算法工程师-机器学习面试题总结(3)
FM模型
FM模型与逻辑回归相比有什么优缺点?
FM(因子分解机)模型和逻辑回归是两种常见的预测建模方法,它们在一些方面有不同的优缺点。
FM模型的优点:
1. 能够捕获特征之间的交互作用:FM模型通过对特征向量的低阶交叉进行建模,能够有效地捕获特征之间的交互作用。这在处理稀疏数据和高维特征空间时特别有用。
2. 可以处理稀疏数据:FM模型能够很好地处理稀疏数据,因为它可以使用低阶交叉来表示特征之间的关联,而不需要显式的特征工程。
3. 参数较少:相对于逻辑回归,FM模型具有较少的参数,这使得训练和推断的效率更高。
4. 预测效果好:因为FM模型能够捕捉特征之间的交互作用,所以在一些特征之间存在非线性关系的任务上,它往往能够取得比逻辑回归更好的预测效果。
FM模型的缺点:
1. 计算成本较高:FM模型的计算复杂度较高,在处理大规模数据集时可能会面临计算资源的限制。
2. 对于高阶交叉的建模能力较弱:FM模型只能对低阶交叉进行建模,对于高阶交叉的处理能力相对较弱。
3. 需要特征工程:FM模型对特征的表示要求较高,需要进行一定程度的特征工程来挖掘特征的交互关系。
逻辑回归的优点:
1. 简单而直观:逻辑回归的原理和模型形式相对简单,易于理解和实现。
2. 计算效率高:逻辑回归的计算复杂度较低,可以很快地进行模型训练和推断。
3. 对于线性关系的建模效果好:对于线性可分的问题,逻辑回归通常能够取得很好的效果。
逻辑回归的缺点:
1. 仅适用于线性关系:逻辑回归假设了特征和标签之间的线性关系,对于非线性问题表现较差。
2. 特征交互的建模能力较弱:逻辑回归无法直接对特征之间的交互进行建模,需要进行特征工程来引入非线性特征。
3. 容易受到异常值和噪声的影响:逻辑回归的训练过程中,异常值和噪声可能会对模型预测产生较大的影响,容易产生偏差。
总的来说,FM模型在能够处理特征交互和稀疏数据方面相对优势明显;而逻辑回归在简单性和计算效率方面更具优势,适用于线性关系较为明显、数据量较小的问题。选择使用哪种模型应根据具体问题的特点和数据的性质来进行综合考量。
为什么FM模型计算复杂度是O(kn)?
FM(Factorization Machines)模型是一种用于解决高维稀疏数据的模型,具有很好的特征组合能力。它可以通过因子化特征之间的交互来捕捉特征之间的高阶关系。
FM模型的计算复杂度为O(kn),其中n表示特征的数量,k表示因子化特征的维度。以下是对这个计算复杂度的解释:
1. 初始化:FM模型需要对每个特征初始化k维的随机因子,这涉及到n * k的计算量,所以初始化的复杂度为O(kn)。
2. 一阶部分(线性项):FM模型的一阶部分是通过对每个特征进行线性组合来建模,并对每个特征维度对应的权重进行更新。由于需要对n个特征进行处理,所以一阶部分的复杂度为O(n)。
3. 二阶部分(交互项):FM模型通过对两两特征进行交互,并把相应的因子乘积相加来建模特征的交互作用。因为有n个特征,所以需要对n个特征对进行计算。对于每个特征对,由于每个因子之间的交互需要进行乘法计算,所以每个特征对的计算复杂度为O(k)。因此,整个二阶部分的复杂度为O(kn)。
综上所述,FM模型的计算复杂度为O(kn),其中初始化部分的复杂度为O(kn),一阶部分的复杂度为O(n),二阶部分的复杂度为O(kn)。相比于一些高阶机器学习模型,FM模型具有较低的计算复杂度,并且适用于处理大规模稀疏数据的场景。
介绍FFM场感知分解机器(Field-aware Factorization Machine),说说与FM异同?
场感知分解机器(Field-aware Factorization Machine,以下简称FFM)是对因子分解机(Factorization Machine,以下简称FM)的改进和扩展。
FM是一种基于线性模型和因子分解的机器学习模型,用于解决稀疏数据和高维特征的问题。它通过对特征间的交互进行建模,可以捕捉到特征之间的非线性关系。
而FFM在FM的基础上,对特征之间的交互进行了更细粒度的建模。在FM中,特征的交互关系只被建模为一种因子,而FFM将每个特征分成不同的场(Field),并为每个场组合不同特征之间的因子。这样做的好处是能够更好地建模特征之间的非对称关系,提升模型的表达能力。
与FM相比,FFM具有以下几点不同:
1. FFM引入了场的概念,可以对不同的特征组合建模,从而考虑了更多特征之间的关系。
2. FFM的参数量更大,因为需要为每个场的特征组合学习不同的因子,相对而言模型更复杂。
3. FFM对稀疏特征的处理更加灵活,可以更好地应对高维稀疏数据。
总的来说,FFM相比于FM在建模能力上更强,可以更好地处理特征之间的关系,特别适用于稀疏高维数据的建模任务。但是由于模型复杂度提高,训练和推理的计算成本也会增加。
使用FM进行模型训练时候,有哪些核心参数对模型效果影响大?
在使用FM进行模型训练时,以下是一些核心参数对模型效果影响较大的建议:
1. 因子数(k值):因子数决定了模型的复杂度和记忆能力。较大的因子数可以提高模型的准确性,但也会增加计算和内存开销。一般来说,可以从8-200之间尝试不同的因子数。
2. 学习率(learning rate):学习率决定了参数更新的步长。较小的学习率可以增加模型稳定性,但训练速度可能较慢;较大的学习率可以提高训练速度,但可能导致模型不稳定。通常可以从0.001-0.1之间尝试不同的学习率。
3. 正则化参数(lambda):正则化参数用于控制模型的过拟合情况。较大的正则化参数可以减少过拟合,但可能会降低模型表现。一般来说,可以从0.001-0.1之间尝试不同的正则化参数。
4. 迭代次数(epochs):迭代次数决定了模型训练的轮数。较大的迭代次数可以增加模型的准确性,但也会增加训练时间。一般可以从10-100之间尝试不同的迭代次数。
除了上述核心参数,还有其他一些与数据集和任务相关的参数,如特征维度、batch size等,也可能对模型性能产生影响。在实际应用中,需要根据具体情况进行调整和优化。
如何从神经网络的视角看待FM模型?
神经网络是一种模拟人脑神经系统的计算模型,可以通过大量神经元之间的连接和信息传递来解决各种问题。与传统的机器学习模型相比,神经网络具有更强大的表达能力和学习能力。
FM模型(Factorization Machines)是一种用于处理高维稀疏数据的机器学习模型,可以用于推荐系统、广告点击率预测等任务。FM模型通过特征矩阵的低阶交互项来建模特征之间的关系,进而预测目标变量。
从神经网络的视角来看,FM模型可以看作是一个特殊的神经网络结构。在FM模型中,特征之间的交互项可以看作是神经元之间的连接权重。FM模型通过学习这些权重来捕捉特征之间的关系,并进行预测。
与传统的神经网络不同,FM模型的参数只与特征之间的交互项有关,而与特征的维度无关。这一点使得FM模型在处理高维稀疏数据时具有一定的优势。
虽然FM模型和神经网络在机器学习中属于两种不同的算法模型,但可以从神经网络的视角来理解FM模型的原理和工作方式。这种视角可以帮助我们更好地理解FM模型,并在实践中更好地应用和扩展。
决策树
决策树的建树过程是怎样的?
决策树的建树过程可以分为两个主要步骤:特征选择和树的生成。
1. 特征选择:
在决策树的建树过程中,选择最佳的特征来划分数据集是非常重要的。常用的特征选择方法有信息增益(Information Gain)、增益率(Gain Ratio)、基尼系数(Gini Index)等。这些方法都是通过计算特征的不纯度或分裂后的增益来评估特征的重要性。选择具有最大增益或最小不纯度的特征作为划分标准。
2. 树的生成:
树的生成是一个递归的过程。通过选定的划分特征,将当前节点的数据集划分成更小的子集。对每个子集,重复上述步骤,继续选择最佳的特征并划分数据,直到满足某个终止条件,例如数据集已完全划分,或数据集中的样本属于同一类别。在每个节点上,根据划分后的子集创建一个子节点,并将数据集分配给该子节点。
你是如何理解熵?从数学原理上解释熵公式可以作为信息不确定性的度量?
熵是信息理论中经常使用的一个概念,用来衡量一个随机事件发生时所包含的信息量或不确定性。从数学原理上解释,熵公式可以作为信息不确定性的度量的一个方式。
熵的数学定义如下:
H(X) = -∑ P(x) log2 P(x)
其中,H(X) 表示随机变量 X 的熵,P(x) 表示事件 x 发生的概率。熵公式中的对数可以看作是对信息量的平均编码长度的衡量,而概率 P(x) 则是每个事件发生的概率。
如果一个随机事件 X 的熵较大,意味着其中包含较多的不确定性,即事件 X 的结果很难预测,需要更多的信息来确定结果。相反,如果熵较小,意味着事件 X 的结果比较确定,需要的信息量较少。
举个简单的例子,假设有两个骰子,一个是均匀骰子,另一个是不均匀骰子,不均匀骰子更有可能掷出1。对于均匀骰子,每个面的概率都是1/6,而对于不均匀骰子,掷出1的概率可能会更高。在这种情况下,均匀骰子的熵较高,因为结果更难预测,而不均匀骰子的熵较低,因为结果更容易预测。
因此,熵公式可以被解释为衡量一个随机事件的不确定性程度,熵值越大,则不确定性越高。而通过对事件发生概率的求对数,可以将信息量的度量转化为熵的形式,从而方便计算和比较不同随机事件的不确定性。
联合熵、条件熵、KL散度、信息增益、信息增益比、gini系数都是什么?各有什么优缺点?
1. 联合熵(Joint Entropy):联合熵是指多个随机变量的熵的总和。它用于衡量多个随机变量的联合不确定性。联合熵的计算方法类似于单个随机变量的熵的计算,只是将概率转化为联合概率。
2. 条件熵(Conditional Entropy):条件熵是指给定一个随机变量的条件下,另一个随机变量的熵。它用于衡量在已知某些信息的情况下,另一个随机变量的不确定性。条件熵的计算方法是将联合概率除以给定的条件概率。
3. KL散度(Kullback-Leibler Divergence):KL散度是用于衡量两个概率分布之间的差异。它衡量当用一个概率分布来拟合另一个分布时所需的额外平均编码位数。KL散度的计算方法是对两个概率分布的每个事件进行求和,乘以其概率之差的对数。
4. 信息增益(Information Gain):信息增益是在决策树算法中使用的概念,用于衡量一个特征对于分类结果的影响程度。它是指在已知一个特征的情况下,通过该特征能够减少的熵的量。信息增益的计算方法是用类别的熵减去给定特征的条件熵。
5. 信息增益比(Information Gain Ratio):信息增益比是信息增益的一种改进版本,用于解决信息增益偏向取值较多的特征的问题。它是信息增益除以该特征本身的熵,可以对特征取值较多的情况进行惩罚。选取划分属性时,优先选择信息增益比较大的特征。
6. Gini系数:Gini系数常用于决策树算法中的特征选择,用于衡量一个特征的纯度或分类的不确定性。Gini系数的计算方法是对每个类别的概率的平方进行求和,然后用1减去这个和。
各个概念的优缺点如下:
- 联合熵和条件熵可以提供关于随机变量之间关系的信息,但计算开销较大。
- KL散度可以衡量两个分布之间的差异,但不具备对称性。
- 信息增益可以衡量一个特征对分类结果的影响,但对取值较多的特征有偏好。
- 信息增益比可以解决信息增益对取值较多的特征的偏好问题。
- Gini系数可以衡量特征的纯度,但没有给出具体的概率值。
ID3、C4.5、CART有啥异同?
ID3(Iterative Dichotomiser 3)是最早的决策树算法之一,由Ross Quinlan在1986年提出。它使用信息增益(Information Gain)作为特征选择的准则,根据特征的信息增益来划分数据,目标是构建出信息增益最大的决策树。ID3只能处理离散特征,对于连续特征需要进行离散化处理。
C4.5是ID3的改进版本,由Ross Quinlan在1993年提出。C4.5与ID3的最大差别在于特征选择的准则。C4.5使用的准则是信息增益比(Gain Ratio),通过对信息增益进行归一化来解决特征取值较多时的偏好问题。此外,C4.5可以处理连续特征,对于连续特征会先进行离散化处理。
CART(Classification and Regression Trees)是由Breiman等人在1984年提出的决策树算法。与ID3和C4.5不同,CART可以同时处理分类和回归问题。在分类问题中,CART使用基尼系数(Gini Index)作为特征选择的准则,目标是构建出基尼系数最小的决策树。在回归问题中,CART使用平方误差最小化作为特征选择的准则,目标是构建出平方误差最小的决策树。CART也可以处理连续特征,通过尝试所有可能的划分点选择最优划分。
总结来说,ID3、C4.5和CART都是决策树算法,但它们在特征选择的准则、处理连续特征的能力以及回归问题的处理上有一些异同。选择使用哪个算法取决于具体问题和数据的特点。
决策树如何防止过拟合?前剪枝和后剪枝过程是怎样的?剪枝条件都是什么
决策树可以通过剪枝(pruning)来防止过拟合,减少模型在训练数据上的错误率。
前剪枝(Pre-Pruning)是指在构建决策树的过程中,在判断是否继续分裂某个节点之前,先进行一定的判断和限制,以防止过度拟合。前剪枝的剪枝条件通常包括以下几个:
1. 最大深度限制:限制决策树的最大深度,避免过于复杂的树结构。
2. 叶子节点样本数限制:限制叶子节点上的样本数,如果样本数低于设定值,停止分裂。
3. 不纯度下降限制:限制节点划分后的不纯度下降值,如果下降值低于设定阈值,停止分裂。
后剪枝(Post-Pruning)是指先构造一棵完整的决策树,然后通过剪枝来进行模型的简化。后剪枝的剪枝条件通常使用基于验证集的损失函数进行评估,主要包括以下两个步骤:
1. 自底向上剪枝:从决策树的叶子节点开始剪枝,逐步将叶子节点替换成单一的类别或者将叶子节点合并为一个共同的父节点。剪枝过程中需要计算剪枝后的决策树在验证集上的性能表现,如果剪枝后性能没有显著下降,就保留剪枝后的树。
2. 剪枝终止条件:剪枝过程可以通过交叉验证确定终止条件。通常会将数据集划分为训练集和验证集,在验证集上评估剪枝后的模型性能,如果性能没有显著提升,就停止剪枝。
需要注意的是,剪枝过程中选择合适的条件和合理的剪枝策略是很重要的,以确保决策树能够在保持准确性的同时减少过拟合。
随机森林(RF)
介绍RF原理和思想
RF(Random Forest)是一种集成学习(Ensemble Learning)方法,由多个决策树构成的分类器或回归器组成。它的原理和思想主要涉及以下几个方面:
1. 随机抽样:RF使用自助采样法(Bootstrap Sampling)从原始数据集中有放回地随机抽取样本,生成不同的训练子集,用于训练每棵决策树。这样可以使得每棵树都有略微不同的训练数据,增加模型的多样性。
2. 随机特征选择:在训练每棵决策树的过程中,并不是使用全部的特征进行划分,而是随机选择一部分特征。这样可以避免某些特征在所有树中都起到主导作用,增加模型的多样性和稳定性。
3. 决策树集成:RF中的每棵决策树都是基于不同的训练子集和随机特征选择生成的。通过集成所有的决策树,RF能够将每棵树的预测结果结合起来,从而得到更准确、鲁棒性更强的预测。
4. 投票表决:在RF中,当进行分类任务时,将每棵决策树的分类结果进行投票表决,选择获得最多投票的类别作为最终的分类结果。对于回归任务,将每棵决策树的预测结果取平均值作为最终的回归结果。
RF的优点包括:
- 对于大规模数据集和高维特征,RF能够有效处理。
- RF能够自动处理缺失值和异常值。
- RF不容易过拟合,模型具有较好的泛化能力。
- RF可以提供特征的重要性评估,可以用于特征选择。
需要注意的是,RF的训练过程可能比较耗时,由于生成了多个决策树,模型的存储空间较大。此外,RF对于噪声较大的数据,可能会导致模型的性能下降。因此,在使用RF时需要注意参数的选择和调优。
RF是如何处理缺失值?
在随机森林(RF)中,处理缺失值的方法主要有以下两种:
1. 不处理缺失值:RF可以直接处理包含缺失值的数据。在构建每棵决策树时,当需要根据某个特征进行划分时,如果该样本在该特征上有缺失值,RF会将该样本同时考虑在左子树和右子树中,保持了样本在划分过程中的信息。这种方式有助于保持模型的鲁棒性,但可能会引入偏差。
2. 使用其他特征进行推断填充:另一种处理缺失值的方式是使用其他特征值对缺失值进行推断填充。在训练阶段,可以使用其他特征的平均值、中位数、众数等统计量或一些更复杂的算法来填充缺失值。在预测阶段,也可以使用相同的方法来填充缺失值。这种方式可以减少缺失值对模型的影响,但可能会引入噪声。
值得注意的是,选择哪种方法处理缺失值应根据具体情况进行权衡。如果数据中缺失值的比例较高,并且缺失值本身可能包含有信息,那么不处理缺失值可能是更好的选择。如果缺失值的比例较低,处理缺失值可能有助于提高模型的性能。此外,对于某些特定问题,也可以根据领域知识或专家经验来选择最适合的处理方法。
RF如何衡量特征重要度?
在随机森林(RF)中,特征重要度是衡量每个特征对模型性能的贡献程度的一种指标。常用的衡量特征重要度的方法有两种:
1. 基尼重要度(Gini Importance):基尼重要度是通过计算每个特征在每个决策树中的相对重要性,并求平均值来得到的。在每棵决策树的划分过程中,特征的基尼指数(Gini Index)用于衡量不确定性的减少程度。基尼重要度是根据特征在所有决策树中使用的次数以及特征的划分准则的基尼指数来计算的。特征使用次数越多,并且每次划分能够显著地减少不确定性,那么该特征的基尼重要度就越高。
2. 平均不纯度减少(Mean Decrease Impurity):平均不纯度减少是通过计算每个特征在每个决策树中划分所带来的平均不纯度减少量来得到的。在每棵决策树的划分过程中,特征的划分准则(如基尼指数或信息增益)会减少数据的不纯度。平均不纯度减少衡量的是在所有决策树中,每个特征的划分对不纯度的平均减少程度。特征的平均不纯度减少越高,说明该特征对于划分数据的重要性越大。
这两种方法都是基于决策树的特性来衡量特征的重要度。使用这些方法可以为特征提供一个相对的重要度排序,进而帮助我们了解哪些特征对于模型的预测能力更为关键。需要注意的是,由于RF是一种集成方法,特征重要度的计算相对准确,但在某些情况下也可能受到数据的噪声或决策树数量的影响。因此,在使用特征重要度进行特征选择时,需要综合考虑其他因素,如数据质量和特征的实际意义。
RF“随机”主要体现在哪里?
1. 随机抽样(Bootstrap Sampling):RF使用自助采样法,从原始数据集中有放回地随机抽取样本,生成不同的训练子集。这意味着每个训练子集都是基于原始数据集的随机采样得到的,样本的选择是随机的。这样可以增加模型的多样性,减少过拟合的风险。
2. 随机特征选择:在训练每棵决策树的过程中,并不是使用全部的特征进行划分,而是随机选择一部分特征。具体来说,每次分裂节点时,RF会从所有特征中随机选择一定数量的特征进行评估,并选择其中最佳的特征来进行划分。这样可以避免某些特征在所有树中都起到主导作用,增加模型的多样性和稳定性。
3. 随机森林中决策树的生成过程:每棵决策树的生成过程都是在随机性的基础上进行的。通过随机抽样和随机特征选择,使得每棵决策树都有略微不同的训练数据和特征,即每棵决策树是在随机化的条件下生成的。这样可以使得每棵树都有不同的观察角度和随机误差,最终通过集成来得到更准确、鲁棒性更强的预测。
"随机"在随机森林中的使用是为了增加模型的多样性,提高模型的泛化能力,减少过拟合的风险,并且使得模型能够适应各种不同的数据分布和特征组合。
RF有哪些优点和局限性?
RF(Random Forest)具有如下优点:
1. 高准确性:RF通过集成多棵决策树的结果,可以获得更准确、稳定的预测结果。相比于单棵决策树,RF可以减少过拟合问题,提高模型的泛化能力。
2. 鲁棒性:RF对于噪声数据和缺失值具有较好的鲁棒性。在构建每棵决策树时,RF通过随机抽样和随机特征选择,能够有效降低特定样本或特征对模型的影响。
