【无人机】回波状态网络(ESN)在固定翼无人机非线性控制中的应用(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
无人机为执行各种军事和民用任务提供了平台。这包括情报、监视和侦察( ISR )、战场损伤评估和部队保护等军事应用。民用应用包括遥感、科学研究、搜救任务、边境巡逻、受灾地区监测、航空摄影、航空测绘岩土工程、植被生长分析、农作物除尘、精准农业、地形变化评估等。无人机产业是航天工业中发展最快的部门,民用无人机的使用也在显著增长。据估计,在未来十年中,无人机的支出将从目前全世界每年52亿美元的支出翻一番。一旦技术成熟,将无人机集成到国家空间系统( NAS )中,本文是为无人机开发自适应飞行控制器。包括多层感知器( MLP )和回声状态网络( ESN )。MLP用于离线模型,而ESN用于在线模型。MLP将成为焦点,因为它的自适应和循环行为允许它自然地坚持经典控制律,并完成反馈回路。ESN采用有监督的时序方法进行机器学习。这使得它成为解决诸如飞行控制器等动态系统问题的备选方案。MLP将主要用于误差校正。ESN是稀疏连接的,隐藏层有12个神经元,具有单一的输入和输出信号。隐藏层充当一个储液器,因为它表现出电流已知的40 %泄漏率。详细文章讲解见第4部分。

