基于单片机DHT11温湿度NRF2401无线通信控制系统
一、系统方案
本设计采用STC89C5单片机作为主控制器,从机采用DHT11传感器采集温湿度、按键设置报警阀值,液晶1602显示,蜂鸣器报警,无线NRF2401模块。

二、硬件设计
原理图如下:

三、单片机软件设计
1、首先是系统初始化:
init_io(); // 初始化IO
RX_Mode(); // 设置为接收模式
LCD_Initial(); //液晶初始化
2、液晶显示程序
//1602程序
//内部等待函数*************************************************************
unsigned char LCD_Wait(void)
{
RS=0;
RW=1; nop();
E=1; nop();
E=0;
return DBPort;
}
//向LCD写入命令或数据********************************************************
#define LCD_COMMAND 0 // Command
#define LCD_DATA 1 // Data
#define LCD_CLEAR_SCREEN 0x01 // 清屏
#define LCD_HOMING 0x02 // 光标返回原点
void LCD_Write(bit style, unsigned char input)
{
E=0;
RS=style;
RW=0; nop();
DBPort=input; nop();//注意顺序
E=1; nop();//注意顺序
E=0; nop();
LCD_Wait();
}
//设置显示模式************************************************************
#define LCD_SHOW 0x04 //显示开
#define LCD_HIDE 0x00 //显示关
#define LCD_CURSOR 0x02 //显示光标
#define LCD_NO_CURSOR 0x00 //无光标
#define LCD_FLASH 0x01 //光标闪动
#define LCD_NO_FLASH 0x00 //光标不闪动
void LCD_SetDisplay(unsigned char DisplayMode)
{
LCD_Write(LCD_COMMAND, 0x08|DisplayMode);
}
//设置输入模式************************************************************
#define LCD_AC_UP 0x02
#define LCD_AC_DOWN 0x00 // default
#define LCD_MOVE 0x01 // 画面可平移
#define LCD_NO_MOVE 0x00 //default
void LCD_SetInput(unsigned char InputMode)
{
LCD_Write(LCD_COMMAND, 0x04|InputMode);
}
//初始化LCD************************************************************
void LCD_Initial()
{
E=0;
LCD_Write(LCD_COMMAND,0x38); //8位数据端口,2行显示,5*7点阵
LCD_Write(LCD_COMMAND,0x38);
LCD_SetDisplay(LCD_SHOW|LCD_NO_CURSOR); //开启显示, 无光标
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏
LCD_SetInput(LCD_AC_UP|LCD_NO_MOVE); //AC递增, 画面不动
}
//液晶字符输入的位置************************
void GotoXY(unsigned char x, unsigned char y)
{
if(y0)
LCD_Write(LCD_COMMAND,0x80|x);
if(y1)
LCD_Write(LCD_COMMAND,0x80|(x-0x40));
}
//将字符输出到液晶显示
void Print(unsigned char *str)
{
while(*str!=‘\0’)
{
LCD_Write(LCD_DATA,*str);
str++;
}
}
3、按键检测程序
void key()
{
if (k10) //调整按键检测
{
delay(10);
if (k10)
{
presskeynum++;
if(presskeynum5)
presskeynum=0;
while(k10);
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏
}
}
if(presskeynum1)//温度上限设置
{
if(k20)// 加
{
delay(10);
temp_high++;
if (temp_high>99)
temp_high=0;
if (temp_high<0)
temp_high=99;
while(k20); //加上此句必须松按键才处理
}
if(k30)//减
{
delay(10);
temp_high–;
if (temp_high>99)
temp_high=0;
if (temp_high<0)
temp_high=99;
while(k30); //加上此句必须松按键才处理
}
}
if(presskeynum2)//温度下限设置
{
if(k20)// 加
{
delay(10);
temp_low++;
if (temp_low>99)
temp_low=0;
if (temp_low<0)
temp_low=99;
while(k20);
}
if(k30)
{
delay(10);
temp_low–;
if (temp_low>99)
temp_low=0;
if (temp_low<0)
temp_low=99;
while(k30);
}
}
if(presskeynum3)//湿度上限设置
{
if(k20)// 加
{
delay(10);
humi_high++;
if (humi_high>99)
humi_high=0;
if (humi_high<0)
humi_high=99;
while(k20);
}
if(k30)
{
delay(10);
humi_high–;
if (humi_high>99)
humi_high=0;
if (humi_high<0)
humi_high=99;
while(k30);
}
}
if(presskeynum4)//湿度下限设置
{
if(k20)//加
{
delay(10);
humi_low++;
if (humi_low>99)
humi_low=0;
if (humi_low<0)
