点云处理【三】(点云降采样)
点云降采样
第一章 点云数据采集
第二章 点云滤波
第二章 点云降采样
1. 为什么要降采样?
我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。
降采样是一种有效的减少数据、缩减计算量的方法。
2.降采样算法
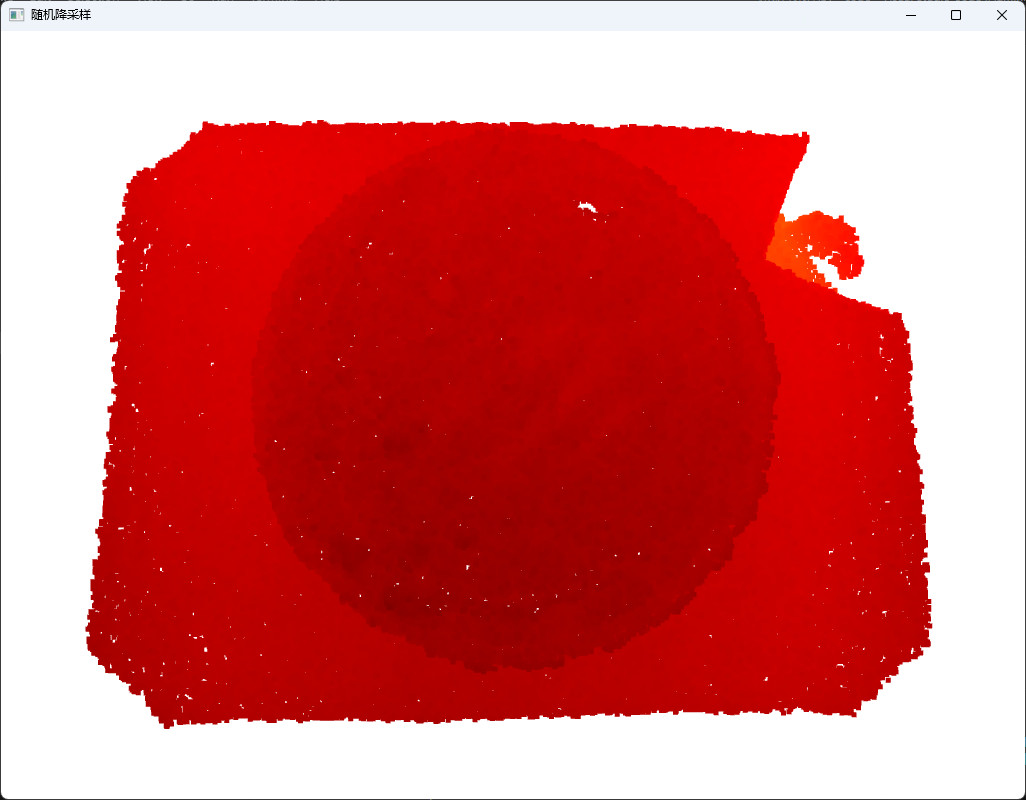
2.1 随机降采样
根据设置的比例系数随机删除点云,比较接近均匀采样,但不稳定。
Open3d
import numpy as np
import open3d as o3dpcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
downpcd = pcd.random_down_sample(sampling_ratio=0.5)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="随机降采样",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/random_sample.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;pcl::RandomSample<pcl::PointXYZ> random_sampling;random_sampling.setInputCloud(cloud);random_sampling.setSample(10000); // 设置希望得到的点数random_sampling.filter(*cloud_downsampled);std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0); // 设置背景色viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->initCameraParameters();while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
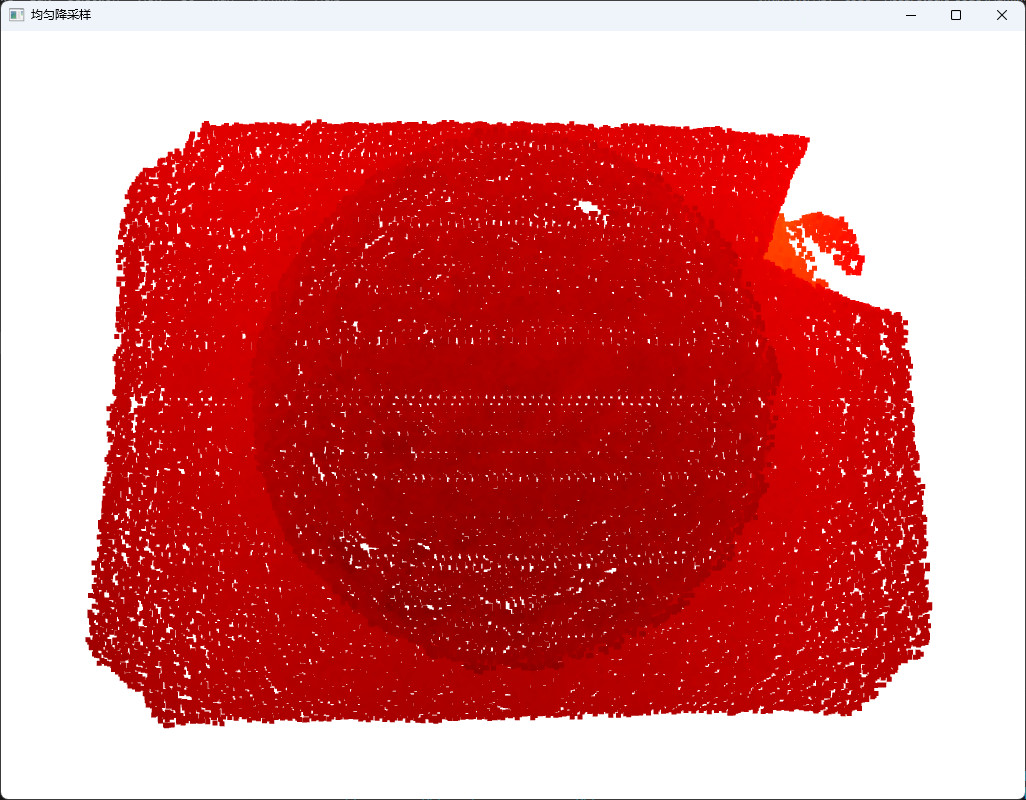
2.2 均匀降采样
就是每隔多远采集一个点,
Open3d
import numpy as np
import open3d as o3dpcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
downpcd = pcd.uniform_down_sample(6)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="均匀降采样",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/uniform_sampling.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;pcl::UniformSampling<pcl::PointXYZ> filter; // 创建均匀采样对象filter.setInputCloud(cloud); // 设置待采样点云filter.setRadiusSearch(10.0f); // 设置采样半径filter.filter(*cloud_downsampled); // 执行均匀采样,结果保存在cloud_filtered中std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0); // 设置背景色viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->initCameraParameters();viewer->saveScreenshot("screenshot.png");while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
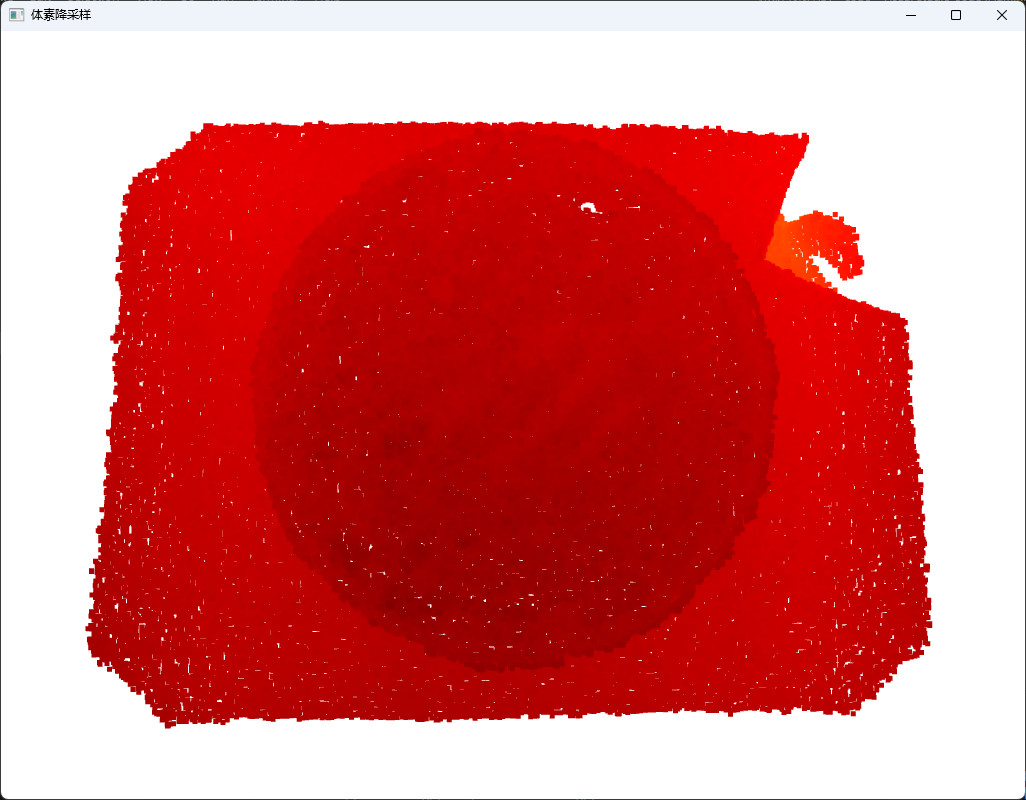
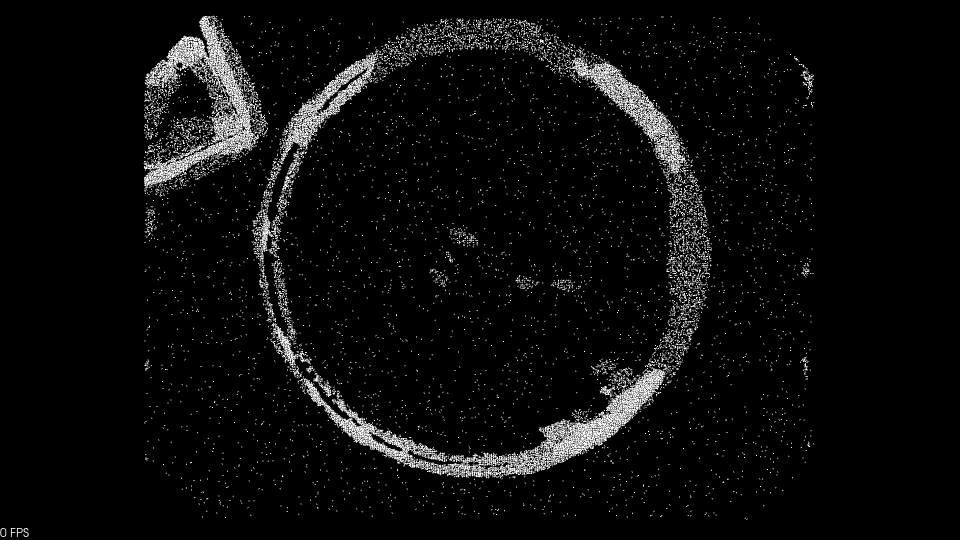
2.3 体素降采样
将空间切割为均匀大小的体素网格,以非空体素的质心代替该体素内的所有点。
原点云位置使用体素降采样后会发生变化。
open3d
import numpy as np
import open3d as o3d
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)downpcd = pcd.voxel_down_sample(voxel_size=5)
print(downpcd)
o3d.visualization.draw_geometries([downpcd], window_name="体素降采样",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
pcl
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;pcl::VoxelGrid<pcl::PointXYZ> sor;sor.setInputCloud(cloud);sor.setLeafSize(10.0f, 10.0f, 10.0f);sor.filter(*cloud_downsampled);std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0); // 设置背景色viewer->addPointCloud<pcl::PointXYZ>(cloud_sampled, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->initCameraParameters();viewer->saveScreenshot("screenshot.png");while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
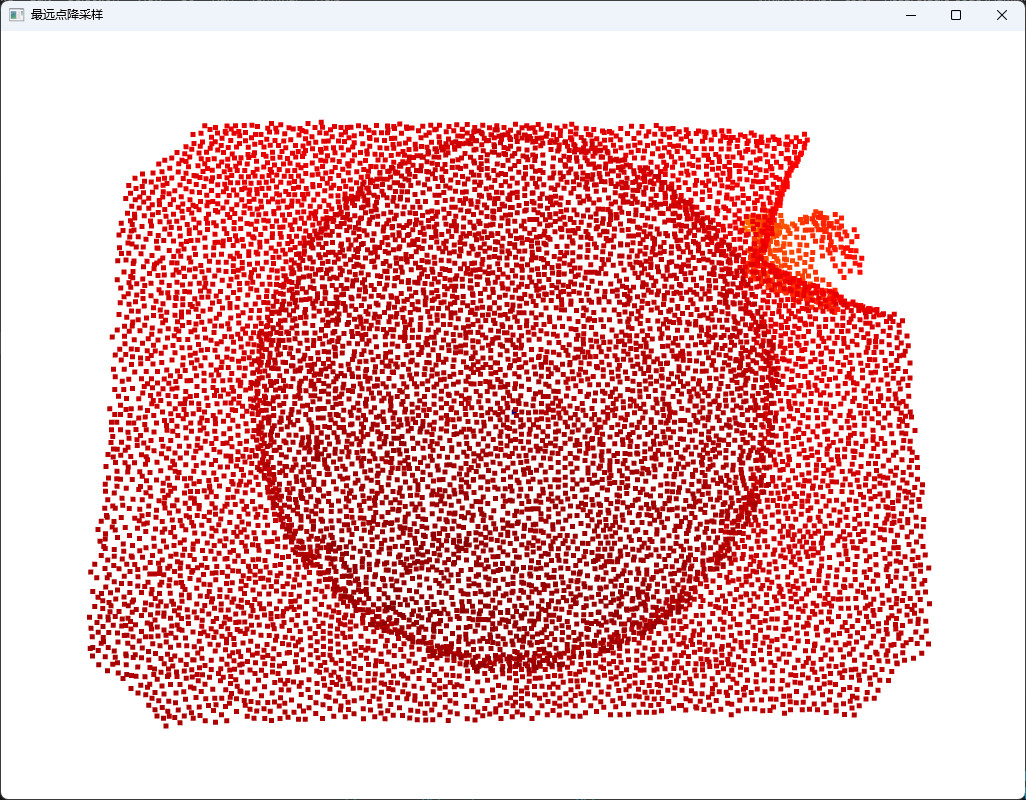
2.4 最远点降采样