📚2 运行结果

部分代码:
% NSF Twin Engine Doublet Data
clc
clear
% Read log file
Data = xlsread('Fri May 24 14-54-11 2013e.xlsx');
% Read in time (ms)
t = Data(:,1)-27081;
% Convert milli seconds to seconds
tsec = t./1000;
% Convert seconds to minutes
tmin = tsec./60;
% Determine the point at which 1 Hz recording to 10 Hz recording
tdiff = diff(tsec);
%Change time set to only contain 10 Hz data
tsec2 = tsec(829:4557);
%Roll Rate
P = Data(:,32).*(180/pi());
Pflight = P(829:4557);
% Pitch Rate
Q = Data(:,33).*(180/pi());
Qflight = Q(829:4557);
% Yaw Rate
R = Data(:,34).*(180/pi());
Rflight = R(829:4557);
% Roll
Roll = Data(:,38).*(180/pi());
Roll_flight = Roll(829:4557);
% Pitch
Pitch = Data(:,39).*(180/pi());
Pitch_flight = Pitch(829:4557);
% Yaw
Yaw = Data(:,40).*(180/pi());
Yaw_flight = Yaw(829:4557);
% Acknowledgement Ratio
AckRatio = Data(:,49);
AckRatio_flight = AckRatio(829:4557);
% RSSI
RSSI = Data(:,50);
RSSI_flight = RSSI(829:4557);
% Surface 0
% Aileron
Surface0 = Data(:,51);
Sur0_flight = Surface0(829:4557).*(180/pi());
% Looking for constant surface deflection
Aileron1_diff = diff(Sur0_flight);
% Surface 1
% Elevator
Surface1 = Data(:,52).*(180/pi());
Sur1_flight = Surface1(829:4557);
% Looking for constant surface deflection
Elevator1_diff = diff(Sur1_flight);
% Surface 2
% Throttle
Surface2 = Data(:,53);
Sur2_flight = Surface2(829:4557);
% Looking for constant surface deflection
Throttle1_diff = diff(Sur2_flight);
% Surface 3
Surface3 = Data(:,54).*(180/pi());
Sur3_flight = Surface3(829:4557);
% Looking for constant surface deflection
Sur3_diff = diff(Sur3_flight);
% Surface 4
Surface4 = Data(:,55).*(180/pi());
Sur4_flight = Surface4(829:4557);
% Looking for constant surface deflection
Sur4_diff = diff(Sur3_flight);
% Surface 5
% Aileron
Surface5 = Data(:,56).*(180/pi());
Sur5_flight = Surface5(829:4557);
% Looking for constant surface deflection
Aileron2_diff = diff(Sur5_flight);
% Surface 6
% Elevator
Surface6 = Data(:,57).*(180/pi());
Sur6_flight = Surface6(829:4557);
% Looking for constant surface deflection
Elevator2_diff = diff(Sur6_flight);
% Surface 7
% Throttle
Surface7 = Data(:,58);
Sur7_flight = Surface7(829:4557);
% Looking for constant surface deflection
Throttle2_diff = diff(Sur7_flight);
