OpenCV实现FAST算法角点检测 、ORB算法特征点检测
目录
1 Fast算法
1.1 Fast算法原理
1.2 实现办法
1.2.1 机器学习的角点检测器
1.2.2 非极大值抑制
1.3 代码实现
1.4 结果展示
2 ,ORB算法
2.1代码实现
2.2 结果展示
1 Fast算法
1.1 Fast算法原理
1.2 实现办法

1.2.1 机器学习的角点检测器


1.2.2 非极大值抑制

1.3 代码实现


import cv2 as cv
import matplotlib.pyplot as plt
import numpy as np
from pylab import mplmpl.rcParams['font.sans-serif'] = ['SimHei']img = cv.imread("corner.png")#Fast 角点检测'''创建一个fast对象,传入阈值, 注意: 可以处理彩色空间图像'''
fast = cv.FastFeatureDetector_create(threshold=30)#检测图像上的关键点
kp = fast.detect(img , None)#在图像上绘制关键点
img2 = cv.drawKeypoints(img , kp , None ,color=(0,0,255))#输出默认参数
'''打印默认参数的值,包括阈值、是否使用非极大值抑制、邻域大小以及检测到的关键点数量'''
print("Threshold: {}".format(fast.getThreshold()))
print("nonmaxSuppression:{}".format(fast.getNonmaxSuppression()))
print("neighborhood: {}".format(fast.getType()))
print("Total Keypoints with nonmaxSuppression".format(len(kp)))# 关闭非极大值抑制
fast.setNonmaxSuppression(0)
kp = fast.detect(img , None)print("Total Keypoints without nonmaxSuppression :{}".format(len(kp)))#绘制未 加入 非极大值抑制的结果
img3 = cv.drawKeypoints(img , kp,None ,color=(0,0,255))#绘制图像
fig , axes = plt.subplots(nrows=1 , ncols=2,figsize=(5,4),dpi=100)
axes[0].imshow(img2[:,:,::-1])
axes[0].set_title("加入非极大值抑制")axes[1].imshow(img3[:,:,::-1])
axes[1].set_title("未加入非极大值抑制")
plt.show()1.4 结果展示


2 ,ORB算法









2.1代码实现


import cv2 as cv
import matplotlib.pyplot as plt
import numpy as np
from pylab import mplmpl.rcParams['font.sans-serif'] = ['SimHei']img = cv.imread("corner.png")#2 ORB算法角点检测
#2.1 实例化ORB对象
'''创建了一个ORB(Oriented FAST and Rotated BRIEF)特征检测器对象,并设置了最大特征点数为500。'''
orb = cv.ORB_create(nfeatures=500)#2.2 检测关键点,并计算特征描述符
kp , des = orb.detectAndCompute(img ,None)print(des.shape)
'''
orb.detectAndCompute()函数接受两个参数:图像(img)和掩码(None)。它将返回两个结果:关键点(kp)和描述子(des)。关键点(kp)是一个包含检测到的关键点信息的列表。每个关键点包含其在图像中的位置、尺度、方向等属性。描述子(des)是一个二维数组,形状为(N, 32),其中N是检测到的关键点数量。每一行代表一个关键点的描述子,描述子是一个长度为32的二进制向量。通过打印des.shape,可以输出描述子的形状。这里的输出表示检测到的关键点数量为N,每个关键点的描述子长度为32。'''#将关键点绘制在图像上
img2 = cv.drawKeypoints(img , kp ,None ,color=(0,0,255),flags=0)#绘制图像
plt.figure(figsize=(5,4),dpi=100)
plt.imshow(img2[:,:,::-1])
plt.xticks([]),plt.yticks([])
plt.show()2.2 结果展示