3. 可解释性:RF能够提供特征的重要性评估,通过衡量每个特征在决策树中的使用频率和划分的质量,可以得到特征在模型中的相对重要性。这对于特征选择、特征工程和模型理解等方面有很大帮助。
4. 处理高维数据和大规模数据:RF对于高维特征和大规模数据集具有较好的适应性。在构建每棵决策树时,RF可通过随机特征选择和随机抽样的方式,减轻了对计算资源的要求。
然而,RF也存在一些局限性:
1. 训练时间和存储空间:由于RF需要构建多棵决策树,并且每棵树的训练都相对独立,因此训练时间相对较长。此外,RF需要存储每棵决策树的信息,导致模型的存储空间较大。
2. 参数调整:RF中的一些参数需要进行调优,如决策树的数量、最大树深度和随机特征选择的数量等。不同的数据集和问题可能需要不同的参数设置,需要一定的经验和实践。
3. 对噪声数据的敏感性:虽然RF对于噪声数据具有一定的鲁棒性,但对于噪声比较大的数据,可能会导致模型性能下降。
4. 随机性带来的不确定性:RF中的随机性因素,如随机抽样和随机特征选择,使得模型的结果具有一定的不确定性。这对于模型的解释和可重复性可能带来一些挑战。
为什么多个弱分类器组合效果会比单个要好?如何组合弱分类器可以获得更好的结果?原因是什么?
主要原因是因为集成学习可以通过对多个分类器的综合意见来减少分类误差。每个弱分类器可能只能对某些样本做出正确的预测,但是通过组合多个弱分类器,可以综合他们的决策,从而提高整体的分类性能。同时,集成学习还可以通过对不同的弱分类器进行权重分配,以提高最终的分类性能。此外,集成学习还可以通过引入随机性来增强分类器的多样性,从而进一步提高整体的分类性能。因此,多个弱分类器的组合可以利用集体的智慧和多样性,进一步提高分类的准确性。
在集成学习中,可以使用多种方法来组合弱分类器以获得更好的结果。以下是常见的几种方法:
1. 投票法(Voting):对于分类问题,可以让弱分类器进行投票,最后选择得票最多的类别作为最终的预测结果。这种方法适用于多数表决可靠的场景。
2. 加权投票法(Weighted Voting):为每个弱分类器分配一个权重,根据其预测结果的可信度进行投票。权重可以根据弱分类器的准确性来确定,准确性较高的分类器可以被赋予更高的权重。
3. 平均法(Averaging):对于回归问题,可以将多个弱分类器的预测结果取平均作为最终的预测结果。这种方法可以减少预测的方差,提高整体的稳定性。
4. 堆叠法(Stacking):将多个弱分类器的预测结果作为输入,训练一个元分类器来得到最终的预测结果。元分类器可以是其他机器学习算法,如逻辑回归、支持向量机等。堆叠法可以利用不同弱分类器的优点,进一步提高整体的分类性能。
以上方法的原理是利用多个弱分类器的决策来减少分类误差,通过集体的智慧和多样性来获得更好的结果。不同的方法适用于不同的情况和问题,选择合适的组合方法可以根据具体的学习任务和数据特征进行调整。
Bagging的思想是什么?它是降低偏差还是方差,为什么?
Bagging是Bootstrap Aggregating的缩写,它的思想是通过对训练集进行有放回的采样,产生多个子样本,然后分别用这些子样本训练多个独立的分类器,最终通过对这些分类器的结果进行投票或平均,得到最终的预测结果。
Bagging主要是用来降低方差,而不是偏差。通过对训练集的重采样,每个子样本中都可能包含噪声或偏差数据,但同时也能包含有用的信息。当我们训练多个分类器时,每个分类器会在不同的数据子集上进行学习,因此它们会产生不同的错误和偏差。通过对分类器的结果进行集成,我们可以降低整体预测的方差,并提高系统的稳定性和准确性。
可否将RF的基分类模型由决策树改成线性模型或者knn?为什么?
在随机森林中,基分类模型往往被选择为决策树,而不是线性模型或KNN。这是因为随机森林的基本思想是通过集成多个弱学习器来构建一个强大的分类器或回归模型。而决策树作为基分类模型具有以下几个优势:
1. 非线性关系捕捉:决策树能够对非线性关系进行建模,并且不需要任何线性假设。线性模型或KNN则对数据的结构做出了线性或近邻假设,无法捕捉复杂的非线性关系。
2. 高鲁棒性:决策树对于异常值和噪声具有较强的鲁棒性。线性模型对异常值较为敏感,而KNN会受到噪声的影响。
3. 特征重要性评估:决策树可以通过分裂节点时的特征重要性评估,帮助我们了解哪些特征对于分类的贡献最大。线性模型或KNN难以提供这种特征重要性的信息。
4. 计算效率:决策树的构建过程较为高效,不需要计算复杂的内积或距离计算,而线性模型和KNN在计算预测时会更加耗时。
然而,理论上我们可以将其他基分类模型应用于随机森林,如线性模型或KNN。但是,在实践中,决策树作为基模型在随机森林中表现良好,并且能够很好地平衡模型的复杂度和预测能力。因此,决策树是RF的首选基分类模型。
GBDT
梯度提升和梯度下降有什么区别和联系?
梯度提升(Gradient Boosting)和梯度下降(Gradient Descent)是两种不同的机器学习算法,它们在概念上有一些相似之处,但在实际应用中有一些显著的区别。
区别:
1. 目标函数:梯度提升是一种迭代算法,目标是通过每次迭代来最小化损失函数,以逐步改进模型的预测能力。梯度下降是一种优化算法,目标是通过迭代来找到能够最小化目标函数的参数值。
2. 更新方式:梯度提升通过拟合一个新的模型来减少先前模型的残差,每个新模型都会在之前模型的基础上进行更新。梯度下降通过沿着目标函数的负梯度方向更新参数,逐渐接近最优解。
3. 模型类型:梯度提升通常以决策树作为基本学习器,通过串行地添加弱学习者来构建强大的集成模型。梯度下降可以用于训练各种类型的模型,如线性回归、逻辑回归等。
联系:
1. 都利用了梯度信息:梯度提升和梯度下降都利用了目标函数的梯度信息来指导模型的调整和优化。
2. 都可以用于回归和分类问题:梯度提升和梯度下降都可以应用于回归和分类问题,并在许多实际应用中获得良好的结果。
总的来说,梯度提升和梯度下降是两种不同的算法,其目标和方法有所不同。梯度提升是一种集成学习算法,通过逐步改进模型的预测能力来减少损失函数,而梯度下降是一种优化算法,通过迭代更新参数来寻找最优解。
如何理解Boosting和Bagging?他们有什么异同?
Boosting和Bagging都是集成学习中的常用方法,它们都是通过组合多个基分类器来提高整体分类性能。
1. Bagging:Bagging是通过对训练集进行有放回的重采样,产生多个子样本,然后分别用这些子样本训练多个独立的分类器,再通过投票或平均的方式来得到最终的预测结果。Bagging的基分类器之间是相互独立的。常见的Bagging算法有随机森林(Random Forest)。
2. Boosting:Boosting是通过串行训练多个分类器,每个分类器都会根据前一个分类器的错误情况对样本进行加权,使得后一个分类器更关注之前分类错误的样本,从而提高分类性能。Boosting的基分类器是通过迭代训练得到的,每个基分类器都会在前一个基分类器的基础上进行学习。常见的Boosting算法有Adaboost和Gradient Boosting。
异同点:
- 相同点:Bagging和Boosting都是通过集成多个基分类器来提高整体性能。它们都可以用于分类和回归任务。
- 不同点:Bagging的基分类器是独立并行的,每个基分类器之间没有关联;而Boosting的基分类器是串行训练的,每个基分类器都会根据前一个分类器的性能进行学习。在Bagging中,每个分类器具有相等的权重;而在Boosting中,每个分类器的权重是根据其性能来动态调整的。
总体上讲,Boosting更加关注错误样本,通过迭代的方式不断提高分类性能;而Bagging通过多个独立的分类器进行集成,降低预测的方差,提高整体的稳定性。
讲解GBDT的训练过程?
GBDT,即梯度提升树(Gradient Boosting Decision Tree),是一种基于决策树的梯度提升算法。下面是GBDT的训练过程:
1. 初始化模型:将目标值的平均值作为初始预测值(初始残差)。
2. 对于每一轮迭代:
a. 计算负梯度:根据当前模型的预测结果,计算目标值和当前预测值之间的负梯度(残差)。
b. 构建回归树:使用负梯度作为目标值,使用决策树算法构建一棵回归树。这里的决策树是用于拟合当前负梯度的残差。
c. 更新模型:将新构建的回归树以一定的步长(学习率)加入到当前模型中,更新预测值。
3. 得到最终的模型:重复迭代上述步骤,直到达到指定的迭代次数或满足某个停止条件。
在GBDT的训练过程中,每一轮迭代都会构建一棵新的回归树,并更新模型。通过迭代地拟合负梯度的残差,每棵回归树都在尝试修正前一棵树的残差预测结果,使得模型的预测能力逐步提升。
最终,GBDT会将各个回归树的预测结果进行累加,得到最终的预测值。由于每一棵树都在修正之前树的残差,GBDT具有逐步逼近目标值的能力,可以在迭代的过程中不断减小训练集的损失函数,从而提高整个模型的预测性能。
你觉得GBDT训练过程中哪些环节可以改进以提升训练效率?
在GBDT的训练过程中,有几个环节可以改进以提升训练效率:
1. 采样策略:可以考虑对训练集进行采样,使得每轮迭代训练的样本数量减少,从而加快训练速度。可以使用基于梯度的采样策略,使得那些梯度大的样本更有可能被选中,从而保证模型对难样本的拟合能力。
2. 提前停止:可以设置一定的停止条件,如达到一定的迭代次数或目标损失函数的收敛值,来提前停止训练过程。这样可以防止过拟合,并减少训练时间。
3. 学习率调整:可以对学习率进行动态调整。可以使用学习率衰减策略,即在训练的早期使用较大的学习率来快速逼近目标值,随着迭代次数的增加逐渐减小学习率,使得模型能够更加精细地学习。
4. 并行计算:可以通过并行计算来加快训练速度。GBDT可以并行计算每棵树的构建过程,因为每棵树的构建是独立的,不需要依赖上一棵树的结果。可以使用多线程或分布式计算来加速模型训练。
5. 特征选择:可以通过特征选择的方法减少输入特征的数量,从而减小训练时间。可以使用特征重要性评估指标,如基于信息增益或基于模型权重的方法来选择最具有代表性的特征。
GBDT的优点和局限性有哪些?
GBDT(Gradient Boosting Decision Trees)是一种集成学习方法,它通过串行训练弱分类器来构建一个强分类器。下面是GBDT的一些优缺点:
优点:
1. 高准确率:GBDT在处理分类和回归问题时通常能够取得很高的预测准确率。
2. 可处理多种类型的数据:GBDT可以处理连续型特征和离散型特征,并且对异常值和缺失值有一定的鲁棒性。
3. 特征选择:GBDT能够自动选择重要的特征,从而减少特征工程的工作量。
4. 自适应性:GBDT可以适应各种复杂的数据情况,并且能够处理非线性关系。
5. 可解释性:由于GBDT是通过构建一系列的决策树来进行预测,因此可以很好地解释模型的预测过程。
缺点:
1. 训练时间较长:由于GBDT是串行训练的,每一轮迭代都需要优化损失函数,因此训练时间相对较长。
2. 容易过拟合:如果数据集噪声较大或样本数量较少,GBDT容易过拟合。
3. 参数调节较多:GBDT中有许多参数需要调节,不合理的参数选择可能导致模型性能下降。
总体来说,GBDT是一种强大的机器学习方法,适用于许多实际问题。然而,使用GBDT时需要注意参数调节和过拟合问题。
如何防止GBDT过拟合?
有几种方法可以帮助防止GBDT过拟合:
1. 调整树的参数:通过限制每棵树的深度、叶子节点的最小样本数或者最大叶子节点数,可以限制模型的复杂度,防止过拟合。可以通过交叉验证等方法来找到合适的参数取值。
2. 提前停止训练:可以设定一个阈值或者迭代次数,当模型达到一定阈值或者迭代次数时停止训练,防止过拟合。可以使用早停策略,即在训练过程中监控验证集的性能,当性能不再提升时停止训练。
3. 正则化:通过添加正则化项来限制模型的复杂度,例如使用L1或者L2正则化。正则化可以惩罚模型中的复杂性,促使模型更加简单、泛化能力更强。
4. 增加训练样本数:过拟合往往是由于样本量不足导致的,增加样本数可以帮助模型更好地学习数据的特征,减少过拟合的风险。
GBDT是否对异常值敏感,为什么?
GBDT(Gradient Boosting Decision Trees)对异常值是敏感的。这是因为GBDT是通过逐步构建决策树来进行梯度下降的,每一棵树都是基于前一棵树的残差来拟合新的残差。如果数据中存在异常值,它们可能导致某个特定的决策树过于偏向异常值,从而影响整个模型的性能。因此,在使用GBDT模型时,我们需要对异常值进行处理,可以通过标准化、剔除或者替换异常值等方法来减少其对模型的影响。
在训练GBDT过程中哪些参数对模型效果影响比较大?这些参数造成影响是什么?
在训练GBDT模型时,以下几个参数对模型效果影响比较大:
1. 树的数量(n_estimators):树的数量表示迭代的次数,较多的树可以使模型更加拟合训练数据,但也有可能导致过拟合。
2. 树的深度(max_depth):树的深度控制了模型的复杂度,较深的树可以更好地拟合训练数据,但也可能导致过拟合。
3. 学习率(learning_rate):学习率决定了每棵树对最终结果的贡献程度,较小的学习率需要更多的树来达到相同的效果,较大的学习率可能导致模型不稳定。
4. 列采样比例(colsample_bytree):控制每棵树使用的特征的比例,较小的值可以降低过拟合的风险。
这些参数的调整可以对模型的效果产生不同的影响:
- 树的数量:较多的树可以提升模型的拟合能力,但也可能导致过拟合,并增加模型的计算时间。
- 树的深度:较深的树可以更好地拟合训练数据,但也可能导致过拟合,且增加模型的计算时间。
- 学习率:较小的学习率需要更多的树来达到相同的效果,较大的学习率可能导致模型不稳定,需要适当的调整。
- 列采样比例:控制特征的随机选取比例,较小的值可以降低过拟合的风险,但也可能降低模型的表达能力。
因此,在训练GBDT模型时,这些参数的选择需要综合考虑模型的拟合能力、泛化能力和计算时间等方面的因素,可以通过交叉验证等方法来寻找最佳的参数组合。
Xgboost
Xgboost和GBDT有什么异同?优点是什么?
相同之处:
1. 都属于集成学习算法的一种,通过组合多个弱分类器以获得更强大的分类器。
2. 都是基于决策树的算法,即通过构建多个决策树来完成任务。
3. 都是使用梯度提升(Gradient Boosting)的方式来训练模型。
不同之处:
1. xgboost是GBDT的一种优化实现,通过引入正则化项、并行化等技术加快了训练速度,并提供更好的性能表现。
2. xgboost在损失函数中加入了正则化项,以防止过拟合,并允许用户自定义用于训练的目标函数。
3. xgboost支持多种分裂准则(如基尼系数、信息增益等),而GBDT一般使用的是基尼系数。
4. xgboost可以自动处理缺失值,在构建决策树时会选择最优的分支方向。
5. xgboost能够进行并行计算,提高了训练速度。GBDT通常是串行计算的。
优点:
1. xgboost具有较高的准确性和泛化能力,通常获得较好的预测结果。
2. xgboost能够处理大规模的数据集和高维特征。
3. xgboost具有良好的可解释性,可以输出特征的重要性得分。
总之,xgboost在性能和效果上相对于传统的GBDT有一定的优势,特别适用于大规模数据集和高维特征的场景。
为什么xgboost训练会那么快,主要优化点是什么?
xgboost训练快的主要优化点有以下几个:
1. 数据压缩:xgboost使用了一种稀疏数据结构来存储和处理数据,减少了内存占用和硬盘IO。
2. 并行处理:xgboost使用多线程和分布式计算来实现并行处理,加快了模型训练速度。
3. 列块存储:xgboost将数据矩阵按列分块存储,同时在内存中保存了列索引,可以更快地进行特征选择和分割。
4. 优化的算法:xgboost使用了一些优化的算法,如特征子采样、并行排序和直方图近似等,提高了训练速度。
5. 提前停止:xgboost在每一轮迭代时都会计算验证集上的性能指标,并根据指标的变化情况来提前停止训练,避免过拟合。
这些优化点的综合应用使得xgboost在训练速度上有很大的提升。
xgboost是如何处理缺失值的?
xgboost对于缺失值有内置的处理方式,即自动将缺失值视为一种特殊的取值。
在xgboost中,当处理训练数据时,它会将缺失值所在的特征分为两个方向分支,一个是缺失值方向,一个是非缺失值方向。这样,模型在节点分裂时就可以同时考虑缺失值和非缺失值。
当处理预测数据时,如果预测样本有缺失值,xgboost会根据训练数据中缺失值对应的分支来判断它应该走向哪个分支。
另外,xgboost还为缺失值添加了一个特定的默认分支,用于处理无法处理的缺失值情况。
xgboost、lightGBM、catboost之间有哪些异同?
xgboost、lightGBM和CatBoost都是梯度提升决策树(GBDT)的变种算法,它们在原理和目标上有相似之处,但也有一些显著的异同点。以下是它们之间的主要异同:
1. 算法原理:
- xgboost:使用一阶和二阶梯度近似来进行树的学习。
- lightGBM:使用基于直方图的算法进行决策树的学习。
- CatBoost: 使用基于对称树遍历算法和特征统计方法来进行树的学习。
2. 处理缺失值:
- xgboost:将缺失值视为一种特殊的取值,将缺失值分为两个方向分支处理。
- lightGBM:将缺失值在切分过程中推送到一个单独的方向分支,与非缺失值样本一起进行分裂。
- CatBoost:使用基于统计和优化算法对缺失值进行处理。
3. 特征处理:
- xgboost:采用列块存储,特征选择使用贪婪算法。
- lightGBM:采用基于直方图的算法进行特征选择和缓存,可以处理类别特征。
- CatBoost:有自动特征处理的功能,可以处理类别特征。
4. 训练速度与性能:
- xgboost:使用并行处理和数据压缩等优化方法,具有较快的训练速度。
- lightGBM:采用基于直方图的算法和数据并行,在处理大规模数据集时具有较快的训练速度。
- CatBoost:使用对称树遍历算法,在某些情况下,训练速度相对较慢,但具有出色的准确性。
xgboost为什么要使用泰勒展开式,解决什么问题?
XGBoost使用泰勒展开式来解决优化目标函数的问题。泰勒展开式可以将一个复杂的函数近似为一个更简单的函数。在XGBoost中,泰勒展开式被用来近似损失函数的负梯度,即损失函数的一阶导数和二阶导数。这样做的目的是为了更高效地求解优化问题,加快收敛速度并提高模型的精确度。使用泰勒展开式可以简化目标函数的计算过程,使得XGBoost的训练速度更快、效果更好。
xgboost是如何寻找最优特征的?
XGBoost寻找最优特征的过程主要是通过分裂节点来实现的。具体来说,XGBoost使用贪心算法,按照特征的重要性顺序对每个特征进行分裂,以最大化每个节点的增益。增益的计算是基于目标函数的梯度和二阶导数,以及节点分裂之前和分裂之后的误差减少量。
XGBoost会遍历所有可能的特征和特征值,根据相对增益(Gain)来选择最佳的分裂点。相对增益是指当前分裂带来的减少误差相较于分裂之前的误差的比例。通过计算每个可能的分裂点的增益,并选择增益最大的特征和特征值作为当前节点的分裂点,这样可以将数据集划分为更加纯净的子集。
XGBoost还可以利用近似算法加速最优特征的寻找过程,通过对特征进行直方图的构建,在直方图上进行分裂点的搜索,降低计算复杂度而不影响准确性。
总的来说,XGBoost通过计算增益来评估每个特征的重要性,并利用贪心算法选择最佳的分裂点,以此来寻找最优特征。
k-means
简述k-means建模过程?
k-means是一种常用的聚类算法,其建模过程如下:
1. 初始化:给定要聚类的数据集和要划分的簇数k,随机选择k个初始聚类中心。
2. 分配数据点:对于每个数据点,计算其与各个聚类中心的距离(通常使用欧氏距离),将其分配到距离最近的聚类中心所属的簇。