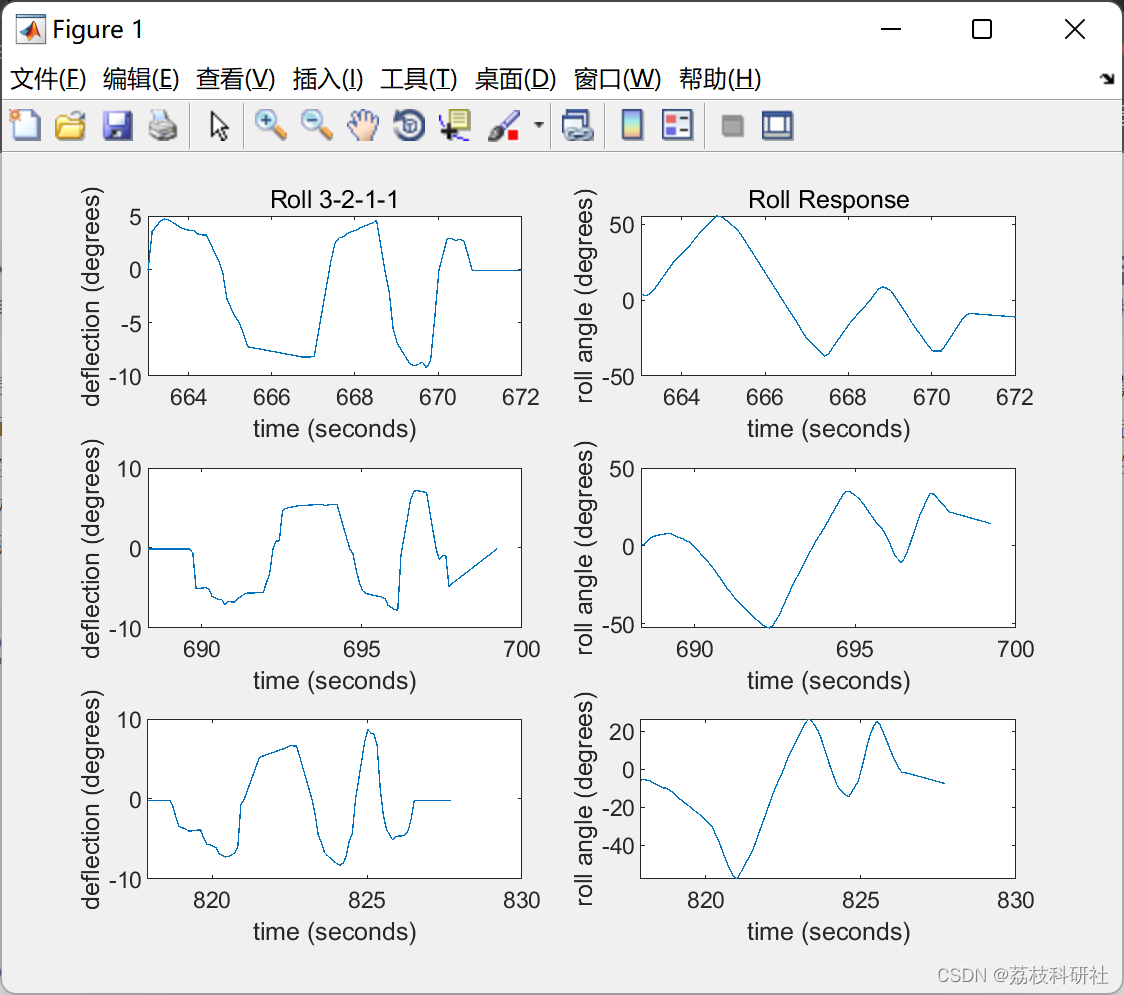
% Roll 3-2-1-1
% 1567-1624 No Elevator Movement
subplot(3,2,1)
plot(tsec2(1567:1624),Sur0_flight(1567:1624))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
title('Roll 3-2-1-1')
subplot(3,2,2)
plot(tsec2(1567:1624),Roll_flight(1567:1624))
title('Roll Response')
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
% 1733-1805 No Elevator Movement
subplot(3,2,3)
plot(tsec2(1733:1805),Sur0_flight(1733:1805))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
subplot(3,2,4)
plot(tsec2(1733:1805),Roll_flight(1733:1805))
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
% 2563-2628 No Elevator Movement
subplot(3,2,5)
plot(tsec2(2563:2628),Sur0_flight(2563:2628))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
subplot(3,2,6)
plot(tsec2(2563:2628),Roll_flight(2563:2628))
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
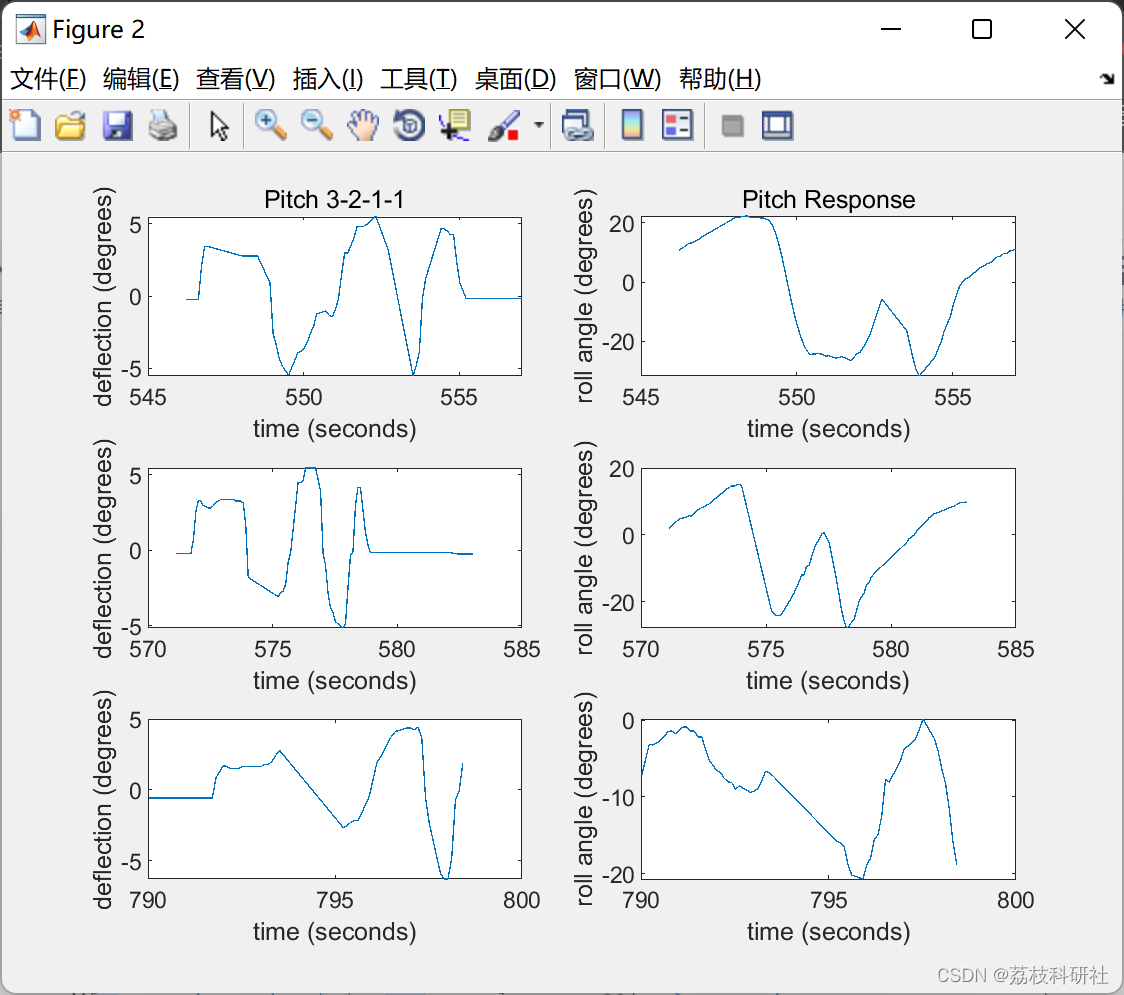
% Pitch 3-2-1-1
% 908 - 980 No Aileron Movement
figure
subplot(3,2,1)
plot(tsec2(908:980),Sur1_flight(908:980))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
title('Pitch 3-2-1-1')
subplot(3,2,2)
plot(tsec2(908:980),Pitch_flight(908:980))
title('Pitch Response')
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
% 1068 - 1148 No Aileron Movement
subplot(3,2,3)
plot(tsec2(1068:1148),Sur1_flight(1068:1148))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
subplot(3,2,4)
plot(tsec2(1068:1148),Pitch_flight(1068:1148))
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
% 2380 - 2437 No Aileron Movement
subplot(3,2,5)
plot(tsec2(2380:2437),Sur1_flight(2380:2437))
xlabel('time (seconds)')
ylabel('deflection (degrees)')
subplot(3,2,6)
plot(tsec2(2380:2437),Roll_flight(2380:2437))
xlabel('time (seconds)')
ylabel('roll angle (degrees)')
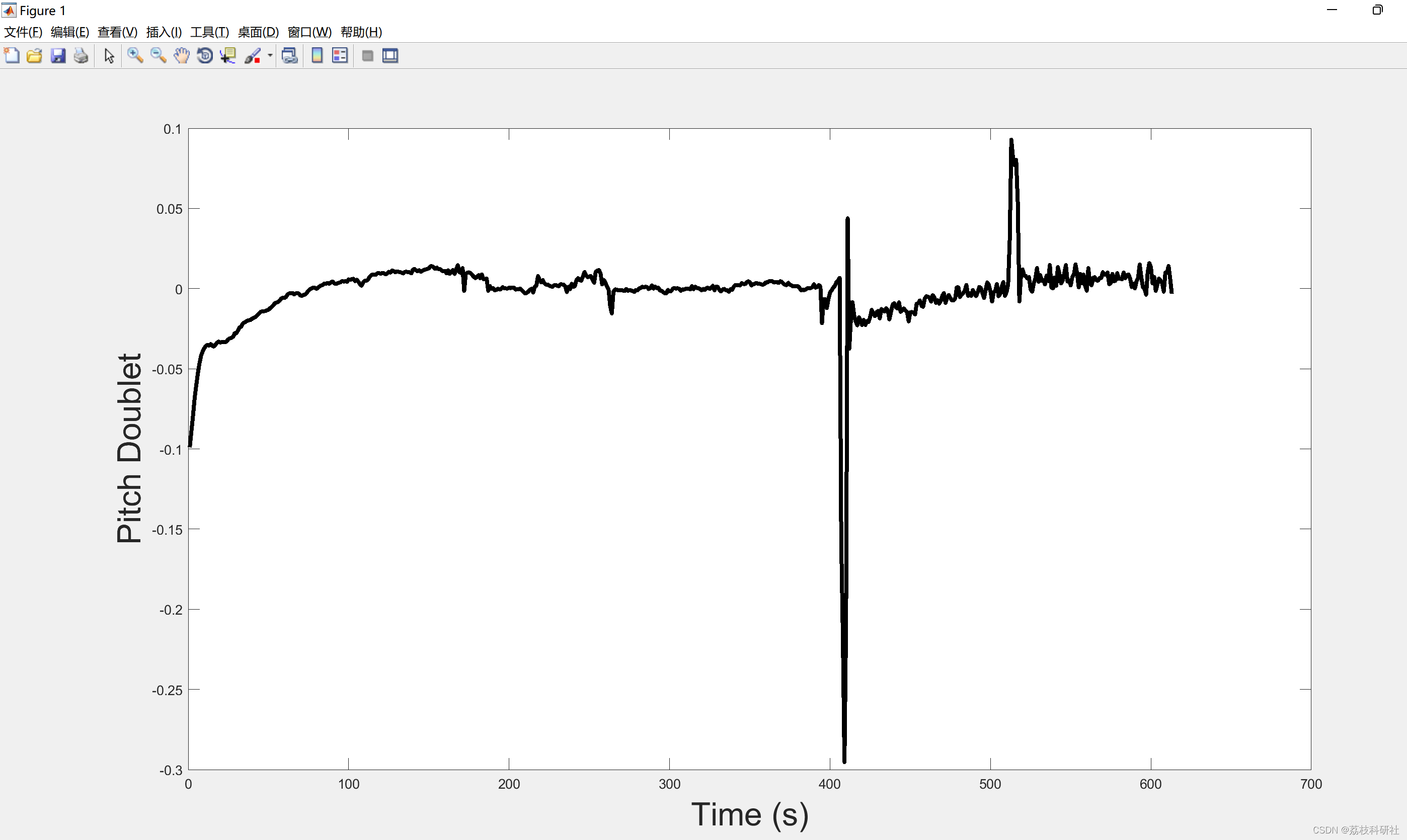
figure (3), subplot(2,1,1),plot(tsec2(1567:1624),Sur0_flight(1567:1624),'k-','linewidth',3)
grid
ylabel('Aileron (deg)','fontsize',25)
title('Roll Doublet','fontsize',25),set(gca,'fontsize',25)
subplot(2,1,2),plot(tsec2(1567:1624),Roll_flight(1567:1624),'k-','linewidth',3)
ylabel('Roll Angle (deg)','fontsize',25),grid,set(gca,'fontsize',25)
xlabel('Time (sec)')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。