相关文章:
OpenCV实现FAST算法角点检测 、ORB算法特征点检测
目录 1 Fast算法 1.1 Fast算法原理 1.2 实现办法 1.2.1 机器学习的角点检测器 1.2.2 非极大值抑制 1.3 代码实现 1.4 结果展示 2 ,ORB算法 2.1代码实现 2.2 结果展示 1 Fast算法 1.1 Fast算法原理 1.2 实现办法 1.2.1 机器学习的角点检测器 1.2.2 …...
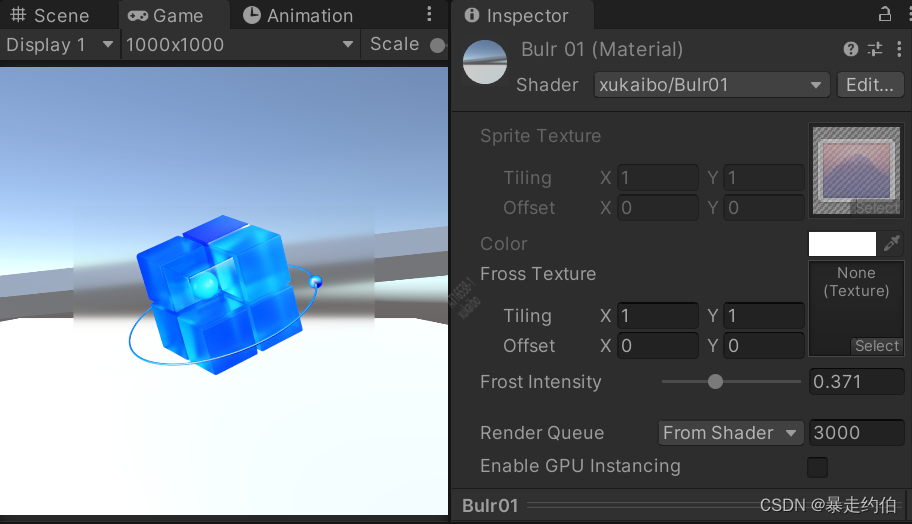
【Unity的 Built-in 渲染管线下实现好用的GUI模糊效果_Blur_案例分享(内附源码)】
CGPROGRAM实现好用的GUI模糊效果 实现Blur模糊方式1C#代码如下方式1_Shader代码如下实现Blur模糊方式2方式2_Shader如下实现Blur模糊方式1 其他的模糊效果,在这一篇。 效果如图: 新建一个C#文件,命名为"CommandBlur",打开C#,删除内容,复制粘贴下面的代码:…...
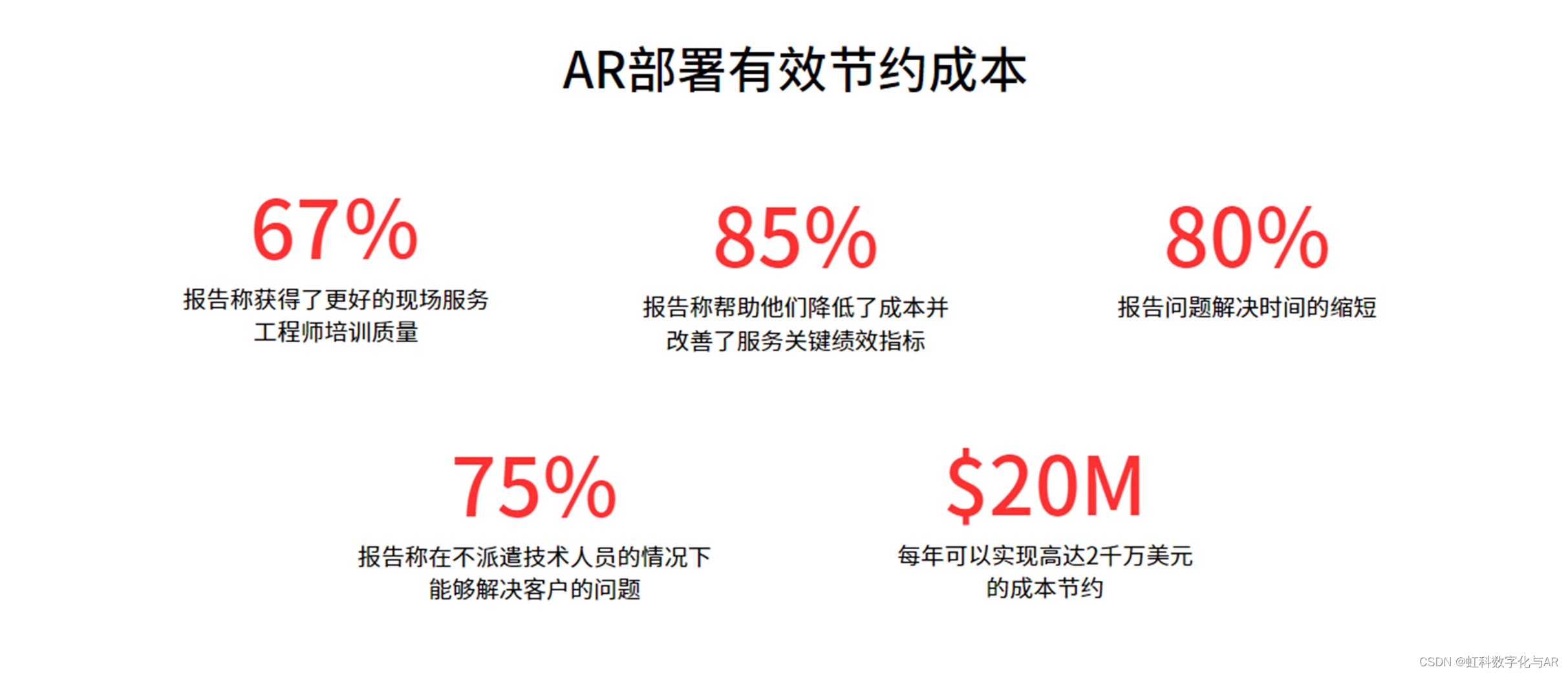
AR智能眼镜:提升现场服务技能、效率与盈利能力的利器(一)
随着技术的不断进步,现场服务组织正朝着远程支持转变,用以解决技能差距和生产力问题,提高员工培训和操作效率,同时为企业提高利润率,创造竞争优势。 本文将探讨增强现实(AR)、辅助现实…...

