STM32 CAN多节点组网项目实操 挖坑与填坑记录2
系列文章,持续探索CAN多节点通讯,
上一篇文章链接:
STM32 CAN多节点组网项目实操 挖坑与填坑记录-CSDN博客文章浏览阅读120次。CAN线性组网项目开发过程中遇到的数据丢包问题,并尝试解决的记录和推测分析。开发了一个多节点线性组网采集数据的项目。系统包含1个供电和数据网关板还有最多10个节点。节点之间和网关之间通过CAN通讯。硬件环境节点软件开发环境节点IAR 8.32.1VSCODE软件支持包ST HAL 库硬件环境网关板软件开发环境节点KEIL5.14VSCODE软件支持包ST HAL 库PC上位机环境windows10USB-CAN PC上位机CANAGAROOPC串口助手。https://blog.csdn.net/qq_21370051/article/details/134919608?spm=1001.2014.3001.5502
摘要
CAN线性组网项目开发过程中遇到的数据丢包问题,并尝试解决的记录和推测分析。
关键词
CAN串联多节点通讯、CAN10节点通讯、CAN数据丢包、STM32 CAN
背景/项目介绍
概述:
开发了一个多节点线性组网采集数据的项目。
系统包含1个供电和数据网关板还有最多10个节点。
节点之间和网关之间通过CAN通讯。
网关板主要功能:
1.是给总线上每个节点供电
2.并将CAN协议转换为USB CDC设备和PC上位机通讯。
节点的功能:
采集当前位置数据,并通过CAN协议上传给网关板。
通讯线束
CAT6 六类网线,用的网线来传输CAN信号,取网线中的1对双绞线来做CAN_H CAN_L通讯,再取2对网线来做供电,由网关板输出DC12到网线,以此给10个节点做供电,算是自己做了个POE供电,不过是非标的,哈哈哈哈。
节点硬件设计:
一个STM32单片机、两个不带网络变压器的RJ45插座。CAN收发器芯片。
两个RJ45插座完全并联,当接线时,一个用来插入上一个节点延展出的网线水晶头,另一个RJ45插座插入一条网线用来连接下一个节点。
整体系统总线布局

虽然系统物理宏观角度来看是线性连接的,但其实内部每个节点还是通过CAN_H CAN_L挂载到总线上的。类似上图的链接方式。
运行开发环境介绍
| 硬件环境 节点 | STM32F091CCT6 J-LINK V11 |
| 软件开发环境 节点 | IAR 8.32.1 VSCODE |
| 软件支持包 | ST HAL 库 |
| 硬件环境 网关板 | STM32F072C816 J-LINK V11 |
| 软件开发环境 节点 | KEIL5.14 VSCODE |
| 软件支持包 | ST HAL 库 |
| PC上位机环境 | windows10 |
| USB-CAN PC上位机 | CANAGAROO |
| PC串口助手 | Serial Port Utility |
实验1:
实验条件:
测试条件,在最高18层的居民楼馁,网关板在二居室卧室里,后级网线从市内拉到居民楼楼道内,随楼道步梯往楼上呈“之”字形往楼上延伸。网关板和PC之间是USB-TYPE-C线连接,协议为USB-TTL 。
节点布局:
CAN网关板和第一个节点之间用50米的CAT6网线,第二个节点到第十个节点之间都是2米的CAT6网线。
节点间的2米网线没有伸展开,绕圈放置。
线束材料:
CAT6类网线,我是用网线来传输的CAN信号,并且用网线来传输12V DC给接点供电。
其中第一根网线10米,其余为5米。
通讯波特率:
10k
接入节点:
实验1接入的是1.2.3.4.5.6.7.8.9.10 这几个节点。
接点接入方法1:
先开启网关板的供电,然后一个个接入节点设备
节点接入方法2:
先不开启网关板供电,先将所有节点接好,然后再开启网关板供电,所有节点上电。或者是用“节点接入方法1”接好总线后,再给网关板断电,然后重新上电,都是为了实现一个所有节点同时上电。
实验发现
只能接收到 5节点的数据。
实验2:
实验条件:
线束材料:
和实验1 相同。
通讯波特率:
10k
接入节点:
也接入的是1.2.3.4.5.6.7.8 9.10 这几个节点。
线束布局:
和实验1 相同。
实验变量:
在实验1的基础上,将节点间的2米网线伸展开。
实验发现
只能接收到6个节点的数据。