🌈4 Matlab代码实现
相关文章:
【无人机】回波状态网络(ESN)在固定翼无人机非线性控制中的应用(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

YAML 文件简介
简介 我们在安装 kubernetes 集群的时候使用了一些 YAML 文件来创建相关的资源,但是对 YAML 文件还是非常陌生。所以我们先来简单看一看 YAML 文件是如何工作的,并使用 YAML 文件来定义一个 kubernetes pod,然后再来定义一个 kubernetes dep…...
Python四大主题之一【 Web】 编程框架
目前Python的网络编程框架已经多达几十个,逐个学习它们显然不现实。但这些框架在系统架构和运行环境中有很多共通之处,本文带领读者学习基于Python网络框架开发的常用知识,及目前的4种主流Python网络框架:Django、Tornado、Flask、Twisted。 …...
【C++】哈希表
1. unordered系列关联式容器 在C98中,STL提供了底层为红黑树结构的一系列关联式容器,在查询时效率可达到 ,即最差情况下需要比较红黑树的高度次,当树中的节点非常多时,查询效率也不理想。最好的查询是,进行…...
深度学习入门(六十七)循环神经网络——注意力机制
深度学习入门(六十七)循环神经网络——注意力机制前言循环神经网络——注意力机制课件心理学注意力机制注意力机制是显式地考虑随意线索非参注意力池化层Nadaraya-Watson 核回归:总结教材(注意力提示)1 生物学中的注意…...
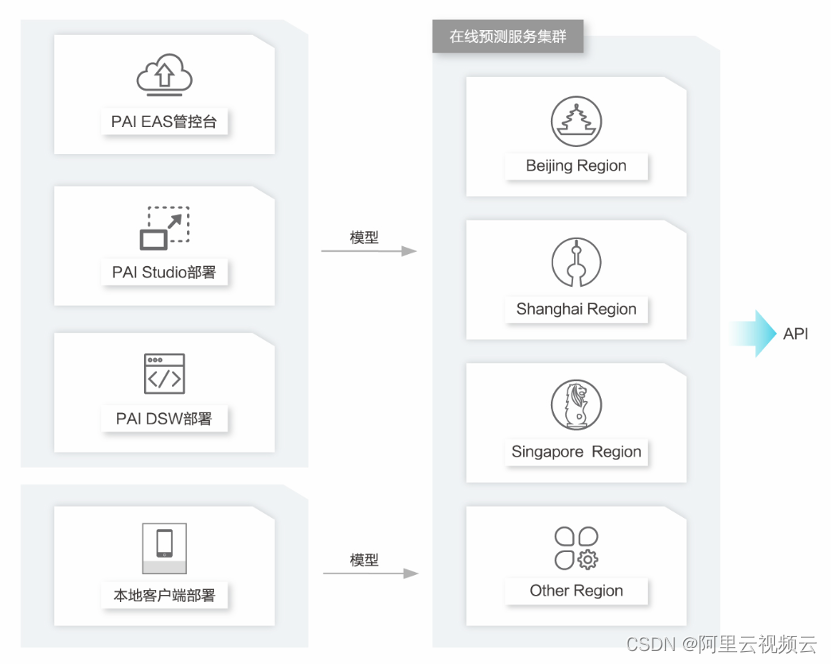
阿里云云通信风控系统的架构与实践
作者:铭杰 阿里云云通信创立于 2017 年,历经 5 年发展已经孵化出智能消息、智能语音、隐私号、号码百科等多个热门产品。目前,已成为了国内云通信市场的领头羊,在国际市场上服务范围也覆盖了 200 多个国家。随着业务的不断壮大&am…...

【性能测试】loadrunner(一)知识准备
【性能测试】loadrunner(一)知识准备 目录:导读 1.0. 前言 1.1 性能测试术语介绍 1.2 性能测试分类 1.3 HTTP我们需要知道的 1.4 Loadrunner 12.55安装 1.0. 前言 在性能测试中,牵扯到了许多比较杂的知识点,…...
【Vue3源码】第五章 ref的原理 实现ref
【Vue3源码】第五章 ref的原理 实现ref 上一章节我们实现了reactive 和 readonly 嵌套对象转换功能,以及shallowReadonly 和isProxy几个简单的API。 这一章我们开始实现 ref 及其它配套的isRef、unRef 和 proxyRefs 1、实现ref 接受一个内部值,返回一…...
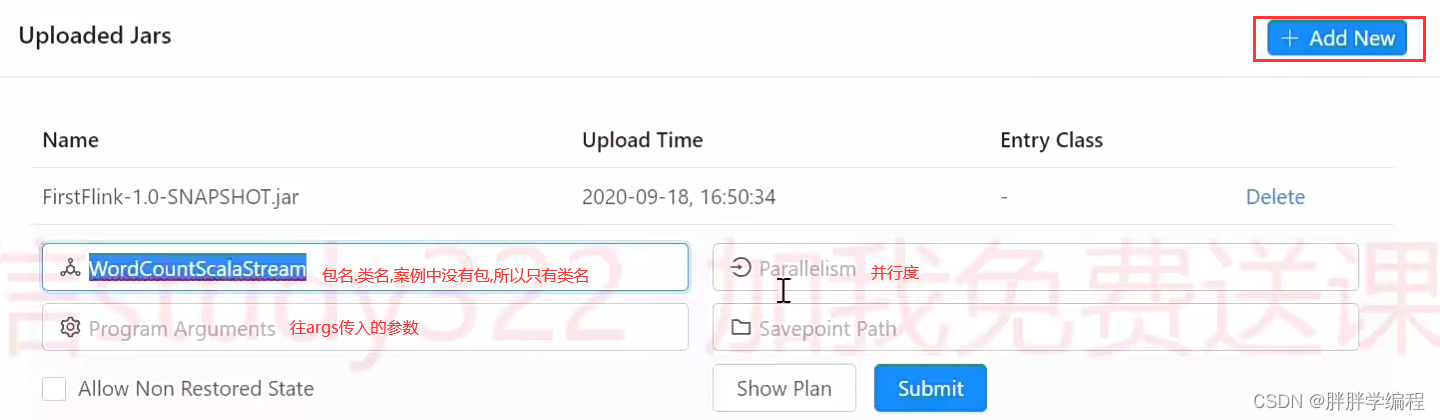
[Flink]部署模式(看pdf上的放上面)
运行一个wordcountval dataStream: DataStream[String] environment.socketTextStream("hadoop1", 7777) //流式数据不能进行groupBy,流式数据要来一条处理一次.0表示第一个元素,1表示第二个元素 //keyBy(0)根据第一个元素进行分组 val out: DataStream[(String, In…...