首先随机选择一个点,其次,在剩下点中寻找最远的点,再去再剩下点中找到同时离这两个点最远的点,直到满足采样点个数。
Open3d
import numpy as np
import open3d as o3dpcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
print(pcd) # 输出点云点的个数
o3d.visualization.draw_geometries([pcd], window_name="原始点云",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
downpcd=pcd.farthest_point_down_sample(10000)
print(downpcd) #降采样后的点云数
o3d.visualization.draw_geometries([downpcd], window_name="最远点降采样",width=1024, height=768,left=50, top=50,mesh_show_back_face=True)
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/common/distances.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("1697165371469.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;size_t N = cloud->size();assert(N >= 10000);srand(time(0));size_t seed_index = rand() % N;pcl::PointXYZ p = cloud->points[seed_index];;cloud_downsampled->push_back(p);cloud->erase(cloud->begin() + seed_index);for (size_t i = 1; i < 10000; i++){float max_distance = 0;size_t max_index = 0;for (size_t j = 0; j < cloud->size(); j++){float distance = pcl::euclideanDistance(p, cloud->points[j]);if (distance > max_distance){max_distance = distance;max_index = max_index;}}p = cloud->points[max_index];cloud_downsampled->push_back(p);cloud->erase(cloud->begin() + max_index);}std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0); // 设置背景色viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->initCameraParameters();while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
2.5 移动最小二乘法降采样
在MLS法中,需要在一组不同位置的节点附近建立拟合曲线,每个节点都有自己的一组系数用于定义该位置附近拟合曲线的形态。因此,在计算某个节点附近的拟合曲线时,只需要计算该点的该组系数值即可。
此外,每个节点的系数取值只考虑其临近采样点,且距离节点越近的采样点贡献越大,对于未置较远的点则不予考虑。
许多文章都将移动最小二乘法作为降采样方法,我觉得这只是一种平滑,所以这里给了重建代码,不进一步实验了。
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/surface/mls.h>
#include <pcl/search/kdtree.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("second_radius_cloud.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ>);// 输出的PointCloud中有PointNormal类型,用来存储MLS算出的法线pcl::PointCloud<pcl::PointNormal> mls_points;// 定义MovingLeastSquares对象并设置参数pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> mls;mls.setComputeNormals(true);mls.setInputCloud(cloud);mls.setSearchMethod(tree);mls.setSearchRadius(30);// 曲面重建mls.process(mls_points);//std::cout << "downsampled cloud size: " << mls_points->width * mls_points->height << std::endl;// 使用PCLVisualizer进行可视化boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("MLS Cloud Viewer"));viewer->addPointCloud<pcl::PointNormal>(mls_points.makeShared(), "MLS Cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "MLS Cloud");viewer->addPointCloudNormals<pcl::PointNormal>(mls_points.makeShared(), 1, 0.05, "normals"); // 可选:显示法线viewer->saveScreenshot("screenshot.png");while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
2.6 法线空间采样
