紫光展锐T760_芯片性能介绍_展锐T760安卓核心板定制
展锐T760核心板是一款基于国产5G芯片的智能模块,采用紫光展锐T760制程工艺为台积电6nm工艺,支持工艺具有出色的能效表现。其采用主流的4+4架构的八核设计,包括4颗2.2GHz A76核心和4颗A55核心设计,内存单元板载可达8GB Ram+256GB ROM,运行Android 13以上操作系统,性能强大且功能丰富。
展锐T760芯片还具有丰富的多媒体处理功能,GPU采用的是650MHz的ARM Mali G57,支持4K视频编解码,支持HDMI输出、LVDS输出,还支持双屏异显,使其在多媒体应用领域具有明显的优势。同时,展锐T760芯片还支持多种摄像头配置,搭载了全新3核ISP,支持6400万像素超清四摄,能够满足不同安卓设备的拍摄需求。
为了满足安卓应用的需求,展锐T760核心板还内置了丰富的接口和通信模块,包括USB 3.0、PCIe、HDMI、SPI、GPIO、以太网等接口,以及蓝牙、Wi-Fi、GPS等通信模块,能够轻松应对各种外设连接和网络通信需求。
综上所述,展锐T760安卓核心板以其强大的性能、丰富的功能和灵活的扩展性,为各类安卓应用提供了一种高性价比的解决方案,有望在安卓设备市场上发挥重要作用。展锐T760的问世,将极大地推动国产芯片在5G智能模块领域的发展,为中国电子产业的发展注入了强劲动力。
展锐T760核心板参数如下:
CPU:紫光展锐T760(4×A76@2.2GHz + 4×A55@2.0GHz)
核数:八核
工艺:6nm
GPU:Arm Mali G57
NPU:3.2 TOPS
存储:4G+64G/6G+128G/8G+256G三种配置
显示:FHD+@120Hz
视频解码:4K @30fps 10bit
视频编码:4K @30fps
摄像头:6400万像素超清四摄,normal 32M@25fps,20M+16M@30fps
MIPI:4CD+4D(2+2)+4D(2+2)
蜂窝:NSA/SA/GSM/WCDMA/TDD-LTE/FDD-LTE
Category:NR R15, LTE DL Cat15/UL Cat18
GNSS:GPS+Glonass+Beidou+Galileo
Wi-Fi:802.11 b/g/n/ac
蓝牙:蓝牙5.0
FM:Yes
IO接口
UART*4,其中一路可用于调试
I2C*9,最高速率达 3.4 Mbps
PWM*3
SPI*2
ADC*3
Keypads(用户可自定义)
EINT/GPIOs若干(IO引脚可复用)
SDIO接口:一路SD 3.0,支持 4 位 SDIO
SIM卡接口:SIM*2,支持 1.8/3 V (U)SIM卡
USB接口:USB*1,支持USB3.2 Gen2 Type-C 接口,兼容USB 2.0
相关文章:
紫光展锐T760_芯片性能介绍_展锐T760安卓核心板定制
展锐T760核心板是一款基于国产5G芯片的智能模块,采用紫光展锐T760制程工艺为台积电6nm工艺,支持工艺具有出色的能效表现。其采用主流的44架构的八核设计,包括4颗2.2GHz A76核心和4颗A55核心设计,内存单元板载可达8GB Ram256GB ROM…...

