基于扩展(EKF)和无迹卡尔曼滤波(UKF)的电力系统动态状态估计(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
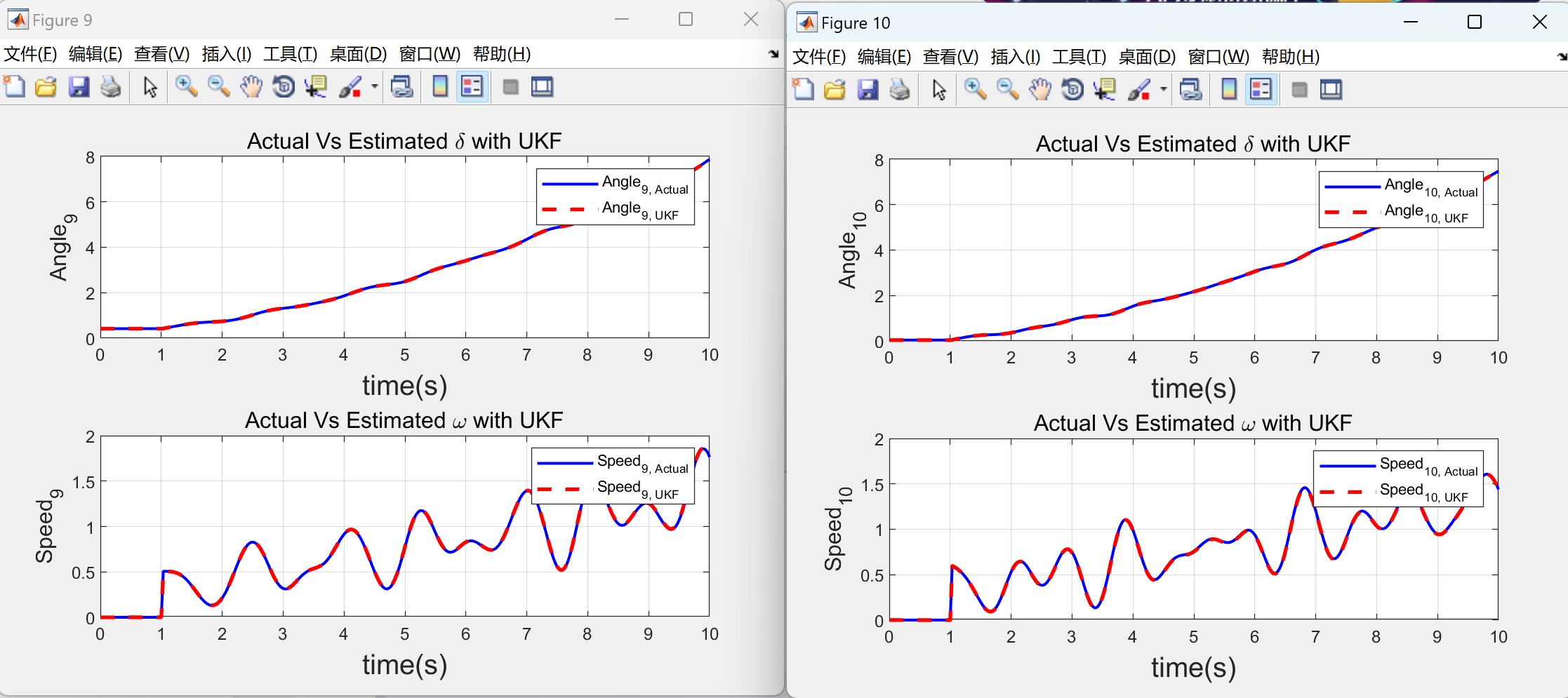
2.1 UKF
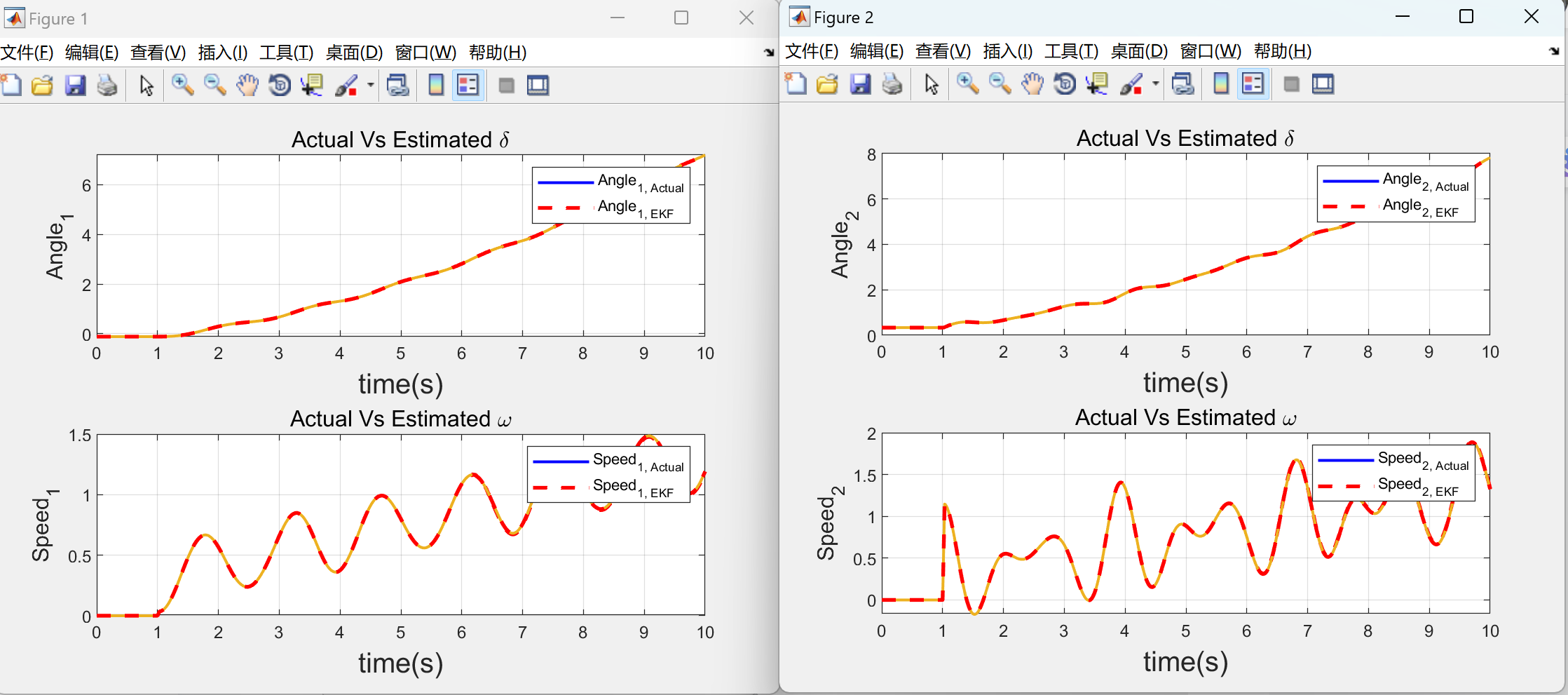
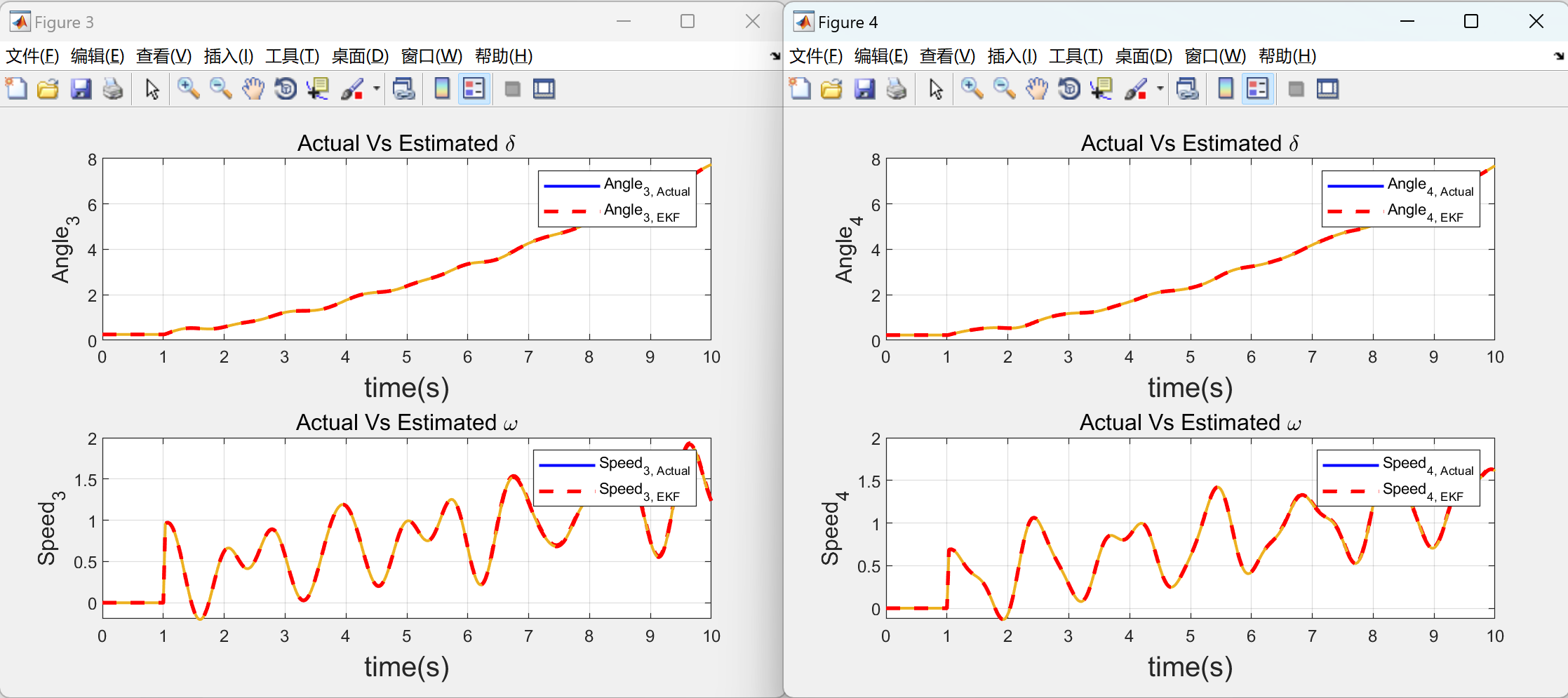
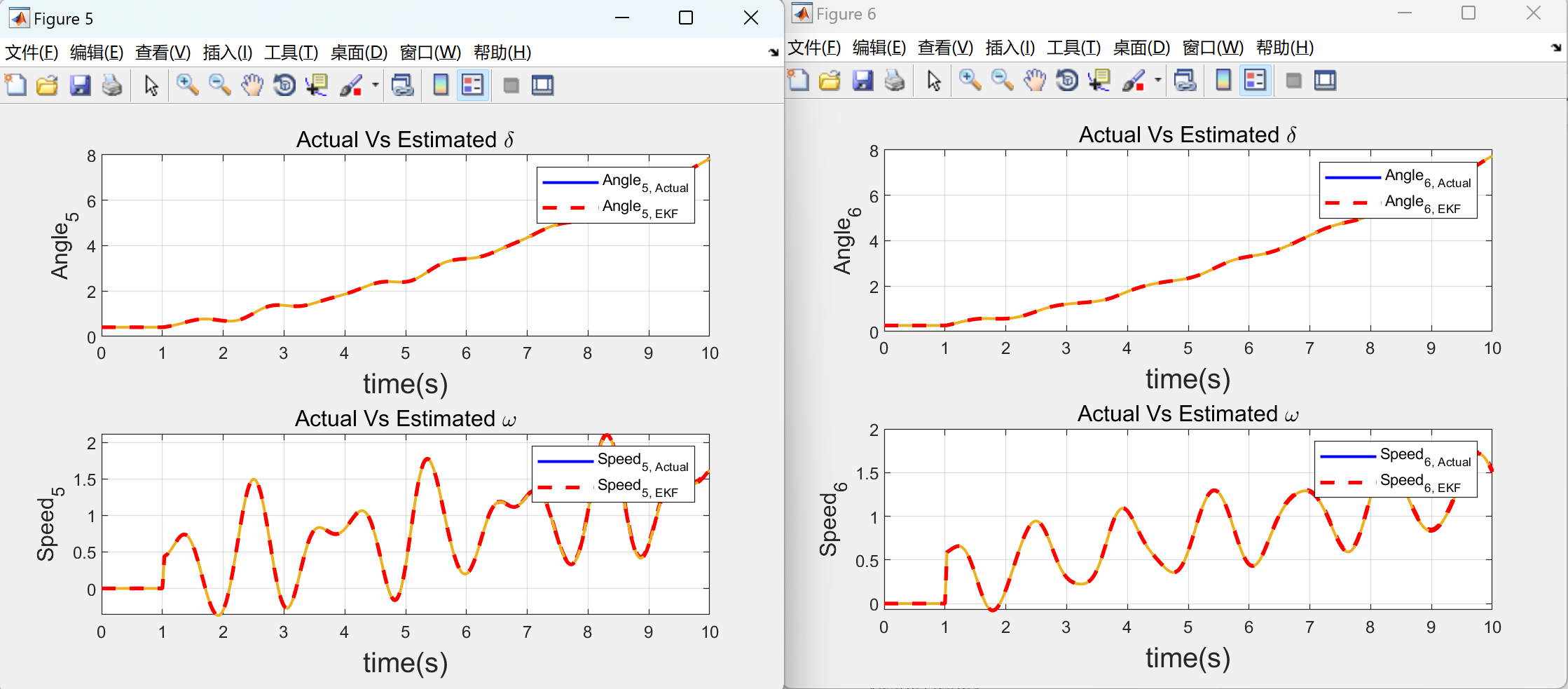
2.2 EKF
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
文献来源:
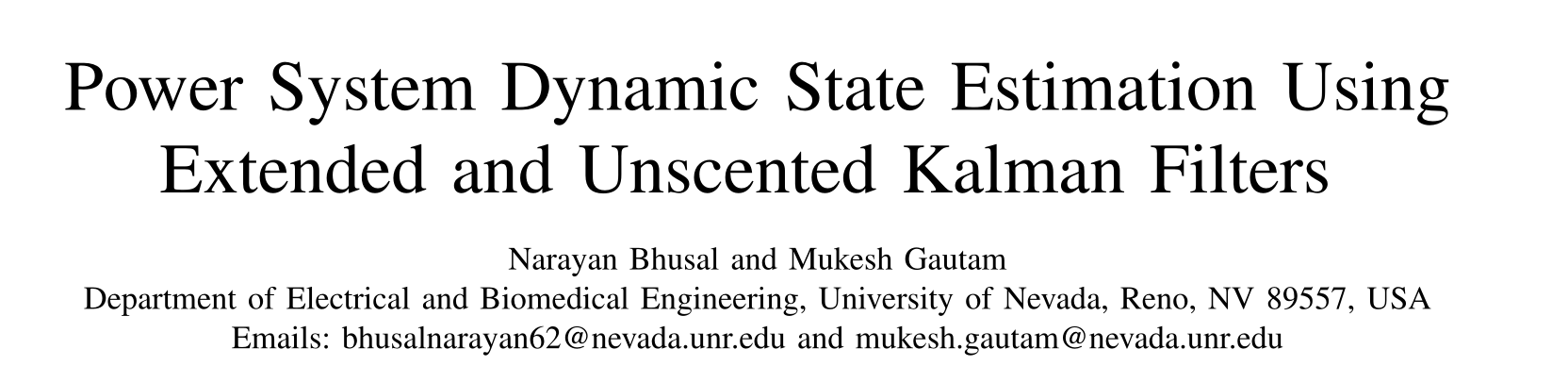
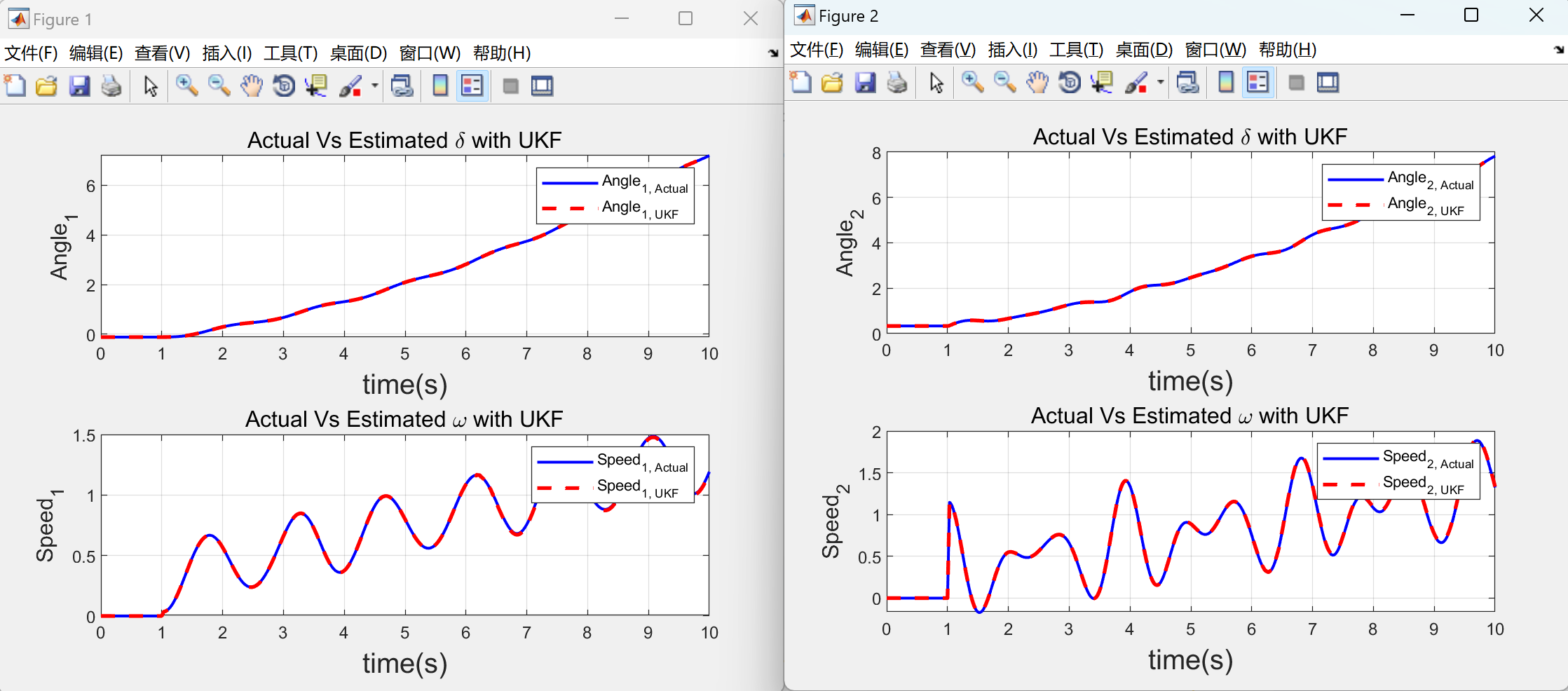
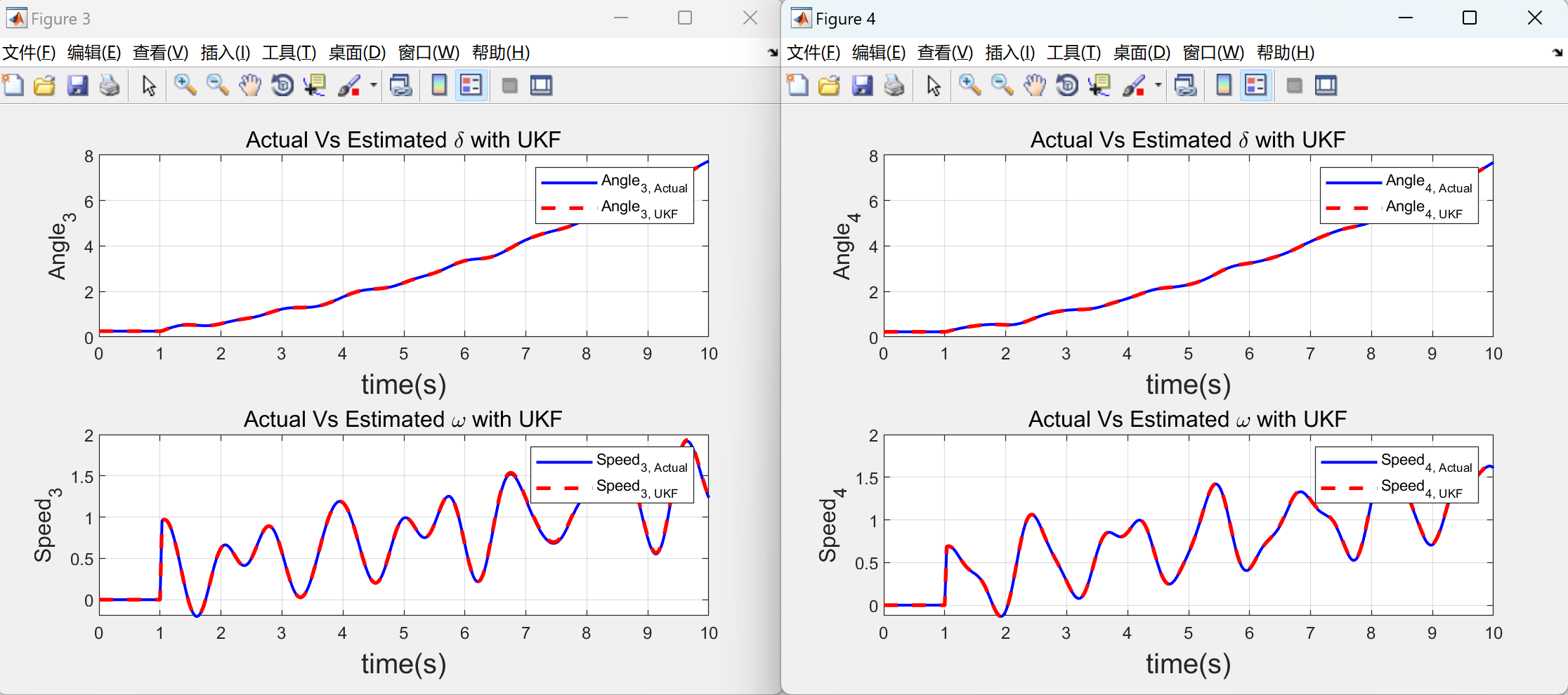
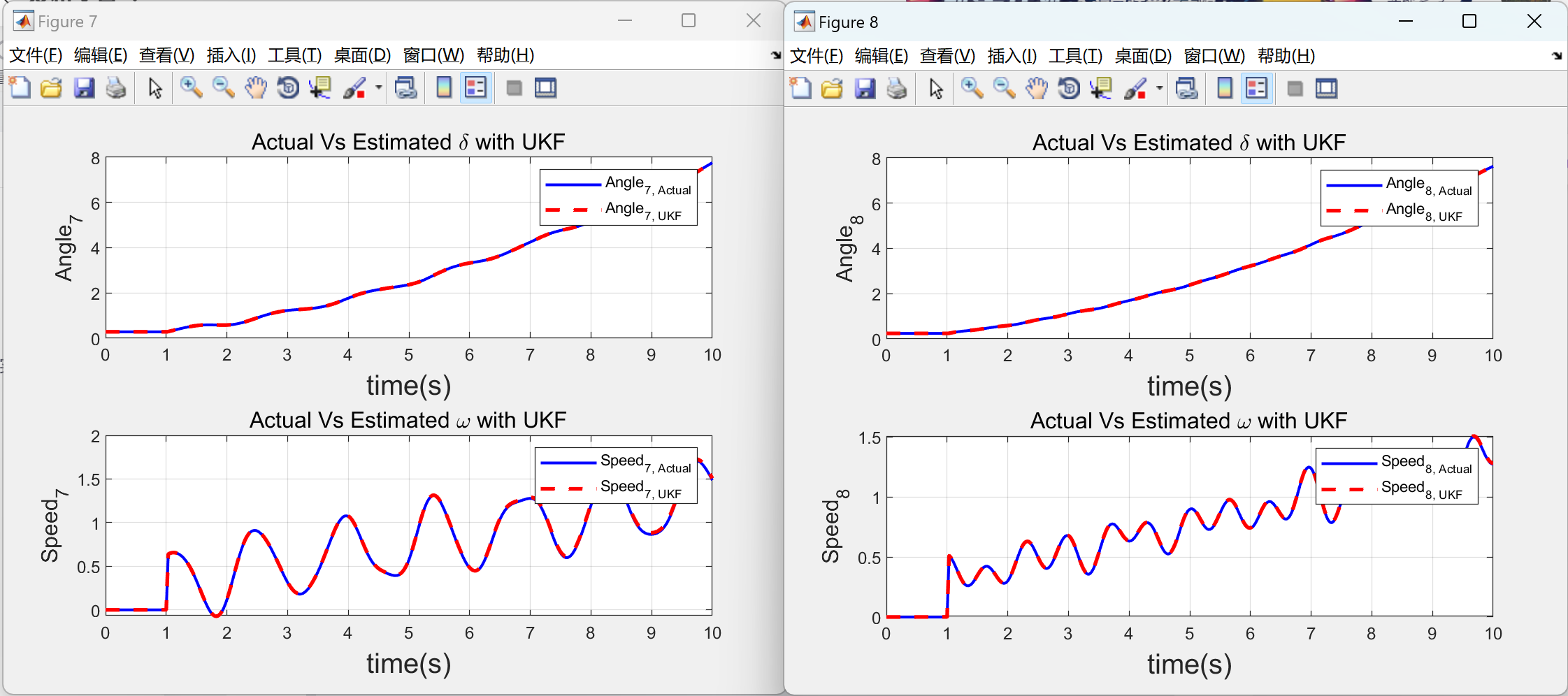
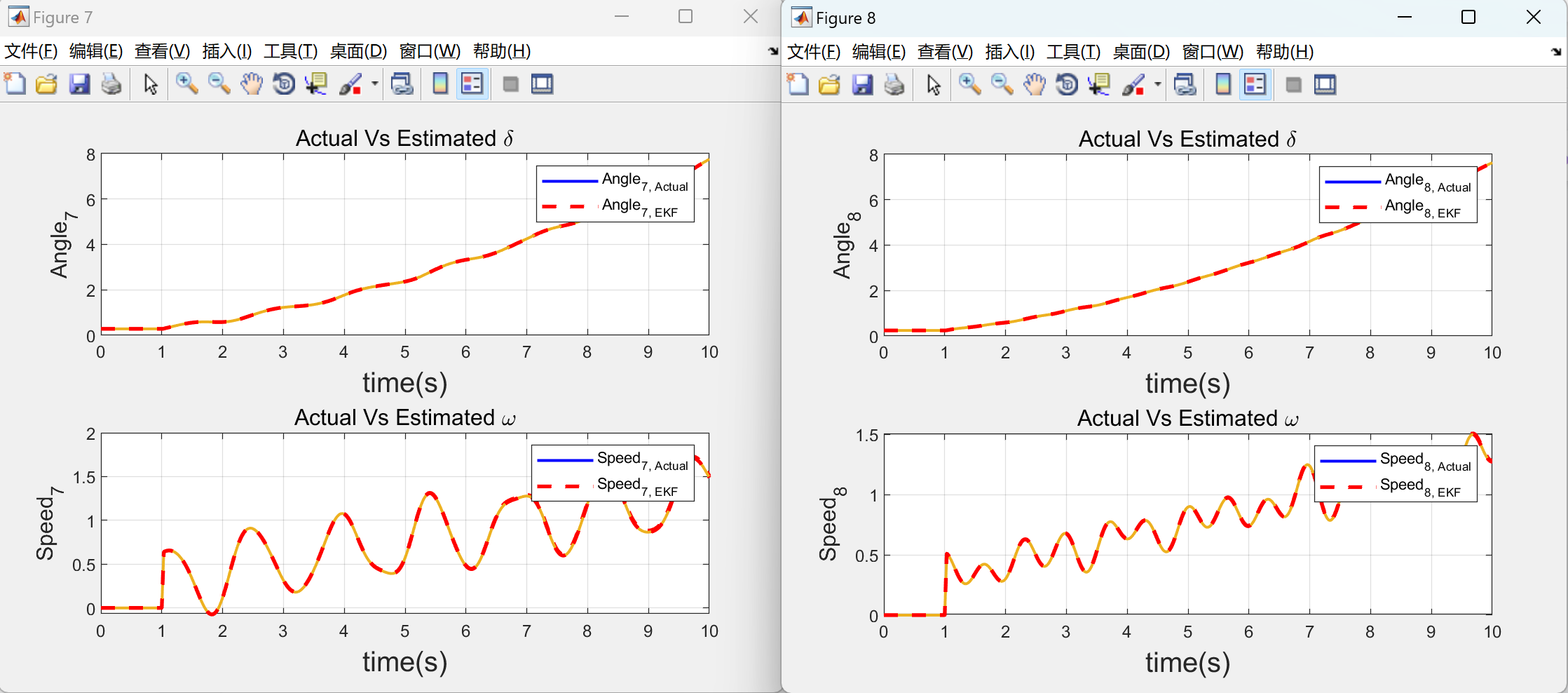
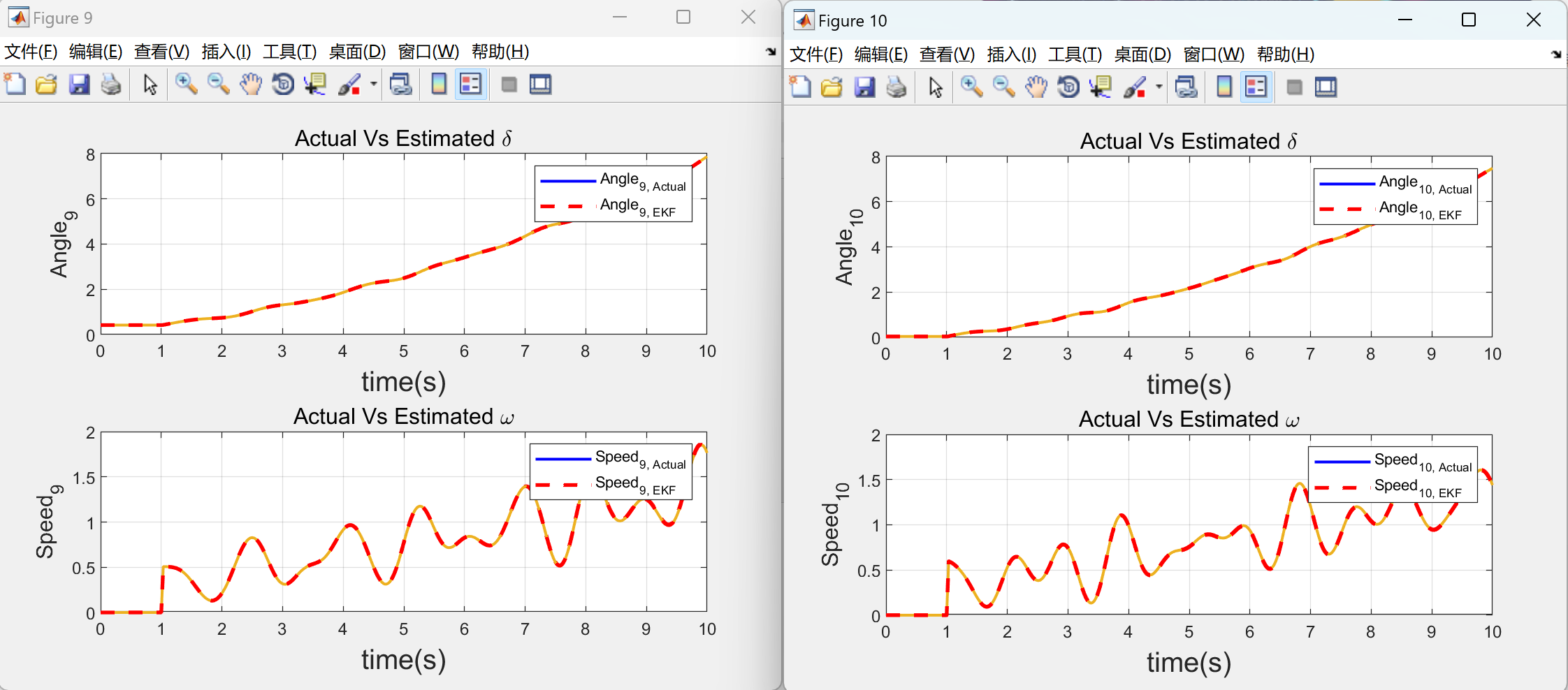
摘要:准确估计电力系统动态对于提高电力系统的可靠性、韧性、安全性和稳定性非常重要。随着逆变器型分布式能源的不断集成,对电力系统动态的了解比以往任何时候都更为必要和关键,以实现电力系统的正确控制和运行。尽管最近测量设备和传输技术的进展极大地减小了测量和传输误差,但这些测量仍然不完全摆脱测量噪声的影响。因此,需要对嘈杂的测量进行滤波,以获得准确的电力系统运行动态。本文使用扩展卡尔曼滤波器(EKF)和无迹卡尔曼滤波器(UKF)来估计电力系统的动态状态。我们对西部电力协调委员会(WECC)的3机9节点系统和新英格兰的10机39母线系统进行了案例研究。结果表明,UKF和EKF能够准确地估计电力系统的动态。本文还提供了对测试案例的EKF和UKF的比较性能。其他基于卡尔曼滤波技术和机器学习的估计器的信息将很快在本报告中更新。