通过在法向量空间内均匀随机抽样,使所选点之间的法线分布尽可能大,结果表现为地物特征变化大的地方剩余点较多,变化小的地方剩余点稀少,可有效保持地物特征。
Open3d
import open3d as o3d
import numpy as npdef normal_space_sampling(pcd, num_bins=5, num_samples=10000):# 1. 估算法线pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=10, max_nn=30))normals = np.asarray(pcd.normals)# 2. 使用法线的x、y和z分量将法线映射到一个3D直方图或“bin”空间bins = np.linspace(-1, 1, num_bins)normal_bins = np.digitize(normals, bins)unique_bins = np.unique(normal_bins, axis=0)sampled_indices = []for b in unique_bins:indices = np.all(normal_bins == b, axis=1)bin_points = np.where(indices)[0]if bin_points.size > 0:sampled_indices.append(np.random.choice(bin_points))# 如果采样点数不足,从原点云中随机选择其他点while len(sampled_indices) < num_samples:sampled_indices.append(np.random.randint(0, len(pcd.points)))# 3. 从每个bin中选择一个点进行采样sampled_points = np.asarray(pcd.points)[sampled_indices]sampled_pcd = o3d.geometry.PointCloud()sampled_pcd.points = o3d.utility.Vector3dVector(sampled_points)return sampled_pcd# 读取点云
pcd = o3d.io.read_point_cloud("second_radius_cloud.pcd")
sampled_pcd = normal_space_sampling(pcd)
o3d.visualization.draw_geometries([sampled_pcd])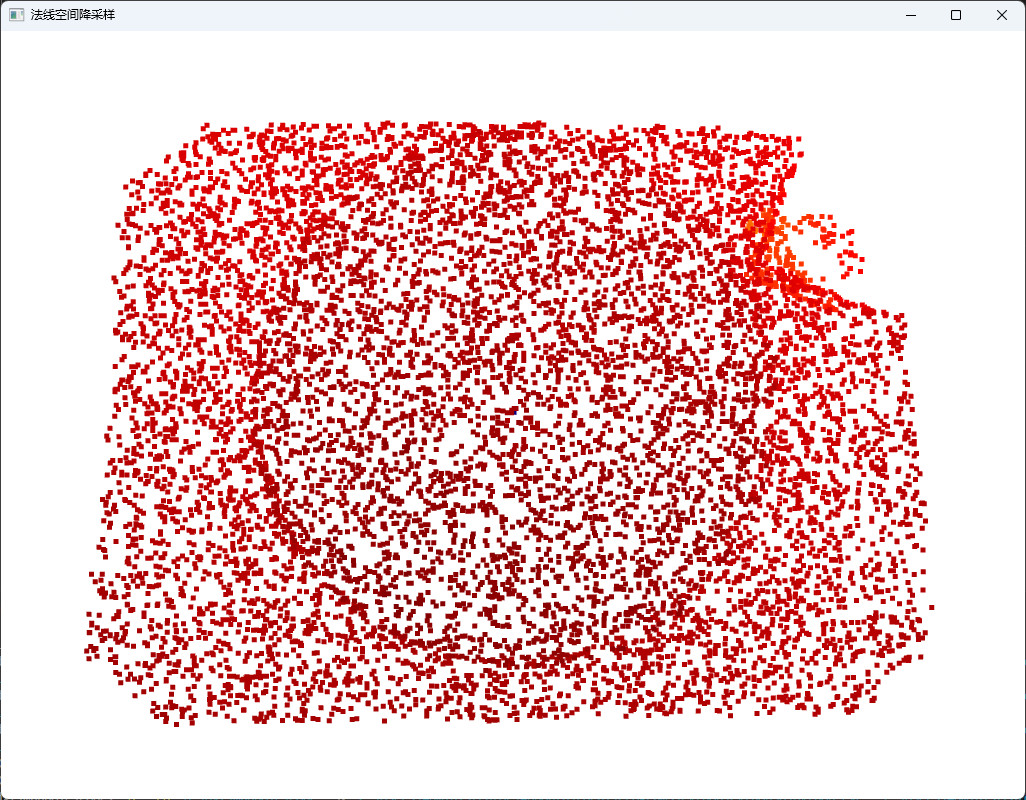
PCL
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/filters/normal_space.h>
#include <pcl/features/normal_3d.h>int main(int argc, char** argv) {pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);if (pcl::io::loadPCDFile<pcl::PointXYZ> ("second_radius_cloud.pcd", *cloud) == -1){PCL_ERROR("couldn't read file");return 0;}std::cout << "Loaded " << cloud->width * cloud->height<< " data points" << std::endl;// 计算法线pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;ne.setInputCloud(cloud);pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());ne.setSearchMethod(tree);pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);ne.setRadiusSearch(30); // 设置法线估计的半径ne.compute(*cloud_normals);// 法线空间采样pcl::NormalSpaceSampling<pcl::PointXYZ, pcl::Normal> nss;nss.setInputCloud(cloud);nss.setNormals(cloud_normals);nss.setBins(5, 5, 5); // 设置法线空间的bin数量nss.setSample(cloud->size() / 10); // 例如,取原始点云大小的1/10nss.filter(*cloud_downsampled);std::cout << "downsampled cloud size: " << cloud_downsampled->width * cloud_downsampled->height << std::endl;pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0); // 设置背景色viewer->addPointCloud<pcl::PointXYZ>(cloud_downsampled, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->initCameraParameters();while (!viewer->wasStopped()){viewer->spinOnce(100);}return 0;
}
相关文章:
点云处理【三】(点云降采样)
点云降采样 第一章 点云数据采集 第二章 点云滤波 第二章 点云降采样 1. 为什么要降采样? 我们获得的数据量大,特别是几十万个以上的点云,里面有很多冗余数据,会导致处理起来比较耗时。 降采样是一种有效的减少数据、缩减计算量…...
GB/T 41510-2022 起重机械安全评估规范 通用要求 摘要
在线预览|GB/T 41510-2022http://c.gb688.cn/bzgk/gb/showGb?typeonline&hcno696806EC48F4105CEF7479EB32C80C9E 知识点: 安全等级定义,设计寿命,剩余寿命,使用寿命。 标准附录有应力的具体解算演示。...