从动力系统研究看当今数学界
6.3... Milnor’s definition of “attractors” which has been criticized above by us). The work of [KSS2] of asserting the existence of “nice open set” of Ω(p.148) would be likely not verified, for example we think the first sentence “… since f is nont…...
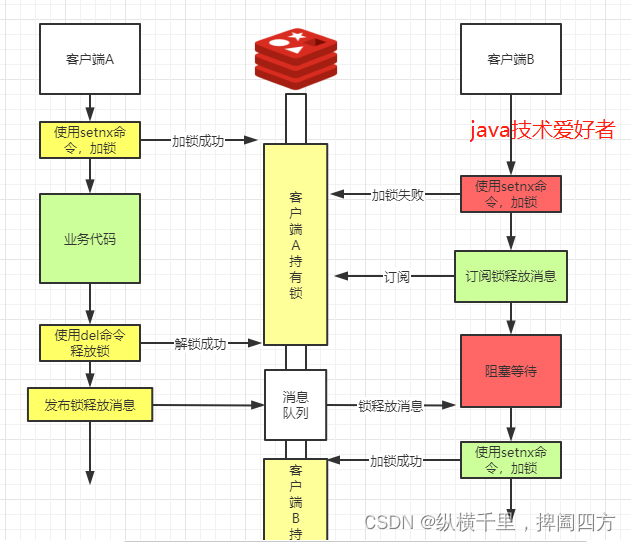
【征服redis15】分布式锁的功能与整体设计方案
目录 1. 分布式锁的概念 2.基于数据库做分布式锁 2.1 基于表主键唯一做分布式锁 2.2 基于表字段版本号做分布式锁 2.3 基于数据库排他锁做分布式锁 3.使用Redis做分布式锁 3.1 redis实现分布式锁的基本原理 3.2 问题一:增加超时机制,防止长期持有…...