关键词:扩展卡尔曼滤波(EKF)、电力系统动态状态估计、无迹卡尔曼滤波(UKF)。
原文摘要:
Abstract—Accurate estimation of power system dynamics is very important for the enhancement of power system relia-bility, resilience, security, and stability of power system. With the increasing integration of inverter-based distributed energy resources, the knowledge of power system dynamics has become more necessary and critical than ever before for proper control and operation of the power system. Although recent advancement of measurement devices and the transmission technologies have reduced the measurement and transmission error significantly, these measurements are still not completely free from the mea- surement noises. Therefore, the noisy measurements need to be filtered to obtain the accurate power system operating dynamics. In this work, the power system dynamic states are estimated using extended Kalman filter (EKF) and unscented Kalman filter (UKF). We have performed case studies on Western Electricity Coordinating Council (WECC)’s 3-machine 9-bus system and New England 10-machine 39-bus. The results show that the UKF and EKF can accurately estimate the power system dynamics. The comparative performance of EKF and UKF for the tested case is also provided. Other Kalman filtering techniques along
with the machine learning based estimator will be updated in this report soon. All the sources code including Newton Raphson power flow, admittance matrix calculation, EKF calculation, and
UKF calculation are publicly available in Github on Power System Dynamic State Estimation.
Index Terms—Extended Kalman filter (EKF), power system dynamic state estimation, and unscented Kalman filter (UKF).
📚2 运行结果
2.1 UKF