【vr】【unity】白马VR课堂系列-VR开发核心基础05-主体设置-手柄对象的引入和设置
【视频教学】 【白马VR课堂系列-VR开发核心基础05-主体设置-手柄对象的引入和设置】 https://www.bilibili.com/video/BV19D4y1N73i/?share_source=copy_web&vd_source=7f5c96f5a58b7542fc6b467a9824b04e 【内容】 上一节引入了XR Origin并进行了初步设置,运行测试时V…...
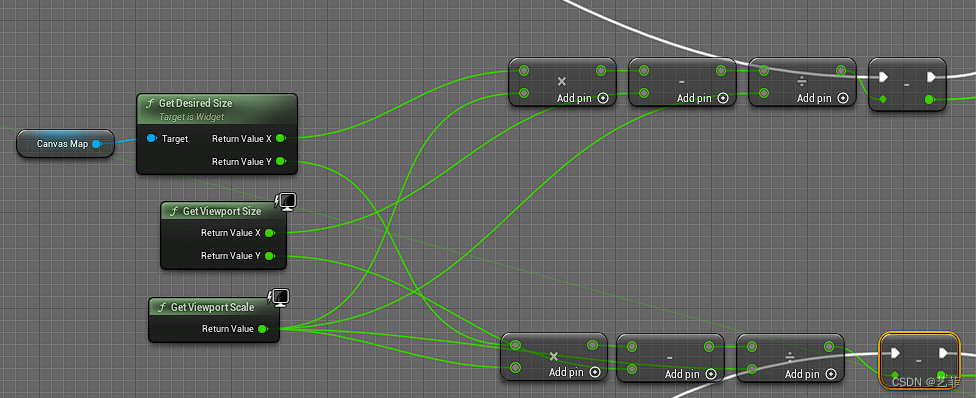
UE5发布Android屏幕适配实践(Blueprint)
之前发了一个文章UE5屏幕适配,后续做项目中又遇到问题,对DPI Scale又有了理解,所以又写了这篇文章。https://mp.csdn.net/mp_blog/creation/editor/133337134https://mp.csdn.net/mp_blog/creation/editor/133337134 DPI Scale Rule使用Short…...