MATLAB中实现机械臂逆运动学求解的方法之一是使用阻尼最小二乘法
MATLAB中实现机械臂逆运动学求解的方法之一是使用阻尼最小二乘法。阻尼最小二乘法通常用于处理数值求解问题中的不稳定性和噪声。以下是一个简单的MATLAB代码示例,演示了机械臂逆运动学的阻尼最小二乘法求解: % 机械臂参数 L1 1; % 机械臂长度 L2 1;…...
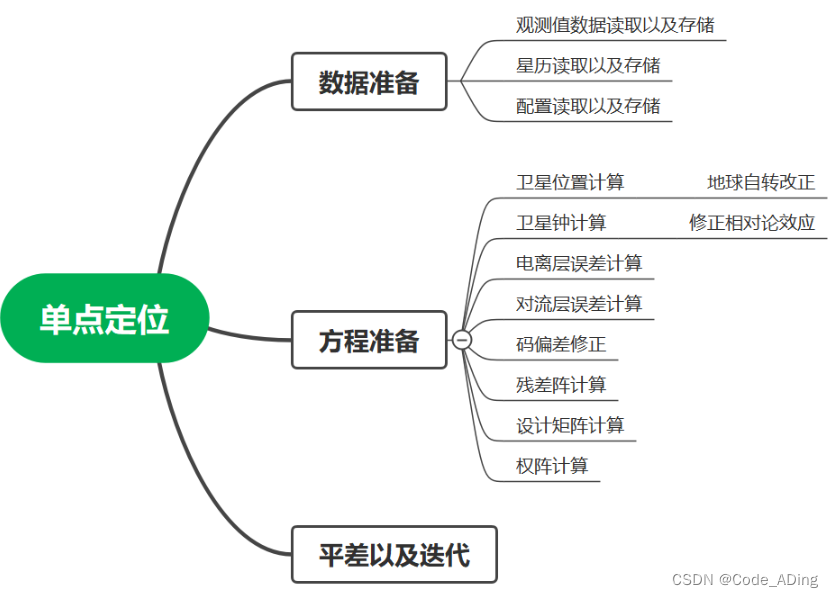
2024.1.24 GNSS 学习笔记
1.伪距观测值公式 2.载波相位观测值公式 3.单点定位技术(Single Point Positionin, SPP) 仅使用伪距观测值,不使用其他的辅助信息获得ECEF框架下绝对定位技术。 使用广播星历的轨钟进行定位,考虑到轨钟的米级精度,所以对于<1米的误差&…...
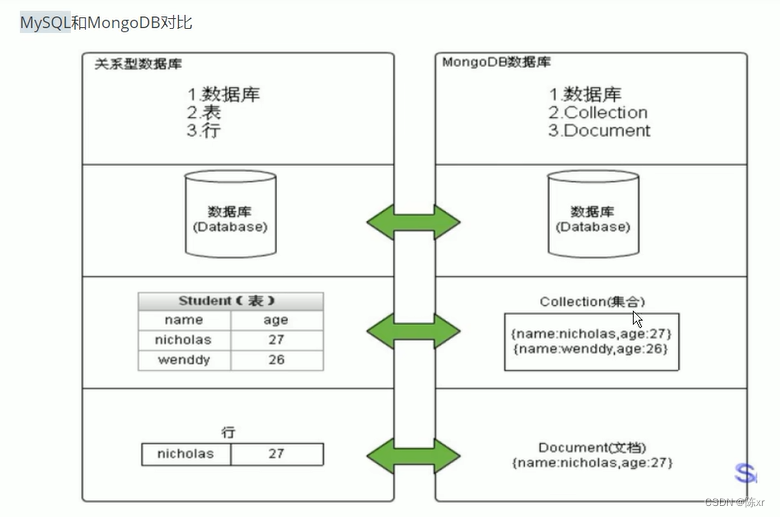
2024-01-22(MongoDB)
1.Mongodb使用的业务场景: 传统的关系型数据库/mysql在“三高”需求以及应对web2.0的网站需求面前,有点力不从心,什么是“三高”需求: a. 对数据库高并发的读写需求 b. 对海量数据的高效率存储和访问需求 c. 对数据库的高可扩…...
无人机航迹规划(六):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁…...
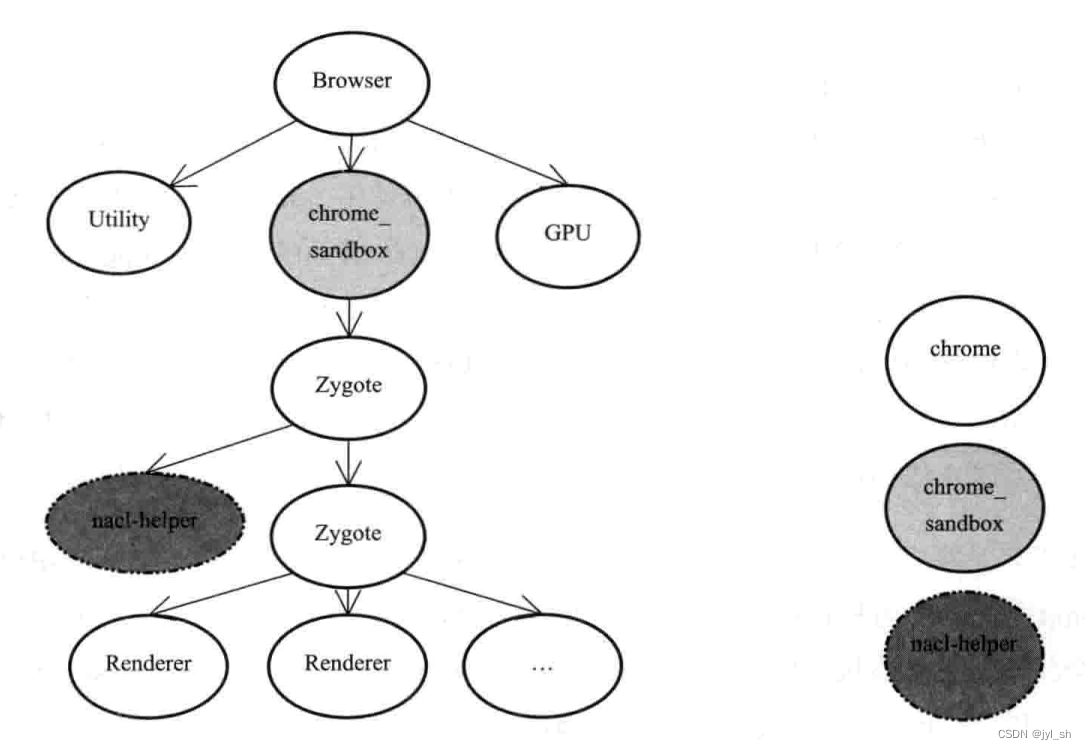
《WebKit 技术内幕》学习之十二(2):安全机制
2 沙箱模型 2.1 原理 一般而言,对于网络上的网页中的JavaScript代码和插件是不受信的(除非是经过认证的网站),特别是一些故意设计侵入浏览器运行的主机代码更是非常危险,通过一些手段或者浏览器中的漏洞,…...