humi_low=99;
while(k20);
}
if(k30)// 减
{
delay(10);
humi_low–;
if (humi_low>99)
humi_low=0;
if (humi_low<0)
humi_low=99;
while(k30);
}
}
if(k40)// 退出键
{
delay(10);
if(k40)
{
while(k4==0);
presskeynum=0;
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏}
}
}
4、核心算法程序
/**************************************************/
/**************************************************
*函数名: SPI_RW
*函数功能: 读写一个字节
*输入: 无
*输出: 无
//
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) // 循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; // 低一位移位到最高位
SCK = 1; // 拉高SCK,nRF24L01从MOSI读取1位数据,同时从MISO输出1位数据
byte |= MISO; // 读MISO到byte最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读取一个字节
}
//
/**************************************************
*函数名: SPI_RW_Reg
*函数功能: 写数据到reg
*输入: 无
*输出: 无
//
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 写数据到寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: SPI_Read
*函数功能: 从reg寄存器读字节
*输入: 无
*输出: 无
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;CSN = 0; // CSN置低,开始传输数据SPI_RW(reg); // 选择寄存器reg_val = SPI_RW(0); // 然后从该寄存器读数据CSN = 1; // CSN拉高,结束数据传输return(reg_val); // 返回寄存器数据
}
/**************************************************/
/**************************************************
*函数名: SPI_Read_Buf
*函数功能: 从reg寄存器读数据
*输入: 无
*输出: 无
//
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: SPI_Write_Buf
*函数功能: 把缓存的数据写入NRF
*输入: 无
*输出: 无
//
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); // 逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: RX_Mode
*函数功能: 将nrf设置为接收模式
*输入: 无
*输出: 无
//
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
delay_ms(150);
CE = 1; // 拉高CE启动接收设备
}
//
/**************************************************
*函数名: TX_Mode
*函数功能: 将nrf设置为发送模式
*输入: 无
*输出: 无
//
void TX_Mode(uchar * BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
delay_ms(150);
CE = 1;
}
//
/**************************************************
*函数名: Check_ACK
*函数功能: 检查接收设备有无数据包,设定没有应答信号重发
*输入: 无
*输出: 无
/**************************************************/
uchar Check_ACK(bit clear)
{
while(IRQ);
sta = SPI_RW(NOP); // 返回状态寄存器
if(TX_DS)
{
//blink(3);
}
//blink(5);
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
相关文章:
基于单片机DHT11温湿度NRF2401无线通信控制系统
一、系统方案 本设计采用STC89C5单片机作为主控制器,从机采用DHT11传感器采集温湿度、按键设置报警阀值,液晶1602显示,蜂鸣器报警,无线NRF2401模块。 二、硬件设计 原理图如下: 三、单片机软件设计 1、首先是系统…...
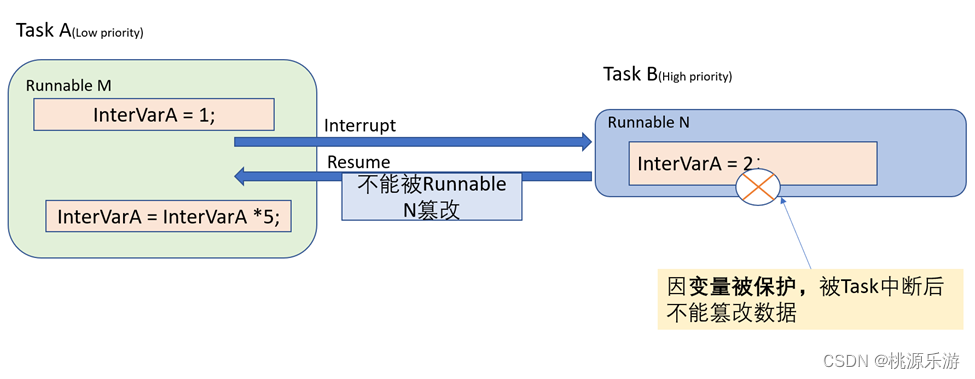
AutoSAR配置与实践(基础篇)2.5 RTE对数据一致性的管理
传送门 点击返回 ->AUTOSAR配置与实践总目录 AutoSAR配置与实践(基础篇)2.5 RTE对数据一致性的管理 一、 数据一致性问题引入二、 数据一致性的管理2.1 RTE管理 (SWC间)2.2 中断保护 (SWC内)2.3 变量保护IRVS (SWC内)2.4 Task分配2.5 任务抢占控制 一…...
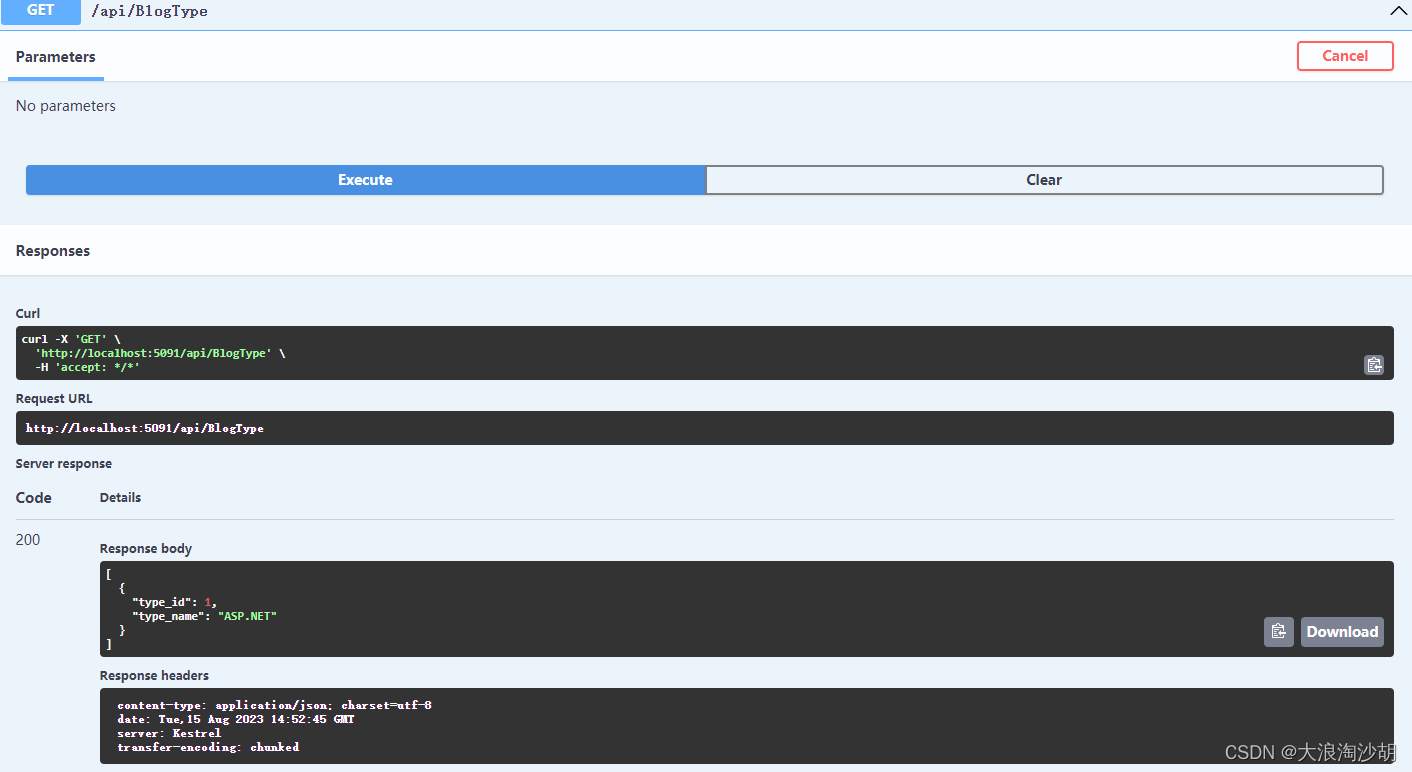
ASP.NET WEB API通过SugarSql连接MySQL数据库
注意:VS2022企业版可以,社区版可能存在问题。实体名称和字段和数据库中的要一致。 1、创建项目,安装SqlSugarCore、Pomelo.EntityFrameworkCore.MySql插件 2、文件结构 2、appsettings.json { “Logging”: { “LogLevel”: { “Default”: …...
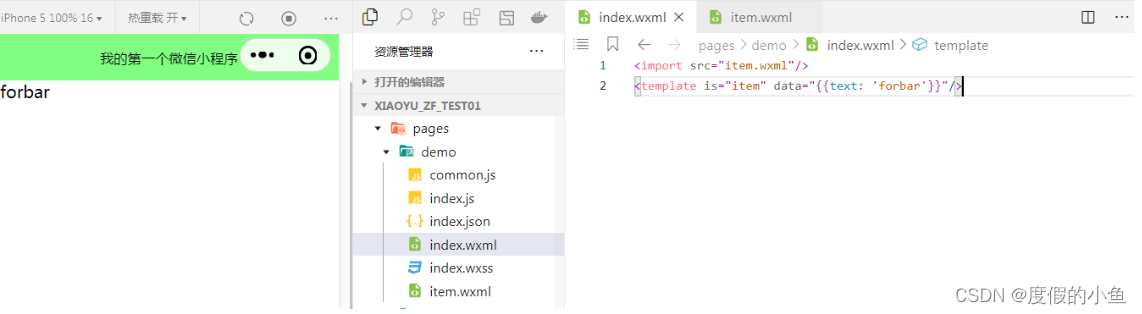
08-微信小程序视图层
08-微信小程序视图层 文章目录 视图层 ViewWXML数据绑定列表渲染条件渲染模板引用importimport 的作用域include WXSS尺寸单位样式导入内联样式选择器全局样式与局部样式 WXS注意事项页面渲染数据处理 视图层 View 框架的视图层由 WXML 与 WXSS 编写,由组件来进行…...