2.2 EKF
部分代码:
% Covariance Matrix
sig=1e-2;
P=sig^2*eye(ns); % Error covariance matrix
Q=sig^2*eye(ns); % system noise covariance matrix
R=sig^2*eye(nm); % measurment noise covariance matrix
X_hat=X_0;
X_est=[];
X_mes=[]; % Initial statel
% constant values
RMSE=[];
%Extended Kalman Filter (EKF) ALgorithm
for k=0:deltt:t_max
% Ybus and reconstruction matrix accodring to the requirement
if k<t_SW
ps=1;
elseif (t_SW<k)&&(k<=t_FC)
ps=2;
else
ps=3;
end
Ybusm = YBUS(:,:,ps);
RVm=RV(:, :, ps);
[~, X] = ode45(@(t,x) dynamic_system(t,x,M,D,Ybusm,E_abs,PM,n),[k k+deltt],X_0);
X_0=transpose(X(end, :));
X_mes=[X_mes X_0];
%determine the measurements
E1=E_abs.*exp(1j*X_0(1:n));
I1=Ybusm*E1;
PG=real(E1.*conj(I1));
QG=imag(E1.*conj(I1));
Vmag=abs(RVm*E1);
Vangle=angle(RVm*E1);
z=[PG; QG; Vmag; Vangle];
% determine Phi=df/fx
Phi=RK4partial(E_abs, X_hat, Ybusm, M, deltt, D, n);
%prediction
% [~, X1]= ode45(@(t,x) dynamic_system(t,x,M,D,Ybusm,E_abs,PM,n),[k k+deltt],X_hat);
% X_hat=transpose(X1(end, :));
X_hat=RK4(n, deltt, E_abs, ns, X_hat, PM, M, D, Ybusm);
P=Phi*P*transpose(Phi)+Q;
% correction
[H, zhat]=RK4H(E_abs, X_hat, Ybusm, s,n, RVm) ;
% Measurement update of state estimate and estimation error covariance
K=P*transpose(H)*(H*P*transpose(H)+R);
X_hat=X_hat+K*(z-zhat);
P=(eye(ns)-K*H)*P;
X_est=[X_est, X_hat];
RMSE=[RMSE, sqrt(trace(P))];
end
save('39_RMSE_EKF.mat', 'RMSE')
%% Plots
t= (0:deltt:t_max);
for i=1:1:n
figure(i)
subplot(2,1,1)
plot(t,X_mes(i, :), 'linewidth', 1.5)
hold on
plot(t, X_est(i, :), 'linestyle', '--', 'color', 'r', 'linewidth', 2);
grid on
ylabel(sprintf('Angle_{%d}', i), 'fontsize', 12)
xlabel('time(s)', 'fontsize', 15);
title('Actual Vs Estimated \delta', 'fontsize', 12)
legend(sprintf('Angle_{%d, Actual} ',i), sprintf('Angle_{%d, EKF}', i));
subplot(2,1,2)
plot(t,X_mes(i+n, :), 'linewidth', 1.5)
hold on
plot(t, X_est(i+n, :), 'linestyle', '--', 'color', 'r', 'linewidth', 2);
grid on
ylabel(sprintf('Speed_{%d}', i), 'fontsize', 12)
xlabel('time(s)', 'fontsize', 15);
title('Actual Vs Estimated \omega', 'fontsize', 12)
legend(sprintf('Speed_{%d, Actual} ',i), sprintf('Speed_{%d, EKF}', i));
% subplot(2,2,3)
% plot(t,X_mes(i+1, :), 'linewidth', 1.5)
% hold on
% plot(t, X_est(i+1, :), 'linestyle', '--', 'color', 'r', 'linewidth', 2);
% grid on
% ylabel(sprintf('Angle_{%d}', i+1), 'fontsize', 12)
% xlabel('time(s)', 'fontsize', 15);
% title('Measured Vs Eistimated \delta', 'fontsize', 12)
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
🌈4 Matlab代码实现
相关文章:
基于扩展(EKF)和无迹卡尔曼滤波(UKF)的电力系统动态状态估计(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
曲线拟合(MATLAB拟合工具箱)位置前馈量计算(压力闭环控制应用)
利用PLC进行压力闭环控制的项目背景介绍请查看下面文章链接,这里不再赘述。 信捷PLC压力闭环控制应用(C语言完整PD、PID源代码)_RXXW_Dor的博客-CSDN博客闭环控制的系列文章,可以查看PID专栏的的系列文章,链接如下:张力控制之速度闭环(速度前馈量计算)_RXXW_Dor的博客-CSD…...

