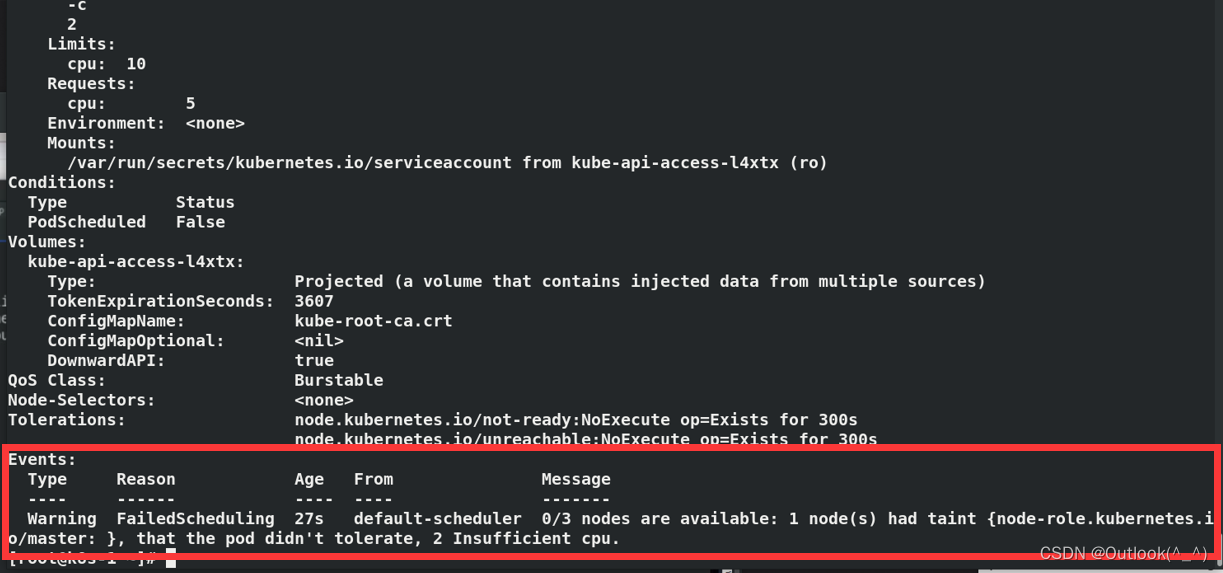
文章目录 1. 资源调度1.1 准备工作1.2 为什么需要 request 和 limit1.3 内存限制1.3.1 Brustable1.3.2 Guaranteed1.3.3 BestEffort1.3.4 当容器申请的资源超出 limit 和 request 1.4 CPU限制 1. 资源调度 1.1 准备工作 Kubernetes 采用 request 和 limit 两种限制类型来对资源…...
【pytorch】维度变换
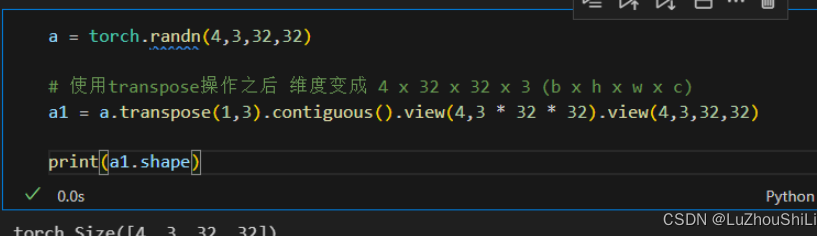
【pytorch】维度变换 View操作unSqueeze操作图片处理的一个案例squeeze 维度删减操作维度扩展-expand维度扩展-repeat矩阵的转置操作-transpose View操作 将一个四维的张量(b x c x h x w)转换成一个二维的张量 对于四张图片 将每一张图像用一行向量进…...
)
vue3中的nextTick()
目录 nextTick() 方法用法回调函数方式使用await方式使用 实现原理使用nextTick() 方法时的注意事项 nextTick() 方法 nextTick() 方法是一个非常强大的工具,是一个等待下一次 DOM 更新刷新的工具方法。用于将一个函数以异步的方式推迟到下一个 DOM 更新周期执行。…...
高效学习传感器|霍尔式传感器
01、霍尔式传感器的工作原理 1●霍尔效应 霍尔式传感器的物理基础是霍尔效应。如图1所示,在一块长度为l、宽度为b、厚度为d的长方体导电板上,左、右、前、后侧面都安装上电极。在长度方向上通入电流I,在厚度方向施加磁感应强度为B的磁场。 ■…...
2023年前端面试高频考点HTML5+CSS3
目录 浏览器的渲染过程⭐⭐⭐ CSS 、JS 阻塞 DOM 解析和渲染 回流(重排)和重绘⭐⭐ 选择器 ID选择器、类选择器、标签选择器(按优先级高到低排序)⭐⭐ 特殊符号选择器(>,,~,空格࿰…...