[机器学习]特征工程:特征降维
特征降维 1、简介 特征降维是指通过减少特征空间中的维度,将高维数据映射到一个低维子空间的过程。 在机器学习和数据分析中,特征降维可以帮助减少数据的复杂性、降低计算成本、提高模型性能和可解释性,以及解决维度灾难等问题。特征降维通…...
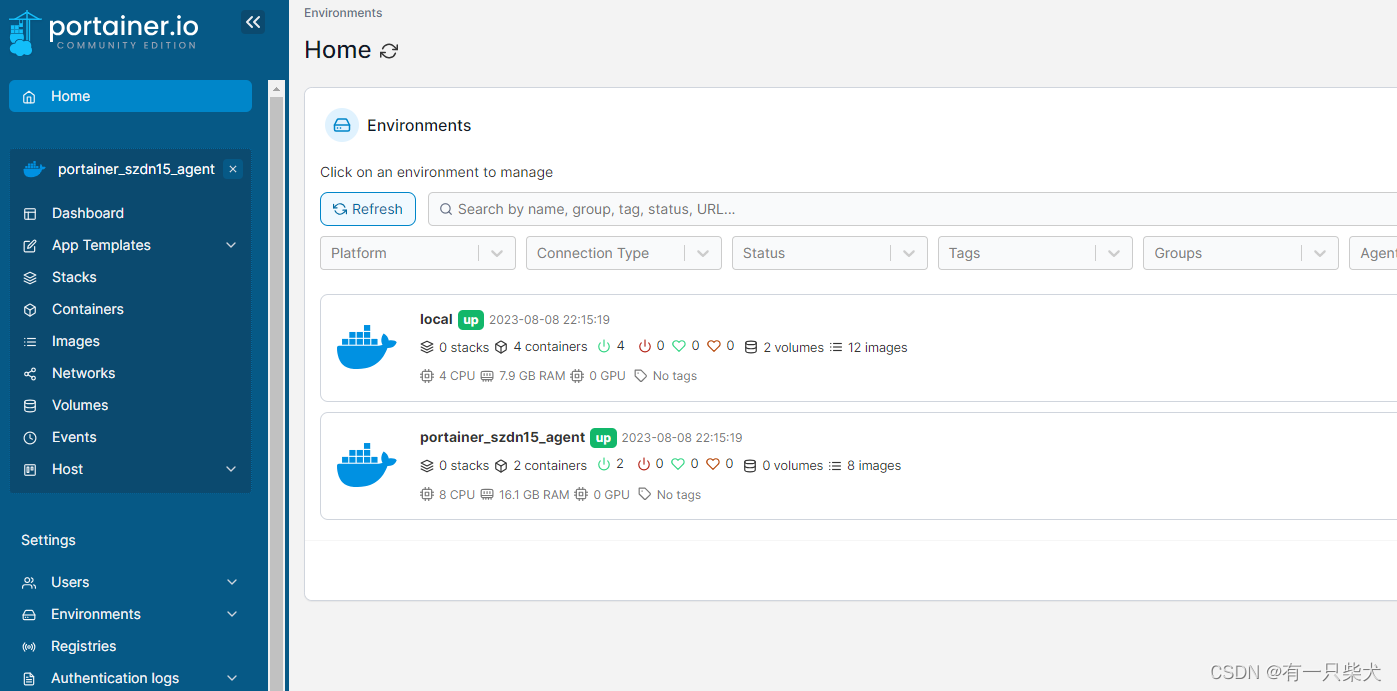
12. Docker可视化工具
目录 1、前言 2、Docker UI 2.1、部署Docker UI 2.2、管理容器 3、Portainer 3.1、部署Portainer 3.2、管理容器 3.3、添加远程Docker 4、Shipyard 1、前言 Docker 提供了命令行工具来管理 Docker 的镜像和运行 Docker 的容器。我们也可以使用图形工具来管理 Docker。…...