小程序使用echarts
参考文档:echarts官网、echarts-for-weixin 第一步引入组件库,可直接从echarts-for-weixin下载,也可以从echarts官网自定义生成,这里我们就不贴了组件库引入好后,就是页面引用啦,废话不多说,直…...

面向对象——封装
C面向对象的三大特性为:封装、继承、多态 C认为万事万物都皆为对象,对象上有其属性和行为 例如: 人可以作为对象,属性有姓名、年龄、身高、体重…,行为有走、跑、跳、吃饭、唱歌… 车也可以作为对象…...
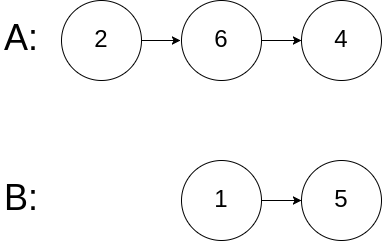
【LeetCode】160.相交链表
题目 给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表不存在相交节点,返回 null 。 图示两个链表在节点 c1 开始相交: 题目数据 保证 整个链式结构中不存在环。 注意,函数返回结…...

【JWT的使用】
文章目录 前言1、用户登录1.1 JWTThreadLocal 2.1 代码实现2.1.1 ThreadLocal工具类2.2.2 定义拦截器2.2.3 注册拦截器 前言 1、用户登录 1.1 JWT JSON Web Token简称JWT,用于对应用程序上用户进行身份验证的标记。使用 JWTS 之后不需要保存用户的 cookie 或其他…...

