Python GDAL读取栅格数据并基于质量评估波段QA对指定数据加以筛选掩膜
本文介绍基于Python语言中gdal模块,对遥感影像数据进行栅格读取与计算,同时基于QA波段对像元加以筛选、掩膜的操作。
本文所要实现的需求具体为:现有自行计算的全球叶面积指数(LAI).tif格式栅格产品(下称“自有产品”),为了验证其精确度,需要与已有学者提出的成熟产品——GLASS全球LAI.hdf格式栅格产品(下称“GLASS产品”)进行做差对比;其中,自有产品除了LAI波段外,还有一个质量评估波段(QA),即自有产品在后期使用时,还需结合QA波段进行筛选、掩膜等处理。其中,二者均为基于MODIS hv分幅的产品。
本文分为两部分,第一部分为代码的详细分段讲解,第二部分为完整代码。
1、代码分段讲解
1.1 模块与路径准备
首先,需要对用到的模块与存放栅格图像的各类路径加以准备。
import os
import copy
import numpy as np
import pylab as plt
from osgeo import gdal# rt_file_path="G:/Postgraduate/LAI_Glass_RTlab/Rc_Lai_A2018161_h12v03.tif"# gl_file_path="G:/Postgraduate/LAI_Glass_RTlab/GLASS01E01.V50.A2018161.h12v03.2020323.hdf"# out_file_path="G:/Postgraduate/LAI_Glass_RTlab/test.tif"
rt_file_path="I:/LAI_RTLab/A2018161/"
gl_file_path="I:/LAI_Glass/2018161/"
out_file_path="I:/LAI_Dif/"其中,rt_file_path为自有产品的存放路径,gl_file_path为GLASS产品的存放路径,out_file_path为最终二者栅格做完差值处理后结果的存放路径。
1.2 栅格图像文件名读取与配对
接下来,需要将全部待处理的栅格图像用os.listdir()进行获取,并用for循环进行循环批量处理操作的准备。
rt_file_list=os.listdir(rt_file_path)
for rt_file in rt_file_list:file_name_split=rt_file.split("_")rt_hv=file_name_split[3][:-4]gl_file_list=os.listdir(gl_file_path)for gl_file in gl_file_list:if rt_hv in gl_file:rt_file_tif_path=rt_file_path+rt_filegl_file_tif_path=gl_file_path+gl_file其中,由于本文需求是对两种产品做差,因此首先需要结合二者的hv分幅编号,将同一分幅编号的两景遥感影像放在一起;因此,依据自有产品文件名的特征,选择.split()进行字符串分割,并随后截取获得遥感影像的hv分幅编号。
1.3 输出文件名称准备
前述1.1部分已经配置好了输出文件存放的路径,但是还没有进行输出文件文件名的配置;因此这里我们需要配置好每一个做差后的遥感影像的文件存放路径与名称。其中,我们就直接以遥感影像的hv编号作为输出结果文件名。
DRT_out_file_path=out_file_path+"DRT/"ifnot os.path.exists(DRT_out_file_path):os.makedirs(DRT_out_file_path)DRT_out_file_tif_path=os.path.join(DRT_out_file_path,rt_hv+".tif")eco_out_file_path=out_file_path+"eco/"ifnot os.path.exists(eco_out_file_path):os.makedirs(eco_out_file_path)eco_out_file_tif_path=os.path.join(eco_out_file_path,rt_hv+".tif")wat_out_file_path=out_file_path+"wat/"ifnot os.path.exists(wat_out_file_path):os.makedirs(wat_out_file_path)wat_out_file_tif_path=os.path.join(wat_out_file_path,rt_hv+".tif")tim_out_file_path=out_file_path+"tim/"ifnot os.path.exists(tim_out_file_path):os.makedirs(tim_out_file_path)tim_out_file_tif_path=os.path.join(tim_out_file_path,rt_hv+".tif")这一部分代码分为了四个部分,是因为自有产品的LAI是分别依据四种算法得到的,在做差时需要每一种算法分别和GLASS产品进行相减,因此配置了四个输出路径文件夹。
1.4 栅格文件数据与信息读取
接下来,利用gdal模块对.tif与.hdf等两种栅格图像加以读取。
rt_raster=gdal.Open(rt_file_path+rt_file)rt_band_num=rt_raster.RasterCountrt_raster_array=rt_raster.ReadAsArray()rt_lai_array=rt_raster_array[0]rt_qa_array=rt_raster_array[1]rt_lai_band=rt_raster.GetRasterBand(1)# rt_lai_nodata=rt_lai_band.GetNoDataValue()# rt_lai_nodata=32767# rt_lai_mask=np.ma.masked_equal(rt_lai_array,rt_lai_nodata)rt_lai_array_mask=np.where(rt_lai_array>30000,np.nan,rt_lai_array)rt_lai_array_fin=rt_lai_array_mask*0.001gl_raster=gdal.Open(gl_file_path+gl_file)gl_band_num=gl_raster.RasterCountgl_raster_array=gl_raster.ReadAsArray()gl_lai_array=gl_raster_arraygl_lai_band=gl_raster.GetRasterBand(1)gl_lai_array_mask=np.where(gl_lai_array>1000,np.nan,gl_lai_array)gl_lai_array_fin=gl_lai_array_mask*0.01row=rt_raster.RasterYSizecol=rt_raster.RasterXSizegeotransform=rt_raster.GetGeoTransform()projection=rt_raster.GetProjection()首先,以上述代码的第一段为例进行讲解。其中,gdal.Open()读取栅格图像;.RasterCount获取栅格图像波段数量;.ReadAsArray()将栅格图像各波段的信息读取为Array格式,当波段数量大于1时,其共有三维,第一维为波段的个数;rt_raster_array[0]表示取Array中的第一个波段,在本文中也就是自有产品的LAI波段;rt_qa_array=rt_raster_array[1]则表示取出第二个波段,在本文中也就是自有产品的QA波段;.GetRasterBand(1)表示获取栅格图像中的第一个波段(注意,这里序号不是从0开始而是从1开始);np.where(rt_lai_array>30000,np.nan,rt_lai_array)表示利用np.where()函数对Array中第一个波段中像素>30000加以选取,并将其设置为nan,其他值不变。这一步骤是消除图像中填充值、Nodata值的方法。最后一句*0.001是将图层原有的缩放系数复原。