css层叠关系
文章目录 cascading声明冲突应用重置样式表a元素的类选择器顺序问题 cascading cascading – 层叠 解决声明冲突的过程,浏览器会自动处理;就是计算样式的权重,权重大的就被选择; 声明冲突 是指多个选择器选中同一个标签&#x…...

【Unity实战篇 】| 如何在小游戏中快速接入一个新手引导教程
前言 【Unity实战篇 】 | 如何在小游戏中快速接入一个新手引导教程一、简单教程描述二、接入Tutorial Master 实现游戏引导2.1 导入Tutorial Master2插件2.2 添加TutorialMasterManager脚本对象2.3 配置Tutorial,用于管理第一段引导内容2.4 配置Stage,用…...

Lookup Singularity
1. 引言 Lookup Singularity概念 由Barry WhiteHat在2022年11月在zkResearch论坛 Lookup Singularity中首次提出: 其主要目的是:让SNARK前端生成仅需做lookup的电路。Barry预测这样有很多好处,特别是对于可审计性 以及 形式化验证ÿ…...
idea 本地版本控制 local history
idea 本地版本控制 local history 如何打开 1 自定义快捷键 settings->keymap->搜索框输入 show history -》Add Keyboard Shortcut -》设置为 CtrlAltL 2 右键文件-》local history -》show history 新建文件 版本1,creating class com.geekmice…这个是初…...
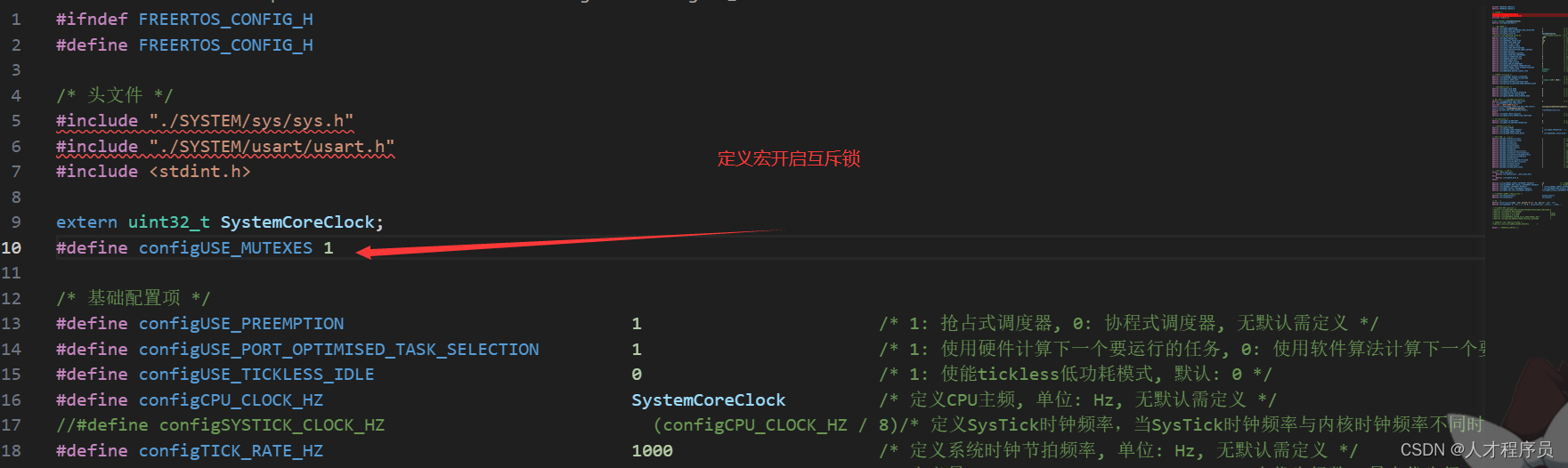
【Freertos基础入门】深入浅出freertos互斥量
文章目录 前言一、互斥量是什么?二、互斥量的使用场景三、互斥量的使用1.创建 2.删除互斥量3.give和take四、示例代码总结 前言 FreeRTOS是一款开源的实时操作系统,提供了许多基本的内核对象,其中包括互斥锁(Mutex)。…...
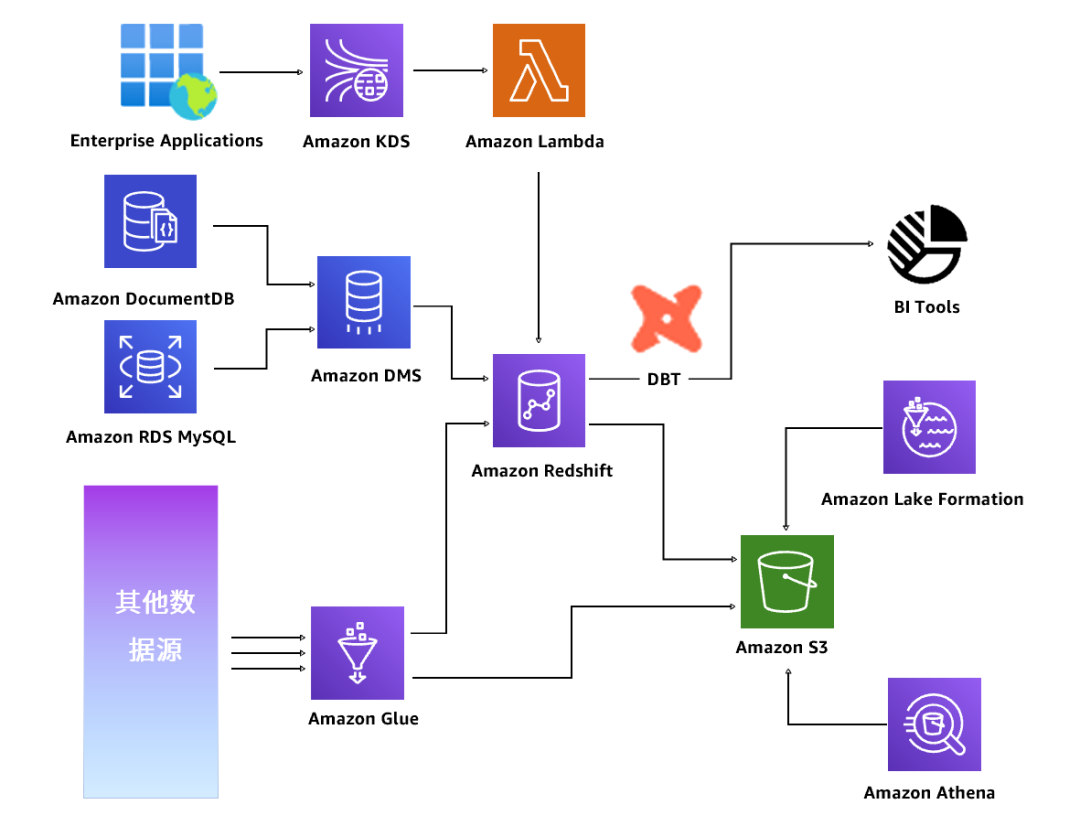
皮爷咖啡基于亚马逊云科技的数据架构,加速数据治理进程
皮爷咖啡(Peet’s Coffee)是美国精品咖啡品牌,于2017年进入中国,为中国消费者带来传统经典咖啡饮品,并特别呈现更加丰富的品质咖啡饮品体验。通过深入应用亚马逊云科技云原生数据库产品Amazon Redshift以及Amazon DMS等…...