Spanner: Google’s Globally Distributed Database
1. INTRODUCTION Spanner可以扩展到跨数百个数据中心的数百万台机器与数万亿个数据库行。 Spanner是一个可伸缩、全球化分布的数据库,其由Google设计、构建、并部署。在抽象的最高层,Spanner是一个将数据分片(shard)到分布在全世…...

Java基础——了解进制和位运算
文章目录 关于进制位运算左位移右位移无符号右移取反按位与按位或按位异或 关于进制 所有数字在计算机底层都是以二进制的形式存在。 进制的四种表达形式: 二进制:[0,1],满2进1,以0b或0B开头。八进制:[0-7]…...

mybatisplus 自定义mapper加多表联查结合分页插件查询时出现缺失数据的问题
问题描述 最近做项目时使用了mybatisplus,分页插件也使用的是mybatisplus自带的分页插件,业务需求是查询客户列表,每个客户列表中有一个子列表,在通过分页插件查询后,会出现数量总数为子列表总数、客户列表与子列表不…...

陪诊系统|陪诊软件革新陪诊体验解决病患难题
随着医疗服务的不断升级和改善,陪诊系统作为现代医院的一项重要创新,为病患和陪护人员提供了更加便捷、高效的服务体验。本文将全面介绍陪诊系统的功能、特点和优势,让您更好地了解和体验这一创新科技。 一、系统功能 陪诊系统旨在为病患和陪…...

[Tkinter 教程08] Canvas 图形绘制
python - [译][Tkinter 教程08] Canvas 图形绘制 - 个人文章 - SegmentFault 思否 一、简介 Canvas 为 Tkinter 提供了绘图功能. 其提供的图形组件包括 线形, 圆形, 图片, 甚至其他控件. Canvas 控件为绘制图形图表, 编辑图形, 自定义控件提供了可能. 在第一个例子里, …...

ES6 Symbol 数据结构
1. Symbol概念以及引入原因 ES6 引入了的一种新的原始数据类型Symbol,表示独一无二的值。它是 JavaScript 语言的第七种数据类型,前六种是:undefined、null、布尔值(Boolean)、字符串(String)、…...

Redis常用数据类型、Redis常用命令
Redis常用数据类型、Redis常用命令: Redis常用数据类型:1. 字符串String 类型2. 哈希hash 类型3. 列表list 类型4. 集合set 类型5. 有序集合sorted set / zset 类型 Redis常用命令:1. 字符串操作命令2. 哈希操作命令3. 列表操作命令4. 集合操…...