ChatGPT 在机器学习中的应用
办公室里一个机器人坐在人类旁边,Artstation 上的流行趋势,美丽的色彩,4k,充满活力,蓝色和黄色, DreamStudio出品 一、介绍 大家都知道ChatGPT。它在解释机器学习和深度学习概念方面也非常高效,…...

【JavaEE】锁策略
文章目录 前言1. 乐观锁和悲观锁2. 重量级锁和轻量级锁3. 自旋锁和挂起等待锁4. 公平锁和非公平锁5. 可重入锁和非可重入锁6. 读写锁Java synchronized 分别对应哪些锁策略1. 乐观锁和悲观锁2. 重量级锁和轻量级锁3. 自旋锁和挂起等待锁4. 公平锁和非公平锁5. 可重入锁和非可重…...

在 SDXL 上用 T2I-Adapter 实现高效可控的文生图
T2I-Adapter 是一种高效的即插即用模型,其能对冻结的预训练大型文生图模型提供额外引导。T2I-Adapter 将 T2I 模型中的内部知识与外部控制信号结合起来。我们可以根据不同的情况训练各种适配器,实现丰富的控制和编辑效果。 同期的 ControlNet 也有类似的…...
Python分支结构和循环结构
嗨喽~大家好呀,这里是魔王呐 ❤ ~! python更多源码/资料/解答/教程等 点击此处跳转文末名片免费获取 一.分支结构 分支结构是根据判断条件结果而选择不同向前路径的运行方式,分支结构分为:单分支,二分支和多分支。 1࿰…...

Unity调用API函数对系统桌面和窗口截图
Unity3D调用WINAPI函数对系统窗口截图 引入WINAPI函数调用WINAPI函数进行截图使用例子 引入WINAPI函数 using System; using System.Collections; using System.Runtime.InteropServices; using System.Drawing;[DllImport("user32.dll")]private static extern Int…...

【问题思考总结】CPU怎么访问磁盘?CPU只有32位,最多只能访问4GB的空间吗?
问题 在学习操作系统的时候发现了这样一个问题,32位的CPU寻址空间只有4GB,难道只有4GB的空间可以使用吗?以此为始,我开始了一些思考。 思考 Q1:首先,我似乎混淆了一个概念,内存和外存&#x…...
-CAM-根据刀具对程序组进行重新分组)
UG NX二次开发(C++)-CAM-根据刀具对程序组进行重新分组
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 1、前言2、在UG NX中创建一个三维模型3、在UG NX/CAM中创建多个加工程序4、采用UG NX二次开发(NXOpen)实现按照刀具分组程序组4.2 创建UI Styler4.1 实现逻辑4.2 生成的代码如下:4.3 测试效果4.…...