C++ string类详解
⭐️ string string 是表示字符串的字符串类,该类的接口与常规容器的接口基本一致,还有一些额外的操作 string 的常规操作,在使用 string 类时,需要使用 #include <string> 以及 using namespace std;。 ✨ 帮助文档&…...

深入浅出Pytorch函数——torch.nn.init.ones_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...

一、docker及mysql基本语法
文章目录 一、docker相关命令二、mysql相关命令 一、docker相关命令 (1)拉取镜像:docker pull <镜像ID/image> (2)查看当前docker中的镜像:docker images (3)删除镜像&#x…...
【计算机网络】13、ARP 包:广播自己的 mac 地址和 ip
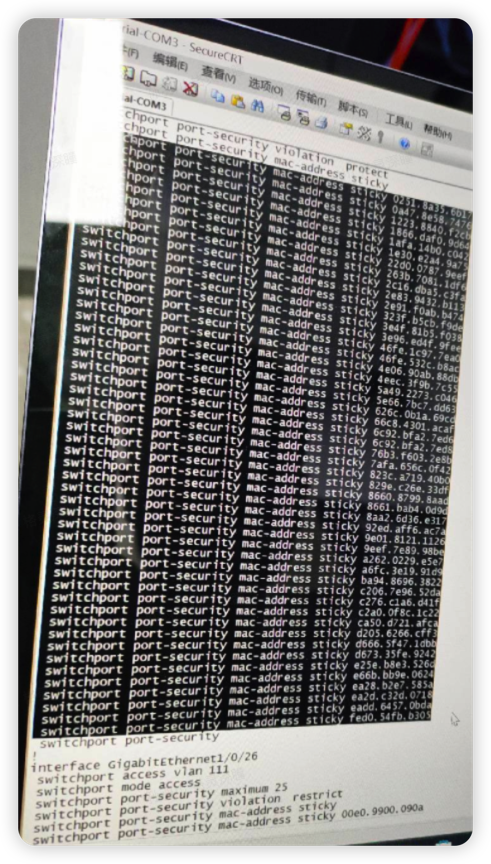
机器启动时,会向外广播自己的 mac 地址和 ip 地址,这个即称为 arp 协议。范围是未经过路由器的部分,如下图的蓝色部分,范围内的设备都会在本地记录 mac 和 ip 的绑定信息,若有重复则覆盖更新(例如先收到 ma…...

通过微软Azure调用GPT的接口API-兼容平替OpenAI官方的注意事项
众所周知,我们是访问不通OpenAI官方服务的,但是我们可以自己通过代理或者使用第三方代理访问接口 现在新出台的规定禁止使用境外的AI大模型接口对境内客户使用,所以我们需要使用国内的大模型接口 国内的效果真的很差,现在如果想使…...

回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图)效果一览基本介绍程序设计…...