算法优化:LeetCode第122场双周赛解题策略与技巧
接下来会以刷常规题为主 ,周赛的难题想要独立做出来还是有一定难度的,需要消耗大量时间 比赛地址 3011. 判断一个数组是否可以变为有序 public class Solution {public int minimumCost(int[] nums) {if (nums.length < 3) {// 数组长度小于3时&a…...
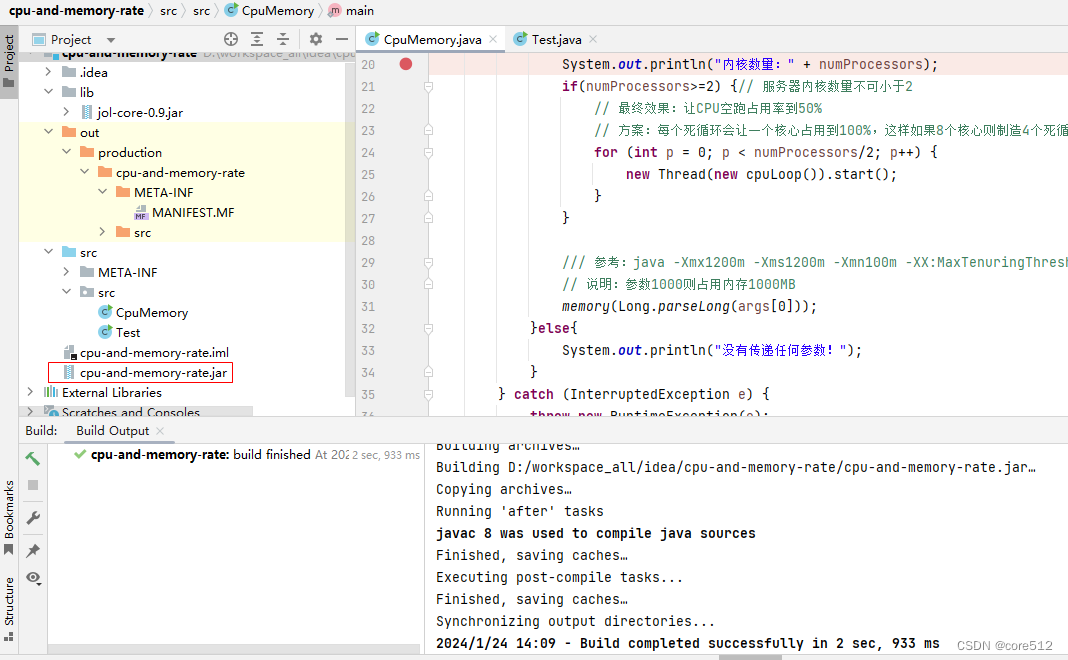
IDEA导出jar
1、选择导出方式 2、选择Main Class 3、构建jar...
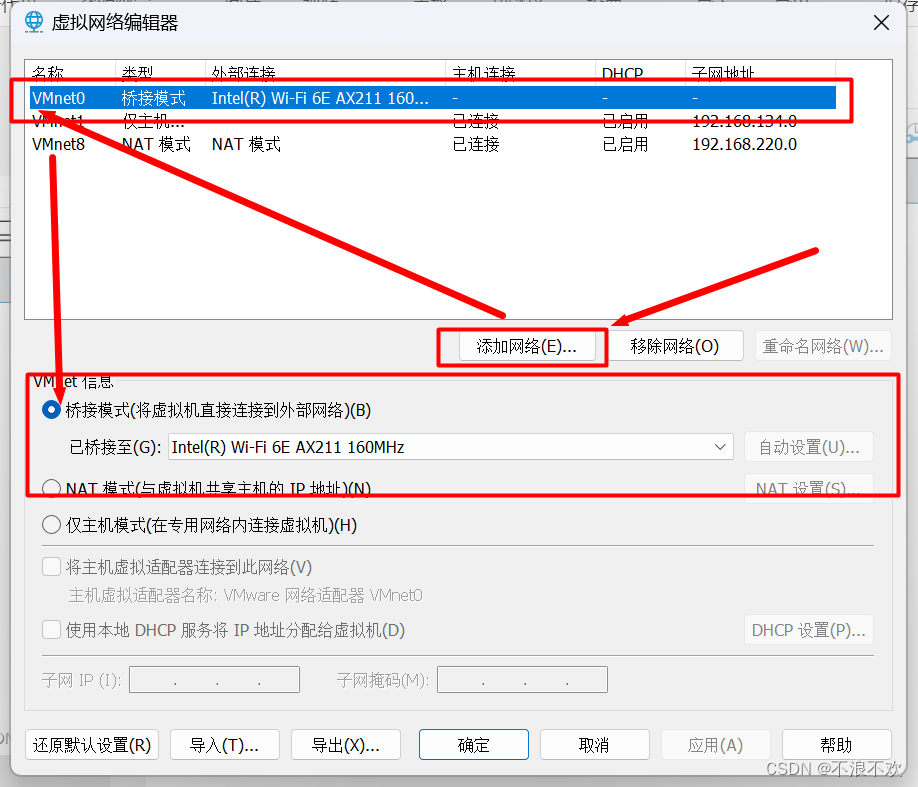
Win10/11中VMware Workstation设置网络桥接模式
文章目录 一、添加VMware Bridge Protocol服务二、配置桥接参数1.启用系统Device Install Service服务2.配置VMware 需要确认物理网卡是否有添加VMware Bridge Protocol服务 添加VMware Bridge Protocol服务 提示:以下是本篇文章正文内容,下面案例可供参…...