3. 更新聚类中心:对每个簇,计算该簇内所有数据点的均值,将该均值作为新的聚类中心。
4. 重复步骤2和3,直到聚类中心不再发生变化,或者达到预定的迭代次数。
5. 输出聚类结果:每个数据点的划分簇标签即为聚类结果。
需要注意的是,k-means算法可能会收敛到局部最优解,因为初始的聚类中心是随机选择的。为了克服这个问题,可以多次运行k-means算法,选择最优的聚类结果。另外,k-means算法还可以通过设置停止条件,例如聚类中心不再发生变化,来提前终止迭代过程。
总的来说,k-means算法通过迭代寻找最优的聚类中心,将数据点划分为k个簇,使得同一个簇内的数据点相似度较高,不同簇之间的数据点相似度较低。
k-means损失函数是如何定义?
k-means算法的损失函数被称为“平方误差和”,通常用于衡量聚类的效果。具体定义如下:
假设有n个样本点和k个聚类中心。令x_i表示第i个样本点,c_j表示第j个聚类中心。那么每个样本点x_i到其所属聚类中心c_j的距离可以用欧氏距离表示为
d(x_i, c_j) = ||x_i - c_j||^2
通过聚类中心与各个样本点的距离,我们可以定义平方误差和(SSE)为:
SSE = Σ_i Σ_j w_{ij} * d(x_i, c_j)
其中,w_{ij}为样本点x_i与聚类中心c_j之间的隶属度权重,表示样本点x_i对聚类中心c_j的归属程度。在k-means算法中,w_{ij}等于1当样本点x_i为聚类中心c_j的最近邻,否则为0。
k-means算法的目标就是找到一组聚类中心,使得SSE最小化。通过迭代的方式更新聚类中心,并重新计算样本点的隶属度权重,直到收敛或达到最大迭代次数为止。
请注意,虽然k-means能够寻找到一种最小化SSE的聚类结果,但它可能会陷入局部最优解。因此,执行k-means算法时,通常需要多次运行该算法,以获取更稳健的聚类结果。
如何选择初始类族的中心点?
在k-means算法中,选择初始的聚类中心点对于聚类结果有一定的影响。虽然初始聚类中心点通常是随机选择的,但仍有一些方法可以帮助提高初始点的选择。
1. 随机选择:最简单的方法是随机选择k个数据点作为初始聚类中心。这种方法简单快捷,但可能会导致聚类结果受初始选择的影响较大。
2. K-means++:K-means++是一种改进的初始聚类中心点选择方法。它首先随机选择一个数据点作为第一个聚类中心,然后通过计算每个数据点与已有聚类中心的最短距离的累积和,选择下一个聚类中心。重复这个过程,直到选择完所有的聚类中心。这样可以增加聚类中心间的距离,有助于更好地代表数据集。
3. 基于密度的聚类中心选取:另一种方法是通过对数据集进行密度估计,选择具有较高密度的点作为聚类中心。这种方法可以帮助初始化聚类中心点更好地代表数据集的结构。
无论选择什么方法,执行k-means算法时往往需要多次运行,并选择得到最优聚类结果。可以通过运行多次并比较聚类结果的稳定性和评估指标(如SSE)来选择最佳的初始聚类中心点。
如何提升k-means效率?
要提高k-means算法的效率,可以考虑以下几点:
1. 数据预处理:在应用k-means算法之前,可以对数据进行预处理,例如特征缩放、降维等。这有助于减少计算量,提高算法的效率。
2. 对大数据集进行采样:如果数据集较大,可以考虑对数据集进行采样,以减少算法的计算量。可以随机选择一部分样本进行聚类,或者使用基于密度的采样方法来选择具有代表性的样本。
3. 并行计算:k-means算法的迭代步骤可以并行计算,以提升计算效率。可以使用并行计算框架(如Spark)或使用多线程进行计算。
4. 早期停止条件:在k-means算法的迭代过程中,可以设置早期停止条件,例如当聚类中心不再发生变化或达到一定的迭代次数时停止迭代。避免不必要的计算。
5. 聚类中心初始化:合理选择初始聚类中心可以减少算法的迭代次数。使用K-means++等初始化方法可以帮助更快地达到收敛。
6. 设置适当的簇数:簇数k的选择也会影响算法的效率。选择一个较小的簇数可以减少计算量,但可能会导致聚类结果的失真;选择一个较大的簇数会增加计算量。需要根据数据集的特点和实际需求进行平衡。
通过上述方法的应用,可以提高k-means算法的效率,加快聚类的速度。然而,需要根据具体情况进行调整和优化,找到适合的方法。
常用的距离衡量方法有哪些?各有什么优缺点?
- 欧氏距离:衡量直线距离,适用于连续型数据。优点是计算简单,缺点是受异常值影响较大。
- 曼哈顿距离:衡量城市街区距离,适用于连续型数据。优点是不受异常值影响,缺点是对数据分布敏感。
- 切比雪夫距离:衡量最大绝对差值,适用于连续型数据。优点是能够避免微小差异的影响,缺点是对数据分布敏感。
- 余弦相似度:衡量向量夹角的余弦值,适用于向量型数据。优点是不受维度影响,能够处理稀疏向量,缺点是无法反映绝对距离。
k-means对异常值是否敏感?为什么?
k-means对异常值是敏感的。在k-means算法中,异常值的存在可能会对聚类结果产生较大的影响,导致聚类中心偏移或聚类结果不准确。
这是因为k-means算法的聚类过程是基于样本之间的距离计算来确定簇的划分,而异常值的存在会导致某些数据点与聚类中心的距离较大,从而影响聚类中心的计算和簇的分配。更具体地说,异常值的存在可能会使得聚类中心向异常值偏移,从而导致正常数据点被错误地分到异常值所在的簇或者影响聚类中心的计算。
为了解决异常值对k-means算法的影响,可以采取一些方法,例如使用离群值检测技术来识别和处理异常值,或者选择使用一些对异常值不敏感的聚类算法,如基于密度的聚类算法(如DBSCAN)或基于概率模型的聚类算法(如高斯混合模型)。
如何评估聚类效果?
评估聚类效果的方法有多种,以下是一些常用的评估指标和方法:
1. SSE(Sum of Squared Errors):计算所有样本到其所属聚类中心的距离平方和,越小表示聚类效果越好。
2. Silhouette Coefficient(轮廓系数):综合考虑了样本到其所属簇内的紧密度和与其他簇的分离度,取值在-1到1之间,越接近1表示聚类效果越好。
3. Calinski-Harabasz Index:通过计算簇内离散度和簇间离散度的比值来评估聚类效果,数值越大表示聚类效果越好。
4. Davies-Bouldin Index:基于簇内离散度和簇间距离的平均值评估聚类效果,数值越小表示聚类效果越好。
5. Rand Index:通过比较聚类结果与参考标签的一致性来评估聚类效果,取值在0到1之间,越接近1表示聚类效果越好。
6. Jaccard Coefficient:基于聚类结果和参考标签的交集和并集计算聚类效果,取值在0到1之间,越接近1表示聚类效果越好。
选择合适的聚类评估指标取决于数据特点和问题需求,可以根据具体情况综合考虑多个指标来评估聚类效果。
k-means的超参数类的个数k值如何选取?
一般情况下,选择k的常用方法有以下几种:
1. 经验法则:根据经验选择k的值。例如,对于一些常见的应用领域,可能已经有一些关于簇的数量的常识。但该方法需要有一定的领域知识支持,且效果可能不够准确。
2. 肘部法则(Elbow Method):通过观察簇内误差平方和(SSE)与不同k值对应的变化趋势,选择一个使得SSE下降幅度明显减缓的k值。一般来说,随着k的增加,SSE会逐渐减小,但当k接近真实的簇数量时,SSE的下降幅度会变得较为缓慢。选择在SSE曲线出现“肘部”的位置对应的k值作为最佳值。
3. 轮廓系数(Silhouette Coefficient):计算不同k值下每个样本的轮廓系数,再取平均值。轮廓系数综合考虑了样本的类内相似度和类间相异度,数值范围在 -1 到 1 之间,接近1表示样本与同簇中的其他样本相似度高,与其他簇中的样本相似度低,反之亦然。选择具有最大平均轮廓系数的k值。
4. 验证指标(Validation Index):使用一些更为复杂的聚类验证指标,如轮廓系数、Calinski-Harabasz指数、Davies-Bouldin指数等。这些指标可以衡量聚类结果的紧密度、分离度和结构性,并根据指标的取值选择最优的k值。
需要注意的是,不同的方法可能会得到不同的k值,因此在选择k时,可以结合多个方法进行综合考虑,对比不同k值下的聚类结果和指标评估,最终选择最合适的k值。
k-means有哪些优缺点?是否有了解过改进的模型,举例说明?
k-means算法有以下几个优点:
1. 简单而高效:k-means算法是一种简单而高效的聚类算法,易于实现和理解,适用于大规模数据集。
2. 可扩展性强:k-means算法可以处理高维数据和大规模数据集,计算速度较快。
3. 聚类效果可解释性好:k-means算法生成的聚类结果相对直观,容易解释和理解。
然而,k-means算法也有一些缺点:
1. 敏感性:k-means算法对初始聚类中心的选择敏感,不同的初始值可能会导致不同的聚类结果。
2. 需要预先指定k值:k-means算法需要事先指定簇的数量k,但对于一些数据集来说,合适的k值可能并不明显。
3. 对异常值和离群值敏感:k-means算法容易受到异常值和离群值的影响,可能会导致聚类结果偏离真实的数据分布。
改进的k-means算法有很多,其中一些常见的包括:
1. K-means++:改进了初始聚类中心的选择,通过引入概率的方式,选择更加均匀分布的初始聚类中心,降低了对初始值的敏感性。
2. Mini-batch K-means:采用小批量随机梯度下降的方式,对大规模数据集进行聚类。通过使用一部分样本进行迭代更新,减少计算量,提高了算法的效率。
3. K-means++-medoids:将k-means算法中的聚类中心改为选择代表性的样本点(medoids),从而提高对离群值的鲁棒性。
这些改进的算法在k-means的基础上进行了一些改动和优化,以提高聚类效果、减少对初始值和异常值的敏感性,并在不同的应用场景中取得了一定的成功。
除了k-means聚类算法之外,还有哪些聚类算法?简要说明原理和优缺点
以下是一些常见的聚类算法及其原理和优缺点:
1. 层次聚类(Hierarchical Clustering):该算法通过将数据点逐步合并或分割来构建一个层次结构的聚类结果。可以有两种方法进行层次聚类:凝聚型聚类(Agglomerative Clustering)和分裂型聚类(Divisive Clustering)。凝聚型聚类从单个数据点开始,逐步合并最相似的数据点对,直到生成一个大的聚类。分裂型聚类刚好相反,从一个大的聚类开始,逐步分割为更小的聚类。优点是可以生成可视化的聚类树状结构,缺点是计算复杂度相对较高。
2. 密度聚类(Density-Based Clustering):这类算法基于数据点之间的密度来进行聚类。常见的密度聚类算法有DBSCAN(Density-Based Spatial Clustering of Applications with Noise)和OPTICS(Ordering Points To Identify the Clustering Structure)。这些算法通过定义邻域密度和核心对象来识别簇,并根据密度连接性将数据点分配给簇。优点是能够发现任意形状和大小的簇,对异常值具有较好的鲁棒性,但对于高维数据和不同密度的簇效果可能较差。
3. 谱聚类(Spectral Clustering):该算法将数据点视为图上的节点,通过图的代数特征将数据点映射到低维空间进行聚类。谱聚类算法通过计算数据点之间的相似性矩阵,进行图拉普拉斯特征分解,得到聚类结果。优点是对非球形和不规则形状的簇有较好的效果,但对噪声和异常点敏感,并且计算复杂度较高。
4. 高斯混合模型聚类(Gaussian Mixture Model Clustering):该算法基于概率模型,将数据点视为由多个高斯分布组成的混合分布。通过最大似然估计或期望最大化算法估计高斯混合模型参数,并根据概率将数据点分配给簇。优点是对于数据点从不同的高斯分布生成的情况有较好的效果,可以灵活地表示不同形状和密度的簇,但对初始参数的选择敏感。
这些聚类算法具有不同的原理和适用场景,根据具体的数据和问题要求选择合适的算法可以获得更好的聚类结果。
PCA降维
为什么要对数据进行降维?它能解决什么问题?
数据降维是指将高维数据转换为低维表示的过程。对数据进行降维的目的有以下几个:
1. 数据可视化:高维数据往往难以直观地展示和理解。通过将数据降维到二维或三维空间,可以更容易地进行可视化呈现,观察数据的分布和结构,发现潜在的模式和关系。
2. 特征选择:在高维数据中,可能存在很多冗余特征或噪声特征,对学习算法造成干扰,降低了算法的性能。通过降维,可以选择最具有代表性的特征,剔除冗余和噪声特征,提高学习算法的效率和准确性。
3. 计算效率:高维数据的处理和计算复杂度较高,会消耗大量的存储空间和计算资源。降维可以减少数据维度,简化数据表示和计算过程,提高计算效率。
4. 避免“维数灾难”:在高维空间中,样本密度往往呈现稀疏分布,导致样本之间的距离计算不准确。通过降维,可以将数据点映射到低维空间,减少维度灾难的影响,更准确地度量样本之间的相似度和距离。
降维方法可以有多种,如主成分分析(PCA)、线性判别分析(LDA)、局部线性嵌入(LLE)等。选择合适的降维方法和合适的维度可以根据具体问题的需求和数据特点来确定,以达到合理地减少数据维度、提取有效信息的目标。
如何理解维度灾难?
维度灾难(Curse of Dimensionality)是指在高维空间中,随着维度的增加,数据密度变得非常稀疏,导致在高维空间中进行数据分析和处理变得困难和费时。
维度灾难的一些主要特征和影响包括:
1. 数据稀疏性:在高维空间中,数据点之间的距离变大,数据点相互之间的距离趋近于相等,导致数据点的密度降低,难以区分不同的数据类别或聚类。
2. 数据冗余性:随着维度的增加,数据中的冗余信息也增加,使得挖掘和提取有用信息变得更加困难。因为高维数据中的许多特征可能是多余或无关的。
3. 计算复杂性:随着维度的增加,计算和存储高维数据的开销急剧增加,使得算法的计算复杂度大大增加,并且需要更多的样本数据来准确估计模型参数。
维度灾难的存在对于数据分析和机器学习领域带来了挑战,因为在高维空间中,算法的效果可能会显著下降,准确性会受到影响。为了应对维度灾难,可以考虑以下策略:
1. 特征选择:根据特征的相关性和重要性,选择最具代表性的特征,减少数据的维度,以保留最重要的信息。
2. 特征提取:使用降维技术如主成分分析(PCA)或线性判别分析(LDA),将高维数据转换为低维空间,保留尽可能多的信息。
3. 数据聚类:通过聚类算法将数据点组合成更高级别的数据组,减少数据点的个数,以减少维度的影响。
4. 数据采样:当训练数据集受到维度灾难的影响时,可以使用一些采样方法如分层抽样或聚类抽样来减少数据集的维度。
维度灾难是在高维空间中处理数据时需要面对的挑战,需要在实际问题中综合考虑数据的性质和特点,选择合适的方法来降低维度并提高分析和建模的效果。
PCA主成分分析思想是什么?如何定义主成分?
PCA(Principal Component Analysis,主成分分析)是一种常用的数据降维技术,其主要思想是通过线性变换将原始数据映射到一个新的坐标系中,使得映射后的数据在新的坐标系下具有最大的方差,从而实现数据的降维和特征提取。
在PCA中,主成分(Principal Component)是指数据在新的坐标系中的方向。第一个主成分是原始数据方差最大的方向;第二个主成分是与第一个主成分正交且方差次大的方向;以此类推,第n个主成分是与前n-1个主成分正交且方差第n大的方向。每个主成分都是原始数据特征的线性组合。
通常,可以通过计算数据的特征向量和特征值来找到主成分。特征向量表示了主成分的方向,特征值表示了主成分的方差。具体而言,主成分的定义是在降维后的坐标系中,数据在该方向上的投影方差最大。
PCA有哪些局限性?如何优化
PCA的一些局限性包括:
1. 线性假设:PCA假设数据是线性相关的,无法处理非线性关系的数据。
2. 方差最大化:PCA通过最大化方差来选择主成分,但忽略了其他可能有用的信息。
3. 数据失真:降维后的数据可能无法完全表示原始数据的所有细节,存在信息损失的风险。
4. 敏感性:PCA对异常值和噪音较为敏感,可能导致不准确的结果。
为了优化PCA的一些局限性,可以考虑以下方法:
1. 使用非线性降维方法:对于非线性关系的数据,可以尝试使用非线性降维方法,如核主成分分析(Kernel PCA)或流形学习算法。
2. 考虑其他目标函数:除了方差最大化,可以根据具体问题考虑其他目标函数,如最小化重构误差或最大化类别区分度。
3. 结合多种降维技术:不同的降维方法有各自的优势和适用范围,可以考虑结合多种降维技术来获取更好的结果。
4. 鲁棒性处理:为了减少异常值和噪音对降维结果的影响,可以使用鲁棒性PCA方法或者在数据预处理阶段进行异常值检测和噪音过滤。
如何设计目标函数使得降维达到提取主成分的目的?
为了设计目标函数以实现降维并提取主成分的目的,可以考虑以下几个方面:
1. 方差最大化:目标是尽可能地保留原始数据的信息量。通过最大化投影后数据的方差,我们可以确保在降维后尽可能地保留原始数据的总体特征。
2. 保持数据的结构和相关性:除了方差,还可以考虑保持数据之间的相关性和结构。通过考虑协方差矩阵或相关矩阵,可以设计目标函数以最小化投影后数据间的相关性损失。
3. 分类或聚类目标:如果我们的目标是在降维后更好地进行分类或聚类,可以设计目标函数以最大化类间差异和最小化类内差异。这样可以使得投影后的数据在不同类别或簇之间更加分离。
4. 特定问题的需求:对于特定问题,可以根据需求定制目标函数。例如,对于图像处理,可以设计目标函数以最大化图像质量指标(如PSNR)或最小化图像重构误差。
总之,设计目标函数时需要根据具体问题的要求和需求考虑,可以结合数据的特点和领域知识来指导降维和主成分提取的目标函数的设计。
线性判别分析和主成分分析在原理上有何异同?在目标函数上有何区别和联系?
线性判别分析(Linear Discriminant Analysis,LDA)和主成分分析(Principal Component Analysis,PCA)是常用的降维和特征提取技术。
在原理上,LDA和PCA存在一些异同:
1. 目的:PCA的目标是通过最大化投影后数据的方差,来找到数据的主成分,以实现数据的降维和特征提取。而LDA的目标是通过最大化类间差异和最小化类内差异,来找到能够更好地进行分类的投影方向。
2. 数据要求:PCA对数据的线性关系不加限制,适用于任意的数据类型。LDA假设数据符合类别正态分布,适用于有监督的分类问题。
3. 投影方向:PCA的投影方向是统计上最能解释原始数据方差的方向,与具体类别无关。LDA的投影方向是最能区分不同类别的方向,具有分类信息。
在目标函数上,LDA和PCA也有区别和联系:
1. 相同之处:LDA和PCA的目标函数都可以通过最大化特征值或最优化的方式来求解。它们都涉及到关于数据的协方差矩阵或相关矩阵的计算。
2. 区别:PCA的目标函数是最大化特征值,即最大化投影后数据的方差。而LDA的目标函数是最大化类间散度和最小化类内散度的比值,即最大化类间差异和最小化类内差异的程度。
3. 联系:PCA可以看作是LDA的一种特殊情况,即当类别信息无法得到利用时,LDA退化为PCA。
相关文章:
)
算法工程师-机器学习面试题总结(3)
FM模型 FM模型与逻辑回归相比有什么优缺点? FM(因子分解机)模型和逻辑回归是两种常见的预测建模方法,它们在一些方面有不同的优缺点。 FM模型的优点: 1. 能够捕获特征之间的交互作用:FM模型通过对特征向量…...
进程内topic高效通信)
ROS2学习(五)进程内topic高效通信
对ROS2有一定了解后,我们会发现ROS2中节点和ROS1中节点的概率有很大的区别。在ROS1中节点是最小的进程单元。在ROS2中节点与进程和线程的概念完全区分开了。具体区别可以参考 ROS2学习(四)进程,线程与节点的关系。 在ROS2中同一个进程中可能存在多个节点…...