GAN!生成对抗网络GAN全维度介绍与实战
目录 一、引言1.1 生成对抗网络简介1.2 应用领域概览1.3 GAN的重要性 二、理论基础2.1 生成对抗网络的工作原理2.1.1 生成器生成过程 2.1.2 判别器判别过程 2.1.3 训练过程训练代码示例 2.1.4 平衡与收敛 2.2 数学背景2.2.1 损失函数生成器损失判别器损失 2.2.2 优化方法优化代…...
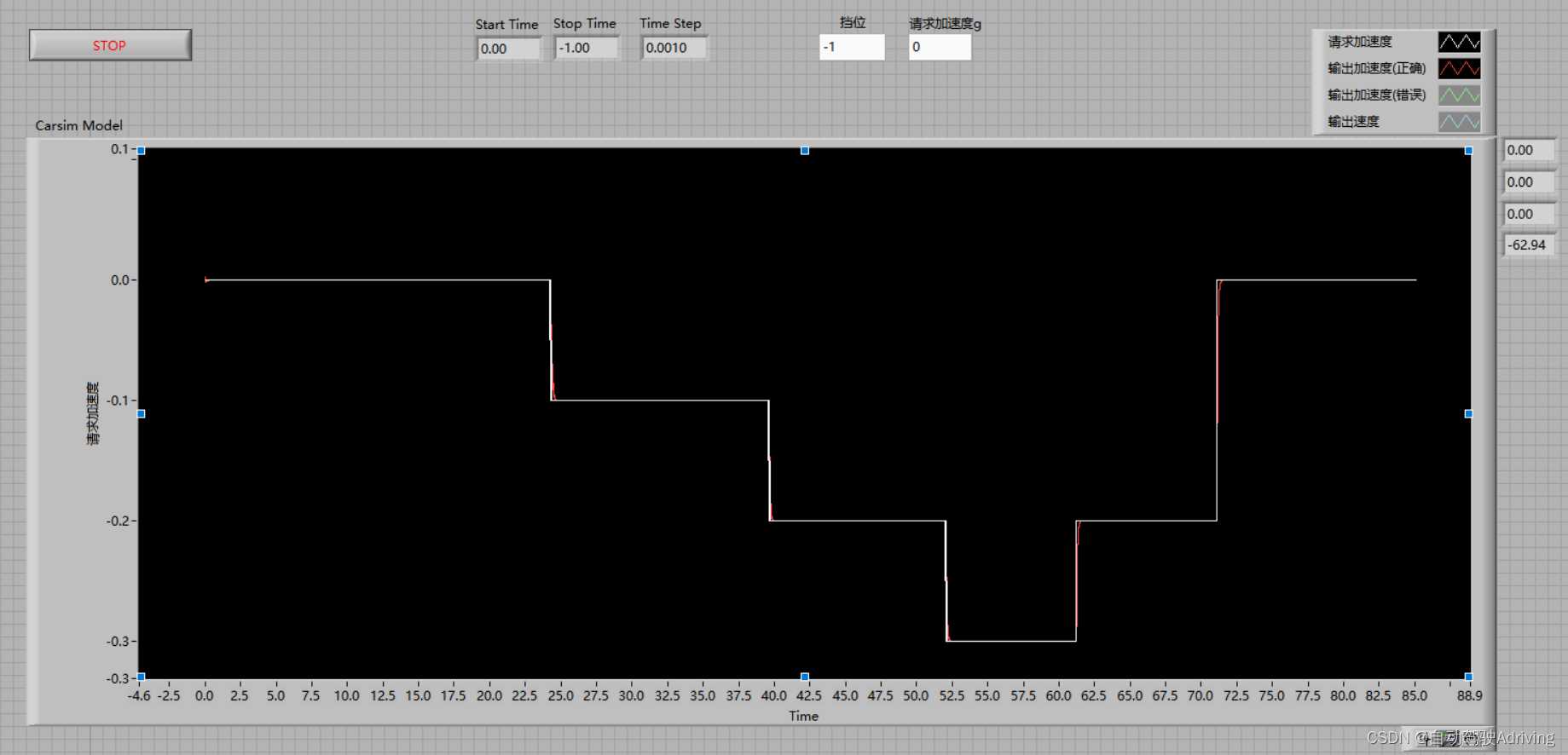
自动驾驶仿真:基于Carsim开发的加速度请求模型
文章目录 前言一、加速度输出变量问题澄清二、配置Carsim动力学模型三、配置Carsim驾驶员模型四、添加VS Command代码五、Run Control联合仿真六、加速度模型效果验证 前言 1、自动驾驶行业中,算法端对于纵向控制的功能预留接口基本都是加速度,我们需要…...
结构体的进阶应用)
基于算法竞赛的c++编程(28)结构体的进阶应用
结构体的嵌套与复杂数据组织 在C中,结构体可以嵌套使用,形成更复杂的数据结构。例如,可以通过嵌套结构体描述多层级数据关系: struct Address {string city;string street;int zipCode; };struct Employee {string name;int id;…...
eNSP-Cloud(实现本地电脑与eNSP内设备之间通信)