其次,上述代码第三段为获取栅格行、列数与投影变换信息。
1.5 差值计算与QA波段筛选
接下来,首先对自有产品与GLASS产品加以做差操作,随后需要对四种算法分别加以提取。
lai_dif=rt_lai_array_fin-gl_lai_array_finlai_dif=lai_dif*1000rt_qa_array_bin=copy.copy(rt_qa_array)rt_qa_array_row,rt_qa_array_col=rt_qa_array.shapefor i inrange(rt_qa_array_row):for j inrange(rt_qa_array_col):rt_qa_array_bin[i][j]="{:012b}".format(rt_qa_array_bin[i][j])[-4:]# DRT_pixel_pos=np.where((rt_qa_array_bin>=100) & (rt_qa_array_bin==11))# eco_pixel_pos=np.where((rt_qa_array_bin<100) & (rt_qa_array_bin==111))# wat_pixel_pos=np.where((rt_qa_array_bin<1000) & (rt_qa_array_bin==1011))# tim_pixel_pos=np.where((rt_qa_array_bin<1100) & (rt_qa_array_bin==1111))# colormap=plt.cm.Greens# plt.figure(1)# # plt.subplot(2,4,1)# plt.imshow(rt_lai_array_fin,cmap=colormap,interpolation='none')# plt.title("RT_LAI")# plt.colorbar()# plt.figure(2)# # plt.subplot(2,4,2)# plt.imshow(gl_lai_array_fin,cmap=colormap,interpolation='none')# plt.title("GLASS_LAI")# plt.colorbar()# plt.figure(3)# dif_colormap=plt.cm.get_cmap("Spectral")# plt.imshow(lai_dif,cmap=dif_colormap,interpolation='none')# plt.title("Difference_LAI (RT-GLASS)")# plt.colorbar()DRT_lai_dif_array=np.where((rt_qa_array_bin>=100) | (rt_qa_array_bin==11),np.nan,lai_dif)eco_lai_dif_array=np.where((rt_qa_array_bin<100) | (rt_qa_array_bin==111),np.nan,lai_dif)wat_lai_dif_array=np.where((rt_qa_array_bin<1000) | (rt_qa_array_bin==1011),np.nan,lai_dif)tim_lai_dif_array=np.where((rt_qa_array_bin<1100) | (rt_qa_array_bin==1111),np.nan,lai_dif)# plt.figure(4)# plt.imshow(DRT_lai_dif_array)# plt.colorbar()# plt.figure(5)# plt.imshow(eco_lai_dif_array)# plt.colorbar()# plt.figure(6)# plt.imshow(wat_lai_dif_array)# plt.colorbar()# plt.figure(7)# plt.imshow(tim_lai_dif_array)# plt.colorbar()其中,上述代码前两句为差值计算与数据化整。将数据转换为整数,可以减少结果数据图层的数据量(因为不需要存储小数了)。
随后,开始依据QA波段进行数据筛选与掩膜。其实各类遥感影像(例如MODIS、Landsat等)的QA波段都是比较近似的:通过一串二进制码来表示遥感影像的质量、信息等,其中不同的比特位往往都代表着一种特性。例如下图所示为Landsat Collection 2 Level-2的QA波段含义。
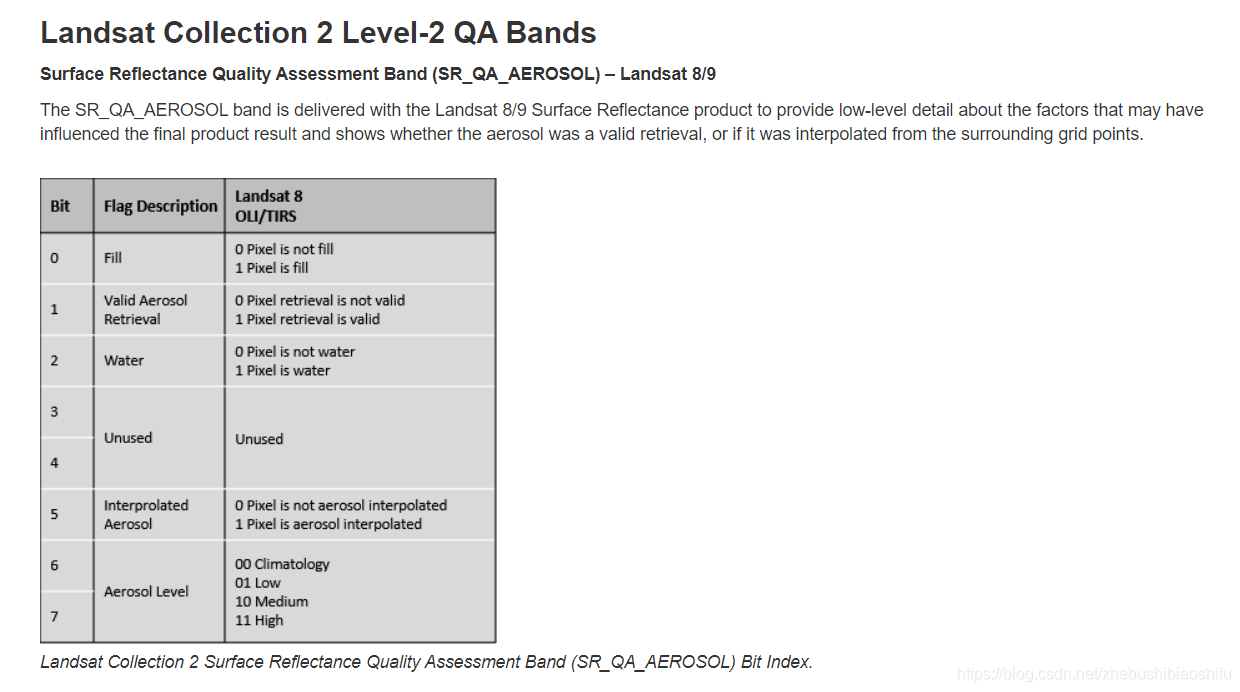
在这里,QA波段原本为十进制(一般遥感影像为了节省空间,QA波段都是写成十进制的形式),因此需要将其转换为二进制;随后通过获取指定需要的二进制数据位数(在本文中也就是能确定自有产品中这一像素来自于哪一种算法的二进制位数),从而判断这一像素所得LAI是通过哪一种算法得到的,从而将每种算法对应的像素分别放在一起处理。DRT_lai_dif_array等四个变量分别表示四种算法中,除了自己这一种算法得到的像素之外的其他所有像素;之所以选择这种方式,是因为后期我们可以将其直接掩膜掉,那么剩下的就是这种算法自身的像素了。
其中,上述代码注释掉的plt相关内容可以实现绘制空间分布图,大家感兴趣可以尝试使用。
1.6 结果栅格文件写入与保存
接下来,将我们完成上述差值计算与依据算法进行筛选后的图像保存。
driver=gdal.GetDriverByName("Gtiff")out_DRT_lai=driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_DRT_lai.SetGeoTransform(geotransform)out_DRT_lai.SetProjection(projection)out_DRT_lai.GetRasterBand(1).WriteArray(DRT_lai_dif_array)out_DRT_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_eco_lai=driver.Create(eco_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_eco_lai.SetGeoTransform(geotransform)out_eco_lai.SetProjection(projection)out_eco_lai.GetRasterBand(1).WriteArray(eco_lai_dif_array)out_eco_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_wat_lai=driver.Create(wat_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_wat_lai.SetGeoTransform(geotransform)out_wat_lai.SetProjection(projection)out_wat_lai.GetRasterBand(1).WriteArray(wat_lai_dif_array)out_wat_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_tim_lai=driver.Create(tim_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_tim_lai.SetGeoTransform(geotransform)out_tim_lai.SetProjection(projection)out_tim_lai.GetRasterBand(1).WriteArray(tim_lai_dif_array)out_tim_lai=Noneprint(rt_hv)其中,.GetDriverByName("Gtiff")表示保存为.tif格式的GeoTIFF文件;driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)表示按照路径、行列数、波段数与数据格式等建立一个新的栅格图层,作为输出图层的框架;其后表示分别将地理投影转换信息与像素具体数值分别赋予这一新建的栅格图层;最后=None表示将其从内存空间中释放,完成写入与保存工作。