算法-最大数
给定一组非负整数 nums,重新排列每个数的顺序(每个数不可拆分)使之组成一个最大的整数。 注意:输出结果可能非常大,所以你需要返回一个字符串而不是整数。 输入:nums [10,2] 输出:"210&…...

Spark中使用RDD算子GroupBy做词频统计的方法
测试文件及环境 测试文件在本地D://tmp/spark.txt,Spark采用Local模式运行,Spark版本3.2.0,Scala版本2.12,集成idea开发环境。 hello world java world java java实验代码 import org.apache.spark.rdd.RDD import org.apache.…...
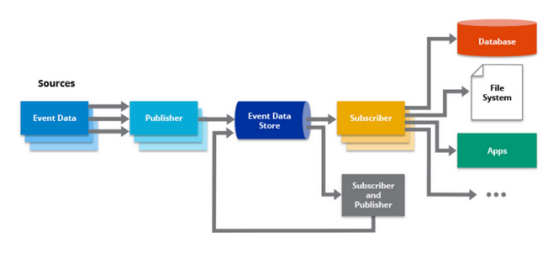
如何使用Kafka构建事件驱动的架构
事件驱动的架构(EDA)是一种软件设计模式,它关注事件的生成、检测和使用,以支持高效和可扩展的系统。在EDA中,事件是组件之间通信的主要手段,允许它们实时交互和响应更改。这种架构促进了松散耦合、可扩展性和响应性,使…...