Linux 查看 CPU 信息,机器型号,内存等信息
平时用的可能少,但需要记住,使用的命令,转载https://my.oschina.net/hunterli/blog/140783,以记录学习 系统 # uname -a # 查看内核/操作系统/CPU信息 # head -n 1 /etc/issue # 查看操作系统版本 # cat /proc/…...
)
三维量子力学 量子力学(3)
动量ppp有三个分量,为pxp_xpx等。它们分别满足与位置坐标的对易关系,比如px−iℏ∂∂xp_x-i\hbar\frac{\partial }{\partial x}px−iℏ∂x∂。可以用位置坐标梯度算符表示即p−iℏ∇\bm{p}-i\hbar\nablap−iℏ∇。位置矢量用r\bm{r}r表示。 在d3r…...

Blazor入门100天 : 身份验证和授权 (6) - 使用 FreeSql orm 管理ids数据
目录 建立默认带身份验证 Blazor 程序角色/组件/特性/过程逻辑DB 改 Sqlite将自定义字段添加到用户表脚手架拉取IDS文件,本地化资源freesql 生成实体类,freesql 管理ids数据表初始化 Roles,freesql 外键 > 导航属性完善 freesql 和 bb 特性 本节源码 https://github.com/…...

Java文件IO操作:File类的相关内容
Java文件IO操作一、File类1.相对路径和绝对路径2.路径分隔符(同一路径下、多个路径下)3.实例化4.常见方法一、File类 File类继承自Object类,实现了Serializable接口和Comparable接口; File类属于java.io包; File类是文…...
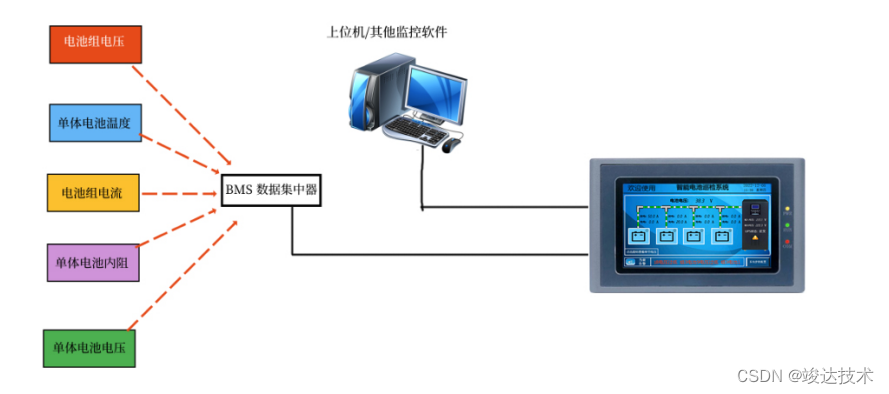
竣达技术 | 巡检触摸屏配合电池柜,电池安全放首位!
机房蓄电池常见的故障 1.机房电池着火和爆炸 目前在数据机房蓄电池爆炸着火事故频发,导致业主损失严重。一般机房电池是由于其中一节电池裂化后未妥善管理,电池急剧恶化导致爆炸着火。由于电池是串联及并联在使用,只要一节着火燃烧整片瞬间…...

什么是自动化运维?为什么选择Python做自动化运维?
“Python自动化运维”这个词,想必大家都听说过,但是很多人对它并不了解,也不知道是做什么的,那么你对Python自动化运维了解多少呢?跟着蛋糕往下看。 什么是Python自动化运维? 随着技术的进步、业务需求的快速增长,…...

【经验】移植环境requirement时报错
问题描述 在使用pip freeze > ./requirements.txt和pip install -r requirement.txt (requirements.txt文件用来记录当前程序的所有依赖包及其精确版本号)从一台电脑移植到另一台电脑的 conda 环境时,出现了一堆类似的报错: E…...
计算机专业要考什么证书?
大家好,我是良许。 从去年 12 月开始,我已经在视频号、抖音等主流视频平台上连续更新视频到现在,并得到了不错的评价。 视频 100% 原创录制,绝非垃圾搬运号,每个视频都花了很多时间精力用心制作,欢迎大家…...