Python获取音视频时长
Python获取音视频时长 Python获取音视频时长1、安装插件2、获取音视频时长.py3、打包exe4、下载地址 Python获取音视频时长 1、安装插件 pip install moviepy -i https://pypi.tuna.tsinghua.edu.cn/simple2、获取音视频时长.py 上代码:获取音视频时长.py # -*-…...

TCP四次握手为什么客户端等待的时间是2MSL
目录 什么是MSL从第三次握手开始分析总结 什么是MSL MSL是Maximum Segment Lifetime英文的缩写,中文可以译为“报文最大生存时间”,他是任何报文在网络上存在的最长时间,超过这个时间报文将被丢弃。 从第三次握手开始分析 第三次握手服务端…...
Android Studio 启用设备远程调试配置完整步聚
启用手机设置->开发者选项-无线调试,然后选择允许 已启用后无线调试变成绿色 ,点击无线调试进入详情页面 点击Android Studio的Device Manager 下的WIFI图标 会弹出下图窗口 打开手机的开发者选项中的WIFI调试(无线调试)下的使用二维码配对设备进行扫描. 设备配对成功后手机…...
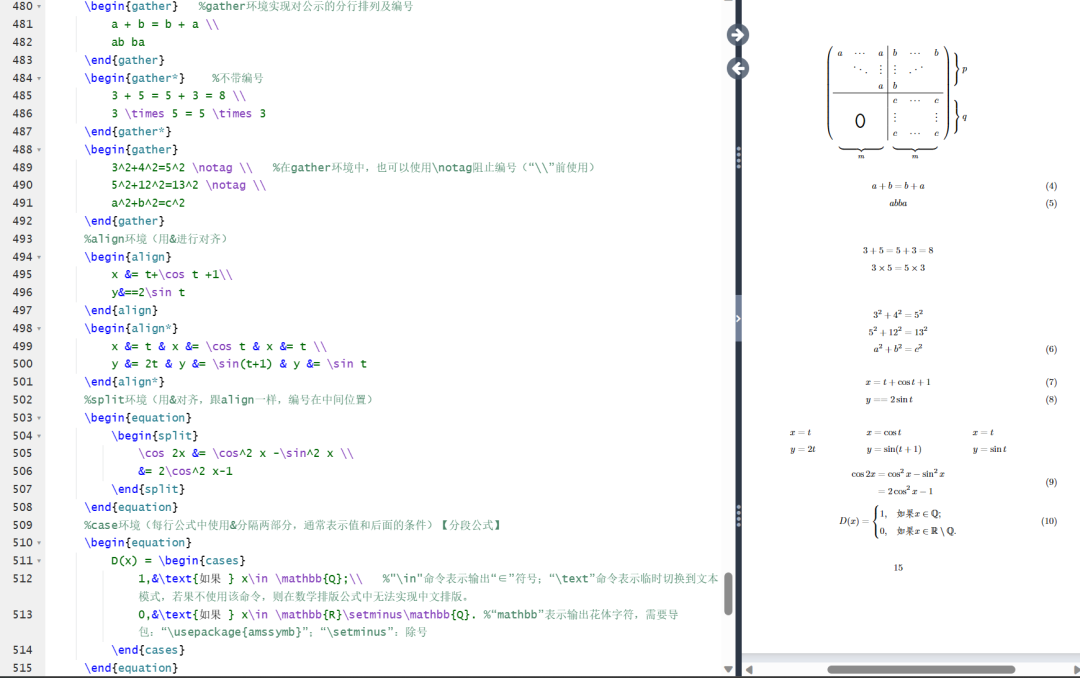
玩转LaTeX(三)【数学公式(基础)、矩阵、多行公式】
数学公式基础 导言区(引包) \usepackage{amsmath} %带星号的eqution 正文区 \begin{document}%数学公式初步 \section{简介} \LaTeX{}将排版内容分为文本模式和数学模式。文本模式用于普通文本排版,数学模式用于数学公式排版。 …...

jenkins 配置git
在linux 中输入 保证git 安装成功 git --version使用查看git 安装目录(非源码安装直接用yum 安装的) which gitjenkins 中到 系统管理–>全局工具配置–> Git installations 新建一个项目 选择自由风格 源码管理选择 git 如果使用的是码云&a…...