ERP系统是如何运作的?erp管理系统操作流程
ERP系统是如何运作的?ERP系统的运作流程是怎样的? 以简道云ERP管理系统为例: 各行各业适配的ERP系统>>>>https://www.jiandaoyun.com 可以看到上面那个流程图,一般来说,我们把ERP系统可以分为4个大的模…...
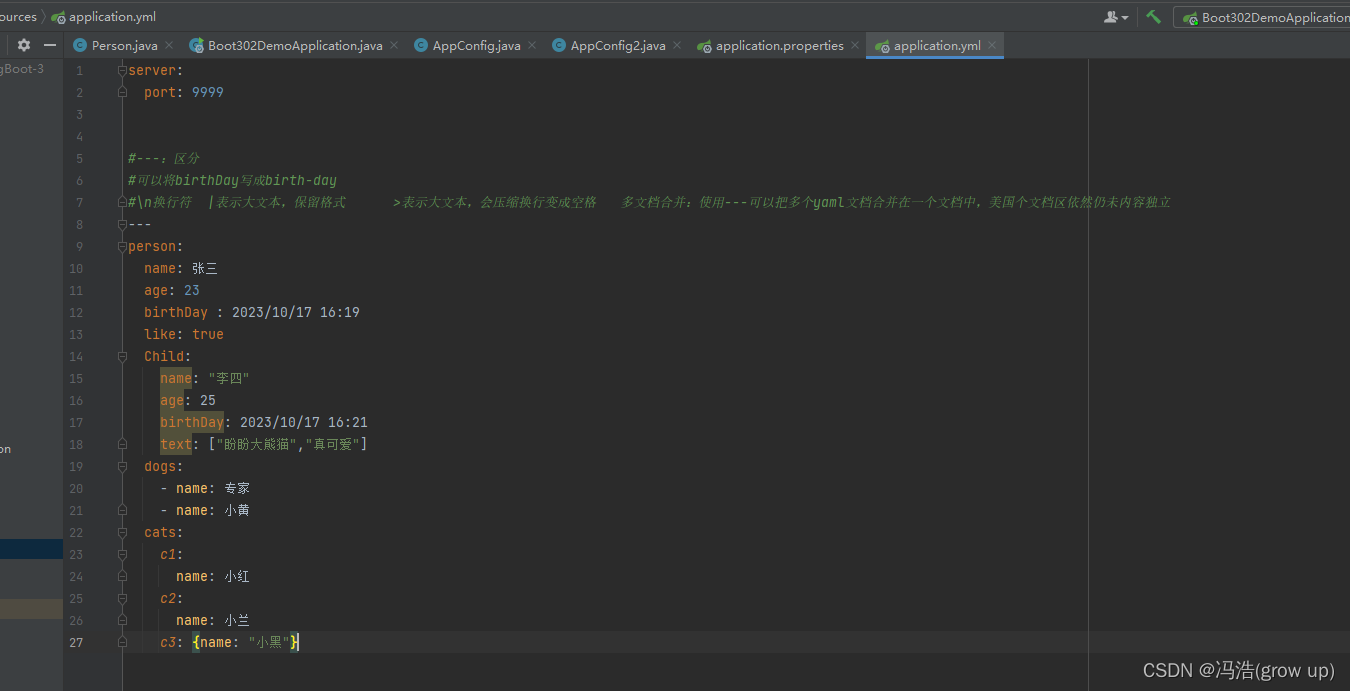
springBoot复杂对象表示和lombok的使用
springBoot复杂对象表示 前言简单案例lombok的使用通过properties文件进行绑定在yaml文件中使用 前言 对象:键值对的集合,如:映射(map)/哈希(hash)/字典(dictionary) 数组:一组按次…...
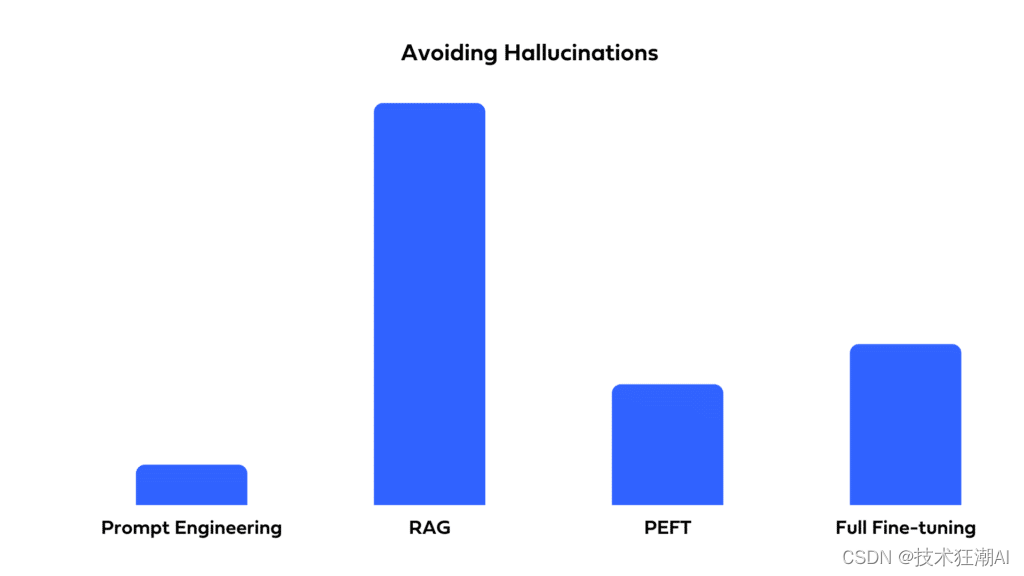
如何选择最适合你的LLM优化方法:全面微调、PEFT、提示工程和RAG对比分析
一、前言 自从ChatGPT问世以来,全球各地的企业都迫切希望利用大型语言模型(LLMs)来提升他们的产品和运营。虽然LLMs具有巨大的潜力,但存在一个问题:即使是最强大的预训练LLM也可能无法直接满足你的特定需求。其原因如…...
)
Jenkins实现CI/CD发布(Ansible/jenkins共享库/gitlab)
Jenkins实现多环境发布 1. 需求介绍 本人负责公司前端业务模块,由于前端模块较多,所以在编写jenkinsfile时会出现很多项目使用的大部分代码相同的情况,为解决这种问题,采用了jenkins的共享库方式优化,并且jenkins要支持…...

使用navicat查看类型颜色
问题描述: 最近遇到一个mongodb的数据问题。 在date日期数据中,混入了string类型的数据,导致查询视图报错: $add only supports numeric or date types解决办法: 使用类型颜色工具。 找到在last_modified_date字段中…...