ES6 解构赋值
解构赋值 解构赋值是一种在编程中常见且方便的语法特性,它可以让你从数组或对象中快速提取数据,并将数据赋值给变量。在许多编程语言中都有类似的特性。 在 JavaScript 中,解构赋值使得从数组或对象中提取数据变得简单。它可以用于数组和对…...
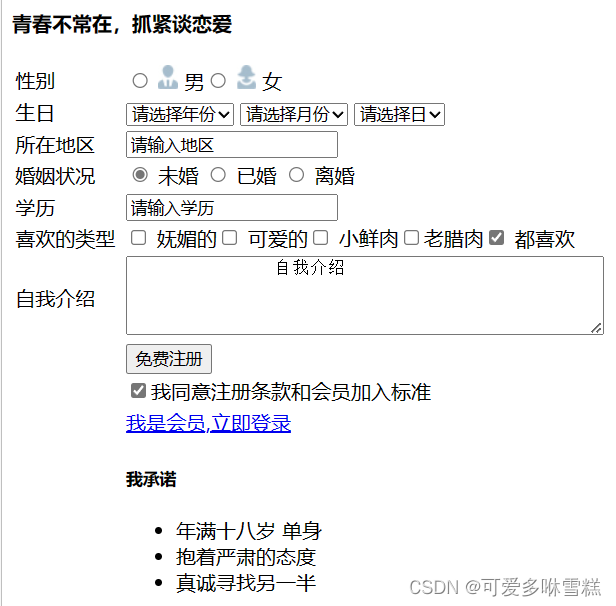
HTML5注册页面
分析 注册界面实际上是一个表格(对齐),一行有两个单元格。 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8" /><meta name"viewport" content"widthdevic…...