2、完整代码
本文所需完整代码如下:
# -*- coding: utf-8 -*-"""
Created on Thu Jul 15 19:36:15 2021@author: fkxxgis
"""import os
import copy
import numpy as np
import pylab as plt
from osgeo import gdal# rt_file_path="G:/Postgraduate/LAI_Glass_RTlab/Rc_Lai_A2018161_h12v03.tif"# gl_file_path="G:/Postgraduate/LAI_Glass_RTlab/GLASS01E01.V50.A2018161.h12v03.2020323.hdf"# out_file_path="G:/Postgraduate/LAI_Glass_RTlab/test.tif"
rt_file_path="I:/LAI_RTLab/A2018161/"
gl_file_path="I:/LAI_Glass/2018161/"
out_file_path="I:/LAI_Dif/"rt_file_list=os.listdir(rt_file_path)
for rt_file in rt_file_list:file_name_split=rt_file.split("_")rt_hv=file_name_split[3][:-4]gl_file_list=os.listdir(gl_file_path)for gl_file in gl_file_list:if rt_hv in gl_file:rt_file_tif_path=rt_file_path+rt_filegl_file_tif_path=gl_file_path+gl_fileDRT_out_file_path=out_file_path+"DRT/"ifnot os.path.exists(DRT_out_file_path):os.makedirs(DRT_out_file_path)DRT_out_file_tif_path=os.path.join(DRT_out_file_path,rt_hv+".tif")eco_out_file_path=out_file_path+"eco/"ifnot os.path.exists(eco_out_file_path):os.makedirs(eco_out_file_path)eco_out_file_tif_path=os.path.join(eco_out_file_path,rt_hv+".tif")wat_out_file_path=out_file_path+"wat/"ifnot os.path.exists(wat_out_file_path):os.makedirs(wat_out_file_path)wat_out_file_tif_path=os.path.join(wat_out_file_path,rt_hv+".tif")tim_out_file_path=out_file_path+"tim/"ifnot os.path.exists(tim_out_file_path):os.makedirs(tim_out_file_path)tim_out_file_tif_path=os.path.join(tim_out_file_path,rt_hv+".tif")rt_raster=gdal.Open(rt_file_path+rt_file)rt_band_num=rt_raster.RasterCountrt_raster_array=rt_raster.ReadAsArray()rt_lai_array=rt_raster_array[0]rt_qa_array=rt_raster_array[1]rt_lai_band=rt_raster.GetRasterBand(1)# rt_lai_nodata=rt_lai_band.GetNoDataValue()# rt_lai_nodata=32767# rt_lai_mask=np.ma.masked_equal(rt_lai_array,rt_lai_nodata)rt_lai_array_mask=np.where(rt_lai_array>30000,np.nan,rt_lai_array)rt_lai_array_fin=rt_lai_array_mask*0.001gl_raster=gdal.Open(gl_file_path+gl_file)gl_band_num=gl_raster.RasterCountgl_raster_array=gl_raster.ReadAsArray()gl_lai_array=gl_raster_arraygl_lai_band=gl_raster.GetRasterBand(1)gl_lai_array_mask=np.where(gl_lai_array>1000,np.nan,gl_lai_array)gl_lai_array_fin=gl_lai_array_mask*0.01row=rt_raster.RasterYSizecol=rt_raster.RasterXSizegeotransform=rt_raster.GetGeoTransform()projection=rt_raster.GetProjection()lai_dif=rt_lai_array_fin-gl_lai_array_finlai_dif=lai_dif*1000rt_qa_array_bin=copy.copy(rt_qa_array)rt_qa_array_row,rt_qa_array_col=rt_qa_array.shapefor i inrange(rt_qa_array_row):for j inrange(rt_qa_array_col):rt_qa_array_bin[i][j]="{:012b}".format(rt_qa_array_bin[i][j])[-4:]# DRT_pixel_pos=np.where((rt_qa_array_bin>=100) & (rt_qa_array_bin==11))# eco_pixel_pos=np.where((rt_qa_array_bin<100) & (rt_qa_array_bin==111))# wat_pixel_pos=np.where((rt_qa_array_bin<1000) & (rt_qa_array_bin==1011))# tim_pixel_pos=np.where((rt_qa_array_bin<1100) & (rt_qa_array_bin==1111))# colormap=plt.cm.Greens# plt.figure(1)# # plt.subplot(2,4,1)# plt.imshow(rt_lai_array_fin,cmap=colormap,interpolation='none')# plt.title("RT_LAI")# plt.colorbar()# plt.figure(2)# # plt.subplot(2,4,2)# plt.imshow(gl_lai_array_fin,cmap=colormap,interpolation='none')# plt.title("GLASS_LAI")# plt.colorbar()# plt.figure(3)# dif_colormap=plt.cm.get_cmap("Spectral")# plt.imshow(lai_dif,cmap=dif_colormap,interpolation='none')# plt.title("Difference_LAI (RT-GLASS)")# plt.colorbar()DRT_lai_dif_array=np.where((rt_qa_array_bin>=100) | (rt_qa_array_bin==11),np.nan,lai_dif)eco_lai_dif_array=np.where((rt_qa_array_bin<100) | (rt_qa_array_bin==111),np.nan,lai_dif)wat_lai_dif_array=np.where((rt_qa_array_bin<1000) | (rt_qa_array_bin==1011),np.nan,lai_dif)tim_lai_dif_array=np.where((rt_qa_array_bin<1100) | (rt_qa_array_bin==1111),np.nan,lai_dif)# plt.figure(4)# plt.imshow(DRT_lai_dif_array)# plt.colorbar()# plt.figure(5)# plt.imshow(eco_lai_dif_array)# plt.colorbar()# plt.figure(6)# plt.imshow(wat_lai_dif_array)# plt.colorbar()# plt.figure(7)# plt.imshow(tim_lai_dif_array)# plt.colorbar()driver=gdal.GetDriverByName("Gtiff")out_DRT_lai=driver.Create(DRT_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_DRT_lai.SetGeoTransform(geotransform)out_DRT_lai.SetProjection(projection)out_DRT_lai.GetRasterBand(1).WriteArray(DRT_lai_dif_array)out_DRT_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_eco_lai=driver.Create(eco_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_eco_lai.SetGeoTransform(geotransform)out_eco_lai.SetProjection(projection)out_eco_lai.GetRasterBand(1).WriteArray(eco_lai_dif_array)out_eco_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_wat_lai=driver.Create(wat_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_wat_lai.SetGeoTransform(geotransform)out_wat_lai.SetProjection(projection)out_wat_lai.GetRasterBand(1).WriteArray(wat_lai_dif_array)out_wat_lai=Nonedriver=gdal.GetDriverByName("Gtiff")out_tim_lai=driver.Create(tim_out_file_tif_path,row,col,1,gdal.GDT_Float32)out_tim_lai.SetGeoTransform(geotransform)out_tim_lai.SetProjection(projection)out_tim_lai.GetRasterBand(1).WriteArray(tim_lai_dif_array)out_tim_lai=Noneprint(rt_hv)至此,大功告成。
相关文章:
Python GDAL读取栅格数据并基于质量评估波段QA对指定数据加以筛选掩膜
本文介绍基于Python语言中gdal模块,对遥感影像数据进行栅格读取与计算,同时基于QA波段对像元加以筛选、掩膜的操作。本文所要实现的需求具体为:现有自行计算的全球叶面积指数(LAI).tif格式栅格产品(下称“自…...
Vue3:有关v-model的用法
目录 前言: 回忆基本的原生用法: 原生input的封装: 自定义v-model参数: 对el-input的二次封装: 多个v-model进行绑定: v-model修饰符: v-model自定义参数与自定义修饰符的结合: 前言&am…...
CF1692C Where‘s the Bishop? 题解
CF1692C Wheres the Bishop? 题解题目链接字面描述题面翻译题目描述题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1提示代码实现题目 链接 https://www.luogu.com.cn/problem/CF1692C 字面描述 题面翻译 题目描述 有一个888\times888的棋盘,列编号从…...

Jenkins集成Allure报告
Jenkins集成Allure报告 紧接上文:Jenkins部署及持续集成——傻瓜式教程 使用Allure报告 1、在插件库下载Allure插件Allure Jenkins Plugin 2、在构建后操作中加入allure执行的报告目录(相对于项目的路径) 3、run.py代码改成如下 import p…...
【数据结构】AVL树
AVL树一、AVL树的概念二、AVL的接口2.1 插入2.2 旋转2.2.1 左单旋2.2.2 右单旋2.2.3 左右双旋2.2.4 右左双旋三、验证四、源码一、AVL树的概念 当我们用普通的搜索树插入数据的时候,如果插入的数据是有序的,那么就退化成了一个链表,搜索效率…...

这一次我不再低调,老板法拉利的车牌有我的汗水
起源: 5Why分析法最初是由丰田佐吉提出的,后来,丰田汽车公司在发展完善其制造方法学的过程中持续采用该方法。5Why分析法作为丰田生产系统的入门课程之一,是问题求解的关键培训课程。丰田生产系统的设计师大野耐一曾将5Why分析法描述为:“丰田科学方法的基础,重复五次,问…...

通过连接另一个数组的子数组得到一个数组
给你一个长度为 n 的二维整数数组 groups ,同时给你一个整数数组 nums 。 你是否可以从 nums 中选出 n 个 不相交 的子数组,使得第 i 个子数组与 groups[i] (下标从 0 开始)完全相同,且如果 i > 0 ,那么…...

公派访问学者的申请条件
知识人网海外访问学者申请老师为大家分享公派访问学者申请的基本条件以及哪些人员的申请是暂不受理的,供大家参考:一、 申请人基本条件:1.热爱社会主义祖国,具有良好的思想品德和政治素质,无违法违纪记录。2.具有良好专…...

多点电容触摸屏实验
目录 一、简介 二、硬件原理 编辑1、CT_INT 2、I2C2_SCL和I2C2_SDA 3、RESET复位引脚 三、FT54x6/FT52x6电容触摸芯片 四、代码编写 1、编写ft5426.h 2、编写ft5426.c 3、main函数 一、简介 电容屏只需要手指轻触即可,而电阻屏是需要手指给予一定的压力才…...