总结扩展
我为了增加通讯距离,已经将通讯速率降低到了10Kbps,理论上通讯距离50米应该没问题啊,我之前设置125Kbps,也是网关+10个节点,第一个节点和网关之间20米CAT6网线,节点之间5米网线实验时,通讯是正常的,总长度已经是70米了。而今天的实验,任意两节点间距离达到了50米就出现了如此严重的丢数据现象,是不能接受的。
实验3:
实验条件
线束材料、通讯波特率同实验2。
实验变量
找一个普通节点相同的电路板,将程序改为收到就转发。让他成为一个中继节点。
接入节点:
中继1 节点:1 2 3 4 5 6 7 8 9 10
节点布局:
网关板和第一个中继板之间为10米蓝色的超六类双屏蔽的网线
再接20米的灰色普通CAT6网线。后面的10个节点之间为2米的CAT6网线。
因为空间受限,节点之间的网线没有全延展开。
程序修改
收到CAN数据就原封不动转发的代码实现如下:
uint16_t RecvCanDataToCmdQueue(void)
{// uint8_t lu8_sta =0;// uint16_t lu16_temp =0;// memset(&UpComCmdDP,0,sizeof(UpComCmdDP));// memset(&gu8Ar_Result,0,sizeof(gu8Ar_Result)); CanDataRx_TypeDef ls_CanRxData;CanDataTx_TypeDef Frame;ErrorStatus err = SUCCESS;uint16_t lu16_cnt = 0;uint32_t lu32_sta =0;uint16_t lu16_temp =0;memset(&Frame,0,sizeof(Frame));memset(&UpComCmdDP,0,sizeof(UpComCmdDP));memset(&ls_CanRxData,0,sizeof(ls_CanRxData));lu16_cnt = QUEUE_StructOut(&QueCanRxData,&ls_CanRxData,1); // CanDataTx_TypeDef Frame;// ErrorStatus err = SUCCESS;// memset(&Frame,0,sizeof(Frame));if(gu8_DecvType == M_Repeater){if(1 == lu16_cnt) {Frame.Header.IDE = CAN_ID_EXT;Frame.Header.StdId = ls_CanRxData.Header.StdId;Frame.Header.ExtId = ls_CanRxData.Header.ExtId;Frame.Header.RTR = CAN_RTR_DATA; Frame.Header.DLC = 8; Frame.DataBuf[0] = ls_CanRxData.DataBuf[0];Frame.DataBuf[1] = ls_CanRxData.DataBuf[1];Frame.DataBuf[2] = ls_CanRxData.DataBuf[2]; Frame.DataBuf[3] = ls_CanRxData.DataBuf[3]; Frame.DataBuf[4] = ls_CanRxData.DataBuf[4]; Frame.DataBuf[5] = ls_CanRxData.DataBuf[5]; Frame.DataBuf[6] = ls_CanRxData.DataBuf[6]; Frame.DataBuf[7] = ls_CanRxData.DataBuf[7]; err = CanPackData2TxQue(&Frame);if(err!= SUCCESS){myprintf(DEBUG_UART,"CanPackData2TxQue ERR \r\n");return ERROR;}}}else{if(1 == lu16_cnt) {if(gS_SysParm.PCCanID == ls_CanRxData.Header.ExtId ) //如果数据是从PC发来的{if( ( gS_SysParm.LocalCanID == ls_CanRxData.DataBuf[0] ) || ( BROADCAST_CANID == ls_CanRxData.DataBuf[0] ) ) //如果是发送给本设备的{ if( MC_SEND_MESS == ls_CanRxData.DataBuf[1] ) //判断MESSAGETYPE{switch (ls_CanRxData.DataBuf[2]){case MC_WIHTE_BALANCE_START:{UpComCmdDP.CMD_TYPE = UPM_WHITE_BLANCE_START; lu32_sta = QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1);if(1 == lu32_sta){APP_ACK2PC_CanTxQue(MC_WIHTE_BALANCE_START,0);}else{myprintf(DEBUG_UART,"QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1) ERR\r\n");}}break;case MC_OPEN_LED:{UpComCmdDP.CMD_TYPE = UPM_SET_TCS_LED_PWM_START;if(ls_CanRxData.DataBuf[3] < 1){UpComCmdDP.u32Value = 1;}else if(ls_CanRxData.DataBuf[3] > 10){UpComCmdDP.u32Value = 10;} else{UpComCmdDP.u32Value = ls_CanRxData.DataBuf[3];}uint8_t lu8_val = (uint8_t)UpComCmdDP.u32Value;// UpComCmdDP.u32Value = MC_TCS_LED_INIT_PWM;lu32_sta = QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1);if(1 == lu32_sta){APP_ACK2PC_CanTxQue(MC_OPEN_LED,lu8_val);}else{myprintf(DEBUG_UART,"QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1) ERR\r\n");} }break; case MC_CLOSE_LED:{UpComCmdDP.CMD_TYPE = UPM_CLOSE_TCS_LED; UpComCmdDP.u32Value = 0;lu32_sta = QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1);if(1 == lu32_sta){APP_ACK2PC_CanTxQue(MC_CLOSE_LED,0);}else{myprintf(DEBUG_UART,"QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1) ERR\r\n");} }break; case MC_OPEN_RGB_DATAUP:{UpComCmdDP.CMD_TYPE = UPM_OPEN_RGB_DATAUP; lu32_sta = QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1);if(1 == lu32_sta){APP_ACK2PC_CanTxQue(MC_OPEN_RGB_DATAUP,0);}else{myprintf(DEBUG_UART,"QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1) ERR\r\n");} }break; case MC_CLOSE_RGB_DATAUP:{UpComCmdDP.CMD_TYPE = UPM_CLOSE_RGB_DATAUP; lu32_sta = QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1);if(1 == lu32_sta){APP_ACK2PC_CanTxQue(MC_CLOSE_RGB_DATAUP,0);}else{myprintf(DEBUG_UART,"QUEUE_StructIn(&UpMachComCmdQue,&UpComCmdDP,1) ERR\r\n");} }break; default:myprintf(DEBUG_UART,"{ CAN_UPM: unknow DataBuf[2] 002 !!}\r\n"); break;}} // else if( MC_ACK_MESS == ls_CanRxData.DataBuf[1] ) //判断MESSAGETYPE// {// }// else if( MC_AUTO_UP == ls_CanRxData.DataBuf[1] ) //判断MESSAGETYPE// {// } } }} //endof if(1 == lu16_cnt) }//endof elsereturn 1;//1条指令解析成功,入通讯命令队列
}实验发现
10个节点全都能收到数据了。