python中的JSON模块详解
简介 JSON(JavaScript Object Notation) 是一种轻量级的数据交换格式,它使得人们很容易的进行阅读和编写 同时也方便了机器进行解析和生成。适用于进行数据交互的场景,比如网站前台与后台之间的数据交互 网址 官方文档 json — JSON encoder and dec…...
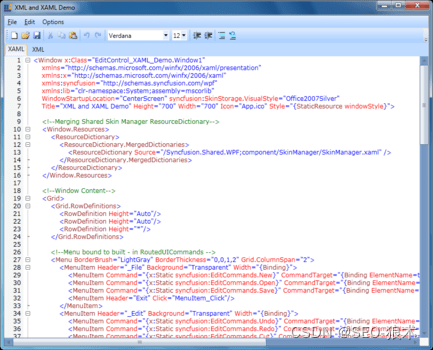
Syncfusion Essential Edit for WPF Crack
Syncfusion Essential Edit for WPF Crack 在任何WPF应用程序中启用语法高亮显示。 Syncfusion Essential Edit for WPF是一款具有所有基本功能的编辑器,如文本编辑、剪切、复制和粘贴。它允许用户从各种文件格式打开文件并将其保存为各种文件格式。Syncfusion Esse…...
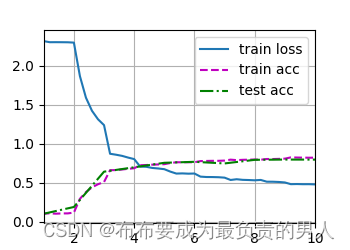
机器学习深度学习——卷积神经网络(LeNet)
👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er 🌌上期文章:机器学习&&深度学习——池化层 📚订阅专栏:机器学习&&深度学习 希望文章对你们有所帮助 卷积神…...
Pytorch Tutorial【Chapter 2. Autograd】
Pytorch Tutorial 文章目录 Pytorch TutorialChapter 2. Autograd1. Review Matrix Calculus1.1 Definition向量对向量求导1.2 Definition标量对向量求导1.3 Definition标量对矩阵求导 2.关于autograd的说明3. grad的计算3.1 Manual手动计算3.2 backward()自动计算 Reference C…...