Unity如何实现TreeView
前言 最近有一个需求,需要实现一个TreeView的试图显示,开始我一直觉得这么通用的结构,肯定有现成的UI组件或者插件可以使用,结果,找了好久,都没有找到合适的插件,有两个效果差强人意。 最后在回家的路上突然灵光一闪,想到了一种简单的实现方式,什么插件都不用,仅使用…...

Android widget 小部件使用指南强化版
Android widget 小部件使用指南强化版 一、简单UI的小部件二、含集合的小部件三、可配置的小部件四、可控制的小部件五、Android 12 Widget 更新 小部件是主屏幕定制的一个重要方面。您可以将它们视为应用程序最重要的数据和功能的“概览”视图,这些数据和功能可以直…...
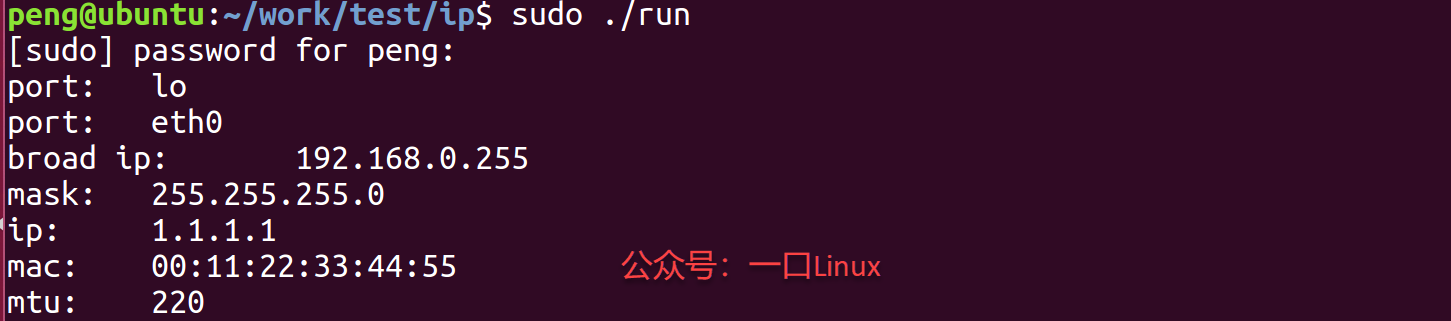
Linux下C语言操作网卡的几个代码实例?特别实用
前面写了一篇关于网络相关的文章:如何获取当前可用网口。 《简简单单教你如何用C语言列举当前所有网口!》 那么如何使用C语言直接操作网口? 比如读写IP地址、读写MAC地址等。 一、原理 主要通过系统用socket()、ioctl()、实现 int sock…...

noip2011选择旅馆
1.审题:第一个人与第二个人入住的旅馆要求是同色的; 两个人去消费的旅馆并没有要求与入住的旅馆是同色的(这点要小心) 2.要求记录以下数据: 1)a[color]表示当前同为颜色color的旅馆数 2)b[co…...

vue造轮子完整指南--npm组件包开发步骤
一、项目包文件的创建和初始化。 1. 新建项目包。 vue create <Project Name> //用于发布npm包的项目文件名 ps:一般选择自定义,然后不需要Vuex和Router,其他选项按自己实际情况选择安装即可。 2.修改原始src文件名、新增组件项目存放文件和修改…...
28 drf-Vue个人向总结-1
文章目录 前后端分离开发展示项目项补充知识开发问题浏览器解决跨域问题 drf 小tips设置资源root目录使用自定义的user表设置资源路径media数据库补充删除表中数据单页面与多页面模式过滤多层自关联后端提交的数据到底是什么jwt token登录设置普通的 token 原理使用流程解析 jw…...