备注:
监听软件,CANGAROO。
敬请期待
没来得及继续探究剩下的问题,欢迎关注,后面我会记录并更新我的程序更改和实验方案~
关注我不迷路。
相关文章:

STM32 CAN多节点组网项目实操 挖坑与填坑记录2
系列文章,持续探索CAN多节点通讯, 上一篇文章链接: STM32 CAN多节点组网项目实操 挖坑与填坑记录-CSDN博客文章浏览阅读120次。CAN线性组网项目开发过程中遇到的数据丢包问题,并尝试解决的记录和推测分析。开发了一个多节点线性…...

Flink 数据类型 TypeInformation信息
Flink流应用程序处理的是以数据对象表示的事件流。所以在Flink内部,我么需要能够处理这些对象。它们需要被序列化和反序列化,以便通过网络传送它们;或者从状态后端、检查点和保存点读取它们。为了有效地做到这一点,Flink需要明确知…...

基于python的leetcode算法介绍之递归
文章目录 零 算法介绍一 简单示例 辗转相除法Leetcode例题与思路[509. 斐波那契数](https://leetcode.cn/problems/fibonacci-number/)解题思路:题解: [206. 反转链表](https://leetcode.cn/problems/reverse-linked-list/)解题思路:题解&…...
2023年度佳作:AIGC、AGI、GhatGPT、人工智能大语言模型的崛起与挑战
目录 前言 01 《ChatGPT 驱动软件开发》 内容简介 02 《ChatGPT原理与实战》 内容简介 03 《神经网络与深度学习》 04 《AIGC重塑教育》 内容简介 05 《通用人工智能》 目 录 前言 2023年是人工智能大语言模型大爆发的一年,一些概念和英文缩写也在这一…...
Axure的交互以及情形的介绍
一. 交互 1.1 交互概述 通俗来讲就是,谁用了什么方法做了什么事情,主体"谁"对应的就是axure中的元件,"什么方法"对应的就是交互事件,比如单击事件、双击事件,"什么事情"对应的就是交互…...
【MATLAB第84期】基于MATLAB的波形叠加极限学习机SW-ELM代理模型的sobol全局敏感性分析法应用
【MATLAB第84期】基于MATLAB的波形叠加极限学习机SW-ELM代理模型的sobol全局敏感性分析法应用 前言 跟往期sobol区别: 1.sobol计算依赖于验证集样本,无需定义变量上下限。 2.SW-ELM自带激活函数,计算具有phi(x)e^x激…...
米游社区表情包整合网站源码
源码介绍 米游社表情包整合网站源码,来自Github大佬的项目,包含米游兔123枚,米游社 玩家12枚,崩坏 星穹铁道112枚,绝区零218枚,NAP32枚,崩坏RPG62枚,崩坏3-1282枚,原神 …...

easyexcel调用公共导出方法导出数据
easyexcel备忘 Slf4j public class ConditionDownloadUtil {//扫描在xboot 包下所有IService 接口的子类, 每次启动服务后, 重新扫描public final static Class[] classesExtendsIService ClassUtil.scanPackageBySuper("cn.exrick.xboot", IService.class).toArra…...
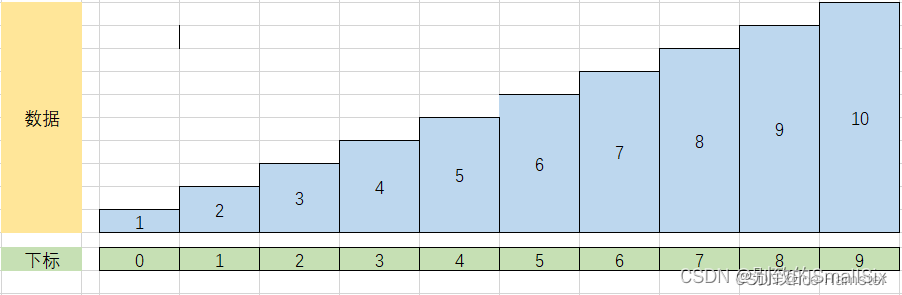
C语言插入排序算法及代码
一、原理 在待排序的数组里,从数组的第二个数字开始,通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插入。 二、代码部分 #include<stdio.h> #include<stdlib.h> int ma…...
2023年中国法拍房用户画像和数据分析
法拍房主要平台 法拍房主要平台有3家,分别是阿里、京东和北交互联平台。目前官方认定纳入网络司法拍卖的平台共有7家,其中阿里资产司法拍卖平台的挂拍量最大。 阿里法拍房 阿里法拍房数据显示2017年,全国法拍房9000套;2018年&a…...