Python第三方库国内镜像下载地址
Python第三方库国内镜像下载地址 一、清华大学二、中国科技大学三、安装方法 一、清华大学 https://pypi.tuna.tsinghua.edu.cn/simple 二、中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple 三、安装方法 例如 pyhook3 插件的安装方法,执行下面命令安装…...
服务端机器一般部署在哪里)
从浏览器输入url到页面加载(七)服务端机器一般部署在哪里
前言 上一节,我们说到了CDN和路由器的关系,说到了公有地址,说到了通信线路服务,这一节跳过那些看不懂的深层知识,直接开始说web服务器。 1. 服务端机器为什么不部署在公司内部 记得在之前的一段时间里,公…...
Pytorch深度学习-----神经网络之Sequential的详细使用及实战详解
系列文章目录 PyTorch深度学习——Anaconda和PyTorch安装 Pytorch深度学习-----数据模块Dataset类 Pytorch深度学习------TensorBoard的使用 Pytorch深度学习------Torchvision中Transforms的使用(ToTensor,Normalize,Resize ,Co…...
安全基础 --- https详解 + 数组(js)
CIA三属性:完整性(Confidentiality)、保密性(Integrity)、可用性(Availability),也称信息安全三要素。 https 核心技术:用非对称加密传输对称加密的密钥,然后…...