html Canvas粒子文字特效
代码有点长,下面是代码: <!DOCTYPE html> <html><head><meta charset"UTF-8"><title>HTML5 Canvas粒子效果文字动画特效DEMO演示</title><link rel"stylesheet" href"css/normalize.c…...

@JsonFormat失效,被jackson自定义配置覆盖
jackson配置类 我的jackson配置类如下,其中serializerByType(LocalDateTime.class, new LocalDateTimeSerializer()) 覆盖了JsonFormat注解 Configuration public class JacksonConfiguration {public static final DateTimeFormatter optionalDateTimePattern (n…...
SaaS系统如何助力企业数字化转型
随着科技的快速发展,数字化转型已经成为企业适应市场变化、提高竞争力的必要手段。在这个过程中,SaaS(软件即服务)系统以其独特的优势,正在成为越来越多企业的首选。乔拓云SaaS系统作为这一领域的佼佼者,更…...

nginx配置内网代理,前端+后端分开配置
安装好后nginx,进入配置文件 我这块安装在了home里面,各位根据自身情况选择 打开nginx.conf文件 在底部查看是否包含这段信息:含义是配置文件包含该路径下的配置文件 include /home/nginx/conf/conf.d/*.conf; # 该路径根据自己的安装位置自行修改 配置文件 进入conf.d文…...
i18n多国语言Internationalization的动态实现
一、数据动态的更新 在上一篇i18n多国语言Internationalization的实现-CSDN博客,可能会遇到一个问题,我们在进行英文或中文切换时,并没有办法对当前的数据进行动态的更新。指的是什么意思呢?当前app.js当中一个组件内容ÿ…...
C++笔记(二)
函数的默认参数 如果我们自己传入数据,就用自己的数据,如果没有,就用默认值 语法: 返回值类型 函数名(形参默认值){} int func(int a,int b20,int c30){} …...

【技能---构建github中SSH密钥的流程】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言SSH基于账号口令的安全验证通过SSH连接到服务器打开终端(命令行界面)使用 SSH 命令连接: 在 Ubuntu 中生成 SSH 密钥并将其添…...

linux-centos服务器离线安装yapi(包含nodejs、mongodb、yapi、pm2离线安装)
yapi是使用vue框架开发的,借助nodejs 前端直接访问的mongodb数据库,离线安装yapi步骤如下 下载离线安装包 下载地址 https://download.csdn.net/download/qq445829096/88778418 离线安装包先复制到 dev/yapi目录(根据自己习惯自定义目录) node-v12.13.0-linux-x64.tar.xz …...