Android 清除临时文件,清空缓存
python 代码: import os import shutil import tracebackdef delete_folder(path):if os.path.exists(path):print(f"删除文件夹: {path}")shutil.rmtree(path)print("删除完成")def delete_file(path):if os.path.exists(path):print(f"删…...
Guava限流神器:RateLimiter使用指南
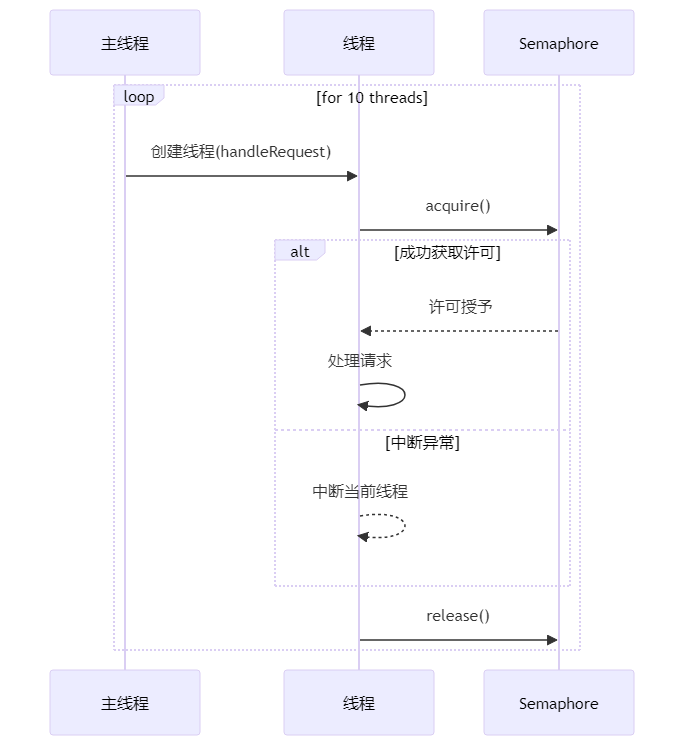
1. 引言 可能有些小伙伴听到“限流”这个词就觉得头大,感觉像是一个既复杂又枯燥的话题。别急,小黑今天就要用轻松易懂的方式,带咱们一探RateLimiter的究竟。 想象一下,当你去超市排队结账时,如果收银台开得越多&…...
【六大排序详解】开篇 :插入排序 与 希尔排序
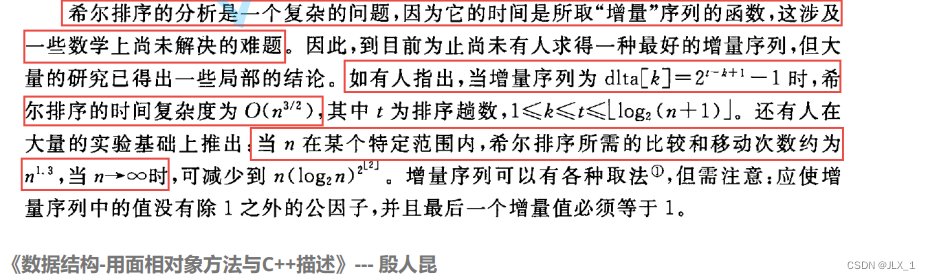
插入排序 与 希尔排序 六大排序之二 插入排序 与 希尔排序1 排序1.1排序的概念 2 插入排序2.1 插入排序原理2.2 排序步骤2.3 代码实现 3 希尔排序3.1 希尔排序原理3.2 排序步骤3.3 代码实现 4 时间复杂度分析 Thanks♪(・ω・)ノ下一篇文章见&am…...

凸优化问题求解
这里写目录标题 1. 线性规划基本定理2.单纯形法2.1 转轴运算 3. 内点法3.1 线性规划的内点法 1. 线性规划基本定理 首先我们指出,线性规划均可等价地化成如下标准形式 { min c T x , s . t A x b , x ⪰ 0 , \begin{align}\begin{cases}\min~c^Tx,\\\mathrm{s.…...

文件操作入门指南
目录 一、为什么使用文件 二、什么是文件 2.1 程序文件 2.2 数据文件 2.3 文件名 三、文件的打开和关闭 3.1 文件指针 3.2 文件的打开和关闭 四、文件的顺序读写 编辑 🌻深入理解 “流”: 🍂文件的顺序读写函数介绍: …...

Axure之交互与情节与一些实例
目录 一.交互与情节简介 二.ERP登录页到主页的跳转 三.ERP的菜单跳转到各个页面的跳转 四.省市联动 五.手机下拉加载 今天就到这里了,希望帮到你哦!!! 一.交互与情节简介 "交互"通常指的是人与人、人与计算机或物体…...
)
【数据库设计和SQL基础语法】--连接与联接--多表查询与子查询基础(二)
一、子查询基础 1.1 子查询概述 子查询是指在一个查询语句内部嵌套另一个查询语句的过程。子查询可以嵌套在 SELECT、FROM、WHERE 或 HAVING 子句中,用于从数据库中检索数据或执行其他操作。子查询通常返回一个结果集,该结果集可以被包含它的主查询使用…...
Android studio中导入opencv库
具体opencv库的导入流程参考链接:Android Studio开发之路 (五)导入OpenCV以及报错解决 一、出现的错误:NullPointerException: Cannot invoke “java.io.File.toPath()” because “this.mySdkLocation” is null 解决办法&#…...
_基础知识)
Linux(1)_基础知识
第一部分 一、Linux系统概述 创始人:芬兰大学大一的学生写的Linux内核,李纳斯托瓦兹。 Linux时unix的类系统; 特点:多用户 多线程的操作系统; 开源操作系统; 开源项目:操作系统,应用…...