一个列表引发的思考(简单版)
最近老板让我按照设计图写一个页面,不嫌丢人的说这是我第一次写页面,哈哈哈。 然后设计图里有一个这样的需求,感觉挺有意思的。 为什么感觉有意思呢,因为这个列表它前面是图片,然后单行和双行的不一样。(请…...
Unity C#中的序列化与反序列化)
Protobuf 学习简记(三)Unity C#中的序列化与反序列化
Protobuf 学习简记(三)Unity C#中的序列化与反序列化对文本的序列化与反序列化内存二进制流的序列化与反序列化方法一方法二参考链接对文本的序列化与反序列化 private void Text() {TestMsg1 myTestMsg new TestMsg1();myTestMsg.TestInt32 1;myTest…...
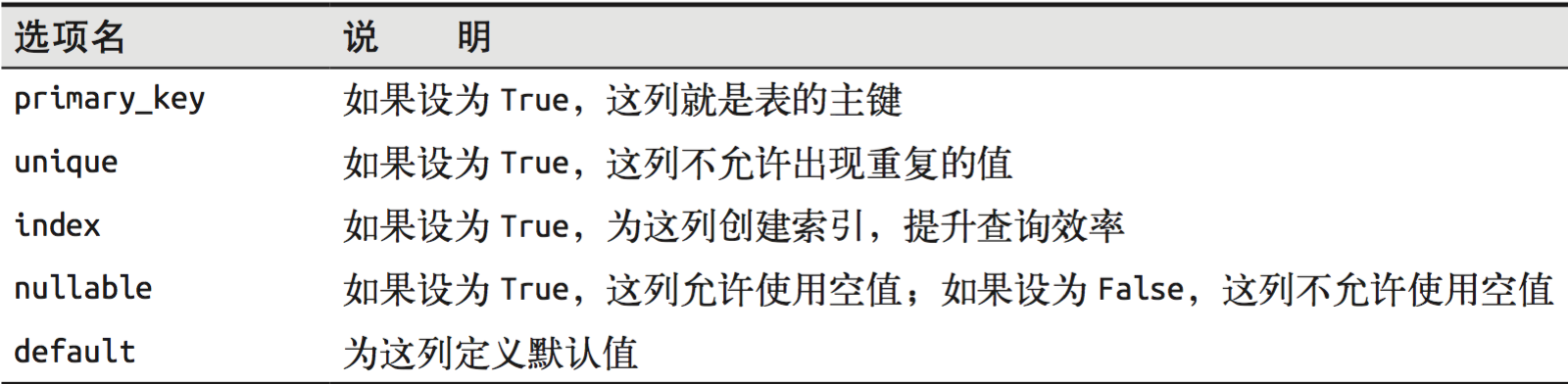
Flask入门(10):Flask使用SQLAlchemy
目录11.SQLAlchemy11.1 简介11.2 安装11.3 基本使用11.4 连接11.5 数据类型11.6 执行原生sql11.7 插入数据11. 8 删改操作11.9 查询11.SQLAlchemy 11.1 简介 SQLAlchemy的是Python的SQL工具包和对象关系映射,给应用程序开发者提供SQL的强大功能和灵活性。它提供了…...
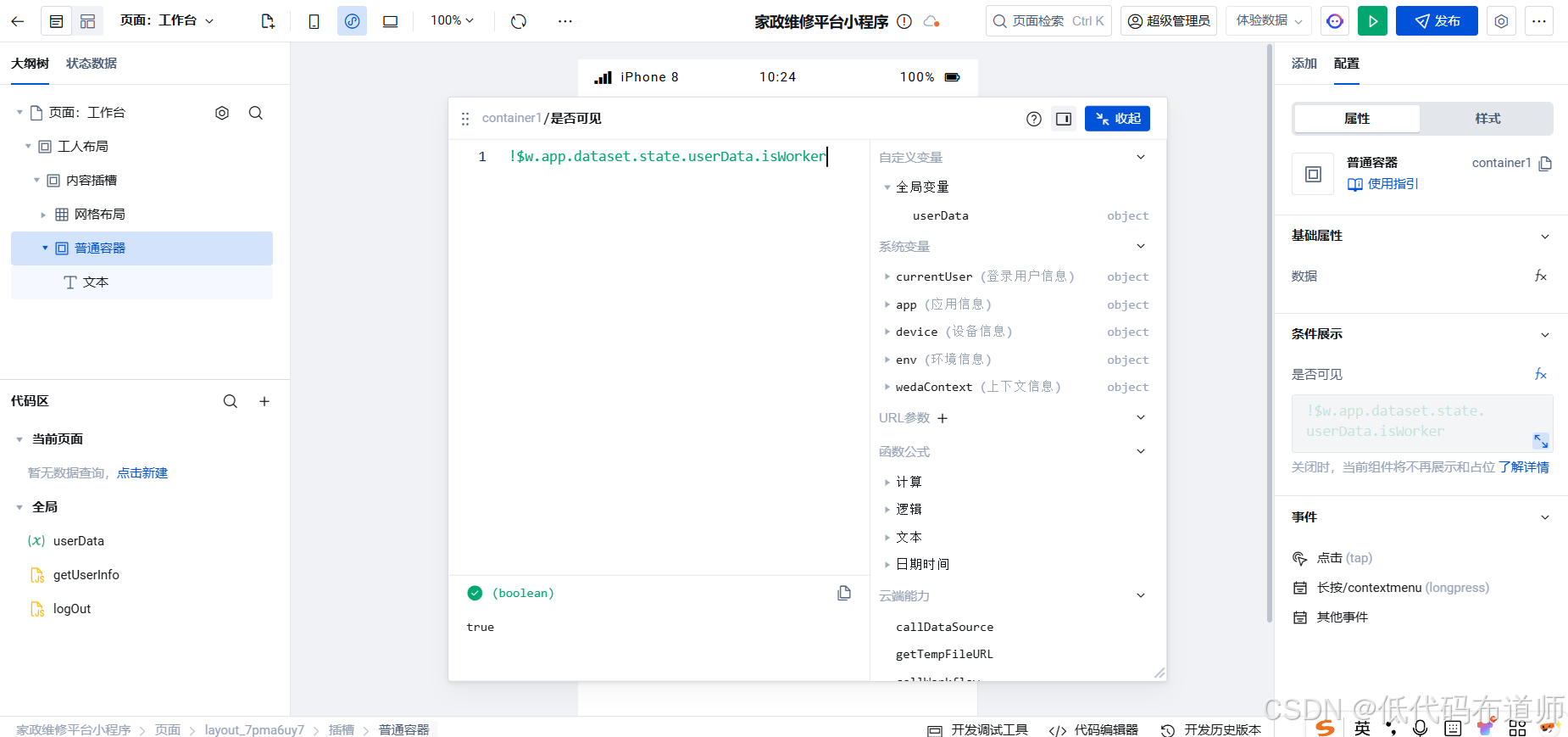
家政维修平台实战20:权限设计
目录 1 获取工人信息2 搭建工人入口3 权限判断总结 目前我们已经搭建好了基础的用户体系,主要是分成几个表,用户表我们是记录用户的基础信息,包括手机、昵称、头像。而工人和员工各有各的表。那么就有一个问题,不同的角色…...

macOS多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用
文章目录 问题现象问题原因解决办法 问题现象 macOS启动台(Launchpad)多出来了:Google云端硬盘、YouTube、表格、幻灯片、Gmail、Google文档等应用。 问题原因 很明显,都是Google家的办公全家桶。这些应用并不是通过独立安装的…...