【算法与数据结构(C语言)】栈和队列
文章目录 目录 前言 一、栈 1.栈的概念及结构 2.栈的实现 入栈 出栈 获取栈顶元素 获取栈中有效元素个数 检测栈是否为空,如果为空返回非零结果,如果不为空返回0 销毁栈 二、队列 1.队列的概念及结构 2.队列的实现 初始化队列 队尾入队列 队头出队列 获…...
Uni-app使用vant和uview组件
目录 1.安装vant组件 1.1安装前需知 1.2.安装 1.3.创建uni-app项目 2.安装uview-ui组件 2.1官网 2.2安装 2.3安装成功 1.安装vant组件 1.1安装前需知 小程序能使用vant-weapp组件,且官网的安装是直接导入小程序中,不能直接导入uni-app框架中 V…...
2023年PMP考试应该注意些什么?
首先注意(报考条件) 2023年PMP考试报名流程: 一、PMP英文报名: 英文报名时间无限制,随时可以报名,但有一年的有效期,所以大家尽量提前报名,在英文报名有效期内进行中文报名。 英…...

selenium环境安装及使用
selenium简介官网https://www.selenium.dev简介用于web浏览器测试的工具支持的浏览器包括IE,Firefox,Chrome,edge等使用简单,可使用java,python等多种语言编写用例脚本主要由三个工具构成,webdriver,IDE,web自动化环境…...
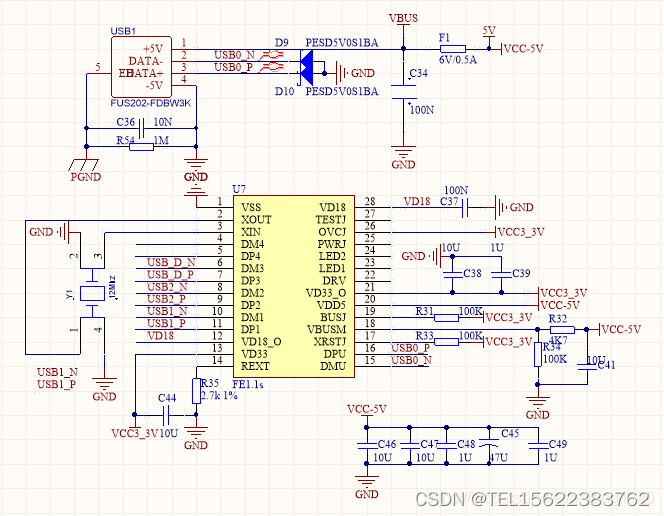
高性能低功耗4口高速USB2.0 HUB 完美替代FE1.1S和FE8.1
该NS1.1s是一个高度集成的,高品质,高性能,低功耗,为USB 2.0高速4端口集线器又低成本的解决方案。 (点击即可咨询芯片详细信息) NS1.1s的特点 1.通用串行总线规范修订版2.0(USB 2.0)完…...
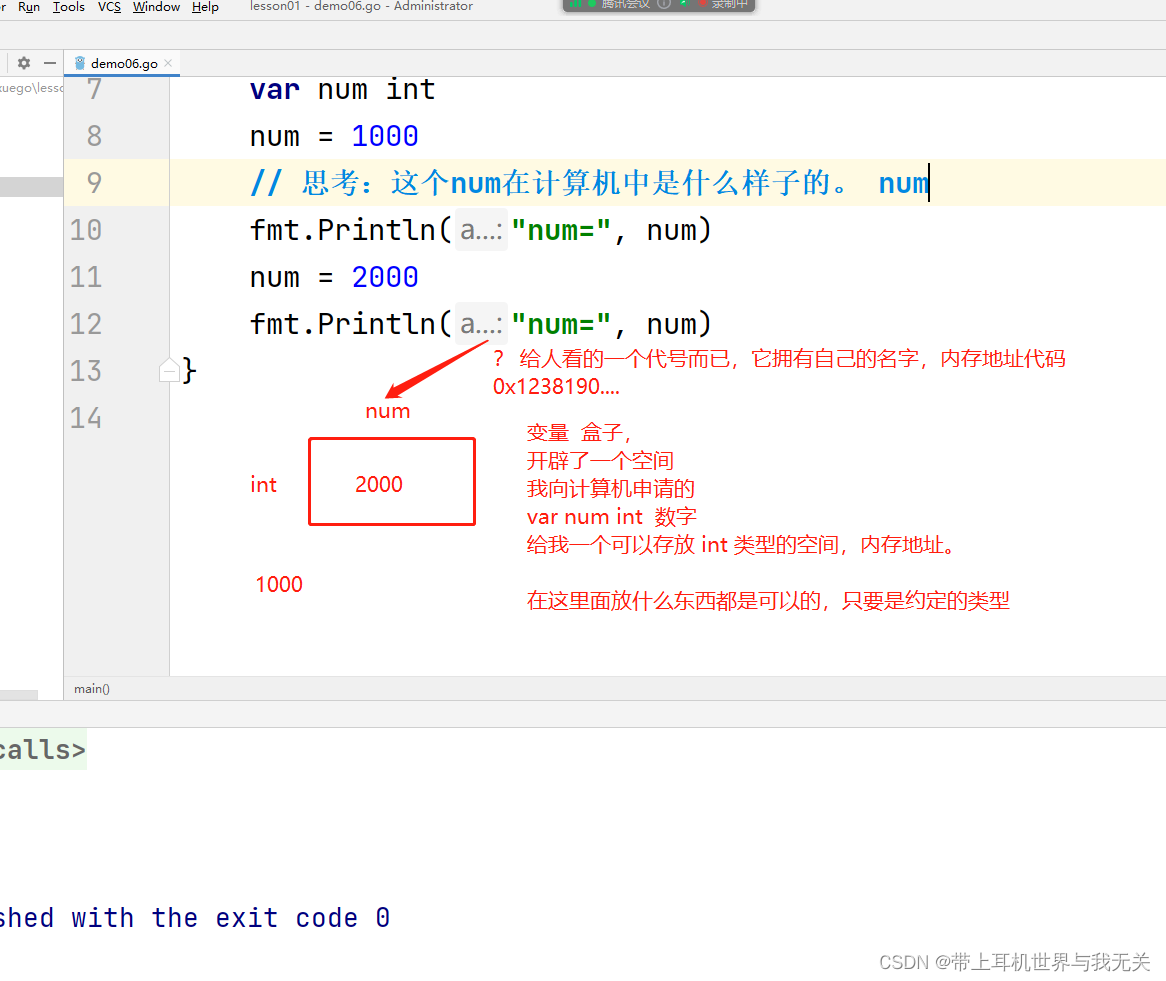
Go全栈学习(一)基础语法
Go语言基础语法 文章目录Go语言基础语法注释变量变量的定义变量的交换理解变量(内存地址)匿名变量变量的作用域常量2023.2.4日 总结// 关于Goland 中 执行的问题// 1、包下执行 (一个 main 函数来执行,如果有多个,无法…...