单机部署MinIo并设置开机自启
MinIO 是高性能的对象存储,是为海量数据存储、人工智能、大数据分析而设计的,它完全兼容Amazon S3接口,单个对象最大可达5TB,适合存储海量图片、视频、日志文件、备份数据和容器/虚拟机镜像等。MinIO主要采用Golang语言实现&#…...
Latex | 使用MATLAB生成.eps矢量图并导入Latex中的方法
一、问题描述 用Latex时写paper时,要导入MATLAB生成的图进去 二、解决思路 (1)在MATLAB生成图片的窗口中,导出.eps矢量图 (2)把图上传到overleaf的目录 (3)在文中添加相应代码 三…...

宝塔面板定时任务重启各种服务
一个php项目,laravel框架,使用了nginx php redis mysql 还有进程守护supervisor,用于laravel的异步队列进程queue,当服务器重启后有可能部分服务没有成功启动这个时候可以用定时任务去检查服务状态,然后对不正常的自动…...

Ansible playbook编写
目录 palybooks 组成示例:运行palybook定义,引用变量when 条件判断循环Templates模块tags 模块 palybooks 组成 Tasks:任务,即通过 task 调用 ansible 的模板将多个操作组织在一个 playbook 中运行Variables:变量Temp…...
个人博客系统 -- 登录页面添加图片验证码
目录 1. 功能展示 2. 前段代码 3. 后端代码 1. 功能展示 在登录页面添加验证码登录 1. 检测到没有输入验证码或者输入的验证码错误时,进行弹窗提示.并且刷新当前验证码图片 2. 点击验证码进行刷新 2. 前段代码 1. 添加验证码标签,在密码的下面,在login.html进行修改 主要…...
剑指offer10-I.斐波那契数列
学计算机的对这道题肯定不陌生,我记得是学C语言的时候学递归的时候有这道题,于是我就世界用递归写了如下代码: class Solution {public int fib(int n) {if(n1) return 1;if(n0) return 0;return (fib(n-1) fib(n-2)) % 1000000007;} } 到…...
13年测试经验,性能测试-压力测试指标分析总结,看这篇就够了...
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 一般推荐…...

大数据课程D3——hadoop的Source
文章作者邮箱:yugongshiye@sina.cn 地址:广东惠州 ▲ 本章节目的 ⚪ 掌握Source的AVRO Source; ⚪ 掌握Source的Exec Source; ⚪ 掌握Source的Spooling Directory Source; ⚪ 掌握Source的Netcat Source; ⚪ 掌握Source的Sequence Generator Source;…...
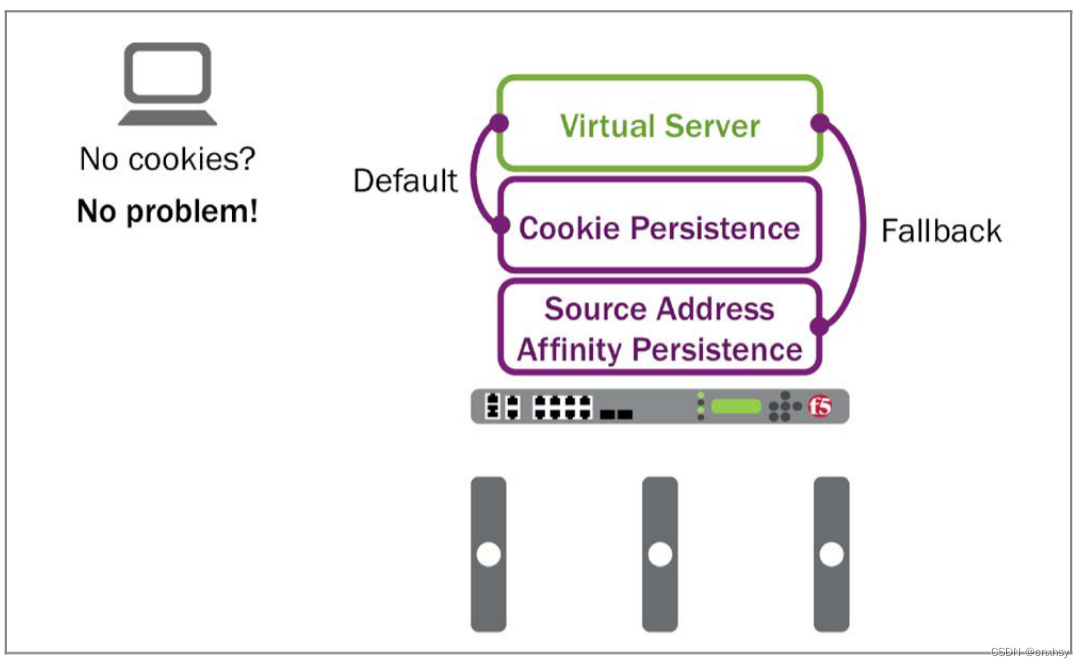
F5 LTM 知识点和实验 4-持久化
第四章:持久化 持久化: 大多数应用都是有状态的,比如,使用一个购物网站,最重要的是用户在放入一个商品之后,刷新网页要能继续看到购物车里的东西,这就需要请求报文发到同一个后端服务器上,持久化就能完成这个功能。 持久化支持一下几种场景: 源地址目标地址SSLSIPH…...

利用最小二乘法找圆心和半径
#include <iostream> #include <vector> #include <cmath> #include <Eigen/Dense> // 需安装Eigen库用于矩阵运算 // 定义点结构 struct Point { double x, y; Point(double x_, double y_) : x(x_), y(y_) {} }; // 最小二乘法求圆心和半径 …...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
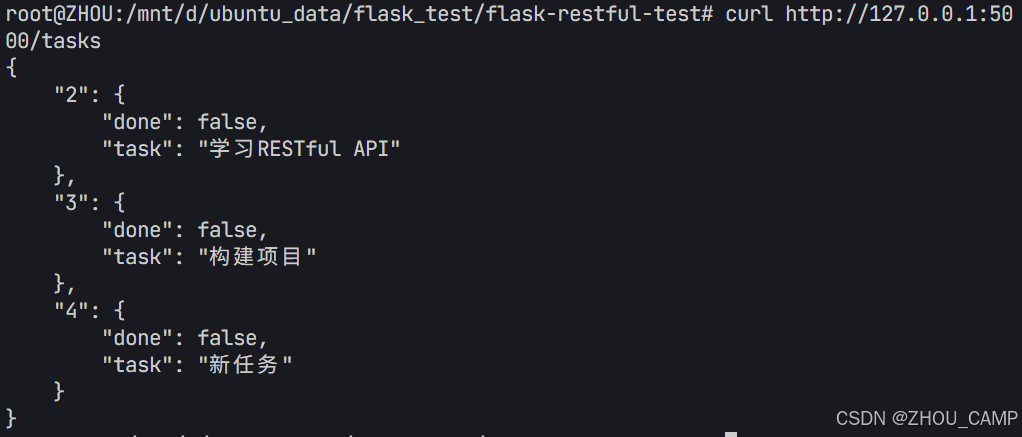
Flask RESTful 示例
目录 1. 环境准备2. 安装依赖3. 修改main.py4. 运行应用5. API使用示例获取所有任务获取单个任务创建新任务更新任务删除任务 中文乱码问题: 下面创建一个简单的Flask RESTful API示例。首先,我们需要创建环境,安装必要的依赖,然后…...