手撕重采样,考虑C的实现方式
一、参考文章: 重采样、上采样、下采样 - 知乎 (zhihu.com) 先直接给结论,正常重采样过程如下: 1、对于原采样率fs,需要重采样到fs1,一般fs和fs1都是整数哈,则先找fs和fs1的最小公倍数,设为m…...

内存分配函数malloc kmalloc vmalloc
内存分配函数malloc kmalloc vmalloc malloc实现步骤: 1)请求大小调整:首先,malloc 需要调整用户请求的大小,以适应内部数据结构(例如,可能需要存储额外的元数据)。通常,这包括对齐调整,确保分配的内存地址满足特定硬件要求(如对齐到8字节或16字节边界)。 2)空闲…...

智慧医疗能源事业线深度画像分析(上)
引言 医疗行业作为现代社会的关键基础设施,其能源消耗与环境影响正日益受到关注。随着全球"双碳"目标的推进和可持续发展理念的深入,智慧医疗能源事业线应运而生,致力于通过创新技术与管理方案,重构医疗领域的能源使用模式。这一事业线融合了能源管理、可持续发…...

电脑插入多块移动硬盘后经常出现卡顿和蓝屏
当电脑在插入多块移动硬盘后频繁出现卡顿和蓝屏问题时,可能涉及硬件资源冲突、驱动兼容性、供电不足或系统设置等多方面原因。以下是逐步排查和解决方案: 1. 检查电源供电问题 问题原因:多块移动硬盘同时运行可能导致USB接口供电不足&#x…...

关于 WASM:1. WASM 基础原理
一、WASM 简介 1.1 WebAssembly 是什么? WebAssembly(WASM) 是一种能在现代浏览器中高效运行的二进制指令格式,它不是传统的编程语言,而是一种 低级字节码格式,可由高级语言(如 C、C、Rust&am…...