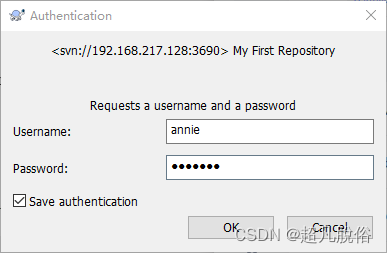
centos7搭建svn配置
基本概述 Apache Subversion(简称SVN,svn),一个开放源代码的版本控制系统,相较于RCS、CVS,它采用了分支管理系统,它的设计目标就是取代CVS。互联网上很多版本控制服务已从CVS转移到Subversion。…...
趣味三角——第12章——tanx
第12章节 tanx In his very numerous memoires, and especially in his great work, Introductio in analysin infinitorum (1748), Euler displayed the most wonderful skill in obtaining a rich harvest of results of great interest. . . . Hardly any other work …...
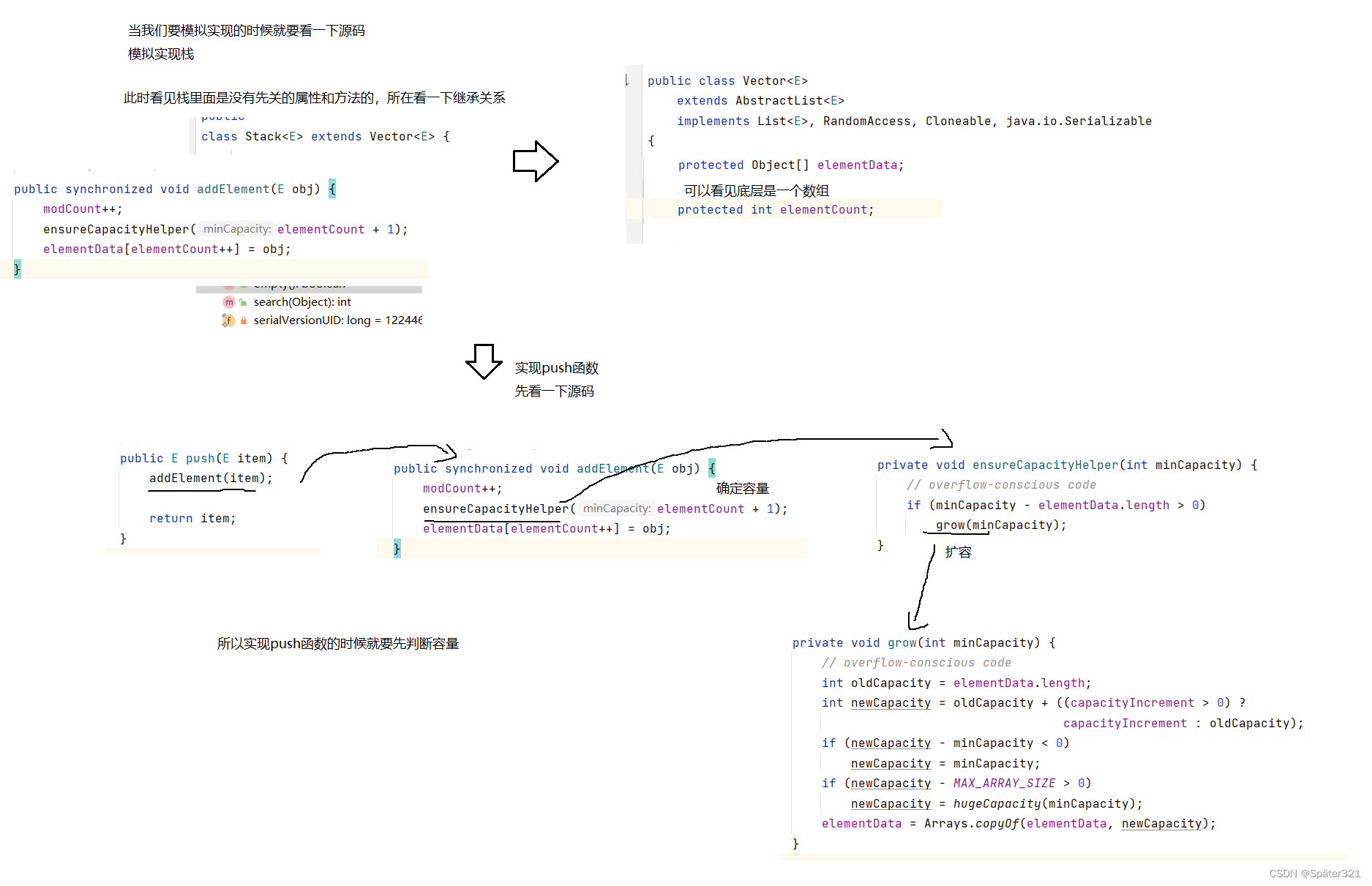
Java - 数据结构,栈
一、栈 1.1、什么是栈 栈:一种特殊的线性表,其只允许在固定的一端进行插入和删除元素操作。进行数据插入和删除操作的一端称为栈 顶,另一端称为栈底。栈中的数据元素遵守后进先出LIFO(Last In First Out)的原则。 压…...