说明: 想象一下,你正在用eNSP搭建一个虚拟的网络世界,里面有虚拟的路由器、交换机、电脑(PC)等等。这些设备都在你的电脑里面“运行”,它们之间可以互相通信,就像一个封闭的小王国。 但是&#…...
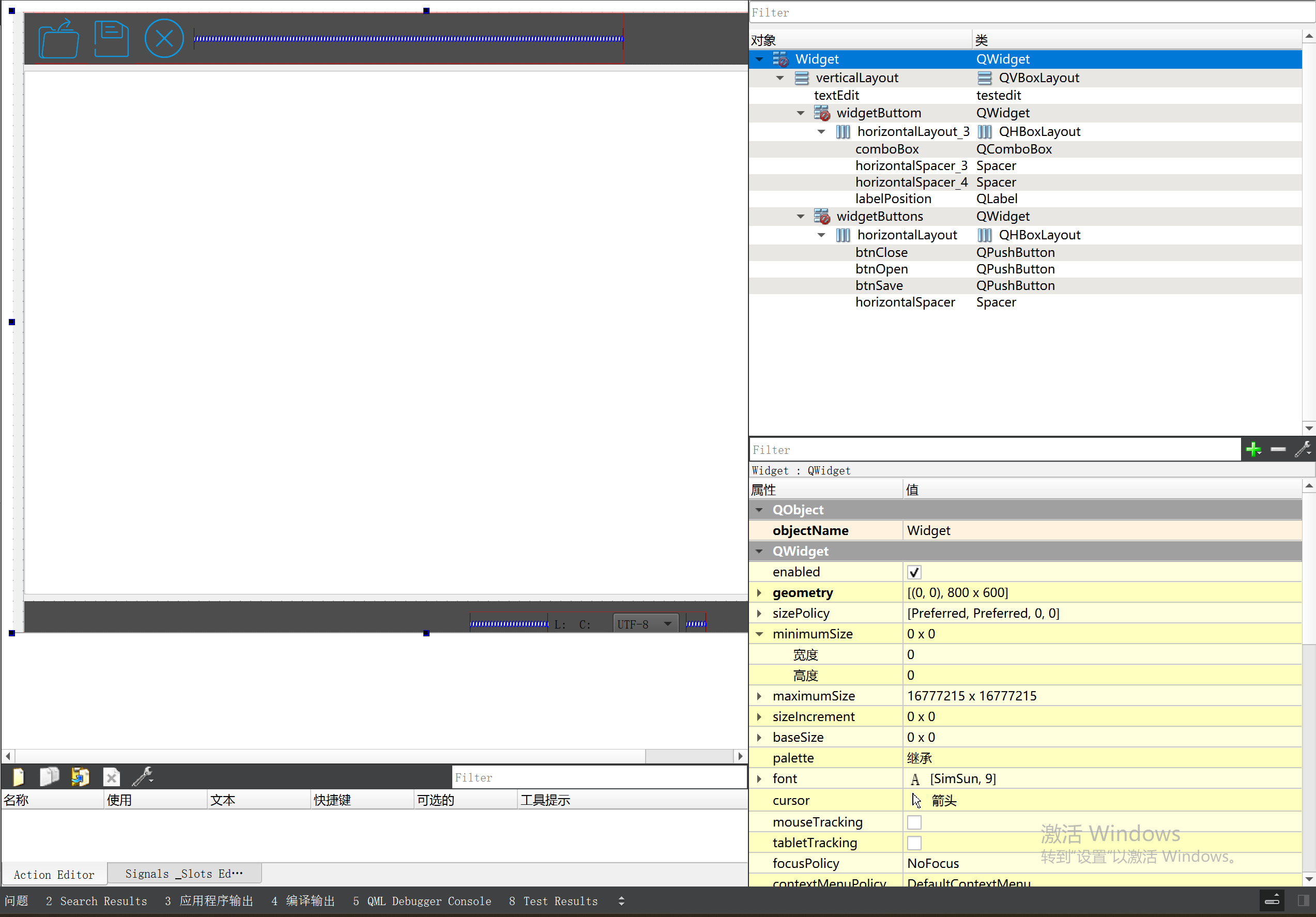
P3 QT项目----记事本(3.8)
3.8 记事本项目总结 项目源码 1.main.cpp #include "widget.h" #include <QApplication> int main(int argc, char *argv[]) {QApplication a(argc, argv);Widget w;w.show();return a.exec(); } 2.widget.cpp #include "widget.h" #include &q…...
BCS 2025|百度副总裁陈洋:智能体在安全领域的应用实践
6月5日,2025全球数字经济大会数字安全主论坛暨北京网络安全大会在国家会议中心隆重开幕。百度副总裁陈洋受邀出席,并作《智能体在安全领域的应用实践》主题演讲,分享了在智能体在安全领域的突破性实践。他指出,百度通过将安全能力…...
)
Java入门学习详细版(一)
大家好,Java 学习是一个系统学习的过程,核心原则就是“理论 实践 坚持”,并且需循序渐进,不可过于着急,本篇文章推出的这份详细入门学习资料将带大家从零基础开始,逐步掌握 Java 的核心概念和编程技能。 …...