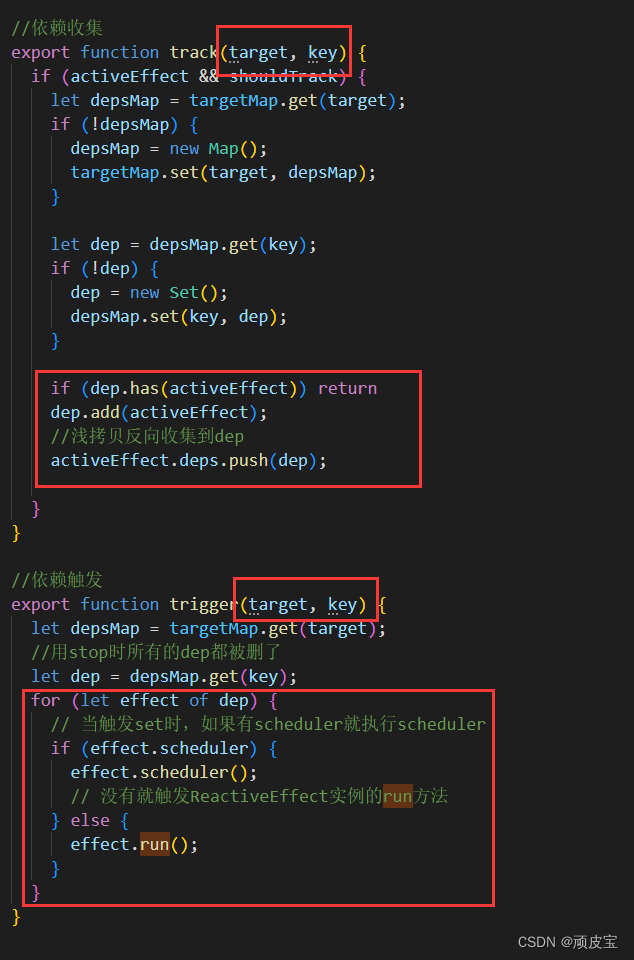
论文浅尝 | 基于判别指令微调生成式大语言模型的知识图谱补全方法(ISWC2024)
笔记整理:刘治强,浙江大学硕士生,研究方向为知识图谱表示学习,大语言模型 论文链接:http://arxiv.org/abs/2407.16127 发表会议:ISWC 2024 1. 动机 传统的知识图谱补全(KGC)模型通过…...
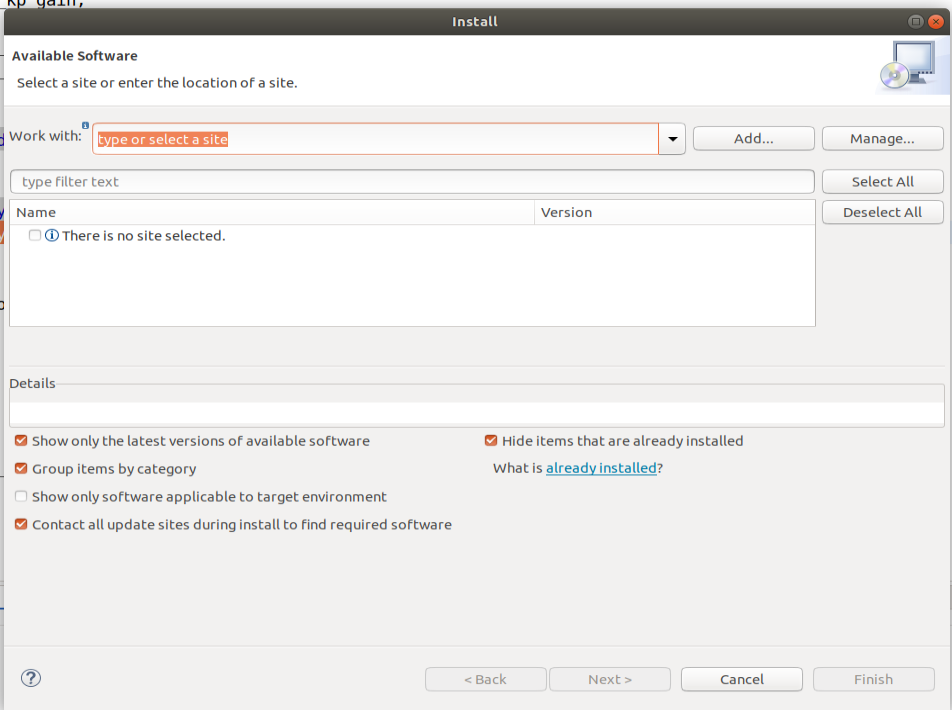
ardupilot 开发环境eclipse 中import 缺少C++
目录 文章目录 目录摘要1.修复过程摘要 本节主要解决ardupilot 开发环境eclipse 中import 缺少C++,无法导入ardupilot代码,会引起查看不方便的问题。如下图所示 1.修复过程 0.安装ubuntu 软件中自带的eclipse 1.打开eclipse—Help—install new software 2.在 Work with中…...
Unsafe Fileupload篇补充-木马的详细教程与木马分享(中国蚁剑方式)
在之前的皮卡丘靶场第九期Unsafe Fileupload篇中我们学习了木马的原理并且学了一个简单的木马文件 本期内容是为了更好的为大家解释木马(服务器方面的)的原理,连接,以及各种木马及连接工具的分享 文件木马:https://w…...
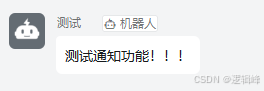
DingDing机器人群消息推送
文章目录 1 新建机器人2 API文档说明3 代码编写 1 新建机器人 点击群设置 下滑到群管理的机器人,点击进入 添加机器人 选择自定义Webhook服务 点击添加 设置安全设置,详见说明文档 成功后,记录Webhook 2 API文档说明 点击设置说明 查看自…...