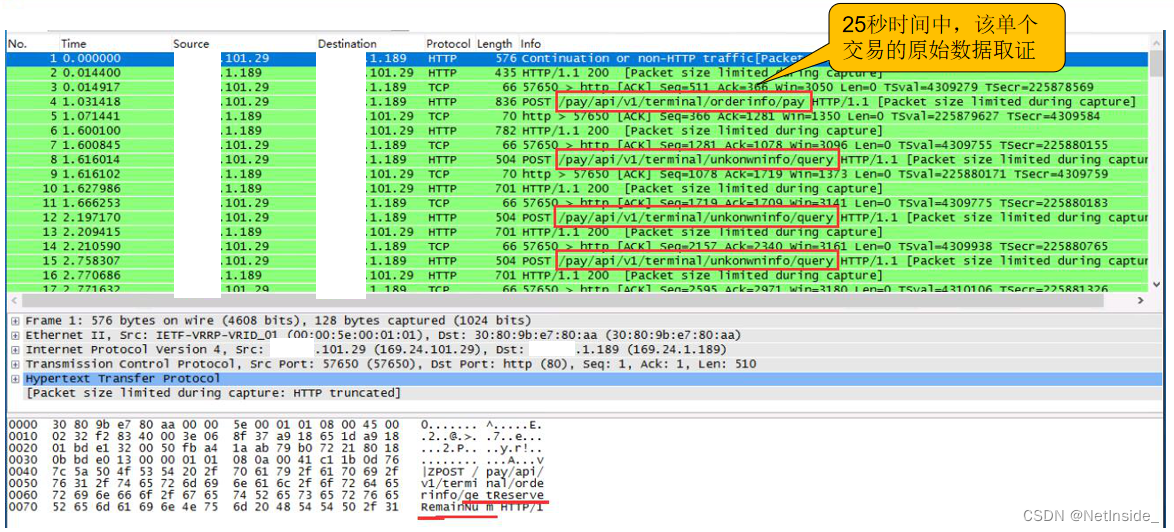
某餐厅系统网络故障分析案例
背景 针对食堂经营企业,某堂食软件为客户提供优化堂食就餐流程、提高食堂服务水平和管理效率。 某上海客户使用该堂食系统,在就餐高峰时段,总是出现支付、点餐等操作缓慢,动辄一个操作需要等待几十秒。该客户联系软件厂商&#…...

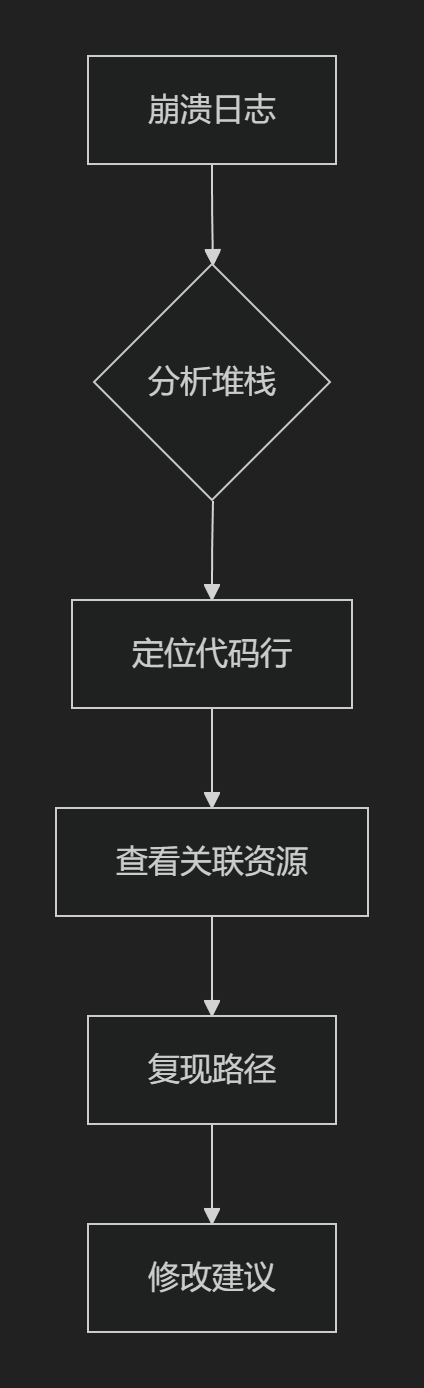
华为OD机试题,用 Java 解【密室逃生游戏】问题
最近更新的博客 华为OD机试 - 猴子爬山 | 机试题算法思路 【2023】华为OD机试 - 分糖果(Java) | 机试题算法思路 【2023】华为OD机试 - 非严格递增连续数字序列 | 机试题算法思路 【2023】华为OD机试 - 消消乐游戏(Java) | 机试题算法思路 【2023】华为OD机试 - 组成最大数…...
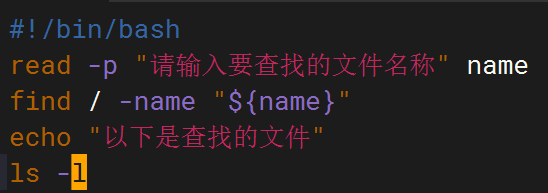
shell脚本--常见案例
1、自动备份文件或目录 2、批量重命名文件 3、查找并删除指定名称的文件: 4、批量删除文件 5、查找并替换文件内容 6、批量创建文件 7、创建文件夹并移动文件 8、在文件夹中查找文件...
【HarmonyOS 5.0】DevEco Testing:鸿蒙应用质量保障的终极武器
——全方位测试解决方案与代码实战 一、工具定位与核心能力 DevEco Testing是HarmonyOS官方推出的一体化测试平台,覆盖应用全生命周期测试需求,主要提供五大核心能力: 测试类型检测目标关键指标功能体验基…...

大模型多显卡多服务器并行计算方法与实践指南
一、分布式训练概述 大规模语言模型的训练通常需要分布式计算技术,以解决单机资源不足的问题。分布式训练主要分为两种模式: 数据并行:将数据分片到不同设备,每个设备拥有完整的模型副本 模型并行:将模型分割到不同设备,每个设备处理部分模型计算 现代大模型训练通常结合…...