线性代数(七) 矩阵分析
前言 从性线变换我们得出,矩阵和函数是密不可分的。如何用函数的思维来分析矩阵。 矩阵的序列 通过这个定义我们就定义了矩阵序列的收敛性。 研究矩阵序列收敛性的常用方法,是用《常见向量范数和矩阵范数》来研究矩阵序列的极限。 长度是范数的一个特…...
myArm 全新七轴桌面型机械臂
引言 在不断演进的科技世界中,我们始终追求创新和卓越,以满足客户的需求并超越他们的期望。今天,我们很高兴地宣布我们的最新产品——myArm 300 Pi,一款七轴的桌面型机械臂。这款产品的独特之处在于其灵活性和可编程性,…...

tomcat乱码解决
解决乱码 1、修改bin\catalina.bat配置文件 修改tomcat的配置文件,找到tomcat路径下的\bin目录下的catalina.bat文件,修改 set “JAVA_OPTS%JAVA_OPTS% %JSSE_OPTS% -Dfile.encodingUTF-8 -Dsun.jnu.encodingUTF-8 ” 2、修改conf\logging.properties配置…...
【Linux】详解线程第三篇——线程同步和生产消费者模型
线程同步和生消模型 前言正式开始再次用黄牛抢票来讲解线程同步的思想通过条件变量来实现线程同步条件变量接口介绍初始化和销毁pthread_cond_waitsignal和broadcast 生产消费者模型三种关系用基本工程师思维再次理解基于生产消费者模型的阻塞队列版本一版本二多生多消 利用RAI…...

[2025CVPR]DeepVideo-R1:基于难度感知回归GRPO的视频强化微调框架详解
突破视频大语言模型推理瓶颈,在多个视频基准上实现SOTA性能 一、核心问题与创新亮点 1.1 GRPO在视频任务中的两大挑战 安全措施依赖问题 GRPO使用min和clip函数限制策略更新幅度,导致: 梯度抑制:当新旧策略差异过大时梯度消失收敛困难:策略无法充分优化# 传统GRPO的梯…...
深入理解JavaScript设计模式之单例模式
目录 什么是单例模式为什么需要单例模式常见应用场景包括 单例模式实现透明单例模式实现不透明单例模式用代理实现单例模式javaScript中的单例模式使用命名空间使用闭包封装私有变量 惰性单例通用的惰性单例 结语 什么是单例模式 单例模式(Singleton Pattern&#…...

第 86 场周赛:矩阵中的幻方、钥匙和房间、将数组拆分成斐波那契序列、猜猜这个单词
Q1、[中等] 矩阵中的幻方 1、题目描述 3 x 3 的幻方是一个填充有 从 1 到 9 的不同数字的 3 x 3 矩阵,其中每行,每列以及两条对角线上的各数之和都相等。 给定一个由整数组成的row x col 的 grid,其中有多少个 3 3 的 “幻方” 子矩阵&am…...

Swagger和OpenApi的前世今生
Swagger与OpenAPI的关系演进是API标准化进程中的重要篇章,二者共同塑造了现代RESTful API的开发范式。 本期就扒一扒其技术演进的关键节点与核心逻辑: 🔄 一、起源与初创期:Swagger的诞生(2010-2014) 核心…...