CMake控制VS2022项目文件分组
我们可以通过 CMake 控制源文件的组织结构,使它们在 VS 解决方案资源管理器中以“组”(Filter)的形式进行分类展示。 🎯 目标 通过 CMake 脚本将 .cpp、.h 等源文件分组显示在 Visual Studio 2022 的解决方案资源管理器中。 ✅ 支持的方法汇总(共4种) 方法描述是否推荐…...

优选算法第十二讲:队列 + 宽搜 优先级队列
优选算法第十二讲:队列 宽搜 && 优先级队列 1.N叉树的层序遍历2.二叉树的锯齿型层序遍历3.二叉树最大宽度4.在每个树行中找最大值5.优先级队列 -- 最后一块石头的重量6.数据流中的第K大元素7.前K个高频单词8.数据流的中位数 1.N叉树的层序遍历 2.二叉树的锯…...
并发编程 - go版
1.并发编程基础概念 进程和线程 A. 进程是程序在操作系统中的一次执行过程,系统进行资源分配和调度的一个独立单位。B. 线程是进程的一个执行实体,是CPU调度和分派的基本单位,它是比进程更小的能独立运行的基本单位。C.一个进程可以创建和撤销多个线程;同一个进程中…...

省略号和可变参数模板
本文主要介绍如何展开可变参数的参数包 1.C语言的va_list展开可变参数 #include <iostream> #include <cstdarg>void printNumbers(int count, ...) {// 声明va_list类型的变量va_list args;// 使用va_start将可变参数写入变量argsva_start(args, count);for (in…...
PHP 8.5 即将发布:管道操作符、强力调试
前不久,PHP宣布了即将在 2025 年 11 月 20 日 正式发布的 PHP 8.5!作为 PHP 语言的又一次重要迭代,PHP 8.5 承诺带来一系列旨在提升代码可读性、健壮性以及开发者效率的改进。而更令人兴奋的是,借助强大的本地开发环境 ServBay&am…...