网络相关面试题
简述 TCP 连接的过程(淘系) 参考答案: TCP 协议通过三次握手建立可靠的点对点连接,具体过程是: 首先服务器进入监听状态,然后即可处理连接 第一次握手:建立连接时,客户端发送 syn 包…...

基于深度学习的YOLO11的河道垃圾识别 海洋垃圾检测与垃圾分类项目介绍
文章目录基于YOLOv8的河道及海洋垃圾检测与垃圾分类项目介绍一、YOLOv8简介二、项目背景与意义三、基于YOLOv8的垃圾检测与分类系统四、数据集构建五、具体训练代码教程六、结论…...

00101
1001101...

Dify 2026工作流引擎升级全解析:如何用新编排能力将AI应用交付周期缩短67%?
第一章:Dify 2026工作流引擎升级全景概览Dify 2026版本对工作流引擎进行了深度重构,核心目标是提升低代码编排能力、增强异步任务可观测性,并原生支持多模态节点协同执行。本次升级不再依赖外部调度中间件,而是将轻量级事件总线与…...
)
Entity Framework Core 10向量搜索集成崩溃全复盘(含Microsoft.Data.Sqlite v8.0.10+OpenAI Embedding适配陷阱)
第一章:Entity Framework Core 10向量搜索集成崩溃全复盘(含Microsoft.Data.Sqlite v8.0.10OpenAI Embedding适配陷阱)崩溃现象与根本诱因 在 Entity Framework Core 10 中启用 SQLite 向量搜索时,应用在调用 SaveChangesAsync() …...

量子退火实战避坑指南:约束条件转哈密顿量,你的M值真的设对了吗?
量子退火实战避坑指南:约束条件转哈密顿量,你的M值真的设对了吗? 量子退火算法在解决组合优化问题时展现出独特优势,但许多初学者在将约束条件转化为哈密顿量时,常常陷入一个关键陷阱——惩罚系数M值的设定。这个问题…...
)
进程概念(1)
目录 1.冯诺依曼体系结构 1.软件运行,必须先加载?程序运行之前,在哪里? 可不可以没有存储器呢? 理解数据流动 2.操作系统 1》一个基本的程序集合,称为操作系统(OS) 2》设计OS的目的 3》理解操作系统…...

S32K3XX车载以太网驱动实战:从PHY芯片选型到MAC层配置的完整避坑指南
S32K3XX车载以太网驱动实战:从PHY芯片选型到MAC层配置的完整避坑指南 在智能驾驶和车联网技术快速发展的今天,车载以太网已成为连接ECU、传感器和网关的核心通信架构。作为NXP面向汽车电子推出的明星产品,S32K3XX系列凭借其高性能ARM Cortex-…...

DDrawCompat终极指南:3步解决Windows老游戏兼容性问题
DDrawCompat终极指南:3步解决Windows老游戏兼容性问题 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mirrors/dd/DDrawC…...

Bruno Simon Folio 2019音效设计:终极空间音频与交互反馈指南
Bruno Simon Folio 2019音效设计:终极空间音频与交互反馈指南 【免费下载链接】folio-2019 项目地址: https://gitcode.com/gh_mirrors/fo/folio-2019 Bruno Simon Folio 2019是一个融合视觉与听觉体验的创新项目,其音效设计系统通过精准的交互反…...

C# .NET 11 AI推理性能翻倍的秘密:仅启用这1个Runtime参数+2处Span重构,实测Qwen-1.5B吞吐达142 RPS
第一章:C# .NET 11 AI 模型推理加速 性能调优指南.NET 11 引入了原生 ONNX Runtime 集成增强、跨平台 SIMD 向量化推理支持,以及 JIT 编译器对 Span 和 ReadOnlyMemory 的深度优化,为 C# 中的 AI 模型推理提供了前所未有的低延迟潜力。开发者…...