CTF show Web 红包题第六弹
提示 1.不是SQL注入 2.需要找关键源码 思路 进入页面发现是一个登录框,很难让人不联想到SQL注入,但提示都说了不是SQL注入,所以就不往这方面想了 先查看一下网页源码,发现一段JavaScript代码,有一个关键类ctfs…...
:OpenBCI_GUI:从环境搭建到数据可视化(下))
脑机新手指南(八):OpenBCI_GUI:从环境搭建到数据可视化(下)
一、数据处理与分析实战 (一)实时滤波与参数调整 基础滤波操作 60Hz 工频滤波:勾选界面右侧 “60Hz” 复选框,可有效抑制电网干扰(适用于北美地区,欧洲用户可调整为 50Hz)。 平滑处理&…...
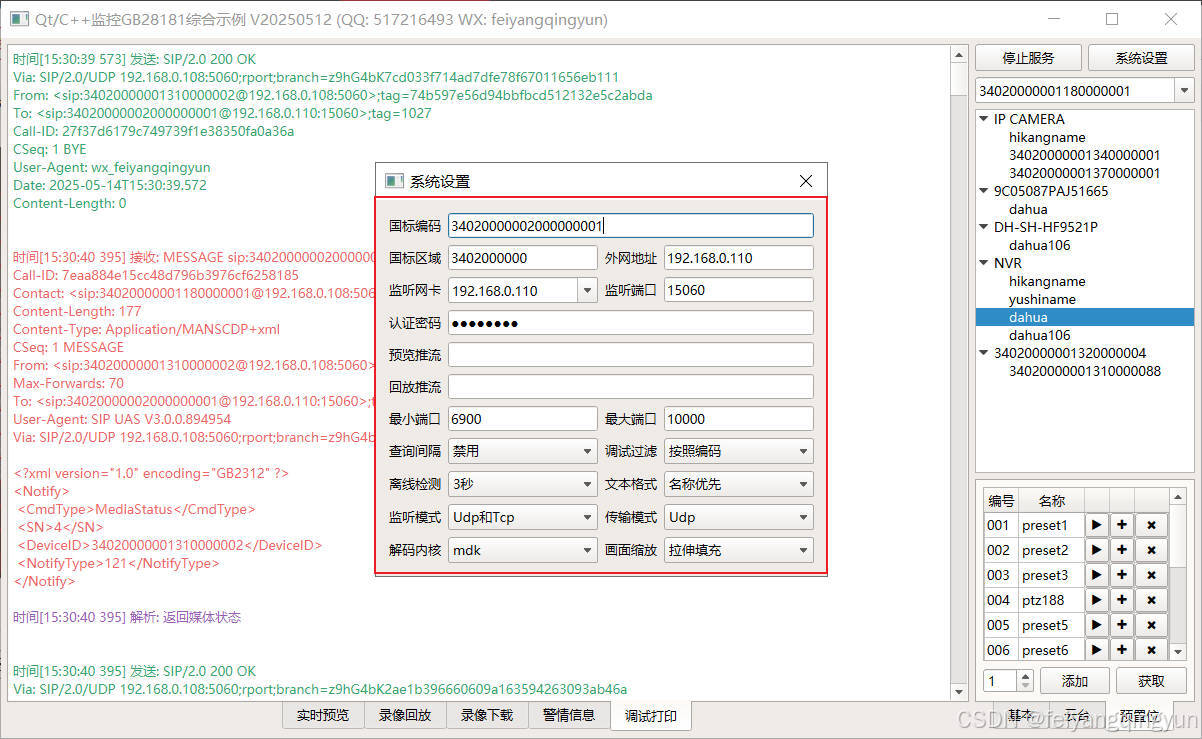
Qt/C++开发监控GB28181系统/取流协议/同时支持udp/tcp被动/tcp主动
一、前言说明 在2011版本的gb28181协议中,拉取视频流只要求udp方式,从2016开始要求新增支持tcp被动和tcp主动两种方式,udp理论上会丢包的,所以实际使用过程可能会出现画面花屏的情况,而tcp肯定不丢包,起码…...

2025年能源电力系统与流体力学国际会议 (EPSFD 2025)
2025年能源电力系统与流体力学国际会议(EPSFD 2025)将于本年度在美丽的杭州盛大召开。作为全球能源、电力系统以及流体力学领域的顶级盛会,EPSFD 2025旨在为来自世界各地的科学家、工程师和研究人员提供一个展示最新研究成果、分享实践经验及…...
【入坑系列】TiDB 强制索引在不同库下不生效问题
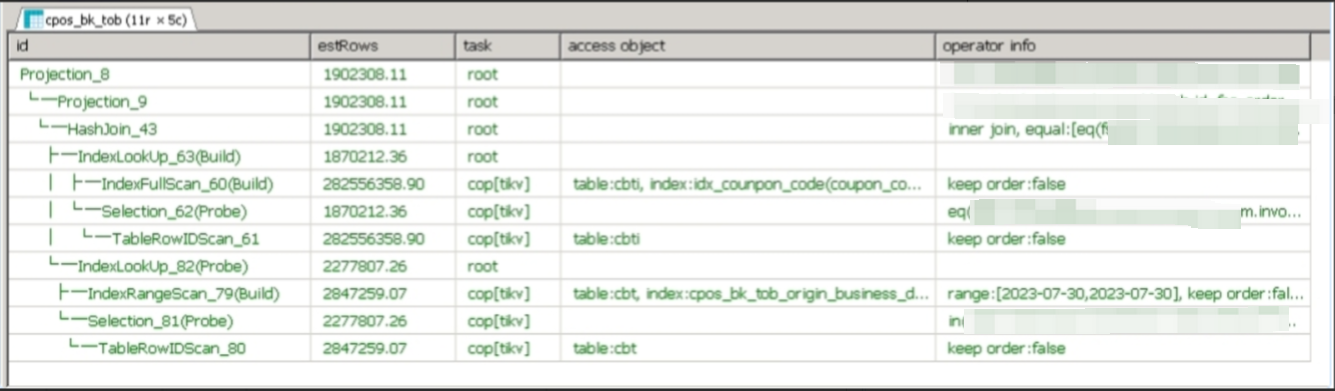
文章目录 背景SQL 优化情况线上SQL运行情况分析怀疑1:执行计划绑定问题?尝试:SHOW WARNINGS 查看警告探索 TiDB 的 USE_INDEX 写法Hint 不生效问题排查解决参考背景 项目中使用 TiDB 数据库,并对 SQL 进行优化了,添加了强制索引。 UAT 环境已经生效,但 PROD 环境强制索…...

系统设计 --- MongoDB亿级数据查询优化策略
系统设计 --- MongoDB亿级数据查询分表策略 背景Solution --- 分表 背景 使用audit log实现Audi Trail功能 Audit Trail范围: 六个月数据量: 每秒5-7条audi log,共计7千万 – 1亿条数据需要实现全文检索按照时间倒序因为license问题,不能使用ELK只能使用…...