使用docker在3台服务器上搭建基于redis 6.x的一主两从三台均是哨兵模式
一、环境及版本说明 如果服务器已经安装了docker,则忽略此步骤,如果没有安装,则可以按照一下方式安装: 1. 在线安装(有互联网环境): 请看我这篇文章 传送阵>> 点我查看 2. 离线安装(内网环境):请看我这篇文章 传送阵>> 点我查看 说明:假设每台服务器已…...

CVPR 2025 MIMO: 支持视觉指代和像素grounding 的医学视觉语言模型
CVPR 2025 | MIMO:支持视觉指代和像素对齐的医学视觉语言模型 论文信息 标题:MIMO: A medical vision language model with visual referring multimodal input and pixel grounding multimodal output作者:Yanyuan Chen, Dexuan Xu, Yu Hu…...

PPT|230页| 制造集团企业供应链端到端的数字化解决方案:从需求到结算的全链路业务闭环构建
制造业采购供应链管理是企业运营的核心环节,供应链协同管理在供应链上下游企业之间建立紧密的合作关系,通过信息共享、资源整合、业务协同等方式,实现供应链的全面管理和优化,提高供应链的效率和透明度,降低供应链的成…...
DAY 47
三、通道注意力 3.1 通道注意力的定义 # 新增:通道注意力模块(SE模块) class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_rat…...
【JVM】- 内存结构
引言 JVM:Java Virtual Machine 定义:Java虚拟机,Java二进制字节码的运行环境好处: 一次编写,到处运行自动内存管理,垃圾回收的功能数组下标越界检查(会抛异常,不会覆盖到其他代码…...
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...

涂鸦T5AI手搓语音、emoji、otto机器人从入门到实战
“🤖手搓TuyaAI语音指令 😍秒变表情包大师,让萌系Otto机器人🔥玩出智能新花样!开整!” 🤖 Otto机器人 → 直接点明主体 手搓TuyaAI语音 → 强调 自主编程/自定义 语音控制(TuyaAI…...

ArcGIS Pro制作水平横向图例+多级标注
今天介绍下载ArcGIS Pro中如何设置水平横向图例。 之前我们介绍了ArcGIS的横向图例制作:ArcGIS横向、多列图例、顺序重排、符号居中、批量更改图例符号等等(ArcGIS出图图例8大技巧),那这次我们看看ArcGIS Pro如何更加快捷的操作。…...
的原因分类及对应排查方案)
JVM暂停(Stop-The-World,STW)的原因分类及对应排查方案
JVM暂停(Stop-The-World,STW)的完整原因分类及对应排查方案,结合JVM运行机制和常见故障场景整理而成: 一、GC相关暂停 1. 安全点(Safepoint)阻塞 现象:JVM暂停但无GC日志,日志显示No GCs detected。原因:JVM等待所有线程进入安全点(如…...
分布式增量爬虫实现方案
之前我们在讨论的是分布式爬虫如何实现增量爬取。增量爬虫的目标是只爬取新产生或发生变化的页面,避免重复抓取,以节省资源和时间。 在分布式环境下,增量爬虫的实现需要考虑多个爬虫节点之间的协调和去重。 另一种思路:将增量判…...