2023赣州旅游投资集团
单选题 1.“不登高山,不知天之高也;不临深溪,不知地之厚也。”这句话说明_____。 A、人的意识具有创造性 B、人的认识是独立于实践之外的 C、实践在认识过程中具有决定作用 D、人的一切知识都是从直接经验中获得的 参考答案: C 本题解…...
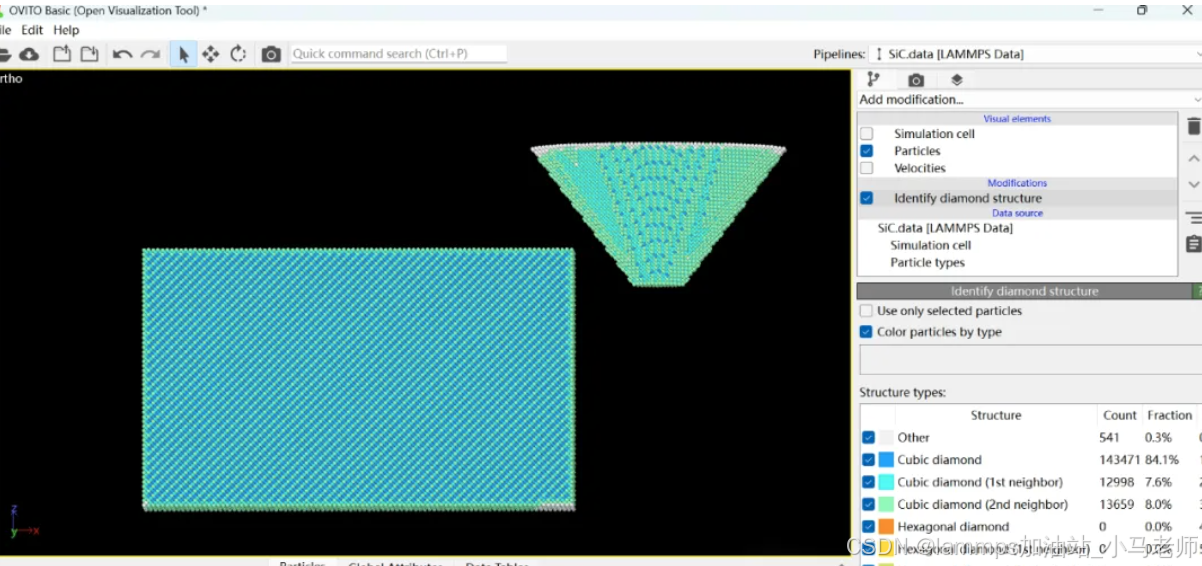
Python Ovito统计金刚石结构数量
大家好,我是小马老师。 本文介绍python ovito方法统计金刚石结构的方法。 Ovito Identify diamond structure命令可以识别和统计金刚石结构,但是无法直接输出结构的变化情况。 本文使用python调用ovito包的方法,可以持续统计各步的金刚石结构,具体代码如下: from ovito…...
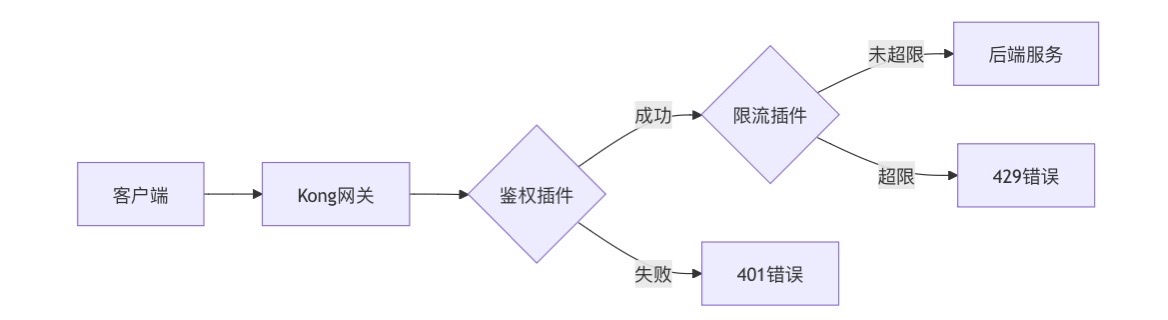
云原生安全实战:API网关Kong的鉴权与限流详解
🔥「炎码工坊」技术弹药已装填! 点击关注 → 解锁工业级干货【工具实测|项目避坑|源码燃烧指南】 一、基础概念 1. API网关(API Gateway) API网关是微服务架构中的核心组件,负责统一管理所有API的流量入口。它像一座…...

JavaScript 数据类型详解
JavaScript 数据类型详解 JavaScript 数据类型分为 原始类型(Primitive) 和 对象类型(Object) 两大类,共 8 种(ES11): 一、原始类型(7种) 1. undefined 定…...

scikit-learn机器学习
# 同时添加如下代码, 这样每次环境(kernel)启动的时候只要运行下方代码即可: # Also add the following code, # so that every time the environment (kernel) starts, # just run the following code: import sys sys.path.append(/home/aistudio/external-libraries)机…...

Web中间件--tomcat学习
Web中间件–tomcat Java虚拟机详解 什么是JAVA虚拟机 Java虚拟机是一个抽象的计算机,它可以执行Java字节码。Java虚拟机是Java平台的一部分,Java平台由Java语言、Java API和Java虚拟机组成。Java虚拟机的主要作用是将Java字节码转换为机器代码&#x…...