IoT/HCIP实验-3/LiteOS操作系统内核实验(任务、内存、信号量、CMSIS..)
文章目录 概述HelloWorld 工程C/C配置编译器主配置Makefile脚本烧录器主配置运行结果程序调用栈 任务管理实验实验结果osal 系统适配层osal_task_create 其他实验实验源码内存管理实验互斥锁实验信号量实验 CMISIS接口实验还是得JlINKCMSIS 简介LiteOS->CMSIS任务间消息交互…...
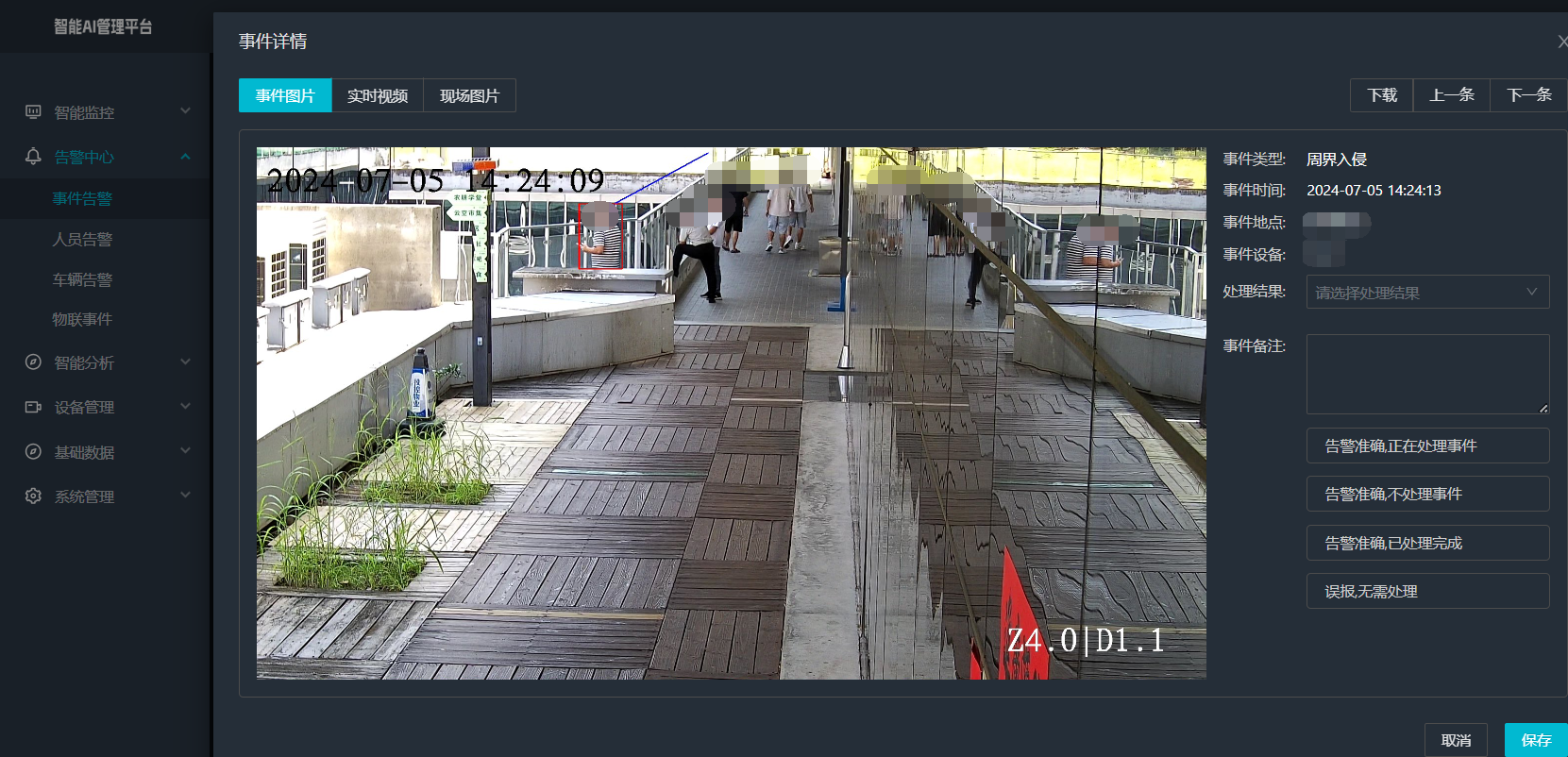
打手机检测算法AI智能分析网关V4守护公共/工业/医疗等多场景安全应用
一、方案背景 在现代生产与生活场景中,如工厂高危作业区、医院手术室、公共场景等,人员违规打手机的行为潜藏着巨大风险。传统依靠人工巡查的监管方式,存在效率低、覆盖面不足、判断主观性强等问题,难以满足对人员打手机行为精…...

Python竞赛环境搭建全攻略
Python环境搭建竞赛技术文章大纲 竞赛背景与意义 竞赛的目的与价值Python在竞赛中的应用场景环境搭建对竞赛效率的影响 竞赛环境需求分析 常见竞赛类型(算法、数据分析、机器学习等)不同竞赛对Python版本及库的要求硬件与操作系统的兼容性问题 Pyth…...

Visual Studio Code 扩展
Visual Studio Code 扩展 change-case 大小写转换EmmyLua for VSCode 调试插件Bookmarks 书签 change-case 大小写转换 https://marketplace.visualstudio.com/items?itemNamewmaurer.change-case 选中单词后,命令 changeCase.commands 可预览转换效果 EmmyLua…...

车载诊断架构 --- ZEVonUDS(J1979-3)简介第一篇
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是…...

Python爬虫实战:研究Restkit库相关技术
1. 引言 1.1 研究背景与意义 在当今信息爆炸的时代,互联网上存在着海量的有价值数据。如何高效地采集这些数据并将其应用于实际业务中,成为了许多企业和开发者关注的焦点。网络爬虫技术作为一种自动化的数据采集工具,可以帮助我们从网页中提取所需的信息。而 RESTful API …...