iOS 中,Atomic 修饰 NSString、 NSArray,也会线程不安全
众所周知,基础类型如 int、float 的变量被 atomic 修饰后就具有原子性,则线程安全。 然而有些情况,atomic 修饰后不一定是线程安全的。 atomic 修饰 NSString,NSArray 的时候,只是保障首地址(数组名&…...
2023医药微信公众号排名榜top100汇总合集
相信每个医药人都或多或少关注了几个医药微信公众号,便于日常了解到最新的医药新闻包括治疗技术、药物研发、研究成果、医学进展、临床试验进展、市场动向等前沿动态。 笔者也不列外,大大小小的公众号收集了有上百个,本着方便查看的目的&…...
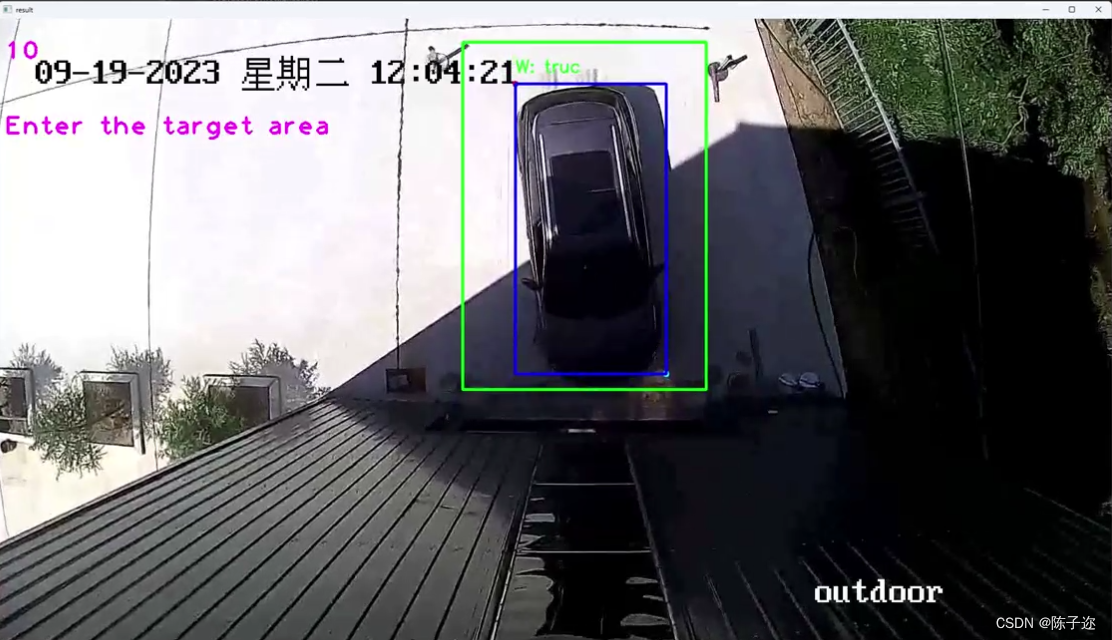
基于YOLO算法的单目相机2D测量(工件尺寸和物体尺寸)三
1.简介 1.1 2D测量技术 基于单目相机的2D测量技术在许多领域中具有重要的背景和意义。 工业制造:在工业制造过程中,精确测量是确保产品质量和一致性的关键。基于单目相机的2D测量技术可以用于检测和测量零件尺寸、位置、形状等参数,进而实…...

Cython编译文件出错
报错信息: (rpc) stuamax:~/segment/dss_crf$ python setup.py install Compiling pydensecrf/eigen.pyx because it changed. Compiling pydensecrf/densecrf.pyx because it changed. [1/2] Cythonizing pydensecrf/densecrf.pyx /home/stu/anaconda3/envs/rpc/l…...

龙虎榜——20250610
上证指数放量收阴线,个股多数下跌,盘中受消息影响大幅波动。 深证指数放量收阴线形成顶分型,指数短线有调整的需求,大概需要一两天。 2025年6月10日龙虎榜行业方向分析 1. 金融科技 代表标的:御银股份、雄帝科技 驱动…...
学习STC51单片机31(芯片为STC89C52RCRC)OLED显示屏1
每日一言 生活的美好,总是藏在那些你咬牙坚持的日子里。 硬件:OLED 以后要用到OLED的时候找到这个文件 OLED的设备地址 SSD1306"SSD" 是品牌缩写,"1306" 是产品编号。 驱动 OLED 屏幕的 IIC 总线数据传输格式 示意图 …...

LLM基础1_语言模型如何处理文本
基于GitHub项目:https://github.com/datawhalechina/llms-from-scratch-cn 工具介绍 tiktoken:OpenAI开发的专业"分词器" torch:Facebook开发的强力计算引擎,相当于超级计算器 理解词嵌入:给词语画"…...

AspectJ 在 Android 中的完整使用指南
一、环境配置(Gradle 7.0 适配) 1. 项目级 build.gradle // 注意:沪江插件已停更,推荐官方兼容方案 buildscript {dependencies {classpath org.aspectj:aspectjtools:1.9.9.1 // AspectJ 工具} } 2. 模块级 build.gradle plu…...

管理学院权限管理系统开发总结
文章目录 🎓 管理学院权限管理系统开发总结 - 现代化Web应用实践之路📝 项目概述🏗️ 技术架构设计后端技术栈前端技术栈 💡 核心功能特性1. 用户管理模块2. 权限管理系统3. 统计报表功能4. 用户体验优化 🗄️ 数据库设…...
C++使用 new 来创建动态数组
问题: 不能使用变量定义数组大小 原因: 这是因为数组在内存中是连续存储的,编译器需要在编译阶段就确定数组的大小,以便正确地分配内存空间。如果允许使用变量来定义数组的大小,那么编译器就无法在编译时确定数组的大…...