android13 app的触摸问题定位分析流程
一、知识点 一般来说,触摸问题都是app层面出问题,我们可以在ViewRootImpl.java添加log的方式定位;如果是touchableRegion的计算问题,就会相对比较麻烦了,需要通过adb shell dumpsys input > input.log指令,且通过打印堆栈的方式,逐步定位问题,并找到修改方案。 问题…...

日常一水C
多态 言简意赅:就是一个对象面对同一事件时做出的不同反应 而之前的继承中说过,当子类和父类的函数名相同时,会隐藏父类的同名函数转而调用子类的同名函数,如果要调用父类的同名函数,那么就需要对父类进行引用&#…...
android RelativeLayout布局
<?xml version"1.0" encoding"utf-8"?> <RelativeLayout xmlns:android"http://schemas.android.com/apk/res/android"android:layout_width"match_parent"android:layout_height"match_parent"android:gravity&…...
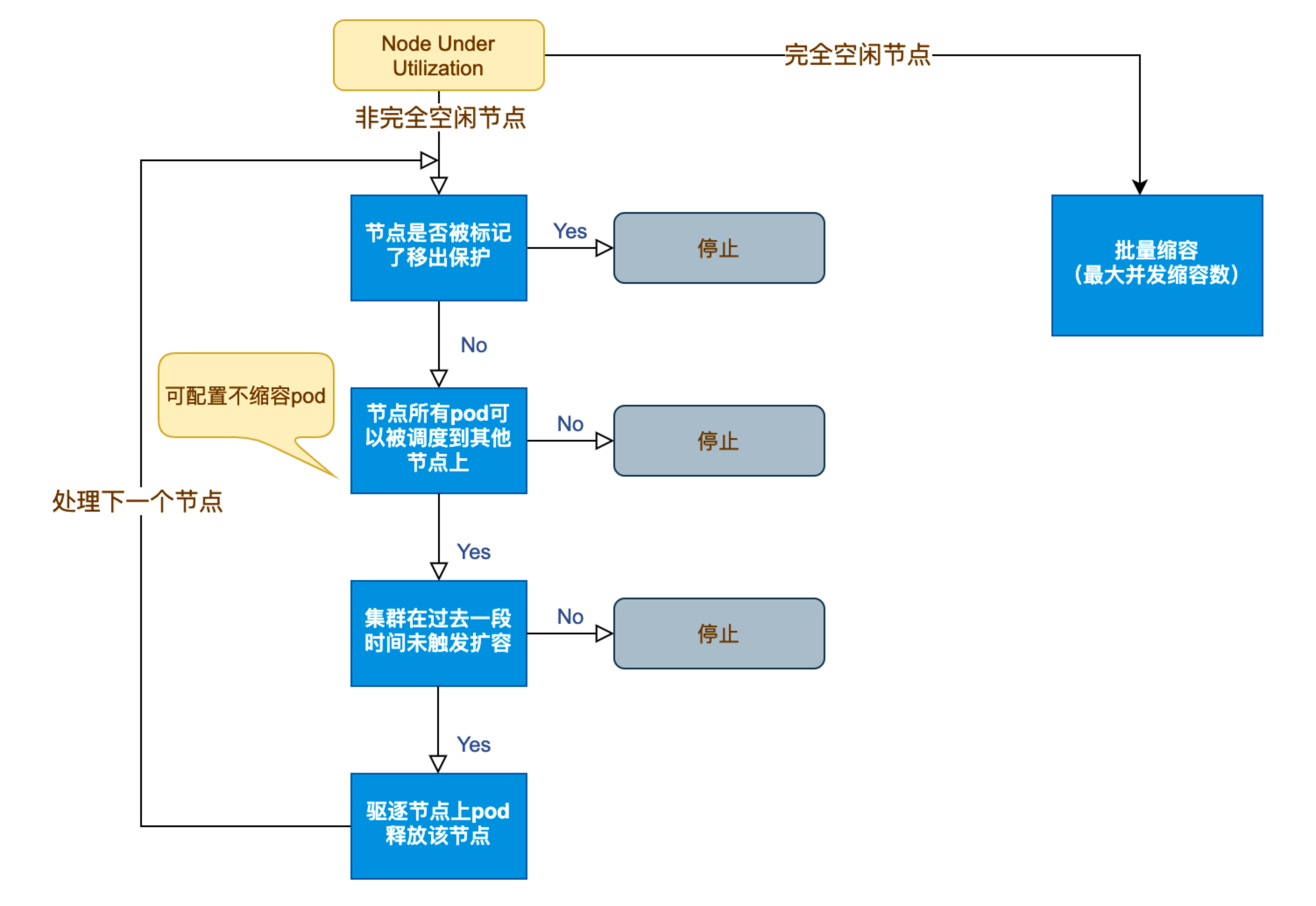
Kubernetes 节点自动伸缩(Cluster Autoscaler)原理与实践
在 Kubernetes 集群中,如何在保障应用高可用的同时有效地管理资源,一直是运维人员和开发者关注的重点。随着微服务架构的普及,集群内各个服务的负载波动日趋明显,传统的手动扩缩容方式已无法满足实时性和弹性需求。 Cluster Auto…...