vue加载大量数据优化
在Vue中加载大量数据并形成列表时,可以通过以下方法来优化性能: 分页加载:不要一次性加载所有的数据,而是分批加载数据,每次只加载当前页需要显示的数据量。可以使用第三方库如vue-infinite-loading来实现无限滚动加载…...

WebRTC 之音视频同步
在网络视频会议中, 我们常会遇到音视频不同步的问题, 我们有一个专有名词 lip-sync 唇同步来描述这类问题,当我们看到人的嘴唇动作与听到的声音对不上的时候,不同步的问题就出现了 而在线会议中, 听见清晰的声音是优先…...
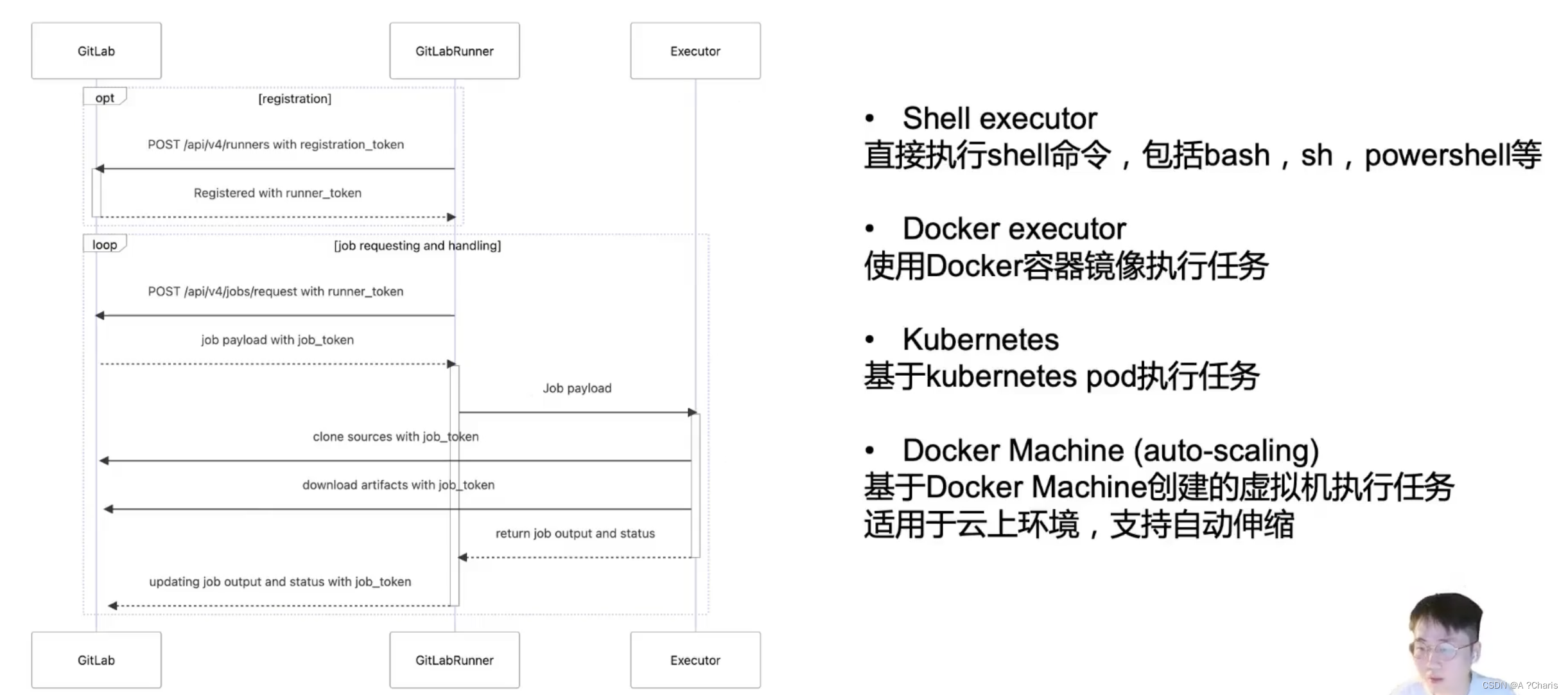
kubernetes基于helm部署gitlab-runner
kubernetes基于helm部署gitlab-runner 这篇博文介绍如何在 Kubernetes 中使用helm部署 GitLab-runner。 先决条件: 已运行的 Kubernetes 集群已运行的 gitlab 实例 项目地址:https://gitlab.com/gitlab-org/charts/gitlab-runner 官方文档ÿ…...

深度学习和OpenCV的对象检测(MobileNet SSD图像识别)
基于深度学习的对象检测时,我们主要分享以下三种主要的对象检测方法: Faster R-CNN(后期会来学习分享)你只看一次(YOLO,最新版本YOLO3,后期我们会分享)单发探测器(SSD,本节介绍,若你的电脑配置比较低,此方法比较适合R-CNN是使用深度学习进行物体检测的训练模型; 然而,…...
Gitlab CI/CD笔记-第一天-GitOps和以前的和jenkins的集成的区别
一、GitOps-CI/CD的流程图与Jenkins的流程图 从上图可以看到: GitOps与基于Jennkins技术栈的CI/CD流程,无法从Jenkins集成其他第三方开源的项目来实现换成了Gitlab来进行集成。 好处在于:CI 一个工具Gitlab就行了,但CD部分依旧是…...

Chapter03-Authentication vulnerabilities
文章目录 1. 身份验证简介1.1 What is authentication1.2 difference between authentication and authorization1.3 身份验证机制失效的原因1.4 身份验证机制失效的影响 2. 基于登录功能的漏洞2.1 密码爆破2.2 用户名枚举2.3 有缺陷的暴力破解防护2.3.1 如果用户登录尝试失败次…...

可靠性+灵活性:电力载波技术在楼宇自控中的核心价值
可靠性灵活性:电力载波技术在楼宇自控中的核心价值 在智能楼宇的自动化控制中,电力载波技术(PLC)凭借其独特的优势,正成为构建高效、稳定、灵活系统的核心解决方案。它利用现有电力线路传输数据,无需额外布…...
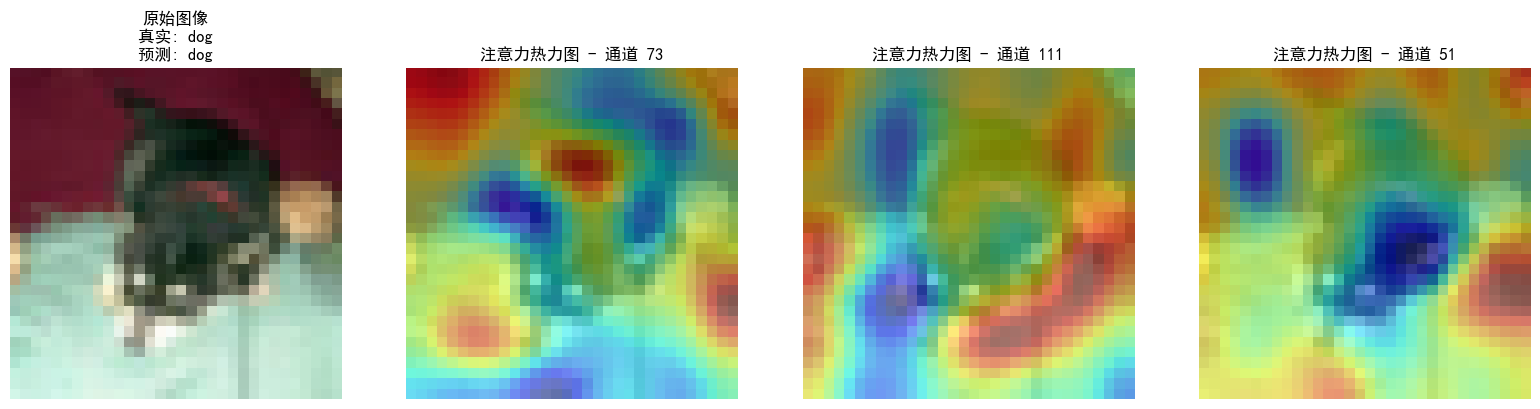
DAY 47
三、通道注意力 3.1 通道注意力的定义 # 新增:通道注意力模块(SE模块) class ChannelAttention(nn.Module):"""通道注意力模块(Squeeze-and-Excitation)"""def __init__(self, in_channels, reduction_rat…...

Go 语言接口详解
Go 语言接口详解 核心概念 接口定义 在 Go 语言中,接口是一种抽象类型,它定义了一组方法的集合: // 定义接口 type Shape interface {Area() float64Perimeter() float64 } 接口实现 Go 接口的实现是隐式的: // 矩形结构体…...
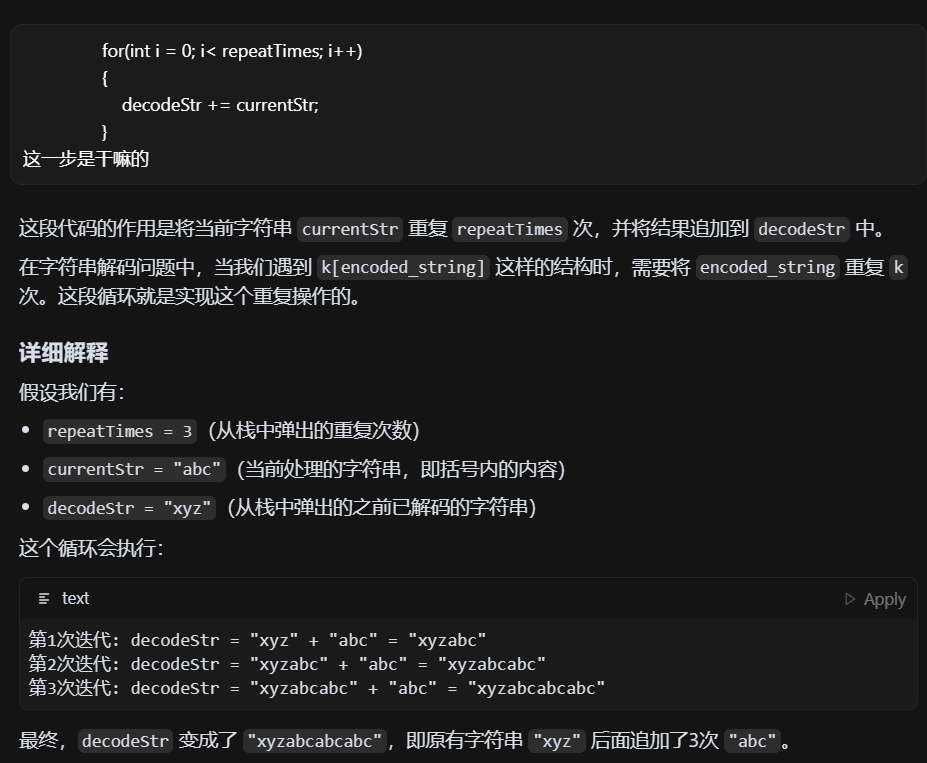
LeetCode - 394. 字符串解码
题目 394. 字符串解码 - 力扣(LeetCode) 思路 使用两个栈:一个存储重复次数,一个存储字符串 遍历输入字符串: 数字处理:遇到数字时,累积计算重复次数左括号处理:保存当前状态&a…...

蓝牙 BLE 扫描面试题大全(2):进阶面试题与实战演练
前文覆盖了 BLE 扫描的基础概念与经典问题蓝牙 BLE 扫描面试题大全(1):从基础到实战的深度解析-CSDN博客,但实际面试中,企业更关注候选人对复杂场景的应对能力(如多设备并发扫描、低功耗与高发现率的平衡)和前沿技术的…...

[10-3]软件I2C读写MPU6050 江协科技学习笔记(16个知识点)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...

【分享】推荐一些办公小工具
1、PDF 在线转换 https://smallpdf.com/cn/pdf-tools 推荐理由:大部分的转换软件需要收费,要么功能不齐全,而开会员又用不了几次浪费钱,借用别人的又不安全。 这个网站它不需要登录或下载安装。而且提供的免费功能就能满足日常…...

华为OD机考-机房布局
import java.util.*;public class DemoTest5 {public static void main(String[] args) {Scanner in new Scanner(System.in);// 注意 hasNext 和 hasNextLine 的区别while (in.hasNextLine()) { // 注意 while 处理多个 caseSystem.out.println(solve(in.nextLine()));}}priv…...