UR 协作机器人「三剑客」:精密轻量担当(UR7e)、全能协作主力(UR12e)、重型任务专家(UR15)
UR协作机器人正以其卓越性能在现代制造业自动化中扮演重要角色。UR7e、UR12e和UR15通过创新技术和精准设计满足了不同行业的多样化需求。其中,UR15以其速度、精度及人工智能准备能力成为自动化领域的重要突破。UR7e和UR12e则在负载规格和市场定位上不断优化…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...
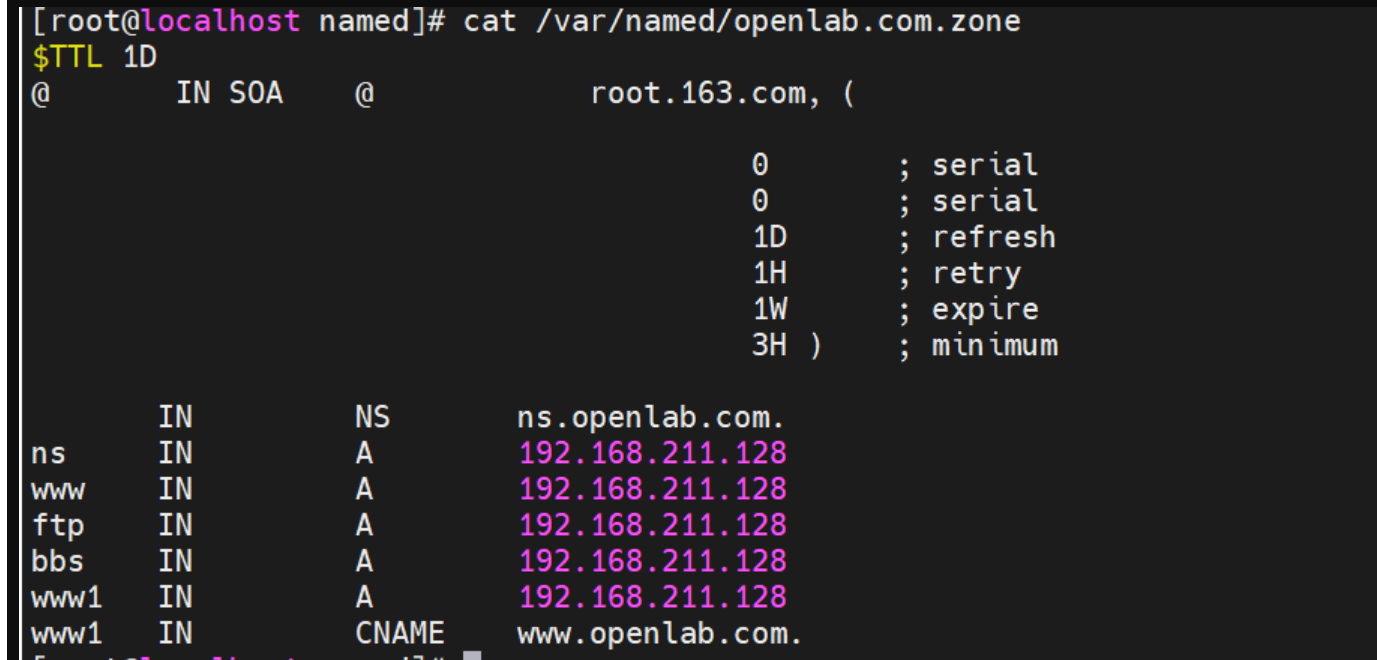
搭建DNS域名解析服务器(正向解析资源文件)
正向解析资源文件 1)准备工作 服务端及客户端都关闭安全软件 [rootlocalhost ~]# systemctl stop firewalld [rootlocalhost ~]# setenforce 0 2)服务端安装软件:bind 1.配置yum源 [rootlocalhost ~]# cat /etc/yum.repos.d/base.repo [Base…...
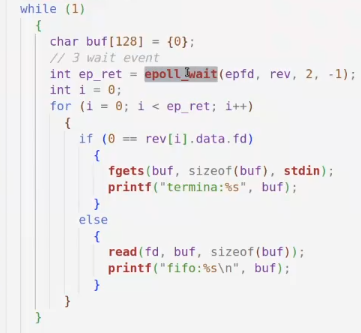
day36-多路IO复用
一、基本概念 (服务器多客户端模型) 定义:单线程或单进程同时监测若干个文件描述符是否可以执行IO操作的能力 作用:应用程序通常需要处理来自多条事件流中的事件,比如我现在用的电脑,需要同时处理键盘鼠标…...
基于Java+VUE+MariaDB实现(Web)仿小米商城
仿小米商城 环境安装 nodejs maven JDK11 运行 mvn clean install -DskipTestscd adminmvn spring-boot:runcd ../webmvn spring-boot:runcd ../xiaomi-store-admin-vuenpm installnpm run servecd ../xiaomi-store-vuenpm installnpm run serve 注意:运行前…...

vue3 daterange正则踩坑
<el-form-item label"空置时间" prop"vacantTime"> <el-date-picker v-model"form.vacantTime" type"daterange" start-placeholder"开始日期" end-placeholder"结束日期" clearable :editable"fal…...

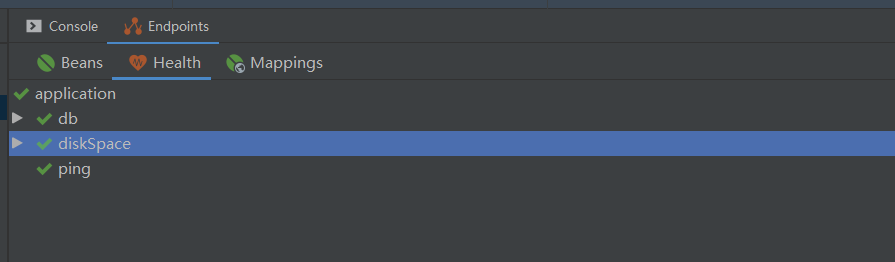
【WebSocket】SpringBoot项目中使用WebSocket
1. 导入坐标 如果springboot父工程没有加入websocket的起步依赖,添加它的坐标的时候需要带上版本号。 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-websocket</artifactId> </dep…...