Spring是如何解决Bean的循环依赖:三级缓存机制
1、什么是 Bean 的循环依赖 在 Spring框架中,Bean 的循环依赖是指多个 Bean 之间互相持有对方引用,形成闭环依赖关系的现象。 多个 Bean 的依赖关系构成环形链路,例如: 双向依赖:Bean A 依赖 Bean B,同时 Bean B 也依赖 Bean A(A↔B)。链条循环: Bean A → Bean…...
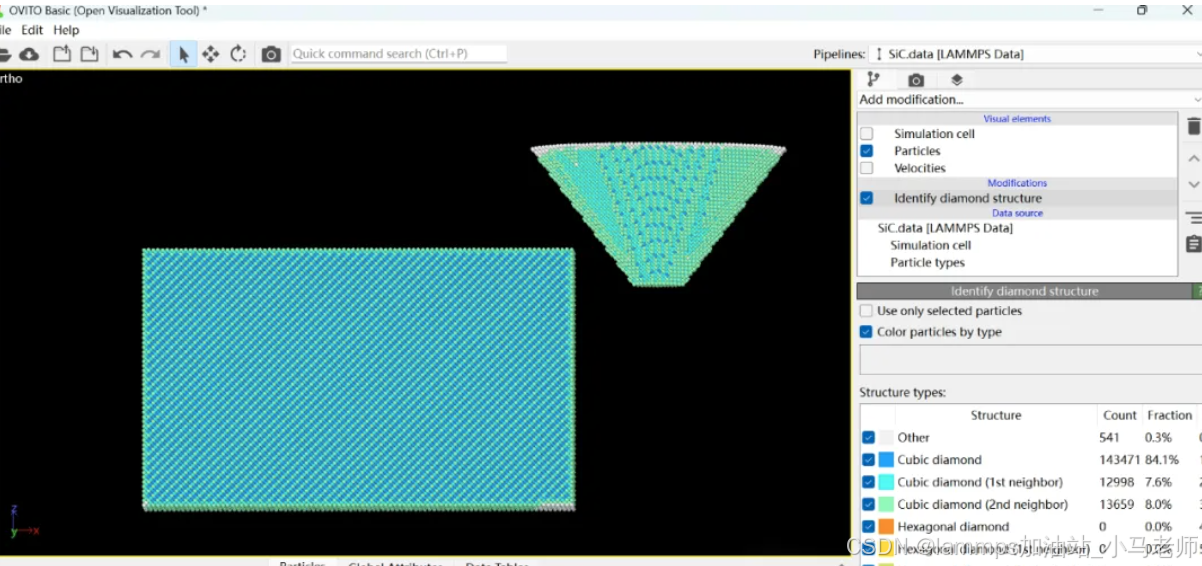
Python Ovito统计金刚石结构数量
大家好,我是小马老师。 本文介绍python ovito方法统计金刚石结构的方法。 Ovito Identify diamond structure命令可以识别和统计金刚石结构,但是无法直接输出结构的变化情况。 本文使用python调用ovito包的方法,可以持续统计各步的金刚石结构,具体代码如下: from ovito…...
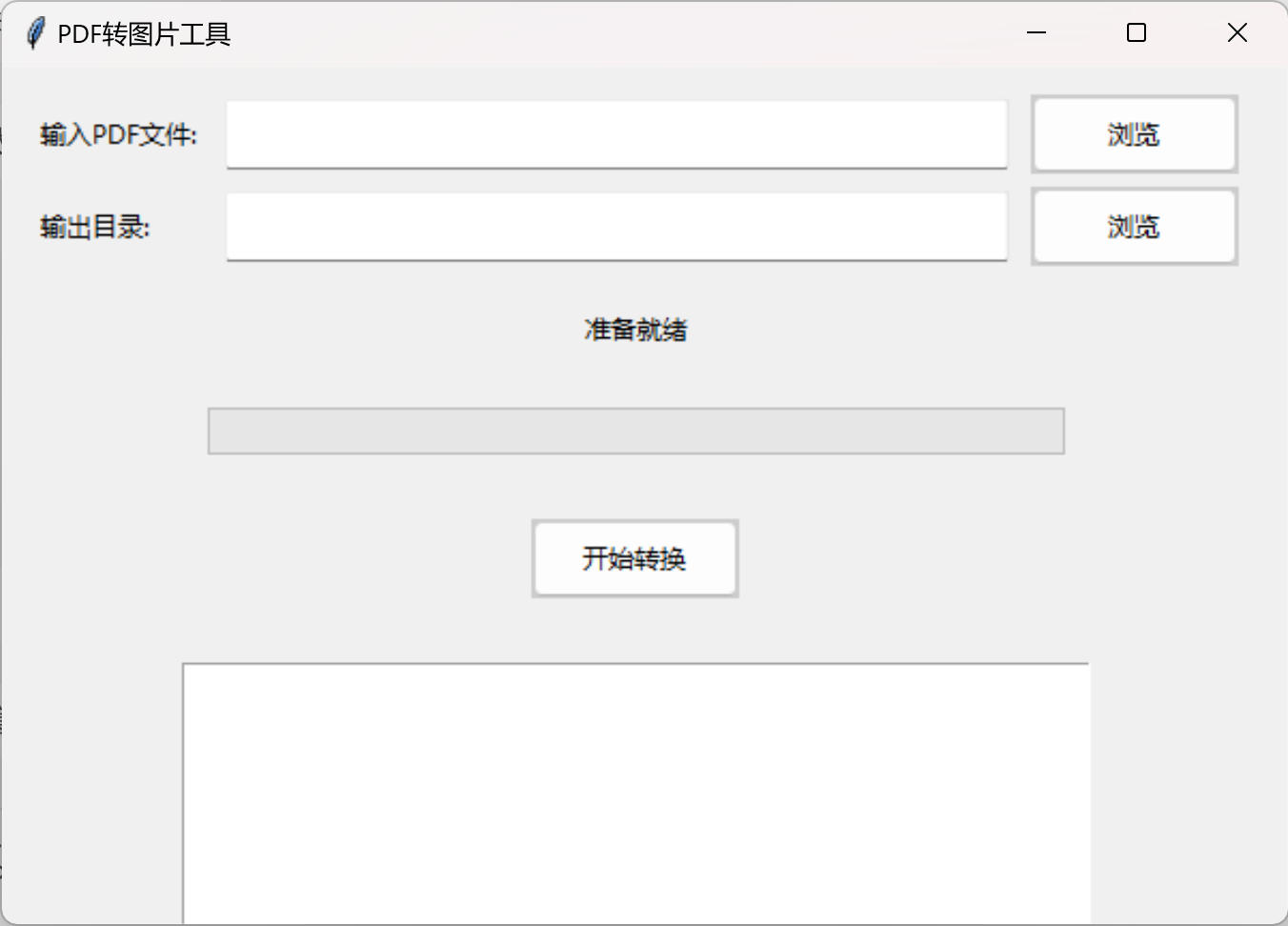
免费PDF转图片工具
免费PDF转图片工具 一款简单易用的PDF转图片工具,可以将PDF文件快速转换为高质量PNG图片。无需安装复杂的软件,也不需要在线上传文件,保护您的隐私。 工具截图 主要特点 🚀 快速转换:本地转换,无需等待上…...

深入理解Optional:处理空指针异常
1. 使用Optional处理可能为空的集合 在Java开发中,集合判空是一个常见但容易出错的场景。传统方式虽然可行,但存在一些潜在问题: // 传统判空方式 if (!CollectionUtils.isEmpty(userInfoList)) {for (UserInfo userInfo : userInfoList) {…...